坐标正反算计算公式
测量坐标正反算的方法

测量坐标正反算的方法测量坐标是一种常见的测量方法,用于确定物体在平面或者空间中的位置。
在实际测量中,我们往往需要进行坐标的正反算,即根据已知的坐标计算未知物体的位置或者根据已知物体的位置计算其坐标。
本文将介绍常见的测量坐标正反算的方法。
一、坐标的正算坐标的正算是指根据已知物体的位置计算其坐标。
在实际测量中,我们常用的方法有:1. 三角测量法三角测量法是一种基于三角关系的测量方法,适用于平面测量。
它利用视线方向的角度和边长关系推导出物体的坐标。
在三角测量法中,首先需要选择至少两个已知基准点,并确定其坐标。
然后,通过测量目标点与基准点之间的角度和边长,利用三角关系计算出目标点的坐标。
三角测量法的优点是精度较高、适用范围广,但需要测量目标点与基准点之间的角度和边长,测量过程比较复杂。
2. 几何测量法几何测量法是一种基于几何关系的测量方法,适用于平面和空间测量。
它利用测量物体与多个基准点之间的几何关系计算出物体的坐标。
在几何测量法中,首先需要选择至少三个已知基准点,并确定其坐标。
然后,通过测量目标点与基准点之间的距离、角度和方向等几何关系,利用几何图形和计算方法计算出目标点的坐标。
几何测量法的优点是简单易懂、计算方便,但需要选择合适的基准点和利用几何关系进行计算,对测量者的几何知识要求较高。
二、坐标的反算坐标的反算是指根据已知坐标计算出物体的位置。
在实际测量中,我们常用的方法有:1. 三角反算法三角反算法是一种基于三角关系的计算方法,适用于平面测量。
它利用已知基准点的坐标和目标点与基准点之间的角度和边长关系推导出目标点的位置。
在三角反算法中,首先需要选择至少两个已知基准点,并确定其坐标。
然后,通过测量目标点与基准点之间的角度和边长,利用三角关系计算出目标点的位置。
三角反算法的优点是计算简单、精度较高,但需要测量目标点与基准点之间的角度和边长。
2. 几何反算法几何反算法是一种基于几何关系的计算方法,适用于平面和空间测量。
高斯投影坐标反算公式.ppt

15
说明:⑴ 为 l 的奇函数,而且 l 越大, 越大;
⑵ 有正负,当描写点在中央子午线以东时, 为正, 以西时, 为负;
⑶ 当 l 不变时,则 随纬度增加而增大。
(2)由平面坐标 x,y 计算平面子午线收敛角
(x,y) (l,Bf )
Nf
y tan Bf [1
y2 3N f 3
(1
tan2 Bf
y3
1
120N
5 f
c os B f
5
28t
2 f
24t
4 f
y5
B Bf
tf
2M f N f
y2
t
3 f
24M
f
N
3 f
5
3t
2 f
2 f
9
2 f
t
2 f
y4
5、中央子午线收敛角和经度
Nf
y tan Bf [1
y2 3N f 3
(1
tan2
Bf
f 2)]
L L0 l
小结
②计算中央子午线经度
六度带 L0 6n 3 三度带 L0 3n
11 n 24 23 n 49
2、迭代法求取大地纬度 迭代开始时设 B1f X a0
以后每次迭代按下式计算
F
(
B
i f
)
a2 2
sin 2Bif
a4 4
sin 4Bif
a6 6
sin 6Bif
Bif1 (X F(Bif )) a0
计算子午线收敛角的意义: 1、用于大地方位角和高斯平面坐标方位角的转换; 2、高斯正反算检核坐标计算的正确性。。
大地方位角=坐标方位角-子午线收敛角+方向改化
卡西欧5800公路坐标正反算程序

一、坐标正算基本公式 (02)二、坐标反算原理 (04)三、高程数据库录入变换 (05)四、计算器程序 (07)01、ZBZS (坐标正算) (07)02、ZBFS (坐标反算) (08)03、GCJF (高程积分) (09)04、PJFY (坡脚放样) (10)05、JFCX (积分程序) (11)06、ZBFY (坐标放样) (11)07、DT (递推) (12)08、HP (横坡) (13)09、LK (路宽) (14)10、SJKl (平面数据库) (14)IK SJK2 (纵面数据库) (14)12、SJK3 (左路宽度数据库) (15)13、SJK4 (右路宽度数据库) (15)14、SJK5 (横坡数据库) (16)15、SJK6 (下边坡数据库) (16)16、SJK7 (左上边坡数据库) (17)17、SJK8 (右上边坡数据库) (18)五、后记 (19)CASIO 5800计算器公路工程测量程序4 一、正算所涉及的计算公式图表1 在图1中,A点为回旋曲线起点,B点为回旋曲线止点,I点为所求坐标点。
设:A点的X坐标为XA , Y坐标为Y A, A点的切线方位角为α, A点的曲率为PA点的里程为L A, B点的曲率为p 8, B点的里程为L B, I点的曲率为p∣, I点的里A,程为L I O I点的切线角为B o由于回旋线上各点曲率半径Ri和该点至曲线起点的距离L成反比。
故此任意点的曲率为;Q =丄=土(C为常数)(1 )R i C由式(1)可知,回旋曲线任意点的曲率按线性变化,由此回旋曲线上里程为L点的曲率为;iL-I,、Pi = PA + (PB - PJ × I, _ /(2)当曲线右偏时P 8、PA取正值,反之取负值。
设:则有:P i = PA + ML在I 点处取一微段,则有:d β=- = P l d l (单位为弧度)Ri因已知回旋曲线起点A 的切线方位角α ,则里程为Li 点的切线方位角为:a, =a + βi将式(7)代入式(8)得:a i = a + + (单位为弧度)(9) 2对于式(9),当P A =0, M 二0时,则a i =a ,式(9)变成计算直线段上任意 点切线方位角的计算公式;当P A=C (C 为常数),M=O 时,则CIi 二a + P A L,式(9) 变成计算圆曲线上任意点切线方位角的计算公式。
高斯坐标正反算

正形投影的一般条件基本出发点:在正形投影中,长度比与方向无关。
1、长度比的通用公式如图4-42,在微分直角三角形P1P2P3及P1′P2′P3′中有:其中l=L-L0,L0通常是中央子午线的经度,L是P点的经度令:()()222222d=d cos dd=d dS M B N B ls x y++(1)m平方可为:()()()22222222222d d d d dd d cos d dcos dcoss x y x ymS M B N B l M BN B lN B++⎛⎫===⎪⎡⎤⎝⎭+⎛⎫+⎢⎥⎪⎝⎭⎢⎥⎣⎦(2)为简化公式,令:ddcosM BqN B=dc o sB M BqN B=⎰(3) q称为等量纬度,因为它只与纬度B有关。
这样,式(2)可表示为:()()222222d dd dx ymr q l+=⎡⎤+⎣⎦(4)我们投影的目的是:建立平面坐标xy和大地坐标BL之间的函数关系,由式(3)可知,即建立xy和bl的函数关系。
令()(),,x x l q y y l q==(5) 对上式进行全微分可得:d d dd d dx xx q lq ly yy q lq l∂∂⎧=+⎪∂∂⎪⎨∂∂⎪=+⎪∂∂⎩(6)将上式代入式(1)中第二项,并令:2222x yEq qx x y yFq l q lx yGl l⎧⎛⎫⎛⎫∂∂=+⎪ ⎪ ⎪∂∂⎪⎝⎭⎝⎭⎪∂∂∂∂⎪=+⎨∂∂∂∂⎪⎪∂∂⎛⎫⎛⎫⎪=+⎪ ⎪∂∂⎪⎝⎭⎝⎭⎩(7)可得: ()()()()222d d 2d d d s E q F q l G l =++ (8) 则式(4)可写为: ()()()()()()222222d 2d d d d d E q F q l G l m r q l ++=⎡⎤+⎣⎦ (9)2 柯西-黎曼条件在上式引入方向,如图4-42所示:2313d d cot d d P P M B q A PP r l l === (10) 即: d tan d l A q = (11)将式(11)代入式(9)可得:注意sec 1cos A A =()()()()()222222222222222d 2tan d tan d d tan d 2tan tan sec cos 2sin cos sin E q F A q G A q m r q A q E F A G A r AE AF A AG A r ++=⎡⎤+⎣⎦++=++=(12)要想让m 和A 无关,必须使F=0,E=G ,即22220x x y y q l q l x y x y q q l l ∂∂∂∂⎧+=⎪∂∂∂∂⎪⎨⎛⎫⎛⎫∂∂∂∂⎛⎫⎛⎫⎪+=+⎪ ⎪ ⎪ ⎪⎪∂∂∂∂⎝⎭⎝⎭⎝⎭⎝⎭⎩ (13) 由上式第一式可得:y y x q l x lq∂∂∂∂∂=-∂∂∂(14)代入第二式可得: 222222y x y y x lq q q q x q ∂⎛⎫⎪⎡⎤⎛⎫⎛⎫⎛⎫⎛⎫∂∂∂∂∂⎝⎭+=+⎢⎥ ⎪ ⎪ ⎪ ⎪∂∂∂∂⎢⎥⎝⎭⎝⎭⎝⎭⎝⎭⎛⎫∂⎣⎦⎪∂⎝⎭(15) 消去公共项可得: 22x y q l ⎛⎫∂∂⎛⎫= ⎪ ⎪∂∂⎝⎭⎝⎭ (16)开方并代入式(13)的第一项:x y q l x y lq ∂∂⎧=⎪∂∂⎪⎨∂∂⎪=-⎪∂∂⎩ (17)高斯投影坐标正算高斯投影三条件:L0为直线;L0长度不变;正形投影 1、幂级数展开公式(x 偶y 奇)l /ρ微小量(ρ''=206265),可进行级数展开,可得:2402435135x m m l m l y m l m l m l ⎧=+++⎪⎨=+++⎪⎩(18) 式中mi 为待定系数,是q 、B 的函数。
高斯正反算计算函数

高斯正反算计算函数高斯正反算(Gauss forward and backward calculation)是一种用于大地测量中进行坐标计算的方法。
该方法以德国数学家高斯(Carl Friedrich Gauss)的名字命名,用于将球面坐标(经度、纬度、大地高)转换为平面直角坐标(X、Y、Z)或反之。
正算(forward calculation)是将球面坐标转换为平面直角坐标。
该过程包括以下几个步骤:1.首先,确定球面坐标的基准,通常选择一个已知的起始点。
2.然后,计算球面坐标与基准点之间的角度差值,并将其转换为弧度。
3.使用三角函数,根据球面坐标的经度、纬度以及角度差值,计算出平面直角坐标的X、Y、Z值。
反算(backward calculation)是将平面直角坐标转换为球面坐标。
该过程与正算相反,包括以下几个步骤:1.确定平面直角坐标的基准点,即已知的起始点。
2.计算平面直角坐标与基准点之间的距离差值,通常使用勾股定理计算距离。
3.使用三角函数,根据平面直角坐标的X、Y、Z值以及距离差值,计算出球面坐标的经度、纬度以及大地高。
高斯正反算的原理是基于球面三角学和球面坐标系的转换公式。
在正算中,通过球面三角学的公式计算球面坐标与基准点之间的角度差值,并使用三角函数计算平面直角坐标。
在反算中,通过勾股定理计算平面直角坐标与基准点之间的距离差值,并使用三角函数计算球面坐标。
总结起来,高斯正反算是一种用于大地测量中进行坐标计算的方法,通过球面三角学和转换公式将球面坐标和平面直角坐标进行转换。
正算将球面坐标转换为平面直角坐标,反算将平面直角坐标转换为球面坐标。
它在地理信息系统、地图制图等领域有着广泛的应用。
工程测量计算
h1
hAB h a b
水准测量手簿
日期 天气 仪器 地点 观测 记录
测站 Ⅰ Ⅱ Ⅲ
测点
BMA TP1 TP1
BMA
TP1 TP1 TP2 TP2 TP2 TP2 BB
水准尺读数 后视(a) 前视(b) 1467 1.467 1124 1.124 1385 1.385 1021 1.021 1869 1.869 0943 0.943
四、水准测量的实施
如下图所示,当欲测的高程点B距水准点A较远或高差较大时,安置一次仪器不 能测出A、B两点间的高差,就要分段和连续地进行测量工作。
1、踏勘选点建立标志; 2、拟定水准路线; 3、观测记录
a3 b2 b1
TP2
b3 B
Ⅲ
a2 a1
TP1
h3
hAB
Ⅱ
h2
Ⅰ
A
h1 a1 b1 h2 a 2 b2 h3 a 3 b3
往
593.391
返
593.400
往
491.360
返
497.301
•••
••• ••• ••• ••• ••• ••• ••• •••
11o3249
118.780 1.440 1.502 0.022 +118.740
11o3306
-118.829 1.491 1.400 0.022 -118.716
O D
(2)下半测回
倒镜成盘右,逆时针依次观测A,D,C,B,A。
同理各测回间按1800/N的差值,来配置水平度盘。
B C
零方向 A O D
3.计算、记录
(1)半测回归零差: J2 ≤ 12 " ;J6 ≤ 18 " 。 (2)2C值(两倍照准误差): 2C=盘左读数-(盘右读数±180°)。 一测回内2C互差:J2≤18 " ;J6不作要求。
卡西欧4800坐标正反算通用程序(终极篇)
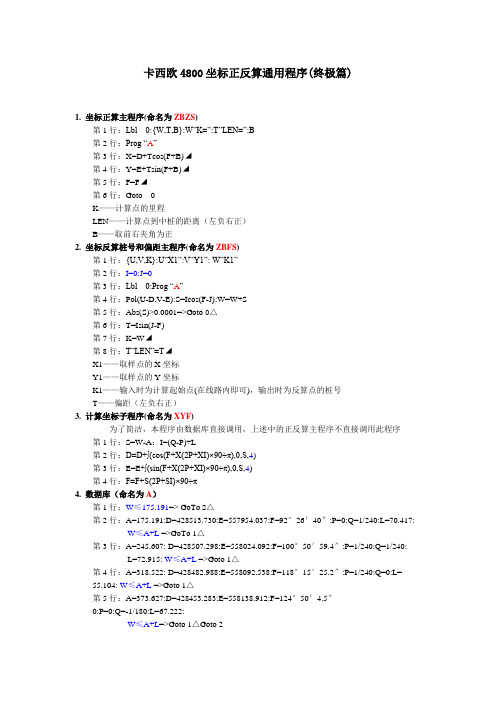
卡西欧4800坐标正反算通用程序(终极篇)1. 坐标正算主程序(命名为ZBZS)第1行:Lbl 0:{W,T,B}:W”K=”:T”LEN=”:B第2行:Prog “A”第3行:X=D+Tcos(F+B)◢第4行:Y=E+Tsin(F+B)◢第5行:F=F◢第6行:Goto 0K——计算点的里程LEN——计算点到中桩的距离(左负右正)B——取前右夹角为正2. 坐标反算桩号和偏距主程序(命名为ZBFS)第1行:{U,V,K}:U”X1”:V”Y1”: W”K1”第2行:I=0:J=0第3行:Lbl 0:Prog “A”第4行:Pol(U-D,V-E):S=Icos(F-J):W=W+S第5行:Abs(S)>0.0001=>Goto 0△第6行:T=Isin(J-F)第7行:K=W◢第8行:T”LEN”=T◢X1——取样点的X坐标Y1——取样点的Y坐标K1——输入时为计算起始点(在线路内即可),输出时为反算点的桩号T——偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:S=W-A:I=(Q-P)÷L第2行:D=D+∫(cos(F+X(2P+XI)×90÷π),0,S,4)第3行:E=E+∫(sin(F+X(2P+XI)×90÷π),0,S,4)第4行:F=F+S(2P+SI)×90÷π4. 数据库(命名为A)第1行:W≤175.191=> GoTo 2△第2行:A=175.191:D=428513.730:E=557954.037:F=92°26′40″:P=0:Q=1/240:L=70.417: W≤A+L =>GoTo 1△第3行:A=245.607: D=428507.298:E=558024.092:F=100°50′59.4″:P=1/240:Q=1/240: L=72.915: W≤A+L =>Goto 1△第4行:A=318.522: D=428482.988:E=558092.538:F=118°15′25.2″:P=1/240:Q=0:L=55.104: W≤A+L =>Goto 1△第5行:A=373.627:D=428453.283:E=558138.912:F=124°50′4.5″0:P=0:Q=-1/180:L=67.222:W≤A+L=>Goto 1△Goto 2第6行:Lbl 1:Prog “XYF”: Goto 3第7行:Lbl 2:D=0:E=0:F=0第8行:Lbl 3A——曲线段起点的里程D——曲线段起点的x坐标E——曲线段起点的y坐标F——曲线段起点的坐标方位角P——曲线段起点的曲率(左负右正)Q——曲线段终点的曲率(左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)正算主程序可以计算一般边桩的坐标,如要计算类似涵洞端墙的坐标需增加两个变量,具体方法参考本程序集中的第1篇辛普生公式的坐标计算通用程序(2)程序规定,左偏曲线曲率(半径倒数)输入负值,右偏曲线曲率输入正值,直线上点曲率输入0。
坐标反算公式、示意图及相应5800程序案例

反算原理在图中,A点为已知坐标而待求对应中桩桩号及边距的点。
B点为假定的A点对应中桩桩号点。
显然,B点并不对应于A点。
做出B点的切线,过A点做辅助线垂直于B点的切线,相交于C点。
设:B点的切线方位角为α,B点的桩号为K B,B点的坐标分别为X B、Y B,A点的桩号为K A,A点的坐标分别为X A、Y A,“B-A”的方位角为β,“B-A”的距离为N,“B-C”的距离为L,“C-A”的距离为Z。
根据前面的坐标正算的公式可以得到α,X B、Y B值。
根据计算器内置的Pol(X A-X B,Y A-Y B)公式(直角坐标转换为极坐标)能得到β,N值。
(1)(2)当L=0时,B点是对应于A点的,K B=K A,Z即为A点的距中桩的距离。
当L≠0时,则采用K B=K B+L,对B点进行新的假定,进而再次对L进行解算,直至L=0,或则L值在容许误差范围之内。
坐标正反算通用程序(终极篇)1. 坐标正算主程序(命名为KP-XY)第1行:Lbl 0“DK=”?K:“PJ=”? P:“α=”?W第2行:Prog “GP”(GP为线路名称)第3行:“X=”:X+Pcos(F+W)→X◢第4行:“Y=”:Y+Psin(F+W)→Y◢第5行:“FWJ=”:F►DMS◢第6行: Goto 0K——计算点的里程PJ——计算点到中桩的距离(左负右正)α——取线路前进方向右夹角为正X、Y--为计算坐标、F为方位角GP--为线路平曲线名称2. 坐标反算桩号和偏距主程序(命名为XY-KP)第1行:“DK=”?K:“X:=”? U:“Y:=”?V第2行:Lbl 0Prog “GP”第3行:Pol(U-X,V-Y):Icos(F-J)→Z[1]:K+Z[1]→K 第4行:Abs(Z[1])>0.0001=>Goto 0第5行:“DK=”:K◢第6行:“PJ=”:Isin(J-F)→P◢X:= —取样点的X坐标Y:= —取样点的Y坐标DK= 输入时为计算起始点(在线路内即可),输出时为反算点的桩号P—偏距(左负右正)3. 计算坐标子程序(命名为XYF)为了简洁,本程序由数据库直接调用,上述中的正反算主程序不直接调用此程序第1行:K-G→S:(D-C)÷L→I第2行:X+∫(cos(F+X(2C+XI)×90÷π),0,S)→X第3行:Y+∫(sin(F+X(2C+XI)×90÷π),0,S)→Y第4行:F+S(2C+SI)×90÷π→F第5行:F<0=>F+360→F: F>360=>F-360→F4. 数据库(命名为A)第1行:0→G:3925525.975→X:502796.176→Y:3°47′30.2″→F:1/996→C:1/180→K≤G+L =>GoTo1(第一缓和曲线)第2行:245.607→G: 3925566.736→X:502801.006→Y:11°30′39.4″→F: 1/180→C:1/180→D:91.027→L:K≤G+L =>Goto1(圆曲线)第3行:318.522→G: 3925647.682→X:502804.484→X:40°29′08.7″→F: 1/180→C: 1/295.54→D: 70.37→L:K≤G+L =>Goto1(第二缓和曲线)第4行:Lbl 1:Prog “XYF”G——曲线段起点的里程X——曲线段起点的x坐标Y——曲线段起点的y坐标F——曲线段起点的坐标方位角C——曲线段起点的曲率(半径倒数,直线为0,左负右正)D——曲线段终点的曲率(半径倒数,直线为0,左负右正)L——曲线段长度(尽量使用长度,为计算断链方便)说明:(1)适用于任意线形:直线(0→C、0→D)、圆曲线(圆半径倒数→C、圆半径倒数→D)、缓和曲线(0或圆半径倒数→C、圆半径倒数或0→D)、卵形曲线(接起点圆的半径倒数→C、接终点圆的半径倒数→D),曲线左转多加一负号。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
坐标正反算计算公式
引言
在数学和计算机科学领域中,坐标转换是一种常见的操作。
坐标正反算是指从
一个坐标系中的点转换到另一个坐标系中的点,并且可以从目标坐标系中的点转换回原始坐标系中的点。
这种计算在许多应用中都非常有用,例如地理信息系统、计算机图形学和机器人学。
坐标正算
坐标正算是将一个坐标点从原始坐标系转换到目标坐标系的过程。
在二维平面中,我们可以使用以下公式将点(x, y)从原始坐标系转换到目标坐标系:
x' = x * cos(θ) - y * sin(θ) + dx
y' = x * sin(θ) + y * cos(θ) + dy
其中,(x, y)是原始坐标系中的点,(x’, y’)是目标坐标系中的点,θ是旋转角度,dx和dy是平移量。
这些参数确定了坐标转换的方式。
坐标反算
坐标反算是将一个坐标点从目标坐标系转换回原始坐标系的过程。
在二维平面中,我们可以使用以下公式将点(x’, y’)从目标坐标系转换回原始坐标系:
x = (x' - dx) * cos(-θ) - (y' - dy) * sin(-θ)
y = (x' - dx) * sin(-θ) + (y' - dy) * cos(-θ)
同样地,(x’, y’)是目标坐标系中的点,(x, y)是原始坐标系中的点,θ是旋转角度,dx和dy是平移量。
应用举例
坐标正反算的计算公式在各种应用中都有广泛的应用。
•地理信息系统(GIS)中,坐标转换用于将地球表面的经纬度坐标转换为平面坐标系(如投影坐标系)。
这种转换对于地图制图和空间数据分析非常重要。
•在计算机图形学中,坐标转换用于将三维物体的顶点坐标从模型空间转换到世界空间,然后转换到相机空间或屏幕空间。
通过坐标转换,我们可以实现物体的旋转、缩放和平移等操作。
•在机器人学中,坐标转换用于描述机器人的位置和姿态,以及机器人在不同坐标系中的运动。
这对于路径规划、目标追踪和运动控制非常重要。
结论
坐标正反算计算公式是将点从一个坐标系转换到另一个坐标系的重要工具。
通
过旋转、平移和缩放等操作,我们可以方便地在不同坐标系中操作和处理数据。
这种计算在地理信息系统、计算机图形学和机器人学等领域具有广泛的应用。
熟悉坐标正反算的计算公式,可以帮助我们更好地理解和应用这些领域的相关算法和技术。