基于C8051F340的陀螺测斜地面系统设计硕士学位论文
随钻陀螺测斜系统设计及测试试验

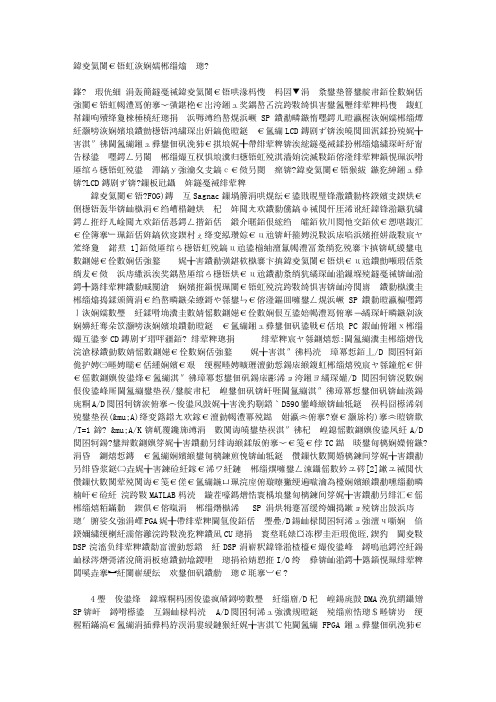
随钻陀螺测斜系统设计及测试试验谢涛;赵少伟;杨保健;幸雪松;贾立新【摘要】通过对光纤陀螺仪、石英挠性加速度计、姿态测量短节、供电短节、泥浆脉冲发生器、地面仪器等关键设备的设计与研制,开发出了一套适合海上作业特点和需求的随钻陀螺测斜系统.室内及现场试验结果表明,自行设计的随钻陀螺测斜系统在大排量钻井环境下能够正常完成井下仪器测斜功能,实时连续提供井筒轨迹数据,测量精度满足异常磁环境下井筒防碰绕障作业要求,地面系统能够完成正常解码,井下仪器结构抗振、耐高温,对钻井环境的适应性强.【期刊名称】《中国海上油气》【年(卷),期】2016(028)003【总页数】6页(P121-126)【关键词】随钻陀螺测斜系统;光纤陀螺仪;石英挠性加速度计;姿态测量短节;供电短节;泥浆脉冲发生器;室内测试;现场测试【作者】谢涛;赵少伟;杨保健;幸雪松;贾立新【作者单位】中海石油(中国)有限公司天津分公司天津300452;中海石油(中国)有限公司天津分公司天津300452;中海石油(中国)有限公司天津分公司天津300452;中海石油(中国)有限公司天津分公司天津300452;中海石油(中国)有限公司天津分公司天津300452【正文语种】中文【中图分类】TE27+1与MWD等磁测量工具相比,随钻陀螺具有异常磁环境下实现井眼轨迹精确测量的优点。
与电缆陀螺工具相比,随钻陀螺在作业过程中的连续随钻测斜功能可使起下钻次数减少,有利于高效实施高密度丛式井防碰绕障。
从目前公开资料及报道可知,仅美国科学钻井公司将陀螺姿态测量产品集成到MWD中,所研制的随钻陀螺测斜系统近年来对中国只提供服务,不进行销售。
本文通过对光纤陀螺仪、石英挠性加速度计、姿态测量短节、供电短节、泥浆脉冲发生器、地面仪器等关键设备的设计与研制,开发出了一套适合海上作业特点和需求的随钻陀螺测斜系统,并进行了室内及现场测试试验,结果表明该系统能与固井质量测量仪器连接,实现固井质量测量及轨迹复测一次完成,可保障海上油田安全作业与降本增效。
光纤陀螺监测系统设计
光纤陀螺监测系统设计摘要:为了监测光纤陀螺在运行过程中因电源电压、电流及陀螺环境温度变化而直接影响其使用精度甚至系统运行出现故障等问题,设计了一种基于DSP的实时自动数字监测系统,将监测到的陀螺运行状态数据通过LCD显示;将采集到的温度信号通过接口电路传递到温控系统;当监测到系统运行异常时可自动关闭系统以达到对陀螺的保护作用。
本系统提高了光纤陀螺的可靠性及安全性。
关键词:光纤陀螺;无缝接口; LCD显示;数字自动监测系统光纤陀螺(FOG)是以Sagnac效应为基础发展起来的新型全固态陀螺仪,是一种无机械转动部件的惯性测量元件,具有无运动和磨损部件、启动快、寿命长、体积小、质量轻、耐冲击、精度高、动态范围大等优越性能,广泛用于军事和民用工业等领域[1]。
光纤陀螺的性能受众多环境因素的影响,供电电压、电流及环境温度的变化是影响光纤陀螺性能的重要因素。
对于这些影响光纤陀螺性能的因素进行有效的监测,有助于系统的故障检测和提高陀螺的使用精度,更重要的是对系统起到了一种实时保护作用。
本文采用基于DSP的数字自动监测电路,分别对电源电压、电流以及环境温度进行实时监测,并且将监测到的数据通过接口电路发送到PC和温控系统以及LCD显示装置。
1 系统设计系统工作原理:通过对系统工作时的电源电压、电流及环境温度信号进行调理、A/D采样、滤波算法、待测值计算算法等处理后得出系统的工作状态。
电压信号通过信号调理电路后可以直接进行A/D采样;电流信号先通过电流/电压转换电路,再通过信号调理电路,最后经A/D采样;温度信号由温度传感器AD590获得,根据流过器件的电流(μA)等于器件所处环境的热力学温度(开尔文)度数:I/T=1即1 μA/K,串联一个电阻将电流信号转换成电压信号,A/D采样后,由电压与温度的关系得到温度值。
NTC热敏电阻测温时,主要原理是通过测得电阻值后,根据热敏电阻阻值与温度的关系转换成温度值,所以,本系统采用四臂电桥法[2]来测量热敏电阻的阻值。
毕业设计论文—基于单片机的直流电机测速、调速及显示系统设计[管理资料]
![毕业设计论文—基于单片机的直流电机测速、调速及显示系统设计[管理资料]](https://img.taocdn.com/s3/m/1f817bd70722192e4436f682.png)
基于单片机的直流电机测速、调速及显示系统设计摘要本文主要研究了利用Quick51系列单片机控制PWM信号从而实现对直流电机转速进行控制的方法。
单片机具有体积小、功能强、成本低、应用面广泛等优点,可以说,智能控制与自动控制的核心就是单片机。
目前,一个学习与应用单片机的高潮在全社会大规模地兴起。
学习单片机的最有效方法就是理论与实践并重,本文用8051单片机自制了一个采用了专门的芯片组成了PWM信号的发生系统,并且对PWM信号的原理、产生方法以及如何通过软件编程对PWM信号占空比进行调节,从而控制其输入信号波形等均作了详细的阐述。
还对直流电机的速度进行了测量和显示。
关键词:单片机、 PWM、调速、测速、显示系统目录摘要 (1)目录 (1)第一章概述 (2)概述 (2)Quick51的技术简介和发展前景 (3)SmartSOPC与Quick51 (3)Quick51特性 (4)第二章总体方案设计 (4)8051单片机简介 (5)PWM信号发生电路设计 (12)PWM的基本原理 (12)128*64液晶显示 (13)第三章硬件设计与连接 (13) (13)信号处理电路设计 (16) (17)I2C总线概述 (17)存储器电路 (18)显示电路设计 (18)PWM信号发生电路设计 (19)第四章软件设计 (20) (20) (21)第五章结论与展望 (30)附录 (31)附一速度控制子程序 (31)附二电路图 (35)参考文献 (35)答辩问题 (36)第一章概述1.1概述本文主要研究了利用Quick51系列单片机,通过PWM方式控制直流电机调速的方法。
冲量相等而形状不同的窄脉冲加在具有惯性的环节上时,其效果基本相同。
PWM控制技术就是以该结论为理论基础,使输出端得到一系列幅值相等而宽度不相等的脉冲,用这些脉冲来代替正弦波或其他所需要的波形。
按一定的规则对各脉冲的宽度进行调制,既可改变逆变电路输出电压的大小,也可改变输出频率。
基于虚拟仪器的MEMS陀螺仪静态性能测试系统设计
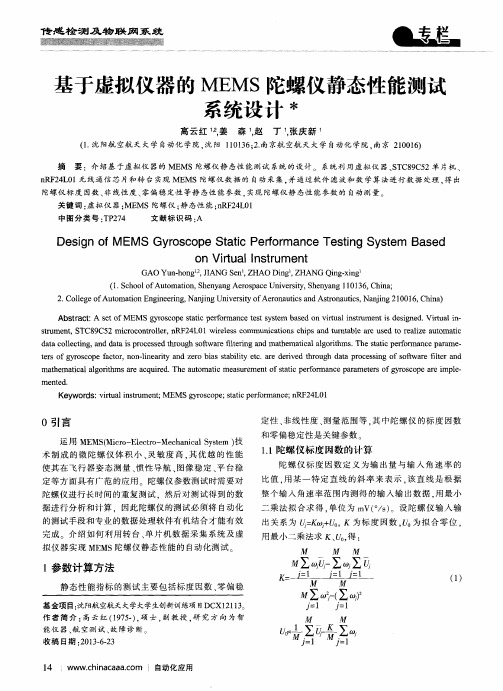
t e r s o f g y r o s c o p e f a c t o r , n o n — l i n e a r i y t a n d z e r o b i a s s t a b i l i t y e t c . a r e d e r i v e d t ro h u g h d a t a p r o c e s s i n g o f s o t f wa r e i f l t e r a n d
嵌入式开发-基于ARM的陀螺仪测控系统的设计与实现

基于ARM的陀螺仪测控系统的设计与实现孙丽萍丁超王永梁(清华大学精密仪器与机械学系北京 100084)摘要:本文设计了基于ARM核的32位微处理芯片S3C44B0X的陀螺仪测控系统,采用µClinux 操作系统,完成了对陀螺仪各项参数的测量、传输、显示、修改和故障报警等功能,实现了对陀螺仪的监测和控制。
关键词:测控系统;ARM;陀螺仪;µClinux中图分类号:TP273+.5文献标识码:BDesign & Realization of measure and control system in gyro based on ARMSUN Li-ping, DING Chao, WANG Yong-liang(Department of Precision Instruments and Mechanology of Tsinghua University,Beijing100084,China)Abstract: A kind of measure and control system in gyro based on 32-bit ARM chip S3C44B0X and µClinux operating system has been designed in this paper. The measure, transfers, display, amending of parameters of gyro, monitoring and alarm function have been accomplished in the design. Through this design, the inspection and control of gyro have been realized.Key words: monitoring system; ARM; gyro; µClinux1 引言嵌入式系统是以嵌入式计算机为技术核心,面向用户、面向产品、面向应用,软硬件可裁的,适用于对功能、可靠性、成本、体积、功耗等综合性能有严格要求的专用计算机系统。
MCU8051 IP core的设计
电子科技大学硕士学位论文MCU8051 IP core的设计姓名:焦原军申请学位级别:硕士专业:微电子学与固体电子学指导教师:罗佳慧20050301摘要本文研究使用VHDL语言设计实现MCU8051功能的软1Pcore。
设计的平台选用Altera公司的开发工具QuartusII40,在开发环境中完成软核的代码设计、综合、布局布线、芯片映射及时序分析,采用ModelSim工具进行功能、时序仿真验证,综合和验证选用Altera公司的Cyclone系列FPGA(FieldProgrammableGateArray)芯片,最终实现与Intelmcs805l功能完全兼容的MCU软核。
文章主要介绍了设计符合Intelmcs5lUser’SMANUL描述的单片机的功能及时序要求的软核。
首先从总体规划的角度介绍了整个系统的内部结构、模块划分及所采用的设计方法和编程风格,然后对各个模块的设计进行了详细的描述,最后给出了综合后的实现结果及测试方法、仿真波形图。
在系统方案设计过程中,仔细考虑了模块的合理划分及各个模块之间协同工作以使设计合理优化,按照自上而下的设计方法将各个模块逐一细化完成本模块的功能,各模块通过端口信号相通信,并根据设计的时序要求产生相应控制信号。
在编写代码时,尽量贴近硬件的实现方式,充分考虑FPGA芯片内部资源的合理开销及VHDL语言的特点,力求做到面积小而速度块,以满足功能和实用性的要求。
采用硬件描述语言设计的电子系统是近年来十分流行的方法,在SoC(SystemOnChip)设计中几乎都会将微处理器、存储单元等通用IP模块集成到FPGA中构成可配置的SoC芯片,无论是微电子集成,还是FPGA的可编程设计,或是单片机的模拟混合集成,目的都是SoC,手段也会逐渐形成基于处理器内核加上外围IP单元的模式。
MCS.51是Intel公司创建的8位机的经典系列结构,并实施技术开放政策,为众多厂家承认,并广泛用于SoC的处理器内核,使这个系列保持着生命力,在未来SoC发展中,作为8位经典结构的8051将担任8位CPU内核的重任。
光纤陀螺测斜仪设计和实验
光纤陀螺测斜仪设计和实验颜廷洋;张春熹;高爽;林铁【期刊名称】《中国惯性技术学报》【年(卷),期】2013(000)002【摘要】为满足复杂油田环境中精确高效井眼测量需要,研制出具有自主知识产权的新型光纤陀螺测斜仪。
利用小型三轴光纤陀螺、石英挠性加速度计和DSP+FPGA 架构导航计算机构建核心硬件平台,设计动态环境捷联解算算法和电缆速度辅助卡尔曼滤波器误差控制算法,实现井斜角和方位角的动态测量。
现场实验结果表明,井斜角误差优于0.1°,方位角误差优于1°。
%A fiber optic gyroscope inertial borehole surveyor(FIBS) with independent intellectual property was successfully developed for accurate and efficient borehole survey applications in complex oilfield environments. Compact three-axis fiber optic gyroscopes, quartz flex accelerometers and embedded navigation computer with DSP+FPGA architecture were utilized as core hardware platform. Modern dynamic strapdown computation algorithm and cable aided indirect Kalman Filter error control algorithm were designed for continuous borehole survey operations. Field experimental results show that the inclination error is less than 0.1° and the azimuth error is less than 1°.【总页数】4页(P179-181,203)【作者】颜廷洋;张春熹;高爽;林铁【作者单位】北京航空航天大学仪器科学与工程学院,北京 100191;北京航空航天大学仪器科学与工程学院,北京 100191;北京航空航天大学仪器科学与工程学院,北京 100191;北京航空航天大学仪器科学与工程学院,北京 100191【正文语种】中文【中图分类】V241.5【相关文献】1.冻结孔测斜用光纤陀螺仪的设计研究 [J], 赵玉明;李长忠2.基于光纤陀螺的无线随钻测斜仪探管软件设计 [J], 李尚泽;杨明;袁辉3.基于光纤陀螺的无线随钻测斜仪探管硬件设计 [J], 李尚泽;杨明;邓昀;蒲朝阳;董新旺;杨雪4.用于光纤陀螺油井测斜仪的光源温控系统设计 [J], 李立京;杨慧;章博;张声艳5.轻小型二位置光纤陀螺测斜仪惯性测量单元设计 [J], 高爽;焦禹舜;林铁;孔庆鹏因版权原因,仅展示原文概要,查看原文内容请购买。
【精选】基于陀螺仪及加速度计信号融合的姿态角度测量_冯智勇 doc资料
基于陀螺仪及加速度计信号融合的姿态角度测量_冯智勇第36卷第4期西南师范大学学报(自然科学版2021年8月Vol 36 N o 4 Journal of Southwest China Normal University(Natural Science EditionA ug 2021 文章编号:1000-5471(202104-0137-05基于陀螺仪及加速度计信号融合的姿态角度测量冯智勇, 曾瀚, 张力, 赵亦欣, 黄伟西南大学计算机与信息科学学院,重庆400715摘要:针对在四旋翼飞行器姿态控制中传感器数据存在噪声干扰和测量误差,以致单独使用陀螺仪与加速度计不能得到最优姿态角度的问题,建立陀螺仪和加速度计误差的数学模型,采用卡尔曼滤波方法,实现数据融合,有效地提高了姿态检测系统的检测精度.该方法被成功应用于四旋翼飞行器的飞行姿态角度控制中,验证了其良好的噪声抑制能力,提高了系统对环境变化的适应性.关键词:传感器融合;卡尔曼滤波;动态角度测量;飞行姿态控制中图分类号:TP274 2文献标志码:A在四旋翼飞行器的飞行控制过程中,准确而实时地获得飞行器在空中的姿态角度,是决定控制精度和系统稳定性的关键.尽管单一MEM S传感器就可以单独进行姿态角度测量,但是其准确性主要取决于惯性器件的精度,单从改善硬件结构设计和工艺方面很难有大幅度的提高,并且系统误差会随时间积累,不适用于长时间载体姿态的确定.所以,使用单一传感器难以得到相对真实的姿态角度.本文出于对姿态角度测量准确性的考虑,采用对多传感器信号进行融合处理的方法,来获得最优姿态角度[1-2].基于多传感器的信息融合是一个非常重要的研究内容,只有采用适宜的融合方法才能达到最好的效果.文献[3]采用的加权平均法是一种简单、直观的融合方法,它将传感器信息进行加权平均的结果作为融合值,适用于动态环境,但运算精度不高.文献[4]采用的神经网络方法,具有良好的非线性和有效的自学习能力,但涉及到参数优化和结构模型的选择问题,其结构过于复杂或简单都会对融合精度产生影响.本文针对由加速度计和陀螺仪建立的姿态角度测量系统,建立其特征模型,采用卡尔曼滤波方法,对来自加速度计和陀螺仪的信号进行融合,解决噪声干扰与姿态最优估计问题,并将此方法应用于四旋翼飞行器的角度测量系统进行验证性试验.1 系统组成本文所采用的姿态角度测控系统主要由加速度计、陀螺仪、微控制器、滤波电路、电机调速器、无刷电机等部分组成.姿态检测系统的硬件平台如图1,由微处理器对陀螺仪、滤波电路和加速度计构成的传感器组进行高速A/D采样后,通过卡尔曼滤波器对传感器数据进行补偿和信息融合,得到准确的姿态角度信号,此角度信号再通过PID控制器运算,输出给电子调速器转换成PWM信号,进而对电机进行控制.收稿日期:2021-06-13项目: 大学生创新性实验计划资助项目(091063533;中央高校基本科研业务费专项资金重点资助项目(100030-2120211002.作者简介:冯智勇(1987-,男,山西人,本科,主要从事自动化专业方面的研究.通信作者:黄伟.图1 系统结构框图加速度计用于测量物体的线性加速度,加速度计的输出值与倾角呈非线性关系,随着倾角的输出进行反正弦函数处理,才能得到其倾角值[5-6].测量数据噪声与带宽的平方根成正比,即噪声会随带宽的增加而增加.V N oise =350ug B w 1 5式中:B w 为传感器带宽(单位为H z.因此在设计卡尔曼滤波器时,首先要确定被测加速度的频率范围,然后再设计滤波器的参数,尽量使滤波器的带宽略高于被测频率,这样不仅有助于滤除高频干扰,而且也有利于降低系统噪声干扰.但是如果要得到精确的倾角值,带宽就需要设置得比较小,而这时加速度计动态响应慢,不适合跟踪动态角度运动,如果期望快速的响应,又会引入较大的噪声.再加上其测量范围的限制,使得单独应用加速度计检测飞行器倾角并不合适,需要与其他传感器共同使用.陀螺仪的作用是用来测量角速度信号,通过对角速度积分,便能得到角度值.陀螺仪本身极易受噪声干扰,微机械陀螺不能承受较大的震动,同时由于温度变化、不稳定力矩等因素,陀螺仪会产生漂移误差,并会随着时间的推移而累加变大,通过积分会使得误差变得很大.因此,也不能单独使用陀螺仪作为本系统的倾角传感器[7].2 卡尔曼滤波融合过程首先建立系统的状态方程和测量方程.由于倾角和倾角角速度存在导数关系,系统倾斜真实角度可以用来做一个状态向量.在该系统中,采用加速度计估计出陀螺仪常值偏差b,以此偏差作为状态向量得到相应的状态方程和观测方程:b =00-1b +10 gyro +w g 0 acce =10b +w a式中, gyr o 为包含固定偏差的陀螺仪输出角速度,a cce 为加速度计经处理后得到的角度值,w g 为陀螺仪测量噪声,w a 为加速度计测量噪声,b 为陀螺仪漂移误差,w g 与w a 相互独立,此处假设二者为满足正态分布的白色噪声,令T s 为系统采样周期,得到离散系统的状态方程和测量方程:X (k=10-Ts 1X (k -1+Ts 0 gyr o (k -1+w g (kTs 0V i (k=10X (k +wa(k同时,要估算k 时刻的实际角度,就必须根据k -1时刻的角度值,再根据预测得到的k 时刻的角度值得到k 时刻的高斯噪声的方差,在此基础之上卡尔曼滤波器进行递归运算直至估算出最优的角度值.在此,须知道系统过程噪声协方差阵Q 以及测量误差的协方差矩阵R,对卡尔曼滤波器进行校正.Q 与R 矩阵的形式如下:Q =q _acce 00q _gy ro R =r _acce 式中,q _acce 和q _gy ro 分别是加速度计和陀螺仪测量的协方差,其数值代表卡尔曼滤波器对其传感器数据的信任程度,值越小,表明信任程度越高.在该系统中陀螺仪的值更为接近准确值,因此取q _gy ro 的值小138西南师范大学学报(自然科学版 ://x bbjb sw u cn 第36卷于q _acce 的值.当前状态:X (k |k -1=AX (k -1|k -1+BU(k(1式中,A =10-Ts 1,B =Ts 0,X (k |k -1是利用k 预测的结果,X (k -1|k -1是k -1时刻的最优结果.则有对应于X (k |k -1的协方差为:P (k |k -1=AP (k -1|k -1A T +Q(2 式中,P(k -1|k -1是X (k -1|k -1对应的协方差,A T 表示A 的转置矩阵,Q 是系统过程的协方差.式子(1、(2即对系统的状态更新.则状态k 的最优化估算值X (k |k:X (k |k=X (k |k -1+K (k(Z(k-H X (k |k -1(3其中H =[1 0],K 为卡尔曼增益(Kalman Gain:K (k=P(k |k -1H T /(H P (k |k -1H T +R(4 此时,我们已经得到了k 状态下最优的估算值X (k |k.但是为了使卡尔曼滤波器不断的运行下去直到找到最优的角度值,我们还要更新k 状态下X (k |k 的协方差:P (k |k=(I -K g (kH P(k |k -1(5其中,I 为单位阵,对于本系统则有,I =11.当系统进入k +1状态时,P(k |k就是式子(2的P(k -1|k -1.(3、(4、(5式为卡尔曼滤波器状态更新方程.计算完时间更新方程和测量更新方程后,再次重复上一次计算得到的后验估计,作为下一次计算的先验估计,这样,周而复始、循环反复地运算下去直至找到最优的结果[8-10].3 实验验证为了验证卡尔曼滤波信号融合方法的有效性,构建验证系统如下:表1 系统实验参数微控制器陀螺仪加速度计实验温度stm32f103zet6enc03mma7260室温27表2 滤波器初始化参数参数名采样周期AB Q R X 0P 0参数值0 02s 1-0020110 0200 01000 005[0 056]000 0050 0050 0050 005 如图2为加入外界干扰,即人为改变测量系统的初始角度时加速度计与陀螺仪输出波形,在外加干扰的情况下陀螺仪能够测量出角速度值,但受噪声影响所测量值不准确且由于波动较大,积分之后误差信号将被放大使得角度值不准确.图3为引入卡尔曼滤波器后的波形曲线,加速度计成功地跟踪出陀螺仪的偏差,滤波输出曲线平滑滤波效果明显,倾角估计的精度得到很大提高.139第4期冯智勇,等:基于陀螺仪及加速度计信号融合的姿态角度测量图2加入外界干扰时加速度计与陀螺仪输出波形图3 引入卡尔曼滤波器后的波形曲线4 结论本文研究了基于卡尔曼滤波的加速度计与陀螺仪的信号融合方法,在动态数据采集试验的基础上,通过卡尔曼滤波有效地补偿传感器漂移与测量噪声等因素对加速度计与陀螺仪的影响,减小了姿态角度测量误差,提高了运算精度,并将该方法成功应用于四旋翼飞行器的姿态测量系统.实验结果表明了该方法的有效性,该方法适用于微小型机器人及飞行器中的姿态角度测量,并有很好的鲁棒性,系统更快速的收敛性将是下一步研究的重点.参考文献:[1]高嵩,潘泉,肖秦琨.多传感器自适应滤波融合算法[J].电子与信息学报,2021,30(8:1901-1904.[2] 金光明,张国良,陈林鹏.M EM S 陀螺仪静态漂移模型与滤波方法研究[J].传感器与微系统,2020,26(11:48-50.[3] 李媛媛,张立峰,多传感器自适应加权融合算法及其应用研究[J].自动化与仪器仪表,2021(2:10-13.[4] 艾海舟,郝放,刘文举.基于人工神经元网络的移动机器人导航研究[J].机器人,1995,17(1:32-35.[5] 朱弋,王振洲,杨舒波.M M A 系列加速度传感器的原理及其应用[J].仪器原理,2021(6:97-98.[6] FR EESCA LE SEM ICON DU CT O R. 1.5~6g T hree Axis Low -g M icro machined A ccelerometer [EB/OL ].(2021-03-140西南师范大学学报(自然科学版 ://x bbjb sw u cn 第36卷79-85.[8] K AL M A N R E.A N ew A ppr oach to L inear Filter ing and Pr ediction P roblems [J].T ransaction o f the ASM E -Jour nal o fBasic Engineer ing,1960,82(3:35-45.[9] 周道兵,骆鹏,肖国强,等.利用K alman 滤波的视频运动目标跟踪[J].西南师范大学学报:自然科学版,2021(6:113-118.[10](美凯.统计信号处理基础:估计与检测理论[M ].北京:电子工业出版社,2020.Angle Measurement Based on Gyroscope andAccelerometer Signal FusionFEN G Zh-i yong, ZEN G H an, ZH A NG Li,ZH AO Y-i xin, H U A NG WeiCollege of Computer and Information Science ,S outhw es t U nivers ity ,Chongqing 400715,ChinaAbstract:For the pro blem that the quadrocopter contr ol using gy roscopes and accelerometers only ex ist no ise interference and measur em ent error,and can not g et the optimal attitude angle.To solve this prob -lem,m athematical model of the gy ro and accelero meter error is built and the collected data is fusioned using the kalm an filter method.This can effectively enhance the pr ecision of the attitude estimation sys -tem.T he metho d is applied in micro pro cessor,in this w ay the autho rs tested the attitude ang le of the quadrocopter.Results show that sy stem noise is w ell reduced using this m ethod and it has go od env iron -m ental adaptability ,w hich prov es the applicability of the metho d.Key words:sig nal fusio n;Kalman filter;dy namic ang le measurement;flig ht attitude contro l责任编辑汤振金 141第4期冯智勇,等:基于陀螺仪及加速度计信号融合的姿态角度测量基于单片机的发动机转速和加速时间测量方法董顺义,杨纪明,李伟( 空军工程大学工程学院推进系统实验室陕西西安 710038)摘要:本文介绍了利用单片机来实现发动机转速测量及加速时间测量的设计思想和实现方法,实测结果表明,该方法不但可以提高了测量精度和测量效率,而且大大提高了测量的客观性,系统对于改进目前的测量手段,提高测量的客观性和精度有很大帮助。
用于光纤陀螺油井测斜仪的光源温控系统设计
p r o c e s s o r , w i t h p u l s e w i d t h m o d u l a t i o n ( P WM)t o d r i v e t h e H —b i r d g e c i r c u i t . A c c o r d i n g t o a n a l y z i n g t h e d y n a m i c t e m p e r a t u r e
Abs t r a c t : r r O a da p t h i g h t e mp e r a t ur e wo r ki n g c o n di t i on o f t he f i b e r o p t i c g y r o s c o pe s i n c l i n o me t e r f o r we l l l o g g i n g. a d i g i t a l
关键 词 : 温度控制 ; T MS 3 2 0 F 2 8 1 2 ; 脉宽调制 ; 光 纤 陀螺 油 井 测 斜 仪 中 图 分类 号 : T P 2 7 3 文献标识码 : A 文章 编 号 : 1 0 0 2—1 8 4 1 ( 2 0 1 3 ) 0 7— 0 0 2 0— 0 3
c h a r a c t e r i s t i c s o f t h e t h e r mo — e l e c t r i c c o o l e r ( T E C ) , t h e ma t h e m a t i c a l m o d e l a n d t h e d i g i t a l P I D c o n t r o l a l g o r i t h m w a s d e s i g n e d t o
基于磁强计和陀螺仪的姿态参数测试系统的设计
基于磁强计和陀螺仪的姿态参数测试系统的设计【摘要】本文设计了一种基于磁强计和陀螺仪的姿态参数测试系统,设计了测试系统的总体框架,硬件电路和壳体,选择了合适的陀螺仪和磁强计,具有体积小,功耗低,稳定性高,抗干扰性强的优点。
通过实验表明,测试系统可以对飞行体的进行姿态测试。
【关键词】测试系统;磁强计;陀螺仪;姿态随着各种高新科技在军事领域内的广泛运用,武器装备的性能有了飞跃性的发展,对弹箭飞行测试也提出了更高的要求[1]。
全弹道飞行姿态、轨迹甚至落点等测试内容变得越来越重要[2]。
以往在武器弹药弹道姿态参数的测试方面主要采用地磁传感器、太阳方位角传感器、高速摄影法等方法获取飞行姿态参数,但由于地磁传感器、太阳方位角传感器易受气候、环境条件及障碍物影响;而高速摄影法时间短、有效作用距离短[3]。
磁传感器不能够独立提供三维姿态信息,存在着局限性,但磁传感器不会随时间累积误差;MEMS陀螺具有小体积、抗高过载、测量精度高及较高量程等优点,但是存在误差积累[4]。
本文将两者组合起来,互相补充来解决测量弹丸滚转角的问题。
利用磁强计、MEMS陀螺进行姿态测量是近年来捷联式低成本、全固态测量系统研究的热点之一[5]。
本文设计了磁强计/陀螺组合的姿态参数测试系统,用于测量旋转弹体的姿态。
1.测试系统的总体设计电路模块是整个测试系统的核心部分,高速动能弹测试系统为了在有限壳体内实现三维地磁信号的测试,整个电路采用了微型化设计,在对电路进行最简设计前提下,使测试系统的元器件数量最少,电路系统功耗最低,使用平面封装IC 器件,小体积电阻、电容器件,有效地减小电路模块的体积。
从而使该测试电路能够适应系统要求的体积,增加测试系统的环境适应性。
测试系统主要由传感器组、适配电路、电源控制器、存储器、主控电路等几部分组成的,陀螺、磁传感器将采集到的信号转换成电压信号。
将传感器的输出电压信号进行放大、滤波等处理,将模拟信号转换成为适合A/D变换器输入的信号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
北京航空航天大学硕士学位论文 1 学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。
作者签名: 日期: 年 月 日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权湖南科技大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。矚慫润厲钐瘗睞枥庑赖。
涉密论文按学校规定处理。
作者签名: 日期: 年 月 日 导师签名: 日期: 年 月 日 第一章 绪论 2 第一章 绪论 1.1课题背景介绍 1.1.1石油测井简介 石油作为现代社会的最重要能源之一,随着现代工业的飞速发展,人类社会对石油的需求量越来越大,人们对石油勘探和采集的投资也在不断增加,随着现代科学技术的发展,用于石油勘探的设备和技术涉及到许多技术和领域,从微电子技术到计算机技术、从机械制造到材料科学、从地质学到地球物理学等学科,几乎无所不包。聞創沟燴鐺險爱氇谴
净。 地球物理测井 (简称“测井”) 技术是伴随石油工业而产生和发展起来的一门学科,属于地球物理学的一个分支。为了寻找石油和天然气,一般要根据地质科学的研究,先在有利于石油和天然气生产和存储的地区进行地质调查和地球物理勘探,找出可能存储石油和天然气的各种地质构造。至于在这些地质构造中是否真的含有石油或天然气,以及石油或天然气的储量是多少,最终都要靠测井来证实。残骛楼諍锩瀨濟溆塹籟。
测井分为勘探测井和生产测井两种,前者为了找石油,了解地层物理结构;后者是在石油开采过程中,为了提高采油效率,测量掌握与采油有关的油井情况 (如井径尺寸、钻井偏斜度等)、地层情况 (如油层深度、油/水比等) [1]。酽锕极額閉镇桧猪訣锥。
1.1.2石油测井的发展历史和现状 测井的发展大致可以分为四个阶段[2]: 第一阶段是模拟记录阶段。从测井诞生到60年代末,都使用模拟记录测井仪器。用灵敏度高的检流计测量回路电流得到探测系统测量端间的电位差变化,反映地层物理参数(电阻率、声波速度等)随深度的变化,记录在照相纸或胶片上,模拟记录的特点是采集的数据量小,传输速率低。使用的主要测井方法有声速(纵波)测井、感应测井和普通电阻率测井,配之以井径测井、自然电位测井和自然伽马测井等。彈贸摄尔霁毙攬砖卤庑。
第二阶段是数字测井阶段。自60年代来,测井仪器从模拟记录过渡到数字记录。这是测井技术发展的要求,测井方法的增多,特别是地层倾角测量的出现和声波变密度测井都要求高速采集地下信号,此外,某些测井方法要求在井场作一些校正、补偿和简单的计算,如中子测井计算中子孔隙度、密度测井进行脊肋校正等。謀荞抟箧飆鐸怼类蒋薔。
第三阶段是数控测井阶段。新测井方法不断出现,如电磁波传播测井,碳/氧(C/O)北京航空航天大学硕士学位论文 3 能谱测井,其下井仪器复杂,为提高精度,须在测井过程中对仪器的某些参数实现“实时”控制和调节 (双侧向测井对屏蔽电流的“实时”调节等),数字测井已经不能满足要求,计算机技术的高速发展提供了解决问题的途径。厦礴恳蹒骈時盡继價骚。
70年代末发展了数控测井仪。数控测井仪实质上是一台以计算机为中心的遥控遥测系统,各种下井仪器作为计算机的外设,通过电缆通讯系统实现数据的交换和计算机对下井仪的控制。仪器检测、测量数据处理和显示、曲线回放等都通过软件实现。测量时,在井下将各种仪器信号变换为数字信号,通过不同的编码—解码技术将信号沿电缆送至地面,输入计算机,这样有利于下井仪的设计和更新,也有利于整个数控测井系统的扩展。茕桢广鳓鯡选块网羈泪。
第四阶段是成像测井阶段。随着勘探和开发更复杂更隐蔽的油气藏的发展,对测井也提出了更高的要求,薄层、薄互层、裂缝性储层低孔隙低渗透层、复杂岩性的评价;高含水油田的开发中剩余油饱和度及其分布的确定;固井质量、套管损坏等工程测井问题及地层压力、非均质和各向异性等问题需要测井从方法理论到测量技术有更新的发展,正是在这样的背景下,测井现在正向成像测井阶段发展。 鹅娅尽損鹌惨歷茏鴛賴。
目前的测井手段仍以数控测井为主。国内的数控测井系统从八十年代开始发展,之前国外石油公司的测井系统一直处于垄断位置,如Mobil石油公司、Shell石油公司和Schlumberger石油公司。胜利-北航钻井测控研究中心自1985年开发石油测井仪器以来,始终以达到国际先进技术水平为目标,制定适合国情的研制方案。相继和胜利油田、滇黔贵石油钻探公司、江汉测井研究院、大庆油田测研所等单位建立了合作关系。在国内率先将单片微处理器及计算机技术应用于石油测井仪器中。已形成从测量油井各种基本物理参数如陀螺测斜仪、多参数测井仪,到具有油井分析系统功能的如碳氧比能谱测井仪等多种类系列测井仪器。这些测井仪器的成功应用打破了外国公司在测井仪器领域的垄断,填补了我国测井仪器行业的空白。籟丛妈羥为贍偾蛏练淨。
1.2课题的来源 1.2.1数控测井系统介绍 数控测井系统通常由三部分组成:上位机、下位机和井下仪器。上位机和下位机主要通过串口、并口或自行开发的总线扩展槽连接,而下位机和井下仪器则通过模拟电缆连接,数控测井系统的结构如图1所示[2, 3]。預頌圣鉉儐歲龈讶骅籴。 第一章 绪论 4 图1 数控测井系统结构 ● 上位机系统主要以工控机(或者便携电脑)为中心,辅助以打印机和示波器等外部
设备。数控测井软件系统的大部分软件也包含于其中。主要完成对下位机系统各个接口的管理和控制功能,并实现对测井数据的处理、显示、存储、打印和回放等功能。渗釤呛俨匀谔鱉调硯錦。
● 下位机系统主要有供电部分、模拟部分和各种测量接口部分等组成。测量接口通过接口控制连接到井下仪器,常用的测井接口有深度测量接口、脉冲计数测量接口、A/D采样测量接口、声波测量接口、碳氧比测量接口、陀螺测斜接口、DDL3组合测井仪测量接口等。铙誅卧泻噦圣骋贶頂廡。
● 井下部分负责采集数据,然后将其传送给下位机系统。井下部分由井下仪、供电系统、电缆切换单元和信号监测四部分组成。常用的井下仪器有声波仪、CCL仪、陀螺测斜仪、碳氧比能谱测井仪和自然伽马仪等。擁締凤袜备訊顎轮烂蔷。
数控测井地面系统大都是大型车载式机柜系统,硬件配置齐全、功能强大、可以和多种井下仪器配套使用、能够满足各种测井作业的需要,但是它的体积庞大,在海上作业或长距离作业时,运输安装极为不便,影响了它的推广使用。特别是面对单一的测井任务,也需要将整个数控测井系统用车拉到现场,浪费了系统资源,也浪费了人力物力。因此地面测井接口的专用化和小型化成为测井行业的趋势和潮流。贓熱俣阃歲匱阊邺镓騷。 北京航空航天大学硕士学位论文 5 1.2.2 陀螺测斜简介 应用在石油测井领域的陀螺测斜仪是20世纪90年代初期才发展起来的一种不受地质和周围环境影响的精确油井导向系统,该系统采用动力调谐式挠性速率陀螺为核心传感器,可测量目标位置的方位,井斜、工具面等工程参数,从而获得油井的空间轨迹,同时也可为定向钻井提供导向信息。此前随钻测量仪、电子多点等测量仪器等测斜系统,考虑到抗震性能要求高,均采用磁通门传感器来感应大地磁场,确定井眼方位。而在套管中由于存在铁磁质材料,大地磁场受到屏蔽或干扰比较大,上述测量仪器确定的方位就不准确了。由陀螺惯性原理可知,即使外界磁干扰很大,陀螺仍能保持原来的方位稳定,因此,陀螺测斜仪也就成为在套管中进行定向测量的必备仪器。坛摶乡囂忏蒌鍥铃氈淚。
陀螺测斜系统分为地面系统和井下系统两部分[4]。其中井下系统就是动调式陀螺测斜仪,它由减震器、惯性体、陀螺电路舱、电源舱、微机舱、磁定位器、马笼头等几部分组成。其结构如图2所示。蜡變黲癟報伥铉锚鈰赘。
图 2 陀螺测斜井下系统 地面系统是一套专用的便携式计算机测控、信号采集系统,它可对井下仪器实时控
制,数据采集和处理,实时显示、打印、存储测井数据,并在测井现场完成测井资料的处理工作,主要由笔记本电脑、测控接口箱、电源、打印机几部分构成。其系统构成如图3所示。買鲷鴯譖昙膚遙闫撷凄。
图 3 陀螺测斜系统结构图 传统的陀螺测斜仪接口一般是由单片机扩展一系列外围器件组成,结构复比较杂,
例如:模拟信号采样需要扩模拟多路选择器、模/数转换器、程控放大器等;与陀螺仪通信部分需要扩展曼彻斯特编解码芯片(如HD15530)或扩展FPGA实现编解码;与工控第一章 绪论 6 机通信部分则需要扩展USB接口芯片(如PDIUSBD12)或其他通信接口芯片。图4为某型号陀螺测斜接口箱结构。綾镝鯛駕櫬鹕踪韦辚糴。
STD总总CPU总总总总总总
总总
A/D总总总总
总总总总总总总总总总总总总总总总总总总总总CCL
RS232总总
总总总总总总总总总总总总总总总总
图 4 接口箱组成结构图 接口箱由STD总线机笼里插入STD总线接口板,CPU板、深度及A/D板、显示驱
动板、通讯板和前面板上的显示板组成。这种结构板卡过多,而且在实际测井工作中也经常出现板卡松动的现象,因此需要把板卡整合在一起,既能减小体积,又能提高可靠性。在电子技术、信息技术和计算机技术高度发达的今天,完全可以在不降低功能和性能甚至功能和性能有所提高的前提下大大简化硬件系统和软件系统。驅踬髏彦浃绥譎饴憂锦。
1.2.3 声波测井简介 50年代出现了声波测井仪器,60年代末提出了偶极子源能直接激发横波信号,可以解决软地层中横波勘探的问题。70年代初提出了可能的横波速度测井仪,70年代末出现了长源距声波全波列测井仪,80年代初研制出电磁驱动的偶极子横波测井仪,80年代中期发展了阵列声波测井仪,将常规井眼补偿声波与长源距声系以及井径等综合测量,实现了对声波全波列的数字化记录,并对管波的纪录予以重视 [6,7,8]。猫虿驢绘燈鮒诛髅
貺庑。 声波探测数控石油测井系统主要应用是在固井后,检查和评价水泥固井的工程质量。采用声幅测量和全波变密度测量两种技术相结合,可以有效的检查套管和地层间水泥环的胶结质量(包括第一胶结面的胶结质量——水泥环和套管的胶结情况,第二胶结面的胶结质量——水泥环和地层间的胶结情况)。同时水泥抗压强度和套管破裂等油管固井工程质量问题都是十分重要的评价内容[9]。锹籁饗迳琐筆襖鸥娅薔。