机械原理机构力分析
机械原理 第四章

C B M1 1 A 2
R32
3 D
1
4
由机构的运动情况连
杆2 受拉力。
2)当计及摩擦时,作用力应切于摩擦圆。
f0r
C B 2 M1 1 A
转动副B处:w21为顺时针方向
FR12切于摩擦圆上方。
运动副中摩擦力的确定(5/8)
(2)总反力方向的确定 1)根据力的平衡条件,确定不计摩擦 时总反力的方向; 2)计摩擦时的总反力应与摩擦圆相切; 3)总反力FR21 对轴心之矩的方向必与轴 颈1相对轴承2的相对角速度的方向相反。
运动副总反力判定准则
1、由力平衡条件,初步确定总反力方向(受 拉或压) 2、对于转动副有:FR21恒切于摩擦圆
3、对于转动副有:Mf 的方向与ω 12相反 对于移动副有:∠R21V12=(90°+φ)
例1:如图所示为一四杆机构。曲柄1为主动件,在力矩
M1的作用下沿w1方向转动,试求转动副 B及 C中作用力
的方向线的位置。 解: 1)在不计摩擦时,各转动副中的作用力应通过轴颈中心
构件 2为二力杆此二力
n
b)求使滑块沿斜面等速下滑所需水平力F’
根据平衡条件:G + F’R21 + F’ = 0
大小:√ 方向:
α+φ G
√
? √
? √
作图
得:
F’=Gtg(α-φ)
α F21 F’ 1 v α G 2 F’R21 α-φ n G
n FN
F’R21
φ
F’
若α>φ,则F’为阻力; 若α<φ,则F’方向相反,为驱动力
机械原理复习题第2章机构的结构分析
4
ω1 1
5 3
2
2
题9图
• • • •
解: F=3n-(2pL+pH)=3×4-2×6=0 或F=3n-(2pL+pH-p')-F′ =3×4-(2×7+0-2)-0=0 此方案有结构组成原理的错误。因为它 的自由度为零,不能运动。 • 修改方案如答图a、b所示。
• 例题2 图示为毛纺设备洗毛机中所采用的双 重偏心轮机构,偏心轮1可以在偏心轮2中相 对转动,偏心轮2可以在构件3的圆环中相对 转动。⑴试绘制其在图示位置时的机构运动 简图;⑵当以偏心盘1为原动件时,该机构是 否有确定的运动?
B 3 3 1 O A B
2
O΄
O 1 2 A
O΄
题2图
题答图
• 解 在绘制机构运动简图时,首先必须搞清 机构的组成及运动传递情况。在图示机构中, 偏心盘1为原动件,其与机架构成转动副A; 偏心盘1与偏心盘2构成转动副O;偏心盘2 与带环的构件3构成转动副O΄;构件3与机 架组成转动副B。 • 根据上述分析,再选定一适当的比例尺和视 图平面,并依次定出各转动副的位置。就不 难画出其机构运动简图,如答图所示。
O 1 A
O A 1 2
3 B 题4图
4
2
3
B
题答图
• 解 在绘制机构运动简图时,首先必须搞
清机构的组成及运动传递情况。在图示
机构中,偏心盘1为原动件,其与机架4
构成转动副O;偏心盘1与构件2构成转
动副A;构件2与滑块3构成转动副B;滑
块3与机架4组成移动副,其相对移动方
向沿OB方向。
• 根据上述分析,再选定一适当的比例尺和 视图平面,并依次定出各转动副的位置和 移动副导路的方位。就不难画出其机构运 动简图,如答图所示。 • 由于该机构具有3个活动构件、3个转动副 和1个移动副,没有高副,没有局部自由 度和虚约束,故机构的自由度为 O1 A • F=3n-(2pL+pH) OA 2 • =3×3-(2×4+0) 1 2 3B • =1
《机械原理自由度》课件
机械故障诊断
通过运动分析诊断机械故障的原因 和位置。
控制系统设计
利用运动分析结果设计控制系统的 参数和策略。
机构运动分析的实例
平面四杆机构的运动分析
01
通过解析法计算平面四杆机构的自由度,并分析其运动特性。
凸轮机构的运动分析
02
利用实验法测量凸轮机构的位移、速度和加速度,分析其运动
规律。
机器人臂关节的运动分析
03
通过数值法模拟机器人臂关节的运动行为,优化关节的设计参
数。
04
机构动力学分析
机构动力学的基本概念
机构动力学是研究机 械系统中机构运动及 其与力的关系的学科 。
机构动力学的基本概 念包括力、力矩、加 速度、速度和位移等 。
它涉及到系统的平衡 、运动规律、动态响 应等方面的内容。
机构动力学分析的Байду номын сангаас法
空间机构自由度计算
总结词
空间机构自由度计算是机械原理中一个复杂的概念,它涉及到机构在空间中的 运动自由度数。
详细描述
空间机构的自由度计算公式为F=6n-(3PL + Ph),其中n为活动构件数,PL为低 副数,Ph为高副数。与平面机构不同,空间机构需要考虑三个方向的自由度, 因此计算更为复杂。
特殊机构自由度计算
通过建立平面连杆机构的运动学和动力学模型,分析其运动规律 和动态响应。
凸轮机构的动力学分析
研究凸轮机构的动态行为,包括从动件的运动规律和受力情况等。
齿轮机构的动力学分析
分析齿轮机构的动态特性,如振动、冲击和噪声等,以提高齿轮传 动的平稳性和可靠性。
05
机构优化设计
机构优化设计的目标和方法
目标
机械原理平面机构的结构分析主要内容:

第一章平面机构的结构分析本章主要内容:1)平面机构运动简图的绘制2)平面机构自由度的计算及机构具有确定运动的条件3)机构的组成原理及结构分析1-1. 研究机构结构的目的(1) 探讨机构运动的可能性及其具有确定运动的条件(2) 将各种机构按结构加以分类,并按分类建立运动分析和动力分析的一般方法(3) 了解机构的组成原理(4) 绘制机构运动简图1-2. 运动副、运动链和机构一、运动副基本概念:1运动副:两构件直接接触形成的可动联接运动副1 运动副2 运动副2运动副元素:参与接触而构成运动副的点、线、面。
3自由度:构件所具有的独立运动的数目4约束:对独立运动所加的限制运动副的分类:1根据运动副的接触形式,运动副归为两类:1)低副:面接触的运动副。
如转动副、移动副。
2)高副:点或线接触的运动副。
如齿轮副、凸轮副。
2根据两构件的空间运动形式,可将运动副分为平面运动副和空间运动副。
1)平面运动副:组成运动副两构件间作相对平面运动,如转动副、移动副、凸轮副、齿轮副。
2)空间运动副:组成运动副两构件间作相对空间运动。
如螺旋副,球面副运动副的约束特点:具有两个约束而相对自由度等于一的平面运动副:转动副和移动副。
具有一个约束而相对自由度等于二的运动副:高副约束一个相对转动而保留两个相对移动的运动副是不可能存在的。
二、运动链•运动链:两个以上构件以运动副联接而成的系统。
•闭链:组成运动链的每个构件至少包括两个运动副元素,该运动链为封闭系统。
•开链:运动链中有的构件只包含一个运动副元素。
三、机构从运动链的角度,机构需具有下列特点:•1) 运动链中有机架•2) 各构件间有确定的运动1-3.平面机构运动简图一、机构运动简图的定义及作用说明机构各构件间相对运动关系的简单图形.机构运动简图是用规定的运动副符号及代表构件的线条来表示构件和运动副,并按一定比例表示各运动副的相对位置.•组成:线条和符号•符号:表示运动副二、机构运动简图的绘制1.运动副的表示符号:1)两构件构成转动副2)两构件构成移动副3)两构件组成平面高副用两构件接触点(线)附近的两段轮廓表示2.构件的表示方法将该构件上的运动副元素按其位置表示出来,再用简单的线条将这些运动副联接起来,就可表示这个构件。
机械原理 第二章-2相对运动图解、解析
1
3
aC1n c2 (c3) aC1t 4 D
A
4 P c1
一步减少未知数的个数。
n t k r aC2 aC3D aC3D aC1 aC2C1 aC2C1
2 3 l3
大小: 方向:
? 3l3
√ √
21vC 2C 1 ?
√ ∥AB
C→D ⊥CD
2) 取速度比例尺a , 作 加速度多边形。
P
c1
( 顺时针 )
2. 加速度分析:
1) 依据原理列矢量方程式 分析:
aC2 = aC1 + aC2C1
B
2 C akC2C1
当牵连点系(动参照系)为 转动时,存在科氏加速度。 3
D 4
ω1
1
1
c2 (c3)
r k aC2C1 aC2C1 aC2C1
科氏加速度
A
4 P c1
k r a 2 v
√
√
22lBC
C→B
?
⊥BC
b) 根据矢量方程式,取加速度比例尺
a
实际加速度
c´ 图示尺寸
m/
s2
p
mm
, 作矢量多边形。
c e b
p
极点
n
b
由加速度多边形得:
aC a pc m / s2
t 2 aCB l BC a nc l BC
同样,如果还需求出该构件上E 点的加速度 aE,则
pe 则代表 aE
由加速度多边形得:
p c´ n
aE pea
△b’c’e’ ~ △BCE , 叫 做
△BCE 的加速度影像,字 母的顺序方向一致。
机械原理第1讲结构分析
杆、轴构 件
固定构件
同一构件
两副构件
三副构件
3、机构的表示方法 机构运动简图:用规定符号和简单线条代表运动副和构件,并按一定比例表示各运动
副的相对位置。
机构示意图: 用规定符号和简单线条表示运动副和构件。
差别:机构运动简图需按比例表达出运动副间的相对位置,机构示意图仅能表达机构
的结构情况。
4、机构运动简图的绘制 1)分析机构,观察相对运动,数清所有构件的数目; 2)确定所有运动副的类型和数目; 3)选择合理的位置(即能充分反映机构的特性);
掌握 (3) 机架、原动件、从动件的联系与区别
(4) 运动副的分类与判断
(5) 运动副的表示方法、平面机构运动简图的绘制
熟练掌握 (1) 自由度的计算,机构确定运动的条件
三、重要名词解释 1、机构:能够实现预期的机械运动的各部件的基本组合体称为机构。 2、机器:根据某种使用要求设计,将一种或多种机构组合在一起,用以实现预定运动或用 来传递和交换能源、物料和信息的装置。 3、机械:机器与机构的总称。 4、原动件:驱动力作用的构件。 5、机架:凡本身固定不动的构件,或相对地球运动但固结于给定坐标参考系统并视为固定 不动的构件成为机架。 6、从动件:随着原动件运动而运动的构件。 7、运动副:凡两构件直接接触且能够保证有一定相对运动的联结成为运动副。 8、高副、低副:面接触的运动副称为高副,点或线接触的运动副称为低副。 9、自由度:在机构中,独立运动的数目或确定构件位置的独立参数的数目称为自由度。 10、约束:机构运动副中由于相对运动受限导致自由度减少的限制较约束 11、复合铰链:两个以上的构件在同一轴线上用转动副联接而成的结构。 12、局部自由度:机构中存在与否不影响整个机构运动规律的自由度。
机械原理课程设计 六杆机构分析完整版

机械原理课程设计说明书设计题目:六杆机构运动分析学院:工程机械学院专业:机械设计制造及其自动化班级:25041004设计者:25041004指导老师:张老师日期:2013年01月07日目录1.课程设计题目以及要求————————————————————32.运用辅助软件对结构进行结构分析———————————————43.数据收集以及作图———————————————————————114.总结————————————————————————————17六杆机构运动分析1、分析题目对如图5所示的六杆机构进行运动与动力分析,各构件长度、滑块5的质量G 、构件1转速n1、不均匀系数δ的已知数据如表5所示。
2、分析内容(1)对机构进行结构分析:(2)绘制滑块D 的运动线图(即位移、速度和加速度线图):(3)绘制构件3和4的运动线图(即角位移、角速度和角加速度线图): (4)绘制S4点的运动轨迹。
图5表5方案号L CDmmL ECmmymm L AB mm L CS4 mm n 1r/mi n1 975 360 50 250 400 23.52 975 325 50 225 350 33.53 9003005020030035(一)对机构进行结构分析选取方案三方案号L CDmm L ECmmymmL ABmmL CS4mmn 1r/mi n3 900 300 50 200 300 35对六杆机构进行运动分析:(1)原始数据的输入:(2)基本单元的选取及分析:(3)各点运动参数:(4)长度变化参数(5)各构件角运动参数:(二)滑块D的运动线图(位移-速度-加速度线图):(三)构件3的运动线图(角位移-角速度-角加速度线图):(四)构件4的运动线图(角位移-角速度-角加速度线图):(五)S4点的运动轨迹:(六)数据收集以及作图(1)滑块D 点x 、y 方向的运动参数如表6.1所示表6..1由上表可以得到D 点运动线图如图6.1所示图6.1位置 0123456789101112位 移X 1188.097 1187.376 1058.394 848.5281 680.2758 607.9142 606.0113 651.5314 734.6896 848.5281 980.0058 1105.089 1188.097 Y 0 0 0 0 0 0 0 0 0 0 0 0 0 速 度X 332.4289 -434.0533 7293.698 -1466.08 -831.5157 -222.7902 169.5616 457.6898 699.4701 879.648 933.0263 776.3062 332.4289 Y 0 0 0 0 0 0 0 0 0 0 0 0 0 加 速度X -4255.382 -6281.231 -4679198 2533.081 4920.073 3387.318 2265.425 1834.254 1530.378 911.9092 -264.7796 -2020.469 -4255.382 y 0(2)构件3的运动参数如表6.2所示表6.2位置0 1 2 3 4 5 6 7 8 9 10 11 12角位移φ14.03624 -16.10211 -50.93532 -90 230.9353 196.1021 165.9638 139.1066 114.1333 90 65.86674 40.89339 14.03624角速度ω-3.4496 -3.947138 -4.561904 -4.886933 -4.561904 -3.947138 -3.4496 -3.1416 -2.981412 -2.93216 -2.981412 -3.1416 -3.4496角加速度ɛ-2.789002 -4.130385 -3.972855 -6.092957 3.972855 4.130385 2.789002 1.582846 0.7038764 2.368942 -0.703876 -1.582846 -2.789002由上表得构件3的运动线图如图6.2所示图6.2(3)构件4的运动参数如表6.3所示表6.3位置0 1 2 3 4 5 6 7 8 9 10 11 12 φ-4.63715 5.304571 14.99956 19.471122 14.99956 5.304571 -4.63715 -12.60438 -17.70998 -19.47122 -17.70998 -12.60438 -4.63715 角位移ω 1.119198 1.269533 0.992103 1.253846 -0.9921031 -1.269533 -1.119198 -0.8111576 -0.4265414 -1.775216 0.4265414 0.1811158 1.119198 角速度ɛ 1.768468 0.031558 -4.448388 -8.443604 -4.448388 0.031558 1.768468 2.468482 2.88811092 3.039697 2.881092 2.468482 1.768468 角加速度由表6.3参数可得构件4的运动线图如图6.3所示图6.3(4)S4点x、y方向的运动参数如表6.4所示表6.4位置0 1 2 3 4 5 6 7 8 9 10 11 12位移X 590.0608 586.9459 478.8375 282.8427 100.7192 10.48452 7.975251 65.99134 163.1245 282.8427 408.4406 519.5487 590.0608 Y 48.50713 -55.47002 755.287 -200 -155.287 -55.47002 48.50713 130.9307 182.5194 200 182.5194 130.9307 48.50713速度X 278.1398 -363.6323 -1139.637 -1466.08 -985.5764 -293.2113 223.8507 563.8953 777.3222 879.648 855.1742 670.1007 278.1398 Y -669.3207 -758.4576 -574.98 -8.42273 574.98 758.4576 669.3207 474.9653 243.7962 7.905602 -243.7962 -474.9653 -669.3207加速度X -3592.063 -5316.593 -4799.736 844.3604 4920.073 4351.956 2928.744 1896.326 1108.512 303.9697 -686.6455 -1958.397 -3592.063 y -1118.368 70.54837 2730.937 4776.623 2730.937 70.54837 -1118.368 -1531.544 -1679.939 -1719.512 -1679.939 -1531.544 -1118.368(七)总结:六杆机构的运动分析相比课本上的平面四杆机构来说难度大些,而且是用辅助软件进行运动分析,这看起来似乎难度更大。
机械原理-机构的运动分析
3、加速度分析
aC aB aCB
a C a C aB a CB a CB
n t n t
a B 12l AB
F
1
1 A B 2 E C
大小 lCD32
?
→A
lCB22 C→B
? ⊥CB
·
G
3
方向 C→D ⊥CD
取极点p’ ,按比例尺a作加速度图
1
4
D
' aC a p 'c ' aCB a b 'cc´
思考题:
P44 3-1
作业:
P44 3-3、3-6、3-8(b)
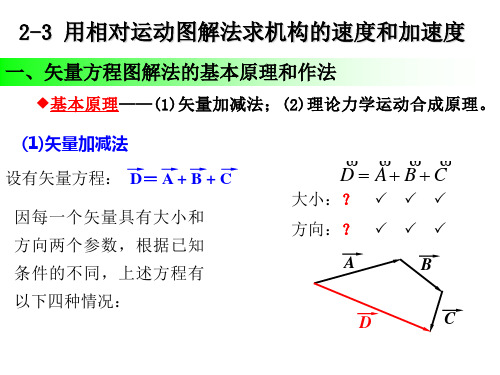
§3-3 用矢量方程图解法作机构的运动分析
一、矢量方程图解法的基本原理及作图法
1、基本原理 —— 相对运动原理 B(B1B2) 1
B
A
同一构件上两点间的运动关系
2
两构件重合点间的运动方程
vB v A vBA
aB a A aBA aA a
c´
aC a G e´
aCB
n2 ´ n2
p´
n3
aF
b´
加速度图分析小结: 1)p‘点代表所有构件上绝对加速度为零的影像点。 2)由p‘点指向图上任意点的矢量均代表机构图中对应点 的绝对加速度。 3)除 p′点之外,图中任意两个带“ ′”点间的连线 均代表机构图中对应两点间的相对加速度,其指向与加 速度的角标相反。 4)角加速度可用构件上任意两点之间的相对切向加速度 除于该两点之间的距离来求得,方向的判定采用矢量平 aCB b ' c ' 移法。 5)加速度影像原理:在加速度图上,同一构件上各点的 绝对加速度矢量终点构成的多边形与机构图中对应点构 成的多边形相似且角标字母绕行顺序相同。 6)加速度影像原理只能用于同一构件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
机械原理机构力分析
机械原理机构力分析是机械设计中的重要环节,通过对机构进行力学分析,可以确定各个零件之间的受力情况,为机械设计提供重要的参考依据。
本文将通过对机械原理机构力分析的研究,对其原理和基本步骤进行介绍,并通过实例说明其应用。
一、机械原理机构力分析的原理
机械原理机构力分析是基于力学的基本定律进行的分析过程。
通过分析机构零件之间的力学关系,可以得出受力情况,进而进行材料强度校核和结构设计。
主要包括以下几个方面的原理:
1. 受力平衡原理:机构中各个零件之间的力必须满足平衡条件,即合力为零。
通过建立受力平衡方程,可以求解出受力情况。
2. 受力传递原理:机械机构中的力是通过各个零件之间的接触和传递来实现的。
通过受力传递原理,可以分析出各个零件之间的受力情况。
3. 动力学原理:机械机构的力分析不仅仅局限于静力学,还需要考虑动力学因素。
通过动力学原理,可以分析机构在运动过程中产生的力和强度要求。
二、机械原理机构力分析的基本步骤
机械原理机构力分析的基本步骤是按照以下顺序进行的:
1. 确定受力分析的目标:明确分析的目标是什么,比如求解某个零
件的受力情况或者整个机构的受力平衡。
2. 分析机构的受力情况:根据受力平衡原理,建立受力平衡方程,
通过求解方程组,得到各个零件的受力情况。
3. 进行强度校核:根据受力分析结果,进行材料强度校核。
比如计
算零件的应力和应变,判断是否满足强度要求。
4. 设计机构的结构参数:根据受力分析结果和强度校核结果,进行
机构的结构参数设计。
比如确定零件的尺寸和形状,选择合适的材料。
5. 检验和验证:完成设计之后,进行力分析的检验和验证。
比如进
行有限元分析、力学试验等,确保设计的可行性和合理性。
三、机械原理机构力分析的应用实例
为了更好地理解机械原理机构力分析的应用,我们以一个简单的减
速机为例进行说明。
假设减速机由一对齿轮组成,齿轮的参数已知,我们需要进行力分
析以确定齿轮的受力情况和强度要求。
首先,根据受力平衡原理,建立齿轮的受力平衡方程。
然后,通过
求解方程组,得到齿轮的受力情况。
接下来,根据受力情况进行强度
校核,计算齿轮的应力和应变。
根据强度校核结果,我们可以优化齿轮的尺寸和形状,选择合适的
材料。
最后,进行力分析的检验和验证,确保设计的可靠性和合理性。
通过以上实例,我们可以看出机械原理机构力分析在机械设计中的
重要性。
通过合理的力学分析,可以确保设计的安全可靠性,并为材
料选择和结构设计提供参考依据。
综上所述,机械原理机构力分析是机械设计过程中不可或缺的环节。
在进行力分析时,需要按照一定的步骤进行,包括确定分析目标、分
析受力情况、进行强度校核、设计结构参数等。
通过合理应用机械原
理机构力分析,可以为机械设计提供指导和保障。