汽车主动前轮转向与直接横摆力矩协调控制
线控转向系统技术综述与实车应用(一)
◆文/江苏 高惠民线控转向系统技术综述与实车应用(一)一、概述汽车线控技术(X-by-wire)起源于飞机的电传操纵系统,飞行员不再通过传统的机械回路或液压回路来控制飞机的飞行姿态,而是通过安装在操纵杆处的传感器检测飞行员施加在其上的力和位移,并将其转换为电信号,在电控单元中将信号进行处理,然后传递到执行机构,从而实现对飞机的控制。
随着线控技术的发展,这一技术逐渐应用到汽车。
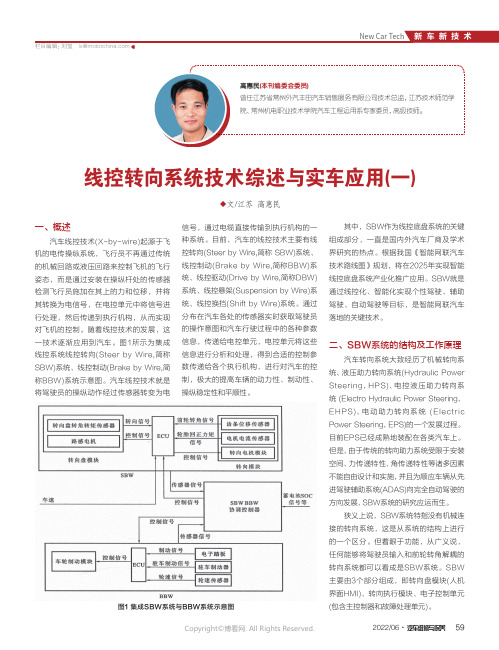
图1所示为集成线控系统线控转向(Steer by Wire,简称 SBW)系统、线控制动(Brake by Wire,简称BBW)系统示意图。
汽车线控技术就是将驾驶员的操纵动作经过传感器转变为电信号,通过电缆直接传输到执行机构的一种系统。
目前,汽车的线控技术主要有线控转向(Steer by Wire,简称 SBW)系统、线控制动(Brake by Wire,简称BBW)系统、线控驱动(Drive by Wire,简称DBW)系统、线控悬架(Suspension by Wire)系统、线控换挡(Shift by Wire)系统。
通过分布在汽车各处的传感器实时获取驾驶员的操作意图和汽车行驶过程中的各种参数信息,传递给电控单元,电控单元将这些信息进行分析和处理,得到合适的控制参数传递给各个执行机构,进行对汽车的控制,极大的提高车辆的动力性、制动性、操纵稳定性和平顺性。
其中,SBW作为线控底盘系统的关键组成部分,一直是国内外汽车厂商及学术界研究的热点。
根据我国《智能网联汽车技术路线图》规划,将在2025年实现智能线控底盘系统产业化推广应用。
SBW就是通过线控化、智能化实现个性驾驶、辅助驾驶、自动驾驶等目标,是智能网联汽车落地的关键技术。
二、SBW系统的结构及工作原理汽车转向系统大致经历了机械转向系统、液压助力转向系统(Hydraulic Power Steering,HPS)、电控液压助力转向系统 (Electro Hydraulic Power Steering,EH PS)、电动助力转向系统 (El ectr ic Power Steering,EPS)的一个发展过程。
汽车底盘控制技术的现状和发展趋势
汽车底盘控制技术的现状和发展趋势摘 要:电子控制系统在汽车底盘技术中的广泛应用极大地改善了汽车的主动安全性。
常见的底盘控制系统可分为制动控制、牵引控制、转向控制和悬挂控制。
介绍通过高速网络将各控制系统联成一体形成的全方位底盘控制(GCC),汽车开放性系统构架工程(AUTO SAR)和底盘的线控技术。
关键词:底盘控制系统;主动安全性;综述一、汽车底盘的电子化技术1.1 全电路制动系统(BBW)控制单元是BBW的控制核心,它负责BBW信号的收集和处理,并对信号的推理判断以及据此向制动器发出制动信号。
此外,根据汽车智能化的发展趋势,汽车底盘上的各种电子控制系统将与制动控制系统高度集成,同时在功能上趋于互补。
1.2 汽车转向控制系统1.2.1 后轮转向系统(RWS)对于整体式RWS执行机构,用一个横拉杆位移传感器就能确定两后轮的转向角。
但分离式RWS执行机构需要至少两个位移传感器。
由于分离式RWS执行机构的元件多,两后轮的控制和协调比较复杂,现在研发更多的是整体式RWS执行机构。
整体式RWS执行机构又分液压式和机电式两种。
正常工作时,后轮的转向角是转向盘转向角和汽车行驶速度的函数。
汽车低速行驶时,当转向盘的执行机构给后轮一个相应方向相反的转向角。
从而使汽车在低速拐弯或停车时,转弯半径变小,使汽车转向和停车更方便快速、舒适。
当汽车高速行驶时,给后轮一个与前轮转向角方向一致的转向角。
汽车的前后轮同时向同一方向转向,可提高汽车的方向稳定性,特别是汽车在高速行驶换道时,汽车不必要的横摆运动会大大减小,从而增强了汽车的方向稳定性,当汽车制动时,同系统相配合,可及时通过主动后轮转向角来平衡制动力所产生的横摆力矩,既能保持汽车的方向稳定性,又能最大限度地利用前轮的制动力,改进汽车的制动性能。
1.2.2 ESPⅡ(或者ESP plus)由于ESP系统在对轿车的行驶状态进行干涉时,只是通过对单个车轮施加制动来调节轿车的行驶稳定性。
【汽车理论-吴光强(第二版)】第五章

惯性及中间坐标系
由以上两式可知, 质心加速度 为
,二向量正交。表明β很小时,
垂直于质心速度 ,其沿y向的侧向分量 ,即为侧向加速度ay 。
第五节
基于两自由度模型的 操纵稳定性分析
行驶动力学方程
车辆的两自由度模型如图5-22所示。
第五节
基于两自由度模型的 操纵稳定性分析
行驶动力学方程
第五节
基于两自由度模型的 操纵稳定性分析
第五节
基于两自由度模型的 操纵稳定性分析
行驶动力学方程
第五节
基于两自由度模型的 操纵稳定性分析
行驶动力学方程
设二轮车模型中前后轮侧偏刚度之和分别为 、 则有:
,
第五节
基于两自由度模型的 操纵稳定性分析
行驶动力学方程
整理后可得:
第五节
基于两自由度模型的 操纵稳定性分析
汽车两自由度模型的状态空间表达
车辆坐标系
图5-17为固结于汽车上的Oxyj 直角动坐标系就是车辆坐标系
第四节
汽车操纵稳定性模型建立使用 的坐标系及运动学分析
车辆坐标系
SAE规定的车辆坐标系如图5-18所示
第四节
汽车操纵稳定性模型建立使用 的坐标系及运动学分析
惯性及中间坐标系
第四节
汽车操纵稳定性模型建立使用 的坐标系及运动学分析
在汽车操纵稳定性的研究中,把汽车与驾驶者作为统一整 体来研究,如图5-1所示 。
第一节
概
述
汽车操纵稳定性的研究方法与内容
改善汽车运动学行为和安全的三个方面:
1)对车辆和轮胎行—车辆系统的分析
第一节
概
述
操纵稳定性的评价指标
汽车在水平路面上转向行驶时,不发生侧滑的极限稳定车 速为:
第五章 汽车转向系统动力学,
第五章汽车转向系统动力学问题的提出汽车转向系统动力学是研究驾驶员给系统以转向指令后汽车在曲线行驶中的运动学和动力学特性。
这一特性影响到汽车操纵的方便性和稳定性,所以也是汽车安全性的重要因素之一,因而成为汽车系统动力学中重要研究内容之一。
汽车操纵稳定性是与汽车的车速密不可分的,早期的低速汽车还谈不上稳定性的问题,最早出现稳定性的问题,是在具有较高车速的轿车上或赛车上,目前,随着车速的不断提高,轿车、大客车、载货汽车的设计都离不开汽车操纵稳定性的研究。
近年来,有许多学者研究这一问题,并取得很多成果。
操纵性不好的汽车的主要表现:1.“飘” -有时驾驶员并没有发出转向的指令,而汽车开始自己改编本方向,使人感到汽车漂浮2.“贼”-有时汽车像受惊的马,忽东忽西,汽车不听驾驶员的指令;3.“反应迟钝”-驾驶员虽然发出指令。
但是汽车还没有转向反映,转向过程反应较慢;4.“晃”-驾驶员发出了稳定的转型指令,可使汽车左右摇摆,行驶方向难以稳定,当汽车受到路面不平,或者是侧向风扰动时,汽车就会出现左右摇摆;5.“丧失路感”-正常汽车转弯的程度,会通过转向盘在驾驶员的手上产生相应的感觉,有些汽车操纵性不好的汽车,特别是在汽车车速较高时,或转向急剧时会丧失这种感觉,这会增加驾驶员操纵困难,或影响驾驶员的正确判断6.“失去控制”-某些汽车的车速超过一个临界值以后,驾驶员已经不能控制器行驶的方向。
汽车的操纵稳定性:在驾驶者不感到过分紧张、疲劳的条件下,汽车能遵循驾驶者通过转向系及转向车轮给定的方向行驶,且当遭遇外界干扰时,汽车能抵抗干扰而保持稳定行驶的能力。
汽车的操纵性:汽车能及时而准确的反映驾驶员主观操作的能力,也就是按照驾驶员的愿望维持或改变原来的行驶路线的能力。
汽车的稳定性:汽车在外力干扰下,仍能保持或很快恢复原来行驶状态和方向,而不致丧失控制、发生侧滑或翻车的能力。
101两者的关系:操纵性的丧失常导致侧滑、回转、甚至翻车;而稳定性的破坏也往往使汽车失去操纵性,处于危险状态。
汽车底盘转向技术
转向轴助力式
齿轮助力式 齿条助力式 单独助力式
EPS助力类型
电控动力转向系统的分类
根据动力源的不同,电子控制动力转向系统可分为液压式电子控制动 力转向系统(液压式EPS/HPS)和电动式电子控制动力转向系统(电动式 EPS)。
液压式EPS在传统的液压动力转向系统的基础上增设了控制液体流量 的电磁阀、车速传感器和ECU等,ECU根据检测到的车速信号,控制电 磁阀,使转向动力放大倍率实现连续可调,从而满足汽车在中、低速时 的转向助力要求。
2.控制原理
后轮转角控制(滑移角、横向风控制等) 方向盘转角与后轮转角的关系如图所示。图中的后轮转角特性是由机械转向 与电动转向特性合成后得到的。
电子转向和机械转向?
方向盘转角与后轮转角之间的关系
①大转角控制(机械式转向)
1-前带轮;2-滑阀;3-支点A;4-阀控制杆; 5-液压缸轴;6-功率活塞;7-阀套筒;8-控制凸轮
(a)2WS车
(b)4WS车
低速转向时的行驶轨迹
(a)2WS车
(b)4WS车
中、高速转向时的操纵性比较
4WS系统在不同车速下的前后轮转向比率及车轮偏转状态
1.2 4WS的控制
1. 转向角比例控制 2. 横摆角速度比例控制
转向角比例控制
转向角比例控制:是指使后轮的偏转方向在低速区与前轮的偏转方向相反, 在高速区与前轮的偏转方向相同,并同时根据方向盘转向角度和车速情况 控制后轮与前轮偏转角度比例。
液压式动力转向系统结构示意图
液压式动力转向系统的油路图
1-油箱;2-溢流阀;3-齿轮油泵;4-进油道量孔;5-单向阀;6-安全阀;7-滑阀;8-反 作用阀;9-阀体;10-回位弹簧;11-转向螺杆;12-转向螺母;13-纵拉杆;14-转向垂 臂;15-动力缸
【国家自然科学基金】_车身控制系统_基金支持热词逐年推荐_【万方软件创新助手】_20140803

科研热词 仿真 魔术公式 非线性 集成优化 防抱死制动系统 透视变换 车辆动力学 车身侧偏角 计量学 线性矩阵不等式 磁流变悬架 瞬态动力学 特征靶标 激光扫描 汽车车身 汽车 标定 最优控制 改进遗传算法 控制策略 悬架系统 协调控制 动力学稳定性控制 低附 仿人智能控制器 主动横摆力偶矩控制 主动悬架 主动前轮转向 β 法 smith预估补偿 h∞控制 15自由度
2010年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
1 1 1 1 1 1 1 1 1 1 1 1
53 54 55 56 57 58 59 60 61 62 63 64 65
局部弱形式 响应表面法 半主动控制 制动加速度 分层协调控制 免疫算法 估计 交通运输安全工程 二阶导数 主被动结合 上下文 h∞控制 bp神经网络
1 1 1 1 1 1 1 1 1 1 1 1 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17ห้องสมุดไป่ตู้18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52
汽车转向系统介绍
优点
可靠性高。 高负载能力。 路感清晰。 助力随速可变,低速时轻盈灵敏,高速稳健厚 重,大大提高行车安全性。
缺点
结构复杂、造价高、维护费用较高。
助力转向系统分类
• 机械式液压助力 • 电子液压助力 • 电动助力转向系统(Electric power steering 简称
液压式四轮转向系统
液压式四轮转向系统如图所示。其后轮的偏转方向始终与前轮偏转 方向相同,且后轮的偏转角不大于1.5°。系统没有采用电子传感器、 计算机控制和先进的传动机构。当车速超过50km/h时,系统才起 作用。倒车时系统不起作用,在后车架上装有双作用液压缸来偏转 车轮。该液压缸的压力油来自后转向液压泵。后转向液压泵由差速 器驱动。只有在前轮转向时,后轮液压泵才工作。
原理
机械式液压助力转向的主要原理是基于机械式 的齿轮齿条转向机构基础上,增加了一整套液力系 统,包括储液罐、液压助力泵、与转向柱相连的机 械阀、转向机构上的液压缸和能够推动转向拉杆的 活塞等等,液压泵由发动机通过皮带驱动,也就是 说只有发动机运转,转向泵才能够运转。
代表车型:常用于微型车如QQ、比亚迪F0等。
汽车转向系统
• 概述 • 功用 • 要求
• 类型 • 四轮转向系统 • 汽车转向技术的发展趋势
四轮转向系统
概述 四轮转向(4WS-four wheel steering)系统是基于一个安装 在后悬架上的后轮转向机构,它能够使驾驶员操纵方向盘时 转动汽车前后四个车轮,不仅提高了高速时的稳定性和可控 制,而且提高了低速时的机动性。即在高速行驶时,将后轮 与前轮同相位转向,以减小车辆转向时的旋转运动(横摆), 改善高速行驶的稳定性;而在低速行驶时,把后轮与前轮逆 相位转向,以改善车辆中低速行驶的操纵性,提高快速转向 性。
六-轮式车辆期望横摆角速度和侧偏转向控制方法

广西工学院毕业设计(外文)翻译英文原文名Desired yaw rate and steering control method during cornering for a six-wheeled vehicle中文译名六轮式车辆期望横摆角速度和侧偏转向控制方法系别汽车工程系专业班级交Y081班学生姓名XXX指导教师XXX填表日期二〇一一年9月译文:六-轮式车辆期望横摆角速度和侧偏转向控制方法.1)机械与宇航工程学院,汉城国立大学,汉城151-744,韩国2)电脑辅助机械设计工程,大津大学,Gyoenggi 487-711,韩国3),大田305-600,韩国国防发展局5-3-3集团摘要:本文提出了一种最优控制理论为基础,以改善六轮式车辆在转弯时的操作稳定性为目标转向控制方法。
六轮式车辆,相信比四个轮子的车辆在其跨越障碍的能力,越野性能和当一个或两个轮胎刺破时故障安全处理方面有更好的性能表现。
虽然人们研究和开发许多方法来提高四轮车辆的横向稳定性,但六轮式车辆的横向稳定性方面的研究比较少。
近年来一些六轮式车辆的研究已经报道,但它们是有关用四轮汽车的横摆角速度去控制六轮车辆的转向。
在本文中,通过侧滑角和横摆角速度的控制以提高转弯时的操作稳定性,提出了适合六轮式车辆所需的横摆角速度。
此外,设计了带有6个独立控制驱动马达和六个独立控制的转向私服马达的按比例缩小的汽车模型。
所提出的控制方法性能是可以通过一个完整的模型的车辆仿真模拟和按比例缩小的车辆实验验证的。
关键词:六轮式车辆的横向稳定性,所需的横摆角速度,按比例缩小的车辆1. 引言一个独立的6WD(四轮驱动)/ 6WS(转向轮)机制在特殊的用途的、军事的装甲车得以应用,以加强其转向性能和越野驱动能力。
六轮式车辆,相信比四个轮子的车辆在其跨越障碍的能力,越野性能和当一个或两个轮胎刺破时故障安全处理方面有更好的性能。
为了一个六轮车辆在转弯时达到最好的可操作性,中间及后轮转向角度根据前轮的转向和六轮式车辆的速度角度,需要加以控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车主动前轮转向与直接横摆力矩协调控制 桑楠;刘润乔;赵万忠 【摘 要】为充分利用路面的纵横向附着力,改善车辆的操纵稳定性,提出基于自抗扰解耦技术的主动前轮转向(AFS)与直接横摆力矩(DYC)集成控制方法.基于仿真实验确定发生侧滑时的车辆前轮转向临界角,并用来划分AFS与DYC各自的工作区域.对AFS与DYC的控制进行加权,使AFS控制的退出与DYC控制的介入渐变进行.基于线性二自由度车辆模型设计了AFS与DYC的自抗扰(ADR)集成控制器.在CarSim中建立车辆模型,由Simulink的控制模型进行控制,进行了高低附着路面的双移线实验.AFS与DYC集成控制相对于AFS、DYC分别单独作用,在高附着路面,其横摆角速度最大值分别下降20%和11.8%,质心侧偏角最大值分别下降28.1%和17.9%,侧向加速度最大值分别下降26.1%和20.7%;在低附着路面,其横摆角速度最大值分别下降14.5%和13.3%,质心侧偏角最大值分别下降6.7%和1.4%,侧向加速度最大值分别下降9.7%和3.5%.实验结果表明,该文协调控制策略及集成控制方法能够提高车辆在高低附着路面行驶的稳定性.
【期刊名称】《南京理工大学学报(自然科学版)》 【年(卷),期】2018(042)006 【总页数】7页(P655-661) 【关键词】汽车;主动前轮转向;直接横摆力矩;线性二自由度模型;自抗扰控制 【作 者】桑楠;刘润乔;赵万忠 【作者单位】常州工学院 机械与车辆工程学院,江苏 常州213032;南京航空航天大学 能源与动力学院,江苏 南京210016;南京航空航天大学 能源与动力学院,江苏 南京210016
【正文语种】中 文 【中图分类】U461.1;U461.6
近年来提高车辆的行驶稳定性和安全性成为研究热点,各种底盘主动控制系统的应用成为实现目标的重要手段,如已经进入商用的防抱死制动系统(Anti-lock braking system,ABS)、驱动防滑(Acceleration slip regulation,ASR)系统、电子稳定程序(Electronic stability program,ESP)、主动前轮转向(Active front steering,AFS)系统等。这些系统都是通过控制轮胎的受力实现控制目标的,如AFS通过控制轮胎的侧向受力达到控制目标,ESP中的直接横摆力矩(Direct yaw moment control,DYC)系统通过控制轮胎的纵向受力达到控制目标。随车辆底盘主动控制系统应用的增加,各系统之间的集成与协调控制的目的是最大限度发挥各子系统性能、节约成本、降低系统复杂度[1,2]。 极限工况下车辆的横向稳定性控制是研究的重点。AFS和DYC控制均能改善极限工况下车辆的横向稳定性,但需要判断车辆进入极限工况以决定控制程序介入的时机[3]。在实际应用中,多采用横摆角速度法结合相平面法予以判定,如早期Pacejka[4]考虑轮胎非线性侧偏特性,利用前轴侧偏角-后轴侧偏角相平面图,分析其对车辆操纵特性及稳定性的影响;Guo[5]考虑车辆的非线性瞬态过程,提出能量相平面方法,对车辆的全过程特性进行了分析;He等人[6]采用质心侧偏角-质心侧偏角速度相平面法界定AFS和DSC的集成工作区域;熊璐等人[7]提出用基于相平面的改进五参数菱形法确定车辆极限工况的操纵稳定性判据;张文浩等人[8]提出基于质心侧偏角-横摆角速度确定转向临界角的AFS与电子稳定性控制系统(Electronic stability control system,ESC)的集成控制方法。AFS与DYC的协调控制方法包括自适应方法[9-11]、最优H∞方法[12]、线性二次型调节器(Linear quadratic regulator,LQR)方法[8]、模型预测方法[13]、滑模控制方法[14]等。无论LQR方法、自适应方法还是H∞方法都对模型的精度依赖程度较高,且只在线性区控制效果较好,当汽车处在极限工况或大侧向加速度情况下时,轮胎处于非线性状态,则控制效果大打折扣,极端情况下会无法保证系统稳定。滑模变结构控制,特别是改进后的滑模控制如终端滑模(Terminal sliding mode,TSM)控制、非奇异终端滑模(Nonsingular terminal sliding mode,NTSM)控制等消除了线性滑模控制的抖振,并在有限时间内收敛。因此,滑模控制算法常用于汽车AFS与DYC的集成控制。 本文采用仿真实验确定轮胎达到附着极限的前轮转角,设计AFS与DYC的协调控制,使AFS与DYC能充分发挥各自的性能。本文直接横摆力矩由制动产生;自抗扰多变量解耦技术在汽车底盘集成控制[15]中应用较为方便,因此本文AFS与DYC集成控制器采用自抗扰技术设计。 1 车辆模型 车辆二自由度模型即单轨车辆模型,常用于研究车辆的侧向运动,见图1。 图1 二自由度车辆模型图 图1中,M为直接横摆力矩;r、β分别为横摆角速度和质心侧偏角;ux、uy分别为车辆纵横向速度;lf、lr分别为质心到前后轴的距离;αf、αr分别为前后轮的侧偏角;Ff、Fr分别为作用在前后轮的侧向力;δf为前轮转角。 在二自由度车辆模型基础上考虑由主动制动产生横摆力矩M。本文研究AFS与DYC的协调控制,不考虑AFS实现的具体结构,独立的前轮附加转角直接加载在前轮上,与方向盘产生的前轮转角共同构成前轮转角。汽车坐标系原点O与汽车重心(Center of gravity,CG)重合,汽车前进方向为X轴正方向,左侧为Y轴正方向,Z轴垂直于X、Y轴构成平面,Z轴正向符合右手法则。则汽车动力学方程可表示为 (1) 式中:m为汽车质量;k1、k2分别为前后轴轮胎侧偏刚度;Iz为绕Z轴的转动惯量。 对式(1)进行拉普拉斯变换得
(2) 式中
L=lf+lr为轴距。 对式(2)进行拉普拉斯反变换,得
(3) 如果考虑车辆系统的内外扰动为w1、w2,如路面不平度、侧向风影响、轮胎侧偏刚度变化、悬架变形引起的载荷转移等,则式(3)可写成如下形式
(4) 式中: 2 前轮临界转角确定 当轮胎侧向力达到附着极限时,轮胎处于非线性状态,AFS控制作用将大打折扣。因此首先通过仿真实验确定前轮的临界转角δr,以确定主动制动DYC控制的介入时机。仿真实验车辆模型的主要参数如表1所示。 表1 车辆基本参数表整车质量/kg质心距前轴距离/mm质心距后轴距离/mm整车绕z轴转动惯量/(kg·m2)轮胎型号车轮滚动半径/mm前轮距/mm后轮距/mm1 2311 0401 5602 331185/65 R153041 4811 486 在CarSim软件中设置车辆参数如表1所示,建立车辆模型,与MATLAB/Simulink联合仿真,通过前轮阶跃实验确定不同车速、不同附着系数路面下车辆前轮的临界转角,表2为仿真实验得到的不同工况下的临界转角。实验中轮胎力由CarSim软件系统根据魔术公式计算。 表2 不同工况下的前轮临界转角表车速/(km·h-1)路面附着系数前轮临界转角/(°)600.202.5900.202.01200.201.5600.506.0900.504.01200.503.5600.859.0900.857.51200.856.5 利用表2中数据,在MATLAB中用regress函数进行拟合得到前轮临界转角的近似计算公式 δr=4.482-0.081ux+10.93μ-0.0374uxμ-
(5) AFS与DYC均可控制车辆的侧向运动,车辆同时具备AFS与DYC系统,则需考虑各系统的介入时机。根据车辆临界转角确定AFS与DYC的工作区域[8]:当δf时,AFS完全输出控制量,对DYC控制输出进行加权,加权系数为p;当δf≥δr时,DYC完全输出控制量,对AFS控制输出进行加权,加权系数为q。DYC控制的介入与AFS控制的退出是1个渐进的过程,避免对系统造成冲击。 借鉴正态分布概率密度函数的形式,给出AFS控制和DYC控制的加权函数
(6) 式中:σ为正数,调节加权函数曲线形状,本文取σ=0.25。 式(4)在考虑对AFS控制和DYC控制加权后则变为
(7) 式(6)表示的权重函数图如图2所示,其直观地表示AFS控制和DYC控制各自的工作区域。 图2 AFS控制与DYC控制权重函数图 3 AFS与DYC集成控制器设计 3.1 参考模型 以二自由度车辆模型为参考模型,考虑车辆行驶的路面附着条件,在前轮角输入车辆的理想响应
(8) 式中
μ为道路附着系数。 3.2 控制器设计 实际车辆模型存在大量非线性问题,式(7)中把这些因素的作用归为w1、w2,分别放入函数fβ和fr中。如把fβ和fr视为各自方程的总和扰动,并令U1=φ1qδf+φ2pM、U2=φ3qδf+φ4pM,则可以设计各自的自抗扰控制器求解U1、U2
(9) 实际控制量u=[δf M]T可由式(10)求出
(10) 把U1、U2代入式(7)中
(11) 式中:fβ和fr扩张为系统的状态,则式(11)中的每一个方程成为标准的自抗扰控制微分方程形式,均可由自抗扰理论[16]设计各自的自抗扰控制器,求解U1、U2。 在自抗扰控制中,U1、U2称为虚拟控制量,对虚拟控制量U1设计自抗扰控制器如下
(12) 式中:β1、β2、β3为控制器参数;Fal(e,ξ,Δ)为非线性函数;fhan(e1,c·e2,r1,h1)为微分跟踪器函数,具体形式可参见文献[15]中式(2.4.6)。 非线性函数Fal(e,ξ,Δ)的表达式如下[15]
(13) 式中:ζ和Δ是正数,sign为符号函数。 式(12)中υ11、υ12可由微分跟踪器函数得到