无人机飞行控制系统模拟器设计
无人机飞行控制半实物仿真系统设计与实现

ISSN 1002-4956 CN11-2034/T实验技术与管理Experimental Technology and M a n a g e m e n t第38卷第3期202丨年3月Vol.38 N o.3Mar. 2021D O I:10.16791/j.c n k i.s j g.2021.03.031无人机飞行控制半实物仿真系统设计与实现吕永玺,屈晓波,史静平(西北工业大学自动化学院,陕西省飞行控制与仿真技术重点实验室,陕西西安710072 )摘要:为保证无人机飞行试验的安全性,提升无人机飞控系统设计的可靠性,自主研发了无人机飞行控制半实物仿真系统。
结合准确的无人机6自由度非线性数学模型和x P C实时系统模块模拟生成无人机飞行状态信息,根据地面站控制指令、传感器故障模注人指令解算获得不同飞行模式和飞行状态下的舵面偏转量,实现了实时系统闭环反馈控制,并驱动舵面偏转检验控制系统的响应速度。
该系统不仅能验证飞控系统的逻辑性和实时性,而且借助虚拟现实技术和航迹地图显示,具备在线整定控制律参数的功能。
该系统模块化程度高,相关硬件和软件对无人机平台和飞控计算机通用性广,依据多平台实验和多架次试飞的实验流程实用性强,为无人机飞控系统开发提供了切实可行、高效可靠的途径。
关键词:飞行控制;实时系统;虚拟现实;在线调参;故障注人中图分类号:V249文献标识码:A文章编号:1002-4956(2021)03-0153-05Design and realization of hardware-in-the-loop simulationsystem for UAV flight controlLYU Yongxi,〇U Xiaobo,SHI Jingping(S h a a n x i P r o v i n c e K e y L a b o r a t o r y o f Flight Control a n d S i m u lation T e c h n o l o g y, S c h o o l o f A u t o m a t i o n,N o r t h w e s t e r n Polytechnical University, X i'a n 710072, C h i n a)Abstract: T o e n s u r e the safety o f U A V flight test a n d i m p r o v e the reliability o f U A V flight control s y s t e m design,the U A V flight control h a r d w a r e-i n-t h e-l o o p s i m u l a t i o n s y s t e m is i n d e p e n d e n t l y d e v e l o p e d.T h e flight statei n f o r m a t i o n o f U A V is g e n e r a t e d b y c o m b i n i n g the a c c u r a t e 6-D O F n o n l i n e a r m a t h e m a t i c a l m o d e l o f U A V a n dx P C real-time s y s t e m m o d u l e. A c c o r d i n g to the g r o u n d station control c o m m a n d a n d s e n s o r fault m o d e injectionc o m m a n d, the deflection o f the control surfaces u nde r different flight m o d e s a n d flight states c a n b e obtained. T h ec l o s e d-l o o p f e ed b a c k control o f the real-time s y s t e m is realized, a n d the control surfaces are d r i v e n to test ther e s p o n s e s p e e d o f the control s y s t e m. T h e s y s t e m c a n not o n l y verify the logic a n d real-time p e r f o r m a n c e o f theflight control s y s t e m,b u t also h a s the function o f onli n e t u n i n g control l a w p a r a m e t e r s w i t h the h e l p o f virtualreality t e c h n o l o g y a n d track m a p display. T h e s y s t e m h a s a h i g h d e g r e e o f m o d u l a r i z a t i o n, a n d the related h a r d w a r ea n d s o f t w a r e are w i d e l y u s e d for the U A V p l a t f o r m a n d flight control c o m p u t e r.A c c o r d i n g to the e x p e r i m e n t a lp r o c e s s o f m a n y p l a t f o r m e x p e r i m e n t s a n d flight tests, the s y s t e m is practical, efficient a n d reliable for thed e v e l o p m e n t o f U A V flight control s y s t e m.Key words: flight control; real t i m e s y s t e m; virtual reality; o n line p a r a m e t e r a d j u s t m e n t; fault injection随着信息技术的发展和社会需求的增长,无人机 目标侦查与打击[4_5]等领域。
用C语言实现的智能无人机航行控制系统设计
用C语言实现的智能无人机航行控制系统设计一、引言随着科技的不断发展,无人机作为一种新型的航空器具备了广泛的应用前景,包括军事侦察、灾害勘测、农业植保等领域。
而无人机的航行控制系统是保证其安全飞行的核心。
本文将介绍如何利用C语言设计智能无人机航行控制系统,实现对无人机的精准控制。
二、智能无人机航行控制系统设计1. 系统架构智能无人机航行控制系统主要由传感器模块、数据处理模块、执行器模块三部分组成。
传感器模块用于获取环境信息,数据处理模块对传感器获取的数据进行处理分析,执行器模块则根据处理结果控制无人机的航行。
2. 传感器模块传感器模块是智能无人机航行控制系统中至关重要的部分,常用的传感器包括陀螺仪、加速度计、气压计等。
这些传感器可以实时获取无人机的姿态、速度、高度等信息,为后续的数据处理提供基础。
3. 数据处理模块数据处理模块负责对传感器获取的数据进行滤波、融合等处理,提取出有用的信息并进行分析。
在C语言中,可以利用各种算法如卡尔曼滤波、PID控制等来实现数据处理模块的功能。
4. 执行器模块执行器模块根据数据处理模块得出的结果,控制无人机的电机、舵机等执行器,实现对无人机航行状态的调节。
通过C语言编程,可以编写相应的控制算法,实现对无人机的精准控制。
三、C语言在智能无人机航行控制系统中的应用1. 高效性能C语言作为一种高效的编程语言,在嵌入式系统中有着广泛的应用。
其快速的运行速度和对硬件的直接操作使得C语言成为设计智能无人机航行控制系统的理想选择。
2. 灵活性C语言具有较高的灵活性,程序员可以根据具体需求编写各种算法和函数,实现对无人机航行状态的精准控制。
同时,C语言也支持指针操作等底层操作,方便与硬件进行交互。
3. 可移植性由于C语言是一种通用性较强的编程语言,编写好的代码可以在不同平台上进行移植和调试。
这意味着设计好的智能无人机航行控制系统可以适用于不同型号和品牌的无人机上。
四、总结通过本文对用C语言实现的智能无人机航行控制系统设计进行介绍,我们了解到了智能无人机航行控制系统的架构和各个模块的功能。
无人机飞行控制系统的设计与实现

无人机飞行控制系统的设计与实现随着科技的不断进步,无人机在各个领域得到了广泛的应用,如军事侦察、航拍摄影、环境监测等。
而无人机的飞行控制系统是其核心技术之一,决定着无人机的飞行性能和稳定性。
本文将重点探讨无人机飞行控制系统的设计与实现。
一、无人机飞行控制系统的概述无人机飞行控制系统是指通过计算机软件和硬件设备对无人机进行飞行模式的控制与调节。
它主要由感知、计算、控制和执行四个部分组成。
感知部分负责采集无人机周围环境信息,计算部分负责根据信息进行数据处理和飞行参数计算,控制部分负责控制无人机的姿态和速度,执行部分负责完成对无人机飞行指令的执行。
这四个部分相互协作,共同实现了无人机的飞行控制。
二、无人机飞行控制系统的主要模块1. 传感器模块传感器模块是无人机飞行控制系统的感知部分,包括陀螺仪、加速度计、罗盘等传感器。
陀螺仪用于测量无人机的角速度,加速度计用于测量无人机的加速度,罗盘用于测量无人机的指向。
通过这些传感器的数据采集,无人机可以获取周围环境的信息。
2. 数据处理模块数据处理模块是无人机飞行控制系统的计算部分,负责对传感器采集的数据进行处理和计算。
这个模块通常由嵌入式处理器实现,可以使用滤波算法、运动学模型等对数据进行滤波、分析和计算,得到无人机的飞行参数。
3. 控制算法模块控制算法模块是无人机飞行控制系统的控制部分,根据无人机当前的飞行参数和目标飞行状态,通过控制算法生成控制信号,控制无人机的姿态和速度。
常用的控制算法有PID控制、模糊控制、自适应控制等。
4. 执行器模块执行器模块是无人机飞行控制系统的执行部分,包括电调、电机等设备。
通过控制信号,执行器模块可以调节电调和驱动电机,实现对无人机动力系统的控制。
三、无人机飞行控制系统的实现无人机飞行控制系统的实现主要包括硬件和软件两个方面。
在硬件方面,需要选购合适的传感器和执行器,保证其性能稳定可靠。
传感器的选购需要考虑其采样频率、精度等因素,执行器的选购需要考虑其功率和转速等因素。
无人地效飞行器控制系统设计

无人地效飞行器控制系统设计陈利【摘要】地面效应飞行器(以下简称地效飞行器)是飞行在近地(水)面的特殊飞行器,由于其飞行高度离水面或地面十分的接近,且飞行速度较快,对操纵人员反应速度要求较高,操作难度大,设计一套无人控制系统便显得尤为必要。
从硬件设计和软件设计2个方面介绍了该系统的设计,以供参考。
该型控制系统已应用于实际项目中。
%WIG is a kind of special craft which flies at high speed near the ground ( water) surface. Due to its high speed and difficult operation, its operator must satisfy the high requirements. This paper desigs a control system suitable for the craft, and then, analy-ses and introduces the overal design scheme from the hardware and software design, to give a reference to you. This control system is applied to the actual project.【期刊名称】《机械制造与自动化》【年(卷),期】2016(000)004【总页数】2页(P183-183,188)【关键词】地面效应;无人飞行器;控制系统【作者】陈利【作者单位】南京航空航天大学自动化学院,江苏南京200016【正文语种】中文【中图分类】V279无人飞行控制系统对于飞行器来说就是像无形的驾驶员。
该控制系统主要包含机载飞控计算机及传感器、地面遥控遥测站和无线传输设备,系统的运行正常与否直接影响任务能否顺利完成。
无人地效飞行器由机载飞控计算机控制,它是控制系统的核心。
无人机系统仿真设计解决方案

无人机系统仿真设计解决方案一想起无人机系统仿真设计,我脑海中立刻浮现出那复杂而又精妙的世界。
无人机,这个曾经只存在于科幻小说中的产物,如今已经渗透到了我们生活的方方面面。
那么,如何设计一套完善的无人机系统仿真解决方案呢?下面,我就用我十年的方案写作经验,为大家详细解答。
我们得明确无人机系统仿真的目标。
无人机系统仿真不仅仅是模拟无人机的飞行,还包括了无人机的控制、导航、通信、任务规划等多个方面。
所以,在设计解决方案时,我们要全面考虑这些因素。
1.仿真平台的选择在选择仿真平台时,我们要考虑到无人机的种类和仿真任务的需求。
目前市面上主流的仿真平台有MATLAB/Simulink、ANSYS、X-Plane 等。
MATLAB/Simulink适合进行算法研究和系统级仿真,ANSYS则擅长于结构分析和动力学仿真,而X-Plane则更侧重于飞行性能的仿真。
2.仿真模型的建立我们要建立无人机的仿真模型。
这个模型应该包括无人机的动力学模型、控制模型、导航模型、通信模型等。
在建立模型时,我们要尽量简化,抓住主要因素,忽略次要因素。
比如,在动力学模型中,我们可以忽略无人机的弹性变形,将其视为刚体。
3.仿真参数的设置在仿真参数设置方面,我们要根据无人机的实际参数来设置。
这些参数包括无人机的质量、惯性矩、翼载、推力等。
还要设置环境参数,如风速、温度、湿度等。
这些参数的设置将直接影响到仿真结果的准确性。
4.仿真流程的设计(1)初始化:设置仿真起始时间、仿真步长等。
(2)输入:设置无人机的初始状态、控制指令等。
(3)仿真:根据动力学模型、控制模型等,计算无人机的状态变化。
(4)输出:记录无人机的状态数据,用于后续分析。
(5)终止:判断仿真是否达到预设的终止条件。
5.仿真结果的分析仿真结束后,我们要对仿真结果进行分析。
这包括无人机的飞行轨迹、稳定性、控制性能等方面。
通过分析仿真结果,我们可以发现无人机系统存在的问题,并进行优化。
基于PID控制的多用途无人机模拟器的设计
技术方案Technology Scheme数据通信2020.616基于PID控制的多用途无人机模拟器的设计白金凤金正焕金湜(韩国世明大学信息通信学院世明大学27136)摘要:目前的无人机模拟器是在无人机重量确定的情况下设计的,很容易地检验其飞行稳定性或控制功能。
但是无人机主要分为两种类型:重量固定型和重量可变型。
重量固定型无人机在飞行期间重量固定,例如竞赛用无人机或无人机上搭载重量固定的摄像头。
重量可变型无人机在飞行期间尽管机身重量固定,但是无人机上搭载的重量是变化的,例如用于喷洒农药的无人机。
本文设计了基于PID控制的多用途无人机模拟器,既可以对重量固定型无人机进行设定,也可以对重量可变型无人机进行设定。
首先在Simulink平台上建立模型,通过改变无人机的重量进行实验,然后在Cleanflight平台上进行实验,并与重量固定型无人机进行了比较。
实验结果表明,重量可变型无人机在飞行的稳定性和控制方面均达到了最优状态。
关键词:多用途无人机;模拟器;Simulink0引言无人机是随着通信技术的发展而发展起来的。
无人机灵活性高,应用于侦察、跟踪和定位等[1]。
目前设定无人机的代表性模拟软件是Cleanflight和Betaflight,可以对重量固定的无人机进行优化,但是当用途改变时,需更换电子调速器和电机,然后再根据配件重新设定。
对于重量可变型无人机却不可设定[2]。
农业用无人机在农药喷洒前、中、后过程中的重量一直变化,设置非常复杂。
因此,本论文设计了基于PID控制的多用途无人机模拟器,通过动力学方程及无人机重量分析电机的最佳性能,既可以对重量固定型无人机进行设定,也可以对重量可变型无人机进行设定。
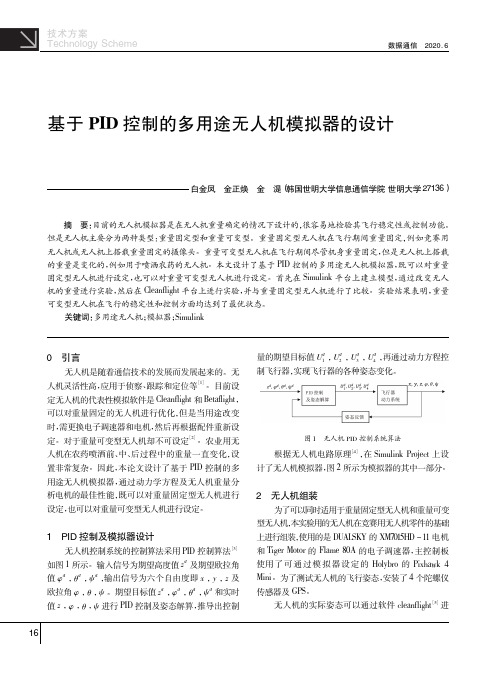
1PID控制及模拟器设计无人机控制系统的控制算法采用PID控制算法[3]如图1所示。
输入信号为期望高度值z d及期望欧拉角值φd,θd,ψd,输出信号为六个自由度即x,y,z及欧拉角φ,θ,ψ。
期望目标值z d,φd,θd,ψd和实时值z,φ,θ,ψ进行PID控制及姿态解算,推导出控制量的期望目标值U d1,U d2,U d3,U d4,再通过动力方程控制飞行器,实现飞行器的各种姿态变化。
基于STM32的四旋翼飞行器控制系统设计
基于STM32的四旋翼飞行器控制系统设计引言:四旋翼无人机近年来逐渐走向商业化和日常生活化,广泛应用于航拍、货运、农业等领域。
为了保证飞行器的平稳、安全飞行,需要设计一个可靠的控制系统。
本文基于STM32单片机,设计了一种适用于四旋翼飞行器的控制系统。
一、硬件设计1.主控板主控板采用STM32单片机,该单片机具有高性能、低功耗、强大的控制能力等优势。
它能够完成飞行器的数据处理、控制输出等任务。
2.传感器为了获取飞行器的姿态信息,需要使用加速度传感器和陀螺仪。
加速度传感器用于测量飞行器的加速度,陀螺仪用于测量飞行器的角速度。
这些传感器通常被集成在一块模块上,直接连接到主控板。
3.遥控器为了实现飞行器的遥控操作,需要使用遥控器。
遥控器通过无线通信与主控板进行数据传输,控制飞行器的起降、悬停、转向等操作。
4.电源管理飞行器控制系统需要提供可靠的电源供电。
因此,需要设计一个电源管理模块,包括锂电池、电池充电管理电路和电源开关等。
二、软件设计1.姿态估计通过加速度计和陀螺仪的数据,使用滤波算法(如卡尔曼滤波)对飞行器的姿态进行估计。
根据姿态的估计结果,可以计算出飞行器的控制输出。
2.控制算法针对四旋翼飞行器,常用的控制算法有PID控制算法和模糊控制算法。
PID控制算法通过比较飞行器的期望姿态和实际姿态,计算出相应的控制输出。
模糊控制算法可以根据模糊规则和模糊集合来计算出控制输出。
3.通信模块为了实现与遥控器之间的无线通信,需要使用无线通信模块,例如蓝牙模块或者无线射频模块。
通过与遥控器进行数据传输,可以实现遥控操作,并接收遥控器发送的命令。
三、控制流程1.初始化飞行器启动时,首先进行传感器的初始化,包括加速度传感器和陀螺仪的初始化。
然后进行电源管理的初始化,确保电源供电正常。
2.传感器数据采集通过传感器采集飞行器的姿态数据,包括加速度和角速度。
3.姿态估计根据传感器采集的数据,使用滤波算法对飞行器的姿态进行估计。
模拟飞行无人机教学设计
模拟飞行无人机教学设计在当今无人机技术日益发展的背景下,模拟飞行无人机教学设计成为了许多学校和机构重要的教学内容。
通过模拟飞行无人机教学设计,学生可以在虚拟环境中进行机载设备控制、飞行器操作和实际情况模拟,从而提高其对飞行无人机技术的理解和应用能力。
一、教学目标1. 了解飞行无人机的基本原理和技术;2. 掌握飞行无人机的操作方法和飞行技巧;3. 理解飞行无人机的应用领域和相关政策法规;4. 提高学生在无人机相关工作和研究中的实践能力。
二、教学内容1. 飞行无人机的基本知识通过模拟飞行无人机教学设计,学生将学习无人机的基本结构、工作原理和飞行原理,在虚拟环境中对飞行无人机进行分析和解剖,深入了解无人机的技术特点和发展趋势。
2. 飞行无人机的操作训练在模拟飞行无人机教学设计中,学生将进行飞行无人机的操作训练,包括遥控器操作、飞行路径规划、机载设备操作等。
学生可以在虚拟环境中模拟各种空中作业场景,如飞行、拍摄、搜救等,通过操作训练提高他们的技术熟练度和应对突发情况的能力。
3. 飞行无人机的应用案例研究通过模拟飞行无人机教学设计,学生将了解各种不同领域中飞行无人机的应用案例,如农业植保、资源勘测、环境监测等。
学生将分析这些应用案例的需求和技术特点,了解无人机在实际应用中的价值和潜力,培养学生的创新思维和跨学科能力。
4. 飞行无人机的政策法规学习无人机飞行相关的政策法规是学生进行操作和应用无人机的基础,通过模拟飞行无人机教学设计,学生将了解无人机的法律法规、飞行限制区域和安全管理要求等内容,掌握合法、安全地操作无人机的基本要求。
三、教学方法1. 模拟实验模拟飞行无人机教学设计可以通过虚拟现实技术和无人机模拟器等工具进行模拟实验。
学生可以在虚拟环境中进行各种飞行操作和应用场景的模拟,提供真实的飞行体验,降低实际操作风险,保护环境和人身安全。
2. 实践训练模拟飞行无人机教学设计应结合实际训练环境进行实践训练,在开放的场地中使用真实的飞行无人机设备进行操作。
无人机飞行控制系统设计
无人机飞行控制系统设计第一章:引言无人机越来越被广泛应用于航拍、矿区勘查、农业喷洒、灾害救援等方面,随着应用范围和需求的不断扩大,对无人机飞行控制系统的性能和精度也有了更高的要求。
无人机飞行控制系统设计的一个核心问题是掌控飞行驾驶思路,让无人机如同飞机一样,能够起飞、复位、巡航、避险、着陆等。
在设计过程中,需要考虑飞机的物理规律、飞行环境、能源供给等多方面的因素。
第二章:无人机飞行控制系统结构分析无人机飞行主要由飞行控制电子板、ATmega328微控制器、直流无刷电机、电池、无人机结构组成,它们协同配合完成飞机的飞行操作。
飞行控制电子板一般由飞行控制面板、机械调节颗粒、陀螺仪和加速度计等组成,这些元器件通过高速的通讯系统实现各个部件之间的协调工作。
在无人机的控制设计过程中,需要对各个结构模块的性质和功能进行详细分析,从而对系统的设计进行优化、完善。
第三章:无人机飞行控制系统设计思路飞行控制系统的设计,需要首先确定飞机的基本架构和构造,同时合理选择电子元件及其附加的软件环境。
其次,在设计时要考虑到多方面的环境因素,例如飞机的气压、温度、重量、形状等因素。
最后,还要对整个系统进行系统化的整合和优化调整,让整个系统更为完善并最终保持稳定的工作状态。
第四章:无人机飞行控制系统关键技术1.自主控制技术:利用无人机自行识别并避免危险障碍、自主规避和自动调整飞行参数等自主控制手段;2.自适应控制技术:对非线性和时变因素进行动态弥补,使系统性能在各种复杂环境下保持稳定、高效;3.多传感器融合技术:通过多传感器协同配合,从几个方面对无人机进行监测和控制,形成更为广阔的就算视野和全方位的信息分析;4.全局导航定位技术:通过采集无人机周围的各种信息,对其定位、导航和跟踪整个飞行轨迹,并做出相应的调整等。
第五章:无人机飞行控制系统研发现状与趋势当前的无人机飞行控制系统正在不断发展中,无人机业务也在不断推广和升级,同时还面临不少的挑战。
基于深度强化学习的无人机飞行控制系统设计与优化
基于深度强化学习的无人机飞行控制系统设计与优化随着无人机技术的不断发展和普及,越来越多的应用场景涌现出来。
在农业、环保、物流、安全等领域,无人机已经成为一种不可替代的工具。
但是,无人机的飞行控制系统设计和优化一直是一个重要的研究方向。
基于深度强化学习的无人机飞行控制系统正是一种有效的解决方案。
1. 强化学习在无人机飞行控制中的应用强化学习是一种机器学习方法,通过智能体与环境的交互来学习最优策略。
在无人机飞行控制中,强化学习可以通过智能体与环境的交互,学习无人机飞行控制的最优策略。
具体来说,在无人机飞行控制中,强化学习可以应用在以下几个方面:(1)路径规划:利用强化学习可以实现无人机路径规划的自动化,从而提高无人机的飞行效率和精度。
(2)姿态控制:强化学习可以实现无人机姿态控制的自动化,从而提高无人机的飞行稳定性和可靠性。
(3)动力控制:强化学习可以实现无人机动力控制的自动化,从而提高无人机的飞行效率和能耗效率。
2. 基于深度强化学习的无人机飞行控制系统设计在基于深度强化学习的无人机飞行控制系统设计中,需要考虑以下几个方面:(1)状态表示:状态表示是指如何将无人机的状态信息转化为可输入到深度神经网络中的形式。
常见的状态表示方法包括传统的向量表示和图像表示。
(2)深度神经网络设计:深度神经网络设计是指如何设计能够对无人机状态进行分析和决策的神经网络模型。
常见的神经网络模型包括卷积神经网络、循环神经网络和深度强化学习等。
(3)奖励设计:奖励设计是指如何设置奖励函数,以指导智能体学习最优策略。
在无人机飞行控制中,奖励函数可以设置为无人机飞行速度、稳定性、消耗能量等指标的组合。
(4)学习算法:学习算法是指如何使用强化学习算法,实现无人机飞行控制的自动化。
常用的学习算法包括Q-learning、Deep Q-Network(DQN)等。
3. 基于深度强化学习的无人机飞行控制系统优化在基于深度强化学习的无人机飞行控制系统优化中,需要考虑以下几个方面:(1)样本利用:样本利用是指如何充分利用已有的经验数据,在不影响模型学习效果的前提下,提高系统的飞行效率和准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
遥控遥地面检着陆架液压电源前轮转
善
收稿且期:2005—07—14;修回目期:2005一08—27。 作者简介:欧干良(1976一),男,湖北黄冈人,硕士研究生,主要从事 计算机测试与控制方向的研究。
在无人机的开发过程中,飞行控制系统需要反复设计、改 进与优化,才能达到预期目标。另外,无人机系统需要多次联 机调试才能验证其整体功能,在联试过程中,一旦飞行控制系 统出现故障,就会使全机联试工作中断,影响研制进度。因 此,我们设计了一种基于工业控制计算机的无人机飞行控制系 统模拟器,不仅能够真实模拟飞行控制系统的所有功能、动态 特性、输入输出信号及电气物理特性,还能通过实时仿真模拟 无人机的动态飞行,从而满足飞行控制系统设计与验证要求, 可在全机系统联试中代替真实飞行控制系统,极大的提高了研 发效率。
1 设计原理
飞行控制系统模拟器的主要功能就是在特定条件下等效真 实飞行控制系统,而无人机飞行控制系统以飞行控制计算机为 核心,与各种传感器及执行结构共同构成闭环控制系统,并且
与其它子系统之间存在复杂的接口关系[3]。飞行控制系统模拟 器要达到模拟飞行控制系统的目的,必须在总体功能上涵盖这 几大部分。在对飞行控制系统的设计验证以及支持无人机的系 统联试中,要求模拟器系统不仅能够完成飞行控制系统功能, 还要能够连续不断地实时模拟飞机的位置、姿态、速度、加速 度以及飞行环境参数,并复现在飞行控制系统作用下控制舵面 的偏转和飞机的响应,从而可以模拟、验证各种状态下的飞行 控制功能。由于传感器理论输出信号可根据无人机动力学和运 动学模型的输出解算出来,为此考虑引进飞机模型,使飞行控 制系统与飞机模型构成全数字闭合回路,这样既能仿真无人机 的实时飞行,又简化了传感器和执行机构的模拟。根据以上设 计思想,飞行控制系统模拟器构成原理如图1所示。
图2模拟器硬件结构图
(1)工业控制计算机:除选择高性能、数据处理能力强的 CPU外,总线结构也是要考虑的因素。由于计算机与外设通 信处理数据量较大,因此选择的接口板卡全部为PCI总线结 构。系统中工控机需要实时计算无人机飞行特性数学模型,实 时解算传感器输出信息,进行飞行控制律解算,从而完成无人 机内、外回路的控制、制导与导航,模拟飞行控制计算机的各 种功能。
众所周知,Windows系统以其界面友好、美观、易操作 性,吸引着广大用户。因此,这里在Windows2000操作系统 下,以Visual C++6.0为开发工具进行系统软件开发。Visu- al C++6.0是迄今为止最成功的Windows下的C++开发平 台之一,集成了微软基础类库(MFC),具有良好封装性、继 承性、多态性[4]。系统开发中,充分利用了VC中所提供的大 量窗口、控件类及其相应的操作与属性,通过AppWizard、 ClassWizard等可视化向导来自动生成所需要的程序框架和其 他一些程序元素,提高了编程效率。本系统软件要实现的功能 比较复杂,为了提高系统的可维护性、可扩展性,采用模块化 设计思想曲]。根据实现功能软件划分为以下几大模块:
第3期
欧于良,等:无人机飞行控制系统模拟器设计
· 34l ·
态,用户可以根据需要选择飞行控制阶段和显示各种数据页 面,进行实事控制和监视。
以上各模块是系统功能实现的重要组成部分,但各模块问 不是独立的,而是存在着复杂的联系,有着复杂的数据调用。 它们的数据交互关系如图3所示。
在软件编程中用到了几个数学算法,列举如下: (1)龙格一库塔法(Runge—Kutte):四阶龙格一库塔公 式是离线仿真中常用的微分方程算法,本程序在函数rk4() 中实现,用于解算飞机12阶微分方程,形成飞行状态值。该 仿真算法的函数如下: double*CFly::rk4(double t,double*x,double*U, double dt)//入口参数:t当前时间;x当前状态值;u当前控 制量;dt步长//出口参数:12个独立状态值
(4)PCI一7432卡:完成开关量输入/输出,输入/输出通 道各有32路;输入电压为0~24VDC,其中逻辑“高”为3-- 24V,逻辑“低”为0~2.4V;输出电压最低5V,最高可达
35V。
(5)C218Turbo卡:完成串行通信功能;内置RISC— based处理器,可减少主机CPU负担;提供大量的I/0内存; 8个串口可同时传输数据传输速率快,速度可达230.4Kbps。
关键诃:无人机;工控机;飞行控制系统;实时仿真;模拟器
Design of Flight Control System Simulator for Unmanned Aerial Vehicle
0U Ganliang,Chen Xin (College of Automation Engineering,Nanjing University of Aeronautics and Astronautics,Nanjing 210016,China) Abstract:A flight control system simulator based on industrial personal computer(IPC)for unmanned aerial vehicle(UAV)is put for— ward.The design principle of this system is introduced in detail,and the scheme of hardware realization is showed,the module functions and flowchart of software are also given,the test result is analyzed in the end.Using computer technique,automation control technique,system simulation technique and object oriented programming(OOP)technique,this simulator is versatile with characteristics of powerful function, friendly interface and convenient operation.It can be used for system early design and verification,or for the later test and maintenance of UAV.The actual application shows that the system has good performances and the requirements of real~time simulation experimentation used for replacing the real flight control system. Key words:unmanned aerial vehicle;industrial personal computer;flight control system;real—time simulation;simulator
文章编号:1671—4598(z0061 03—0339—04
中圈分类号:TP337;V249
文献标识褐:B
无人机飞行控制系统模拟器设计
欧干良,陈 欣
(南京航空航天大学自动化学院,江苏南京 210016)
摘要:提出了一种基于工业控制计算机开发的某型无人机飞行控制系统模拟器设计;详细介绍了系统设计原理,给出了硬件构成方 案、软件功能模块组成和程序流程图,最后分析了测试结果;该模拟器充分利用了当前计算机技术、自动控制技术、系统实时仿真技术 和面向对象编程技术,具有功能强大、界面友好、操作灵活的特点,可用于无人机系统先期设计验证或后期测试维护;实际使用情况表 明该系统性能良好,完全能够代替真实飞行控制系统进行实时仿真试验。
(2)PCI一9114 A/D卡:进行模拟信号采集,支持32通 道单端或16通道差动输入,分辨率16位;最大±35V的输入 电压保护;可编程增益,具有软件触发与定时器触发等多种触 发模式。
(3)PcI一6216 A/D卡:用于模拟信号输出,共有16通 道模拟量输出,分辨率为16位;输出范围为±lo V。
(3)输入/输出模块:与配置的各种输入/输出接口卡进行 结合,负责完成飞行控制功能模块与外围设备的数据交换,实 时接收外围设备的数据输入,数据格式变换;将相关数据转化 为相应格式,实时输出。
(4)定时模块:定时模块由定时器卡和定时软件共同作
图3软件模块数据交互关系图
c枣嚣1酶辈_l啦测-壮 万壤e辜t方潮e缸数据
(6)P10一D64卡:系统内部定时器,作为系统实时时钟, 具有6路定时器/计数器通道;另外板上具有4个时钟源,分 别为2M,1M,500K和250K,用户可以从焊脚上引用时钟源。 本系统主要利用其定时中断功能。
(7)接口转换箱:集中了所有的硬件输入/输出通道,严 格按照真实飞行控制系统的接口要求,对各种信号统一分配, 并进行输入输出驱动、电气和物理转换,形成无人机系统所需 的标准接口。 3 软件设计
(4)串口信号5路,均为RS422接口,分别为飞行控制 系统与遥控遥测系统、地面检测系统、机载参数记录系统、电 气系统控制计算机和状态监控计算机的接口信号。根据信号的 种类、标准和数量,系统应分别配置相应的A/D接口卡、D/ A接口卡、DI/DO(开关量信号输入输出)接口卡,多串口 卡,以及用作系统定时功能的定时器卡。综合以上考虑,系统 硬件配置及结构如图2所示。其中各部分基本特性简介如下:
开始
i
取当前状态剜
●
取当前控删
●
调用飞机方程 解算子0E程
●
存状态量l