第4章基于稳态模型的异步电动机调速2-4-118页精品文档
合集下载
基于动态模型的异步电动机调速系统
基于动态模型的异步电动机调速
矢量控制系统通过矢量变换和按转 子磁链定向,得到等效直流电动机 模型,然后模仿直流电动机控制。
直接转矩控制系统利用转矩偏差和 定子磁链幅值偏差的符号,根据当 前定子磁链矢量所在的位置,直接 选取合适的定子电压矢量,实施电 磁转矩和定子磁链的控制。
内容提要
异步电动机动态数学模型的性质 异步电动机三相数学模型 坐标变换 异步电动机在正交坐标系上的动态数学
三相绕组轴线彼此在空间的相位差 2
3
互感
2
Lms cos 3
Lms
cos(
2
3
)
1 2
Lms
定子三相间或转子三相间互感
LAB
LBC
LCA
LBA
LCB
LAC
1 2
Lms
Lab
Lbc
Lca
Lba
Lcb
Lac
1 2
Lms
定、转子绕组间的互感
由于相互间位置的变化可分别表示为
LAa LaA LBb LbB LCc LcC Lms cos
LBa
LBb
LBc
iB
C a
LCA LaA
LCB LaB
LCC LaC
LCa Laa
LCb Lab
LCc Lac
iiCa
b
LbA
LbB
LbC
Lba
Lbb
Lbc
ib
c LcA LcB LcC Lca Lcb Lcc ic
自感
或写成 ψ Li
定子各相自感
电力拖动自动控制系统 —运动控制系 统
第6章
基于动态模型的异 步电动机调速系统
基于动态模型的异步电动机调速
异步电动机机的稳态模型

空载运行时,激磁磁势全部由定子磁势 F1=Fm
提供,即:
负载运行时,转子绕组中有电流I2 流过,产生一个同 步旋转磁势F2,为了保持Fm不变,定子磁势F1除了提 供激磁磁势Fm外,还必须抵消转子磁势F2的影响,即:
异步电动机的磁势平衡方程:
F1 F1 F Fm ( F2 ) Fm
n2+n=sn1+(1-s)n1=n1 结论:转子绕组的磁势与定子绕组的磁势转速相同, 在空间相对静止。
(3)磁势平衡方程式 激磁电流 和激磁磁势
产生主磁通 所需要的电流称为激磁电流 对应的磁势称为激磁磁势:
;
激磁磁势近似不变
由电势方程式: ;电源电压不变,阻抗压降很小,电势近似不变; 由公式: , 近似不变; 可见,激磁磁势和激磁电流几乎不变。
5
符号表
转子侧折算到定子侧
I'2 Ψ'2 E'2 Ф'2σ Ψ'2σ E'2σ Rm Lm1 Lm Xm Im Fm
(一) 异步电动机的工作原理 (二) 异步电动机的等效电路 (三) 异步电动机的功率平衡和转矩平衡关系 (四) 异步电动机的电磁转矩和机械特性 (五) 异步电动机工作特性分析(略)
转子绕组中感应电势的频率:
转子感应电势的有效值
注意转子不动时(s=1)时的感应电势与转子旋转时感应电势的关系。
转子绕组的阻抗
由于转子绕组是闭合的,所以有转子电流流过。同样 会产生漏磁电抗压降。 漏抗公式: 漏抗也与转差率正比。转速越高,漏抗越小。
交流电机变频调速讲座 第5讲 基于稳态模型的异步电动机变压变频调速系统
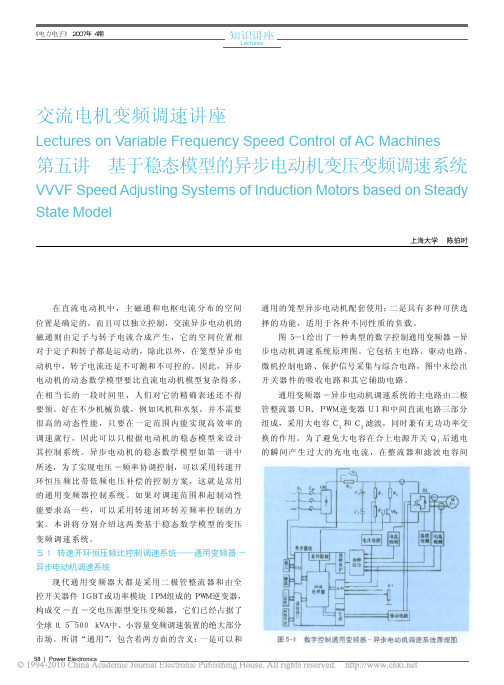
二极管整流器虽然是全波整流装置,但由于其输 出端有滤波电容存在,只有当交流电压幅值超过电容 电压时,才有充电电流流通,交流电压低于电容电压 时,电流便终止,因此输入电流呈脉冲波形,如图 5 - 2 所示。这样的电流波形具有较大的谐波分量,使电源受 到污染。为了抑制谐波电流,对于容量较大的通用变频 器,都应在输入端设有进线电抗器 L m ,有时也可以在 整流器和电容器之间串接直流电抗器。L m 还可用来抑 制电源电压不平衡对变频器的影响。
上海大学 陈伯时
在直流电动机中,主磁通和电枢电流分布的空间 位置是确定的,而且可以独立控制,交流异步电动机的 磁通则由定子与转子电流合成产生,它的空间位置相 对于定子和转子都是运动的,除此以外,在笼型异步电 动机中,转子电流还是不可测和不可控的。因此,异步 电动机的动态数学模型要比直流电动机模型复杂得多, 在相当长的一段时间里,人们对它的精确表述还不得 要领。好在不少机械负载,例如风机和水泵,并不需要 很高的动态性能,只要在一定范围内能实现高效率的 调速就行,因此可以只根据电动机的稳态模型来设计 其控制系统。异步电动机的稳态数学模型如第一讲中 所述,为了实现电压 - 频率协调控制,可以采用转速开 环恒压频比带低频电压补偿的控制方案,这就是常用 的通用变频器控制系统。如果对调速范围和起制动性 能要求高一些,可以采用转速闭环转差频率控制的方 案。本讲将分别介绍这两类基于稳态数学模型的变压 变频调速系统。 5.1 转速开环恒压频比控制调速系统——通用变频器 - 异步电动机调速系统
由于系统本身没有自动限制起制动电流的作用, 因此频率设定必须通过给定积分算法产生平缓的升速 或降速信号,升速和降速的积分时间可以根据负载需 要由操作人员分别选择。
综上所述,通用变频器的基本控制作用如图 5 - 3 所 示。近年来,许多企业不断推出具有更多自动控制功能 的变频器,使产品性能更加完善。
上海大学 陈伯时
在直流电动机中,主磁通和电枢电流分布的空间 位置是确定的,而且可以独立控制,交流异步电动机的 磁通则由定子与转子电流合成产生,它的空间位置相 对于定子和转子都是运动的,除此以外,在笼型异步电 动机中,转子电流还是不可测和不可控的。因此,异步 电动机的动态数学模型要比直流电动机模型复杂得多, 在相当长的一段时间里,人们对它的精确表述还不得 要领。好在不少机械负载,例如风机和水泵,并不需要 很高的动态性能,只要在一定范围内能实现高效率的 调速就行,因此可以只根据电动机的稳态模型来设计 其控制系统。异步电动机的稳态数学模型如第一讲中 所述,为了实现电压 - 频率协调控制,可以采用转速开 环恒压频比带低频电压补偿的控制方案,这就是常用 的通用变频器控制系统。如果对调速范围和起制动性 能要求高一些,可以采用转速闭环转差频率控制的方 案。本讲将分别介绍这两类基于稳态数学模型的变压 变频调速系统。 5.1 转速开环恒压频比控制调速系统——通用变频器 - 异步电动机调速系统
由于系统本身没有自动限制起制动电流的作用, 因此频率设定必须通过给定积分算法产生平缓的升速 或降速信号,升速和降速的积分时间可以根据负载需 要由操作人员分别选择。
综上所述,通用变频器的基本控制作用如图 5 - 3 所 示。近年来,许多企业不断推出具有更多自动控制功能 的变频器,使产品性能更加完善。
第5章 基于稳态模型的异步电动机调速系统

~ Pm
Pmech Ps
即
Pm = Pmech + Ps
Ps = sPm
Pmech = (1 – s) Pm
从能量转换的角度上看,转差功率是否
增大,是消耗掉还是得到回收,是评价调 速系统效率高低的标志。从这点出发,可 以把异步电机的调速系统分成三类 。
1. 转差功率消耗型调速系统
这种类型的全部转差功率都转换成热能 消耗在转子回路中,上述的第①、②、③ 三种调速方法(降压、转差离合器、串电 阻)都属于这一类。在三类异步电机调速 系统中,这类系统的效率最低,而且越到 低速时效率越低,它是以增加转差功率的 消耗来换取转速的降低的。可是这类系统 结构简单,设备成本最低,所以还有一定 的应用价值。
电力拖动自动控制系统
第2篇
交流调速系统
概述
直流电力拖动和交流电力拖动在19世纪先 后诞生。在20世纪上半叶的年代里,鉴于直 流拖动具有优越的调速性能,高性能可调速 拖动都采用直流电机,而约占电力拖动总容 量80%以上的不变速拖动系统则采用交流电 机,这种分工在一段时期内已成为一种举世 公认的格局。交流调速系统的多种方案虽然 早已问世,并已获得实际应用,但其性能却 始终无法与直流调速系统相匹敌。
2.转差功率馈送型调速系统
在这类系统中,除转子铜损外,大部分 转差功率在转子侧通过变流装置馈出或馈 入,转速越低,能馈送的功率越多,上述 第④种调速方法属于这一类。无论是馈出 还是馈入的转差功率,扣除变流装置本身 的损耗后,最终都转化成有用的功率,因 此这类系统的效率较高,但要增加一些设 备。
3. 转差功率不变型调速系统
• 交流拖动控制系统的应用领域
主要有三个方面:
一般性能的节能调速 高性能的交流调速系统和伺服系统 特大容量、极高转速的交流调速
基于稳态模型的异步电动机调速系统212页PPT

46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特
基于稳态模型的异步电动ቤተ መጻሕፍቲ ባይዱ调速系统
11、用道德的示范来造就一个人,显然比用法律来约束他更有价值。—— 希腊
12、法律是无私的,对谁都一视同仁。在每件事上,她都不徇私情。—— 托马斯
13、公正的法律限制不了好的自由,因为好人不会去做法律不允许的事 情。——弗劳德
14、法律是为了保护无辜而制定的。——爱略特 15、像房子一样,法律和法律都是相互依存的。——伯克
异步电动机变压变频调速原理和按稳态模型控制的转差功率不变调速系统

19
将式 (313) 对 s求导,令 dTe/ds=0,可得恒 Es/ω1 控制特性在最大转矩时 的临界转差率为
最大转矩为
sm
=
R′r
ω1(Lls+L′lr)
(316)
( ) 3
Temax=2pn
Es ω1
21 Lls+L′lr
(317)
值得注意的是,在式 (317) 中,当频率变化时,按恒 Es/ω1控制的 Temax值恒 定不变,再与式 (311) 相比可见,恒 Es/ω1控制的最大转矩大于恒 Us/ω1控制时 的最大转矩,可见恒 Es/ω1控制的稳态性能是优于恒 Us/ω1控制的。
分母中的 R′r2项,则
( ) Te≈3pn
Es ω1
2
sω1(LRls′r+L′lr)2∝
1 s
(315)
这又是一段双曲线。s值为上述两段的中间值时,
机械特性在直线和双曲线之间逐渐过渡,整条特
性与恒压频比特性相似,图 36中给出了不同控
制方式时的机械特性。其 中,特 性 曲 线 1是 恒
Us/ω1控制特性,特性曲线 2是恒 Es/ω1 控制特 性。
带负载时,转速降落 Δn为
n1
=60f1 =60ω1 pn 2πpn
(11)
60 Δn=sn1 =2πpnsω1 在式 (37) 所示的机械特性近似直线段上,可以导出
(39)
( ) sω1≈3pRn′rωUTe1s 2
(310)
由此可见,当 Us/ω1为恒值时,对于同一转矩 Te值,sω1 基本不变,因而 Δn
R′r2 +s2ω2 1(Lls+L′lr)2
(313)
这就是恒 Es/ω1或恒 Φsm控制时的机械特性方程式。 利用与前述相似的分析方法,当 s很小时,可忽略式 (313)分母中含 s项,则
第4章异步电机的电力拖动4
2n0 U 线电压:U1N,相电压: 1N 3 线电流: 2I N
假定变极调速前后电机的功率因数 cos1 、效率 均不变,并 设每半相绕组中的电流均为额定值 I N ,则 /YY变极前后电动机
的输出功率和输出转矩分别满足下列关系:
3U N ( 3I 1N ) cos1 P 3 0.866 PYY 2 3U N (2 I 1N ) cos1
平滑性最好;调速不连续,级数有限,称为有级调速
4.4 三相异步电动机的调速
4. 调速的稳定性 —— 静差率
静差率(相对稳定性):指电动机在一条机械特性由理想空 载加到额定负载所出现的转速降与理想空载转速之比。 静差 率越小, 转速的相对稳定性越好。
n
n n0 n f 100% n0 n0
速受转速相对稳定性(即静差率)要求的限制。
4.4 三相异步电动机的调速
2. 调速方向—— nN为基速
3. 调速的平滑性 —— 平滑系数
指相邻两级转速的接近程度,用平滑系数表示 平滑系数:相邻两级转速或线速度之比。
ni ni 1
平滑系数 越接近1,说明调速的平滑性越好。如果转速
连续可调,其级数趋于无穷多,称为无级调速,=1,其
电机与拖动
第 4 章 异步电机的电力拖动 第
4.1 三相异步电动机的机械特性 4.2 电力拖动系统的稳定运行 4.3 三相异步电动机的起动 4.4 三相异步电动机的调速 4.5 三相异步电动机的制动
第 4 章 异步电动机的电力拖动
4.4 三相异步电动机的调速
调速:人为改变转速的方法 机械调速:改变传动机构的传动比改变工作机构的速度 电气调速:人为改变电动机的参数(如电压、励磁电流 或电枢回路电阻),使同一负载得到不同转速。
电力拖动自动控制系统(陈伯时)ppt6-5基于异步电动机稳态模型的变压变频调速系统
转速开环恒压频比控制的调速系统通用变频器异步电动机调速系统电力拖动自动控制系统电力拖动自动控制系统电力传动控制系统电力传动控制系统44电压检测泵升限制电流检测温度检测电流检测单片机显示设定接口pwm发生器驱动电路b进线电抗器电力拖动自动控制系统电力拖动自动控制系统电力传动控制系统电力传动控制系统55二极管整流器虽然是全波整流装置但由于其输出端有电容存在因此输入电流呈脉冲波形必须进行滤波
R K Φ m m '2 ' 2 R ( ) r sL lr
9
当电机稳态运行时,s 值很小,因而s 也很小,只有1的百分之几,可以认 ' ' 为 , L R s lr r 2 则转矩可近似表示为: s T K Φ e m m ' R r
在s 值很小的稳态运行范围内,如果 能够保持气隙磁通m不变,异步电动 机的转矩就近似与转差角频率s 成正 比。控制转差频率s ,就代表控制转 矩。
sm 的限幅转矩Tem 进行控制,保
证了在允许条件下的快速性。
18
转差频率控制系统的不足 之处(1)
转差频率控制规律是从稳态等效 电路和稳态转矩公式出发的,所 谓的“保持磁通 m恒定”的结论 也只在稳态情况下才能成立,这 不得不)
转差频率控制规律之二
U
s
Eg/1=Const.
Us/1=Const.
定子电流增大的趋势 O
1
15
(3)转差频率控制的变压变 频调速系统
Is
ASR
s 1
U
s
U
PWM
sa
1
U
sb
U sc
电 压 型 逆 变 器
M 3~
R K Φ m m '2 ' 2 R ( ) r sL lr
9
当电机稳态运行时,s 值很小,因而s 也很小,只有1的百分之几,可以认 ' ' 为 , L R s lr r 2 则转矩可近似表示为: s T K Φ e m m ' R r
在s 值很小的稳态运行范围内,如果 能够保持气隙磁通m不变,异步电动 机的转矩就近似与转差角频率s 成正 比。控制转差频率s ,就代表控制转 矩。
sm 的限幅转矩Tem 进行控制,保
证了在允许条件下的快速性。
18
转差频率控制系统的不足 之处(1)
转差频率控制规律是从稳态等效 电路和稳态转矩公式出发的,所 谓的“保持磁通 m恒定”的结论 也只在稳态情况下才能成立,这 不得不)
转差频率控制规律之二
U
s
Eg/1=Const.
Us/1=Const.
定子电流增大的趋势 O
1
15
(3)转差频率控制的变压变 频调速系统
Is
ASR
s 1
U
s
U
PWM
sa
1
U
sb
U sc
电 压 型 逆 变 器
M 3~
基于动态模型的异步电动机调速系统设计
基于动态模型的异步电动机调速系统设计
1. 异步电动机调速系统简介:
异步电动机是目前工业领域中使用最为普遍的电机之一。
它具
有体积小、重量轻、成本低、可靠性高等优点,因此应用广泛。
异
步电动机调速系统是将电机的转速和负载转矩进行控制,以实现电
机性能的优化。
常用的调速方法有电压调制、变频调速、脉宽调制等。
2. 动态模型简介:
异步电动机的动态模型是控制系统设计中的重要基础,它描述
了电机输入电压、输出机械转矩和电机转速之间的关系,用于分析
和优化控制方案。
异步电动机一般采用dq坐标系下的动态模型,其
中d轴代表电机转矩,q轴代表磁场转矩。
3. 异步电动机调速系统的设计过程:
步骤1:确定系统的调速要求,包括电机的负载特性、转矩、
速度等参数。
步骤2:建立异步电动机的数学模型,可以采用dq坐标系下的
动态模型或者其他常用的电机模型。
步骤3:设计控制器,常用的控制方法有PID控制、模糊控制、神经网络控制等。
步骤4:进行仿真分析,验证控制系统的性能和可行性。
步骤5:进行实验验证,对设计的控制器进行调试和优化。
步骤6:对系统进行性能评价,包括响应速度、稳态误差、动态误差等指标。
4. 结论:
基于动态模型的异步电动机调速系统设计可以提高电机的控制性能,并且可以根据实际需求进行优化。
在实际应用中,需要根据具体的负载要求选择合适的控制方法和控制器,以达到最佳的调速效果。
基于稳态模型的异步电动机调速共85页文档
45、法律的制定是为了保证每一个人 自由发 挥自己 的才能 ,而不 是为了 束缚他 的才能 。—— 罗伯斯 庇尔
谢谢!
51、 天 下 之 事 常成 于困约 ,而败 于奢靡 。——陆 游 52、 生 命 不 等 于是呼 吸,生 命是活 动。——卢 梭
53、 伟 大 的 事 业,需 要决心 ,能力 ,组织 和责任 感。 ——易 卜 生 54、 唯 书 籍 不 朽。——乔 特
55、 为 中 华 之 崛起、实际上,我们想要的不是针对犯 罪的法 律,而 是针对 疯狂的 法律。 ——马 克·吐温 42、法律的力量应当跟随着公民,就 像影子 跟随着 身体一 样。— —贝卡 利亚 43、法律和制度必须跟上人类思想进 步。— —杰弗 逊 44、人类受制于法律,法律受制于情 理。— —托·富 勒
谢谢!
51、 天 下 之 事 常成 于困约 ,而败 于奢靡 。——陆 游 52、 生 命 不 等 于是呼 吸,生 命是活 动。——卢 梭
53、 伟 大 的 事 业,需 要决心 ,能力 ,组织 和责任 感。 ——易 卜 生 54、 唯 书 籍 不 朽。——乔 特
55、 为 中 华 之 崛起、实际上,我们想要的不是针对犯 罪的法 律,而 是针对 疯狂的 法律。 ——马 克·吐温 42、法律的力量应当跟随着公民,就 像影子 跟随着 身体一 样。— —贝卡 利亚 43、法律和制度必须跟上人类思想进 步。— —杰弗 逊 44、人类受制于法律,法律受制于情 理。— —托·富 勒