7姿轨控分系统设计1
7系统关联与解耦控制1
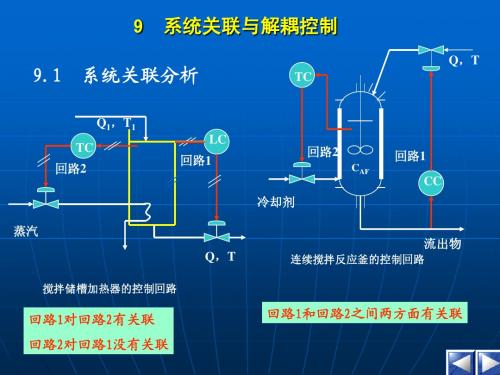
被控变量Q、P1
操纵变量μ1 、μ2
Q 2 第 一 放 大 倍 数 为 : ( ) 2 ( p0 p 2 ) 1 2 1
2
,即各相对增益阵均在 Q 2 1之间。 ①由于 p >p >p 0到 第二放大倍 为 : p0 p1 ( )( p0 p2 ) 0数1 2 1 2 1 p ②如何根据相对增益阵选择合理的变量配对,取 2 则相对 增 益 决于(p0-p (p1-p 11 1)和 Q 2)的大小,应用压降较大的 1 2 阀门去控制流量较好。 p p
U1 Y1 Y2
相对增益阵
U2 K 12 K 22
K 11 K 21
因Kij具有不同的因次 不能用于变量配对
y1 u1 11 y1 u1
u2
U1 Y1 Y2
U2
11 21
12 22
y2
K11 K11
找出
第一放大倍数:在其它控制量 ur (r≠j)均不变 的前提下, uj 对yi 的开环增益。 第二放大倍数:在利用控制回路使其它被控量 yr (r≠i) 均不变的前提下, uj 对yi 的开环增 益。
G11( s )Gc1( s ) Y 1( s ) R1( s ) 1 G11( s )Gc1( s ) G 22( s )Gc 2( s ) Y 2( s ) R 2( s ) 1 G 22( s )Gc 2( s )
闭环特征方程:
1 G11( s)Gc1( s) 0 1 G 22( s)Gc 2( s) 0
R1
- E1
+
Gc1
U1
G11
G21
+ +
嫦娥一号卫星的地月转移变轨控制
空间控制技术与应用Aerospace Con tro l and Applicati o n 第34卷 第1期2008年2月嫦娥一号卫星的地月转移变轨控制宗 红,王淑一,韩 冬,王大轶,李铁寿,张洪华,黄江川(北京控制工程研究所,北京100080)摘 要:文章阐述了嫦娥一号卫星地月转移阶段(从星箭分离到进入使命轨道)的高可靠、高精度自主变轨控制方案,介绍了飞行轨道、轨控策略及控制参数优化、星上自主变轨控制的系统设计和相关参数的地面标定等,给出了在轨飞行试验的验证结果。
关键词:嫦娥一号卫星;地月转移;轨道控制;自主变轨控制中图分类号:V446 1;V448.22 文献标识码:A 文章编号:1674 1579(2008)01 0044 07O rbitM aneuver C on tro l duri ng C isl unar T ransfer Phase for CE 1SpacecraftZ ONG H ong ,WANG Shuy,i HAN Dong ,WANG Day ,i LI T ieshou ,Z HANG H onghua ,HUANG Ji a ngchuan(B eijing Instit u te of Control Engineering,B eijing 100080,China )Abst ract :A high l y re liab le and accura te on board contro l syste m design sche m e is presented for the or b it m aneuvers o f CE 1spacecraft duri n g its cisl u nar transfer phase .F li g ht trajectories ,or b it transferstrateg i e s and para m eter opti m ization ,on board autono m ous m aneuver control procedures and para m eter cali b erations are addressed.Flight verification resu lts are g i v en as w e l.lK eyw ords :CE 1spacecraf;t cisl u nar transfer ;orbit contro;l autono m ous or b it m aneuver收稿日期:2007 12 11作者简介:宗红(1971-),女,北京人,高级工程师,主要从事飞行器制导导航控制的研究工作(e ma i :l zongh @bice .org .cn)。
城市轨道交通通信信号系统

上海地铁采用的ATC制式 共有五种制式
不同的ATC系统向列车传送的控制信号
上海地铁一号线建于80年代末,当时模拟技术占主导地位,选用了基于模拟音频无绝缘轨道电路的ATC系统,其信息量小且是不连续的。 上海地铁二号线建设时,数字技术走向成熟应用阶段,选择了基于数字编码轨道电路的ATC系统,控制中心向列车连续发送“目标速度”。 上海地铁三号线的ATC系统,向列车传送的信息内容是“进路地图”的“目标距离”,由车载计算机自己决定运行速度。 由于其运量及其车辆性能等原因,上海地铁五号线采用点式ATC系统。
01
02
7-1 城市轨道交通ATC系统的特点
传统信号系统是通过设置在地面的色灯信号机来传递不同的行车命令,这种制式基本上是依赖司机进行速度控制和调整,依靠司机保证行车安全。
ATC系统将机车信号作为主体信号,传递给列车的信号是具体的速度或距离信息,列车按调度人员设置的时刻表,实现自动运行、自动折返、自动调整停站时分,以及运用程序定位实现列车在车站的停车控制。
城市轨道交通信号系统
单击添加副标题
单击此处添加文本具体内容,简明扼要地阐述你的观点
ቤተ መጻሕፍቲ ባይዱ
1、轨道交通信号的作用
确保列车运行的安全,防止追尾和冲突。
提高运行效率。
实现列车运行的自动化。
轨道交通信号的作用
STEP1
STEP2
STEP3
与轨道交通其他设施、系统一样,信号系统也沿用铁路的概念、设施和手段。
城市轨道交通线路短、站间距小、运营密度大、运营线路条件差(隧道、弯道多),不能完全套用铁路信号的概念、设施和手段。
它给行车调度人员显示全线列车的运行状态,监督和记录运行图的执行情况,在列车因故偏离运行图时及时做出反应(提出调整建议或者自动修整运行图)。
七章控制系统综合校正

在一定频率范围内,如取: G1( j)H1( j) 1
则: G j 1
H1( j)
速度反馈和加速度反馈
位置的微分反馈是将位置控制系统中被包围的环节 的速度信号反馈至输入端,故常称速度反馈;如果反馈环
节的传递函数是K1s 2,则称为加速度反馈。
速度反馈在随动系统中使用得极为广泛,而且在改 善快速性的同时,还具有良好的平稳性。
根据上述 M 圆特点,确定增益 K 的步骤如下:
① 画出标准化开环传递函数 G j / K 的乃奎斯特图;
② 由原点作直线,使其与负实轴夹角ψ满足
arcsin 1
Mr ③ 试作一个圆心在负实轴的圆,使得它既相切于
G j / K 的轨迹,又相切于直线 P0 ;
④ 由切点 P 作负实轴的垂线,交负实轴于A点;
复不现能频“率复,现当”频输率入超,过所以M,0,~输出M就表
示复现低频正弦输入信号的带宽,
称为复现带宽,或称为工作带宽;
b—— 闭环截止频率,频率 0~b 的 范围称为系统的闭环带宽。
综合性能指标(误差准则) 1. 误差积分性能指标
误差:et xor t xo t xi t xo t
• 期望对数频率特性的控制器设计
1. 二阶最优模型
一般二阶系统
典型二阶I型系统:
s
as2
K bs
1
典型二阶I型系统的开环传递函数:
G
s
s
Kv
Ts 1
闭环传递函数:
s
G(s) 1 G(s)
s2
Kv T 1 s
Kv
TT
s2
n2 2n s
n2
式中, n
Kv , T
1
2
柔性控制系统中七态控制器的仿真分析

《 业控 制计 算 机 } 0 7年 2 工 20 0卷 第 7期
柔性控制系统中七态控制器的仿真分析
S mua in An lss o e e — t t n r l r i lx be Co t l y t m i lt ay i f S v n — a e Co t l n Fe i l nr S se o s oe o
2 柔性 控 制 系统
卜
I :
按 照 偏 差 是 否参 与控 制 作 用 分 为 刚 性 逻 辑 控 制 系 统 和 柔性
\
逻辑 控 制 系 统 两 种 。 偏差 不 直 接 参 与控 制作 用 则 称 此 类 逻 辑控 制 系统 为 刚 性 逻 辑控 制 系统 。偏 差 直 接 参 与 控 制 作 用 则称 此 类
1 七态 控 制 器
界 零 带 条 件 和 7个 控 制 参 数 的 大 小 。根 据 e和e 别 有 3种 情 分 况 , 其 9种 工 况 进 行 了 合 并 , 出 了如 下 控 制 策 略 。 对 提 系 统运 动 的状 态 , 征 为偏 差 和偏 差 变 化 的 大小 , 相 平 面 表 在 上可 以直接 体 现 , 因此将 相 平 面 引入 控 制器 分 析 之 中 , 图 2 如 。从
文献 [】 出一种新 的控制思 路Βιβλιοθήκη : 1提 根据 偏差与偏差变化 率的
九 种工 作 状 况 采 用 相 应 的 九态 输 出 , 当被 控 对 象 偏 离 设 定 值 时 , 机器 自动 加 一 个 反 方 向作 用 力 ,迫 使 系 统 响应 回 归 到 设定 值 附 近 。这 是 一 种 采用 拟 人 化 的逻 辑 思 维 方 式 对 对 象 进 行 控 制 的 智 能控 制 方 法 。 K 和 K± 用 力 分 析 表 明 , 管 这 几 个 作 用 力 影 对 3 作 尽
基于ARM7的X射线分幅相机的控制系统设计

基于ARM7的X射线分幅相机的控制系统设计【摘要】本文首先介绍了基于ARM7的X射线分幅相机的控制系统设计。
在分析了研究背景、研究目的和研究意义。
接着分析了ARM7处理器和X射线分幅相机的概述。
然后详细讨论了控制系统设计方案,包括硬件设计和软件设计。
最后对设计方案的可行性进行了分析,总结了设计方案的优势和局限,并展望了未来的工作方向。
本文通过对ARM7处理器和X射线分幅相机的深入研究,提出了一种全面而有效的控制系统设计方案,为相关领域的研究和应用提供了有益的参考。
【关键词】ARM7处理器、X射线分幅相机、控制系统设计、硬件设计、软件设计、可行性分析、优势、局限、未来工作展望1. 引言1.1 研究背景本研究旨在结合ARM7处理器和X射线分幅相机,设计一个高效稳定的控制系统,以提高X射线分幅相机的控制精度和性能。
通过对ARM7处理器和X射线分幅相机的概述,以及控制系统的设计方案进行详细分析和研究,本文将探讨如何利用ARM7处理器的优势,结合X射线分幅相机的特点,设计出一个功能强大、稳定可靠的控制系统,为相关领域的研究和应用提供技术支持和参考。
的探讨,将为接下来的正文内容提供必要的基础和背景知识。
1.2 研究目的研究目的是为了设计一种基于ARM7的X射线分幅相机控制系统,以实现对X射线分幅相机的高效控制和数据采集。
通过该控制系统,可以实现对X射线分幅相机的各种功能进行灵活调节和监控,提高X射线成像的准确性和稳定性。
通过控制系统的设计,可以将X射线成像应用于医学、工业检测、安检等领域,为相关领域的研究和实践提供便利。
研究目的还包括设计一种高效的硬件和软件结构,以保证控制系统的稳定性和可靠性。
通过对ARM7处理器和X射线分幅相机的深入了解,并结合控制系统的需求,设计出符合实际应用需求的控制系统方案。
通过该研究,可以为X射线成像技术的发展和应用提供技术支持,推动X射线成像技术在不同领域的广泛应用,促进相关领域的发展和进步。