自动控制原理课件chap8
自动控制原理第8章
3.时间响应
由于线性系统的运动特征与输入的幅值、系
统的初始状态无关,所以通常是在典型输入 函数和零初始条件下进行研究的。而非线性 的时间响应与输入信号的大小和初始条件有 关,幅值不同的同一输入信号,响应曲线的 幅值和形状都会产生显著变化,从而使输出 具有多种不同的形式。
4.可能存在自激振荡现象
饱和特性的数学描述为 x a B y kx x a B x a 3.继电特性 继电特性顾名思义就是继电器所具有的特性,
继电特性有双位特性,如图8-4(a)和(b)所示, 三位特性如图8-4 (c)所示等,图8-4 (b)、(c) 的继电特性还带有滞环。当然,不限于继电 器,其他装置如果具有类似的非线性特性, 我们也称之为继电特性,如电磁阀、施密特 触发器等。继电器的切换特性使用得当可改 善系统的性能。
8.1.3常见非线性特性
一个单输入单输出静态非线性特性的数学描
述为
y f (x)
将非线性特性视为一个环节,环节的输入
为 x ,输出为 y ,按照线性系统中比例环节 的描述,定义非线性环节输出和输入的比值 为等效增益:
y f ( x) k x x
线性系统中比例环节的增益是常值,也就是
3.本质非线性ห้องสมุดไป่ตู้节的存在
自动控制系统中包含的非线性特性可分为非
本质非线性和本质非线性两种。对非本质非 线性系统,应用线性理论是合适的。对本质 非线性系统,不能简单的用线性化方法来解 决问题,因此还需要研究非线性控制系统的 理论。
8.1.2 非线性系统的特征
线性系统的重要特征是可以应用线性叠加原理。而 描述非线性系统运动的数学模型为非线性微分方程, 则不能应用叠加原理。非线性系统的运动具有以下 特点: 1. 稳定性分析复杂 按照平衡状态的定义, 在无外作用且系统输出的各 阶导数等于零时, 系统处于平衡状态。显然, 对于线 性系统只有一个平衡状态c=0, 线性系统在该平衡 状态的稳定性就是线性系统的稳定性, 而且稳定只 取决于系统本身的结构和参数, 与外作用和初始条 件无关。而非线性系统可能存在多个平衡状态, 各 平衡状态可能是稳定的也可能是不稳定的。非线性 系统的稳定性不仅与系统的结构和参数有关, 也与 初始条件以及系统的输入信号的类型和幅值有关。
自动控制原理 胡寿松 第八章 非线性控制系统分析

k ( x b) y c k ( x b)
当x y / k b 当 b x y / k b 当x y / k b
式中, b 为常数,它等于主动轮改变方向时的值。
间隙特性类似于线性系统的滞后环节,但不完全等价,它对控制系统的动 态、稳态特性都不利。
虚线可用动态非线性微分方程来描述 死区特性可能给控制系统带来不利影响,它会使控制的灵敏度下降,稳态 误差加大;
死区特性也可能给控制系统带来有利的影响,有些系统人为引入死区以提 高抗干扰能力。
2. 饱和特性
可以说,任何实际装置都存在饱和特性,因为它们的输出不可能无限增大。 实际的饱和特性一般如图中的点划线所示,为了分析的方便,我们将它用图中 的三段直线来近似,并称之为理想饱和特性。 理想饱和特性的数学描述为:
3. 非线性系统的分析与设计方法
系统分析和设计的目的是通过求取系统的运动形式,以解决稳定性问题为中 心,对系统实施有效的控制。 由于非线性系统形式多样,受数学工具限制,一般情况下难以求得非线性微 分方程的解析解,只能采用工程上适用的近似方法。 本章重点介绍两种方法:(考研) 1)相平面法
2)描述函数法
2) 非线性系统的分类
非本质非线性 :能用小偏差线性化方法进行线性化处理的非线性。 本质非线性 : 不能用小偏差线性化方法解决的非线性。
3)研究非线性控制理论的意义 随着生产和科学技术的发展,对控制系统的性能和精度要求越来越高,建 立在线性化基础上的分析和设计方法已经难以解决高质量的控制问题。 为此,必须针对非线性系统的数学模型,采用非线性控制理论进行研究。 此外,为了改善系统的性能,实现高质量的控制,还必须考虑非线性控制器 的设计。
8-3 相平面法
自动控制原理-第8章非线性控制系统
8非线性控制系统前面几章讨论的均为线性系统的分析和设计方法,然而,对于非线性程度比较严重的系统,不满足小偏差线性化的条件,则只有用非线性系统理论进行分析。
本章主要讨论本质非线性系统,研究其基本特性和一般分析方法。
8.1非线性控制系统概述在物理世界中,理想的线性系统并不存在。
严格来讲,所有的控制系统都是非线性系统。
例如,由电子线路组成的放大元件,会在输出信号超过一定值后出现饱和现象。
当由电动机作为执行元件时,由于摩擦力矩和负载力矩的存在,只有在电枢电压达到一定值的时候,电动机才会转动,存在死区。
实际上,所有的物理元件都具有非线性特性。
如果一个控制系统包含一个或一个以上具有非线性特性的元件,则称这种系统为非线性系统,非线性系统的特性不能由微分方程来描述。
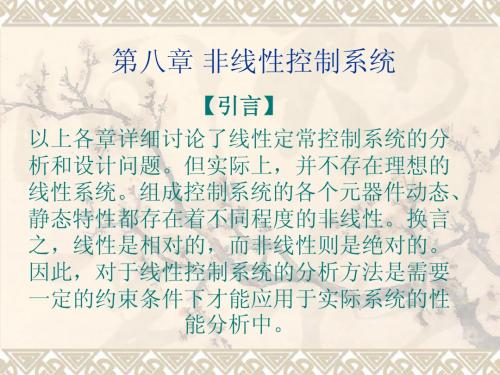
图8-1所示的伺服电机控制特性就是一种非线性特性,图中横坐标u为电机的控制电压,纵坐标为电机的输出转速,如果伺服电动机工作在A1OA2区段,则伺服电机的控制电压与输出转速的关系近似为线性,因此可以把伺服电动机作为线性元件来处理。
但如果电动机的工作区间在B1OB2区段•那么就不能把伺服电动机再作为线性元件来处理,因为其静特性具有明显的非线性。
8.1.1控制系统中的典型非线性特性组成实际控制系统的环节总是在一定程度上带有非线性。
例如,作为放大元件的晶体管放大器,由于它们的组成元件(如晶体管、铁心等)都有一个线性工作范围,超出这个范围,放大器就会出现饱和现象;执行元件例如电动机,总是存在摩擦力矩和负载力矩,因此只有当输入电压达到一定数值时,电动机才会转动,即存在不灵敏区,同时,当输入电压超过一定数值时,由于磁性材料的非线性,电动机的输出转矩会出现饱和;各种传动机构由于机械加工和装配上的缺陷,在传动过程中总存在着间隙,等等。
实际控制系统总是或多或少地存在着非线性因素,所谓线性系统只是在忽略了非线性因素或在一定条件下进行了线性化处理后的理想模型。
常见典型非线性特性有饱和非线性、死区非线性、继电非线性、间隙非线性等。
自动控制原理第8章_非线性控制系统分析

B1 1 3 2 N ( A) A A 2 16
8.2.3 典型非线性特性得描述函数
1.饱和特性的描述函数
X(t) X(t)
kA sin t 0 ω t 1 x(t ) ka b ω t 1 2
X(t)是单值奇函数,所以A1=0
非线性环节的描述函数总是输入信号幅值A的函数, 一般也是频率的函数,因此,描述函数一般记为
N ( A, j )
非线性元件的描述函数或等效幅相频率特性与输入 的正弦振荡的振幅A有关,这是非线性特性本质的反 映。它与线性环节的情况正好相反,线性环节的幅 相特性(频率特性)与正弦输入的幅值无关。
8.2.2描述函数
4 B1 [ kA sint sinω td (ω t ) ka sinω td (ω t )] π
1
e(t)
0
4kA 4ka sin2 d π π
1
2
1
0
4kA 1 1 4ka ( sin 2 1 ) cos 1 2 4
2k a a a A[arcsin( ) 1 ( )2 ] A A A
8.1.4
继电器特性
8.1.4
继电器特性
(t ) 0 m a e(t ) a, e 0 , 0 , (t ) 0 a e ( t ) m a , e x(t ) bsign[e(t )], e(t ) a b , e(t ) m a, e (t ) 0 (t ) 0 b , e(t ) m a, e
(6)气动或液压滑阀的搭接段。 放大器的输出饱和或输出限幅
8.1.3
自动控制原理原理第8章

Bn
1
2
0
y(t ) sin ntdt
An Bn
2
n arctan
An Bn
设非线性特性均为对称奇函数, A0 0 ,忽略高次谐波,则
y(t ) A1 cost B1 sin t Y1 sin(t 1 )
Y1 A1 B1
2 2
1 arctan
2 2
如果非线性元件不包含储能机构,即 N 的特性可以用代数方程 描述,描述函数只是输入正弦信号幅值 X 的函数,即 N N (X ) 而与频率 无关。 描述函数可看作是一个“复放大系数”或“复增益 8.2.2 典型非线性特性的描述函数 非线性特性的描述函数计算步骤: (1)设输入为 x(t ) X sin t,根据非线性输入输出特性,画出其 输出 y (t ) 波形并写出其表达式。
第8章 非线性系统分析
间隙特性对系统性能的影响: (1)间隙会引起系统的不稳定或自振荡。 由于输出总是滞后于输入的,从频率特 性上看相当于系统中引入了一个相位滞后环 节,使系统相位裕量减小,暂态响应振荡性 能加剧。
y
a
K
0 a
x
间隙特性
(2)由于滞后原因间隙会降低系统稳态精度。 继电器特性对系统总是不利的。 4. 继电器特性
x
0
t
不同初始状态下的动态过程
2.自持振荡(自振) 对于非线性系统,除了稳定和不稳定这两种运动状态以外, 还有一种稳定的持续振荡状态,即自持振荡或自激振荡(简称自 振)。
第8章 非线性系统分析
自振就是在没有外加信号时,系统产生的不衰减的周期振荡。 在很多情况下不希望系统产生自振,因为强烈的振荡会使设 备损坏。但有时也可以利用自振改善系统性能,如用高频小振幅 的颤振克服摩擦或间隙对系统的影响。所以自振的分析研究是非 线性系统研究的一个重要问题。 3.叠加原理不适用 非线性系统的暂态特性是与初始条件有关的,当初始偏差小时 单调变化,初始偏差大时很可能就出现振荡。所以,叠加原理不 适用。 鉴于非线性系统的特点,其研究的重点和方法与线性系统有 所不同,一般主要研究非线性系统的稳定性和自振荡问题,决定 它的稳定范围,自振的振幅和频率等。
《自动控制原理》课件

集成化:智能控制技术将更加集 成化,能够实现多种控制技术的 融合和应用。
添加标题
添加标题
添加标题
添加标题
网络化:智能控制技术将更加网 络化,能够实现远程控制和信息 共享。
绿色化:智能控制技术将更加绿 色化,能够实现节能减排和环保 要求。
控制系统的网络化与信息化融合
网络化控制:通过互联网实现远程控制和监控
现代控制理论设计方法
状态空间法:通过建立状态空间模型,进行系统分析和设计 频率响应法:通过分析系统的频率响应特性,进行系统分析和设计 极点配置法:通过配置系统的极点,进行系统分析和设计 线性矩阵不等式法:通过求解线性矩阵不等式,进行系统分析和设计
最优控制理论设计方法
基本概念:最优控制、状态方程、控制方程等 设计步骤:建立模型、求解最优控制问题、设计控制器等 控制策略:线性二次型最优控制、非线性最优控制等 应用领域:航空航天、机器人、汽车电子等
动态性能指标
稳定性:系统在受到扰动后能否恢复到平衡状态 快速性:系统在受到扰动后恢复到平衡状态的速度 准确性:系统在受到扰动后恢复到平衡状态的精度 稳定性:系统在受到扰动后能否保持稳定状态
抗干扰性能指标
稳定性:系统在受到干扰后能够 恢复到原来的状态
准确性:系统在受到干扰后能够 保持原有的精度和准确性
信息化控制:利用大数据、云计算等技术实现智能化控制
融合趋势:网络化与信息化的融合将成为未来控制系统的发展方向 应用领域:工业自动化、智能家居、智能交通等领域都将受益于网络化与 信息化的融合
控制系统的模块化与集成化发展
模块化:将复杂的控制系统分解为多个模块,每个模块负责特定的功能,便于设计和维护 集成化:将多个模块集成为一个整体,提高系统的性能和可靠性 发展趋势:模块化和集成化是未来控制系统发展的重要方向 应用领域:广泛应用于工业自动化、智能家居、智能交通等领域
自动控制原理及应用课件(第八章)
清华大学出版社
董红生主编
第8章 控制系统的MATLAB仿真应用
8.1 MATLAB仿真基础 8.2 MATLAB在控制系统仿真中的应用 8.3 Simulink在控制系统仿真中的应用 8.4 应用实例
本章小结
教学目标:
❖ 了 解 MATLAB 软 件 的 主 要 功 能 及 基 本 使 用 方 法 ; ❖ 掌 握 利 用 MATLAB 软 件 对 自 动 控 制 系 统 进 行 仿
1. MATLAB的主要特点
1)语言简洁紧凑,使用方便灵活;
2)数值算法稳定可靠,库函数丰富 ; 3)程序设计的自由度大,可移植性好; 4)图形功能强大; 5)编程效率高; 6)开放的源程序。
2.MATLAB的操作桌面 1)MATLAB启动 启 动 的 默 认 界 面 如 图 8-1 所 示 , 包 括 三 个 窗 口 : Command Window(命令窗口)、Workspace(工作空间)、Command History(命令历史记录)。
和结果的内存空间,在工作空间中显示了所有变量的名称、大
小、字节数及数据类型,可对变量进行观察、编辑、保存及删
除。有关工作空间的变量管理命令如下。
(1)who/whos:查看工作空间中的变量情况。 (2)clear:删除工作空间所有变量。 (3)size/length:求取变量的大小; (4)exist:查询在当前的工作空间中是否存在一个变量; (5)save/load:将工作空间的变量保存到文件中,或从文件中加载变量。
1)符号运算的基本函数
MATLAB提供了两个基本的符号运算函数,即函数sym和syms , 用来创建符号变量和表达式。
sym函数用于创建单个的符号变量。 调用格式为:
自动控制原理(全套课件)
自动控制原理(全套课件)一、引言自动控制原理是自动化领域的一门重要学科,它主要研究如何利用各种控制方法,使系统在受到扰动时,能够自动地、准确地、快速地恢复到平衡状态。
本课件将详细介绍自动控制的基本概念、控制系统的类型、数学模型、稳定性分析、控制器设计等内容,帮助学员全面掌握自动控制原理的基本理论和方法。
二、控制系统的基本概念1. 自动控制自动控制是指在没有人直接参与的情况下,利用控制器使被控对象按照预定规律运行的过程。
自动控制的核心在于控制器的设计,它能够根据被控对象的运行状态,自动地调整控制量,使系统达到预期的性能指标。
2. 控制系统控制系统是由被控对象、控制器、传感器和执行器等组成的闭环系统。
被控对象是指需要控制的物理过程或设备,控制器负责产生控制信号,传感器用于测量被控对象的运行状态,执行器则根据控制信号对被控对象进行操作。
三、控制系统的类型1. 按控制方式分类(1)开环控制系统:控制器不依赖于被控对象的运行状态,直接产生控制信号。
开环控制系统简单,但抗干扰能力较差。
(2)闭环控制系统:控制器依赖于被控对象的运行状态,通过反馈环节产生控制信号。
闭环控制系统抗干扰能力强,但设计复杂。
2. 按控制信号分类(1)连续控制系统:控制信号是连续变化的,如模拟控制系统。
(2)离散控制系统:控制信号是离散变化的,如数字控制系统。
四、控制系统的数学模型1. 微分方程模型微分方程模型是描述控制系统动态性能的一种数学模型,它反映了系统输入、输出之间的微分关系。
通过求解微分方程,可以得到系统在不同时刻的输出值。
2. 传递函数模型传递函数模型是描述控制系统稳态性能的一种数学模型,它反映了系统输入、输出之间的频率响应关系。
传递函数可以通过拉普拉斯变换得到,它是控制系统分析、设计的重要工具。
五、控制系统的稳定性分析1. 李雅普诺夫稳定性分析:通过构造李雅普诺夫函数,分析系统的稳定性。
2. 根轨迹分析:通过分析系统特征根的轨迹,判断系统的稳定性。
自动控制原理:第八章 非线性控制系统分析(描述函数)
(2)G3(s), s分析系统的稳定性。
【解】
先将系统结构图化为典型结构。
【解法I 】等效变换法 【解法II】特征方程法
G(s) (s)
1
G1 G1
G2G3 G1
1 G1G2G3 N G1
N G1G2G3 1
1 G1
D(s) 1 G1G2G3 N G1 0 G(s) G1G2G3
N( A)G( j) 1
4M
Ke j
1
A j(1 j )(2 j )
4MKe j 3 2 j(2 2 ) A
4 5 2 4 ( arctan 2 2 ) 3
比较模和相角得
K 10 9.93
arctan
1 3
0.322
M 2, h 1
【例6】系统如图,已知
1 G1
【例8】系统如图,说明系统是否自振,并确定使系统稳定的初值
(A)范围。
【解】等效变换求等效G*(s)。
D(s) 1 N ( A) G1(s) G1(s) 0
N ( A) G1(s) 1 G1(s)
N ( A) G1(s) 1 1 G1(s)
G
*(s)
G1 ( s) 1 G1(s)
N
(
A)
8 A2
A2
1
j
8 A2
( A 1)
(1)自振时,调整K使 G(s) 数(A,ω)以及输出振幅Ac。
2 s(s
K
1,) 求 此135时 的K值和自振参
(2)定性分析K增大后自振参数(A,ω)的变化规律。
【解】
8
N ( A) A2
A2 1 j
1 A2 1 j j A 2
N (A) G( j) 1
自动控制原理PPT课件
1.1 控制技术的发展及应用
控制概念的引入:
要求汽车沿道路中心线行驶(控制汽车的位置) 1 )预期:道路中心位置 2 )汽车当前位置相对预期位置的差 3 )操纵方向盘改变汽车位置使差减小
某一装置 代替人
汽车自 动驾驶 系统
1.1 控制技术的发展及应用
ቤተ መጻሕፍቲ ባይዱ
控制概念的引入
•温度调节装置(控制房间的温度)
1 )预期:要求的室内温度
闭环控制
1.3 开环控制和闭环控制
闭环控制
输入 误差
实际输出
控制器 对象
闭环控制
传感器
特点:系统的输出是由偏差控制的,被控量经过反馈影响偏差,产生 一个相应的控制作用去减小或消除偏差,使被控量与期望值趋与一致。
结果:控制结构复杂,成本高;
抗元件参数变化和外界干扰的能力强
闭环系统可能不稳定
1.3 开环控制和闭环控制
2 )室内当前温度相对预期温度的差
温 度
3 )打开或关闭加热开关改变室内温度使差减小
温度测量,比较功 能,自动打开、关 闭加热开关的装置
温度自 动控制 系统
1.1 控制技术的发展及应用
自动控制的概念
自动控制是指在没有人的直接参与的情况下,利用自 动控制装置(控制器)使工作对象(被控对象)自动地 按照预先规定的规律运行,或使它的某些物理量(被控 量)按预定的要求变化。
第一章基本要求及作业
1-1 什么是随动系统?
这类系统的参考量是预先未知的随时间任意变化的函数, 要求被控制量以尽可能小的误差跟随参考量的变化。
系统中:被控对象为指针,被控量为指针位移,输入电压为 给定输入量。
给定电压 电位器
放大器
电动机
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
△
=x ( ω )
△
=y ( ω )
Since x(ω ) − 1+α 2α
2
+ y 2 (ω ) =
1−α 2α
2
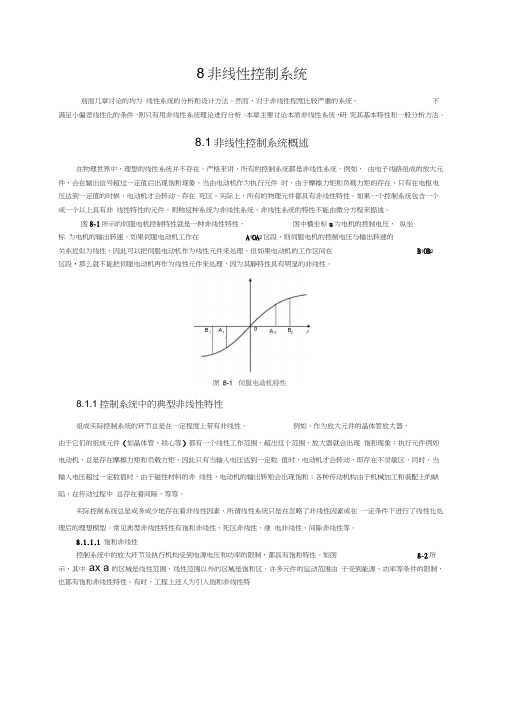
˜ c (jω ), ω ≥ 0, is the semi-circle in the upper half plane centered at 1+α with we see that the Nyquist locus G 2α 1−α the radius 2α , as illustrated in Fig. 8.1. ˜ c (jω ) has a maximum. To determine this maximum, we take the first The Nyquist locus indicates that ∠G ˜ c (jω ) and set it equal to 0, we get derivative of ∠G d (arctan ωT − arctan αωT ) = dω = ⇐⇒ T αT − 2 1 + (ωT ) 1 + (αωT )2 T (1 − α)(1 − αω 2 T 2 ) =0 (1 + (ωT )2 )(1 + (αωT )2 ) 1 ωm = √ . αT
15
10
5
0
−5 −2 10
10
−1
10
0
ωm
10
1
10
2
10
3
40
30
20
θm ωm
10
−1
10
0 −2 10
10
0
10
1
10
2
10
3
Figure 8.2: Bode diagram of a lead compensator
8.2.2
Lead Compensation Techniques Based on Bode Diagrams
The basic idea behind the lead compensation is using the positive phase angle to enhance the magnitude crossover frequency (hence the bandwidth) and the phase margin, so that the transient behavior can be improved. We take a simple example to illustrate this technique. Consider the system shown in Fig. 8.3. The specifications of the compensated system are • the static velocity error constant Kv = 20; • the phase margin γ ≥ 50o , the gain margin Kg ≥ 10dB.
177
178
CHAPTER 8. FREQUENCY-RESPONSE COMPENSATION DESIGN (CHAPTERS 9 AND 10)
2
1.5
Gc(jω)
1
0.5
∠ G(jω)
0
ω=0
+
(1+α)/(2*α)
ω=0−
ω=+∞ ω=−∞
−0.5
−1
−1.5
−2 −0.5
0
0.5
1
1.5
The transfer function of a lead compensator is Gc (s) = Kc α ˜ c (s) = Denote G
T s+1 αT s+1 ,
then from ˜ c (jω ) = arctan ωT − arctan αωT ∠G
˜ c (jω ) > 0 for all ω > 0. To determine the Nyquist locus we decompose G ˜ c (jω ) as it is clear that ∠G
1 jT √αT +1 1 jαT √αT +1
1 = √ >1 α
if we locate ωm at the original magnitude crossover frequency, the magnitude will be enhanced in the vicinity of this frequency so that the crossover frequency of the compensated system is shifted to the right and the phase margin will be again less than the required value. Hence, we make a reservation of 5o for the phase margin. The phase angle to be provided by the compensator is thus θm = 38o . 1−sin θm 1−α Step 3: Determine α. From θm = arcsin 1+ α we get α = 1+sin θm = 0.24.
180
CHAPTER 8. FREQUENCY-RESPONSE COMPENSATION DESIGN (CHAPTERS 9 AND 10)
−110
−120
−130
∠ G1(Байду номын сангаасω)
−140
−150
−160
−170
−180 0 10
10
1
10
2
Figure 8.5: Phase angle curve of G1 (s)
Chapter 8
Frequency-Response Compensation Design (Chapters 9 and 10)
8.1 8.2
8.2.1
Introduction Lead Compensation
Characteristics of a Lead Compensator
Ts + 1 , 0<α<1 αT s + 1
8.2. LEAD COMPENSATION
179
R(s) E (s) −6
Gc (s)
-
4 s(s + 2)
Y (s) -
Figure 8.3: A control system
Step 1: Determine the gain factor of the compensator K = Kc α. With Gc (s) = Kc α the open-loop transfer function is Q(s) = Gc (s)G(s) = Ts + 1 Kc α G(s) αT s + 1
˜ c (jω ) achieves it maximum θm . The Bode diagram of a lead which means that at the frequency ωm ∠G compensator is plotted in Fig. 8.2. Note that ωm is the geometric mean value of the two corner frequencies 1 1 T and αT .
=K K Let us denote G1 (s) = KG(s) = s(0.2 5s+1) . The specification on the static error constant demands 2K = 20, ⇐⇒ K = 10. The log-magnitude versus frequency plot of G1 (s) can be obtained by shifting the 0dB axis of the 10 = 20dB. The magnitude crossover frequency is approximately √ plot of G(s) downward by 20 log ω = 40 = 6.3. Since ∠G(j 6.3) ∼ = −163o , the phase margin is γ ∼ = 17o < 50o . Hence, a phase compensation is needed.
30
20
10
ωm
0
−10
−20
−30
−40
−50 0 10
10
1
10
2
Figure 8.6: Log-magnitude curve of G1 (s) and a lead compensator Step 4: Determine the magnitude crossover frequency ωc . From 1 20 log √ = −10 log α = 6.24dB α and 20 log |G1 (j 9)| = −6.24dB, we choose ωc = ωm = 9/sec. 1 Step 5: Calculate T . From ωm = √αT , we get T =√ Hence 1 = 0.227 αωm
2
2.5
3
3.5
4
4.5