二轴倾转旋翼无人机的设计及实现
复合式无人机机翼设计及其自适应优化
parameter adaptive screening and design space adaptive updating of surrogate ̄based aerodynamic optimization techniques. A
parametric / spatial adaptive aerodynamic optimization platform was establishedꎬ which can improve the optimization
0.777
dihedral angle / ( °)
0
taper ratio
angle of sweepback at trailing edge / ( °)
0.5
0
在完成无人机机翼外形的初步设计后ꎬ 第 2 章
将对其进行参数寻优ꎬ 以得到更好的气动性能ꎮ 而
对无人机其余部件的设计将在后续工作中开展ꎬ 本
式 [7] 、 涵 道 式 [8] 、 尾 坐 式 [6] 、 复 合 式 等 [9] 几 种 类
合式无人机) 是同时具备固定翼和多旋翼的一种无
人机构型ꎬ 本文主要针对该种构型无人机的机翼气
动设计进行研究ꎮ
无人机的气动设计是一个反复迭代、 反复权衡
的过程ꎬ 气动优化设计在其中扮演着非常重要的角
收稿日期: 2023 ̄10 ̄22ꎻ 修回日期: 2023 ̄12 ̄26
第一作者简介: 张威(1994—) 男ꎬ 博士ꎬ 主要研究方向为气动设计、 气动优化等ꎮ E ̄mail: optz2023@ 163.com
通信作者简介: 栾悦(1994—) 女ꎬ 工程师ꎬ 主要研究方向为数据分析、 统计分析等ꎮ E ̄mail: optl2022@ 163.com
京东首发倾转旋翼无人机载重200kg?京东回应是媒体误报

京东首发倾转旋翼无人机载重200kg?京东回应是媒体误报8月29日,京东发布了首款可用于支、干线运输的倾转旋翼无人机VT1,其最大起飞重量超过200kg,这标志着京东无人机体系已经具备支、干线物流配送能力,并开始向着“打造三级无人机物流配送体系”的布局迈进。
不过随即有人对200kg的数据提出了质疑。
最大起飞重量200kg,是虚高吗?200kg的载重?VT1的参数一经发布便引来质疑,有人说参数看着虚高,而京东也没有发布实测视频。
对此,宇辰网记者询问了京东方面的人,他们表示,200kg的载重是部分媒体发布新闻时弄错了数据,是最大起飞重量超过200kg 而非载重,具体载重是多少?他们回应还没有标准数据。
续航也不是200小时,而是可以飞行200公里。
据介绍,京东自主研发的倾转旋翼无人机VT1机高1.13米,机长3.423米,翼展3.786米,采用油电混合动力,固定翼模态最大起飞重量超过200kg,可以飞行200公里以上,该机将主要应用在偏远地区的远程配送上。
倾转旋翼无人机VT1/图来源网络京东自主研发的无人机有不少,与以往机型不同,这款无人机除了长航时和超大载重这两处特殊外,还有“倾转旋翼”这一亮点。
说起来倾转旋翼也称不上什么新技术,早在上世纪50年代贝尔公司就研发了倾转旋翼军用机“鱼鹰”,这一技术属于军用技术外溢。
而在民用领域,倾转旋翼可以说是今年各无人机企业研发的新爆点,无距科技、深圳智航在今年都发布了倾转旋翼机。
倾转旋翼将固定翼飞机和直升机的优点融为一体,因而拥有不可比拟的优势,被形象地称为空中“混血儿”。
倾转旋翼无人机VT1/图来源网络VT1倾转旋翼机具有创新旋翼构型,在拥有固定翼飞机的机翼之外,在机身两侧还分别安装有可在水平与垂直位置之间转动切换的旋翼倾转系统组件,当飞机垂直起飞和着陆时,旋翼轴垂直于地面,呈横列式直升机飞行状态,可在空中悬停、前后飞行和侧飞。
而当倾转旋翼机飞升至一定高度后,旋翼轴可向前倾转90°角至水平位,旋翼即可当作固定翼飞机的拉力螺旋桨使用,能够以较高速度作远程飞行。
无人机概述—无人机的特点与分类
二、无人机的特点与分类
2.无人机的分类
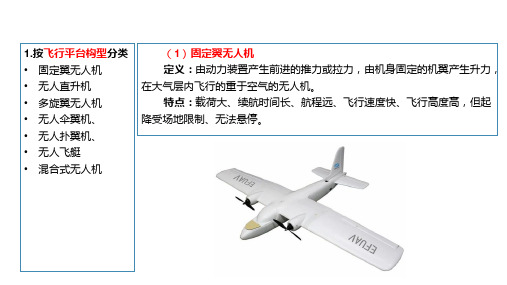
1.按飞行平台构型分类 • 固定翼无人机 • 无人直升机 • 多旋翼无人机 • 无人伞翼机、 • 无人扑翼机、 • 无人飞艇 • 混合式无人机
(6)无人飞艇 定义:是一种轻于空气、具有操纵和推进系统的无人机。分为硬式、半 硬式和软式三种类型。现代无人飞艇多为软式飞艇。 特点:最大的优势是滞空时间和静音性能,但也存在造价昂贵、速度过 低等问题。
二、无人机的特点与分类
2.无人机的分类
1.按飞行平台构型分类 • 固定翼无人机 • 无人直升机 • 多旋翼无人机 • 无人伞翼机、 • 无人扑翼机、 • 无人飞艇 • 混合式无人机
(7)混合式无人机 定义:指混合以上两种或多种平台构型的无人机。 特点:倾转旋翼无人机兼具固定翼和旋翼机的优点,具有垂直起降、空 中悬停和高速巡航飞行的能力。
二、无人机的特点与分类
2.无人机的分类
1.按飞行平台构型分类 • 固定翼无人机 • 无人直升机 • 多旋翼无人机 • 无人伞翼机、 • 无人扑翼机、 • 无人飞艇 • 混合式无人机
(4)无人伞翼机 定义:指以伞翼为升力面,以柔性伞翼代替刚性机翼的无人机。伞翼位 于全机的上方,多用纤维织物制成不透气柔性翼面,可收叠存放,张开后利 用迎面气流产生升力。 特点:体积小、速度慢、飞行高度低等。
二、无人机的特点与分类
2.无人机的分类
1.按飞行平台构型分类 • 固定翼无人机 • 无人直升机 • 多旋翼无人机 • 无人伞翼机、 • 无人扑翼机、 • 无人飞艇 • 混合式无人机
(1)固定翼无人机 定义:由动力装置产生前进的推力或拉力,由机身固定的机翼产生升力, 在大气层内飞行的重于空气的无人机。 特点:载荷大、续航时间长、航程远、飞行速度快、飞行高度高,但无人机的分类
倾转四旋翼无人机直升机模式控制方法

倾转四旋翼无人机直升机模式控制方法作者:孙立志来源:《无人机》2019年第03期随着无人机技术日趋先进,融合无人直升机和固定翼无人机优点的无人机型应运而生。
其中,倾转四旋翼无人机兼具可垂直起降、载重量大及巡航速度高等特点的无,是极具发展潜力的新型无人机种。
采用经典力学理论,对倾转四旋翼无人机进行了力学分析,建立了直升机模式下的模型,得出了其质心运动的动力学方程;确定了在直升机模式下的姿态和位置控制方法,设计了倾转四旋翼无人机各个控制回路的控制结构和控制律。
倾转四旋翼无人机具有可以倾转的旋翼,同时有水平固定机翼,因此在巡航速度、有效载荷上更加突出,在军事和商业方面具有广阔的应用前景,是未来无人无人机发展的一个重要方向。
倾转旋翼机的控制方式主要有两种,一种是直升机控制模式,另一种是固定翼无人机控制模式。
其飞行过程如下,无人机首先在直升机模式下垂直起飞达到一定高度;接着进入过渡飞行阶段,短舱发生倾转,旋翼回转面由平行于机身纵轴逐渐倾转至垂直于机身纵轴,在该阶段,旋翼逐渐转换为提供推力,而升力则由固定翼提供;完成旋翼倾转后,无人机进入平飞模式,以固定翼模式巡航飞行。
在垂直起降的过程中可以按照直升机控制方法来控制,通过改变旋翼的拉力矢量来改变飞行状态;在平飞阶段主要采用固定翼无人机控制模式,通过控制气动舵面的来控制飞行状态。
倾转四旋翼无人机力学模型坐标轴系的定义为便于对倾转四旋翼无人机进行力学分析,需要分别建立机体坐标系和地理坐标系如图1所示。
式中,θ为俯仰角,φ为横滚角,ψ为偏航角。
倾转四旋翼无人机直升机模式下的力学建模利用经典力学对倾转四旋翼无人机进行力学分析,进行以下假设以简化分析:(1)将倾转四旋翼无人机视为刚体,且质量是常数;(2)假设地面为惯性参考系;(3)忽略地球曲率,视地面为平面;(4)假设重力加速度不随飞行高度变化而变化。
由于在直升机模式下前飞速度较慢,气动舵对无人机的受力影响很小,故无人机主要受到旋翼拉力T和重力G的作用。
第2章无人机组成及飞行原理
固定翼无人机的结构组成
5、动力装置
目前民用领域主要适用往复式活塞发动机和无刷电动机。无刷电动机多用于多旋翼。 往复式活塞发动机是一种内燃机,由气缸、活塞、连杆、曲轴、机匣和汽化器等组
成。它的工作原理是燃料与空气的混合气在气缸内爆燃,产生的高温高压气体对活塞做 功,推动活塞运动,并通过连杆带动曲轴转动,将活塞的往复直线运动转换为曲轴的旋 转运动。曲轴的转动带动螺旋桨旋转,驱动无人机飞行。整个工作过程包括吸气、压缩、 做功和排气四个环节,不断循环往复地进行,使发动机连续运转。
标称空载KV值 电机KV值定义为“转速/伏特”,意思为输入电压增加1V,无刷电机空转转速增加的
转速值。例如,1000kv电机,外加1v电压,电机空转时每分钟转1000转,外加2v电压, 电机空转就2000转了。单从KV值,不可以评价电机的好坏,因为不同KV值有不同的适 用不同尺寸的浆绕线匝数多的,KV值低,最高输出电流小,但扭力大,上大尺寸的浆; 绕线匝数少的,KV值高,最高输出电流大,但扭力小,上小尺寸的浆。
固定翼无人机的结构组成
3、尾翼
尾翼是用来配平、稳定和操作固定翼无人机飞行的部件,通常包括垂直尾翼(垂尾)和 水平尾翼(平尾)两部分。
水平尾翼由水平安定面和升降舵组成,通常情况下水平安定面是固定的,升降舵是可动的。 垂直尾翼包括固定的垂直安定面和可动的方向舵。方向舵用于控制飞机的横向运动,升降 舵用于控制飞机的纵向运动。 尾翼的形状也是多种多样的,选择尾翼形状,首先要考虑的是能获得最大效能的空气动力, 并在保证强度的前提下,尽量使结构简单、质量轻。
多旋翼无人机的构成
5、动力电源—电池
电池是将化学能转化成电能的装置。在整个飞行系统中,电池作为能源储备,为整个 动力系统和其他电子设备提供电力来源。目前在多旋翼飞行器上,一般采用普通锂电池 或者智能锂电池等。
无人机组成系统基本要点

无人机组成系统基本要点无人机组成系统基本要点飞行器是由人类制造、能飞离地面、在大气层内或大气层外空间飞行的机械飞行器。
在大气层内飞行的称为航空器,在太空飞行的称为航天器。
那么,下面是店铺为大家整理的无人机组成系统基本要点,欢迎大家阅读浏览。
一、飞行器飞行器是由人类制造、能飞离地面、在大气层内或大气层外空间飞行的机械飞行器。
在大气层内飞行的称为航空器,在太空飞行的称为航天器。
无人机系统飞行器平台“简单”的五个方面:(1)无需生命支撑系统,平台规模尺度小,更加简化。
(2)无需考虑过载、耐久等人为因素,平台更加专用化。
(3)为降低采购价格,相对于有人挤在一定程度上放宽了可靠性指标。
(4)对场地、地面保障等依赖减小。
(5)训练可大量依赖于模拟器,节省飞行器实际使用寿命。
二、航空器平台1.固定翼固定翼航空器平台即日常生活中提到的“飞机”,是指由动力装置产生前进的推理或拉力,由机体上固定的机翼产生升力,在大气层内飞行的重于空气的航空器。
无人机固定翼平台固定翼结构包含机身、机翼、尾翼、起落架和发动机等。
机身:机身的主要功用是装在设备、燃料和武器等,同事它是其他结构部件的安装基础,用以将尾翼、机翼、起落架等连接成一个整体。
固定翼飞行器机身结构机翼:机翼是固定翼飞行器产生升力的部件,机翼后缘有可操作地点活动面,一半靠外侧的叫作副翼,用于控制飞机的滚转运动,靠内侧的则是襟翼,用于增加起飞着陆阶段的升力。
固定翼飞行器机翼结构尾翼:尾翼是用来配平、稳定和操纵固定翼飞行器飞行的部件,通常包括垂直尾翼(垂尾)和水平尾翼(平尾)两部分。
垂直尾翼由固定的垂直安定面和安装在其后部的方向舵组成;水平尾翼由固定的水平安定面和安装在其后部的升降舵组成,一些型号的飞机升降舵由全动式水平尾翼代替。
方向舵用于控制飞机的横向运动,升降舵用于控制飞机的纵向运动。
起落架:起落架是用来支撑飞行器停放、滑行、起飞和着陆滑跑的部件,一般由支柱、缓冲器、刹车装置、机轮和收放机构组成。
三角翼型复合无人机技术与应用优势分析
三角翼型复合无人机技术与应用优势分析摘要:作为一款集力量和操控能力于一身的且可以执行任务的新式航空器,无人机因其多变的使用模式而在各个应用领域中拥有着广泛的使用率。
本文首先阐述了复合无人机技术的概念,介绍了目前复合无人机的类型及优缺点,然后从外形、特点等方面重点介绍了三角翼型复合无人机,分析了其在实景三维建模技术、巡检方面、环境监测方面的应用优势,并对未来的应用进行了展望。
关键词:三角翼;复合无人机;应用;优势引言无人机航空遥感信息技术作为空间数据收集的主要技术手段,具备耐久性强、图像即时传送、全高风险域监测、成本低、灵敏度强等优势,也是对卫星遥感信息技术和无人机航空遥感信息技术的有力补充,已应用于军队和民用等领域。
而由于飞行器总体设计科技近一百年的进展,虽然固定翼飞机在大多数实际使用场合中的配置都已接近完善,但其垂直飞行与着陆能力的发展却仍步履蹒跚。
因此,需要对复合翼无人机技术进行更多的研究和创新。
1复合无人机技术概述1.1复合无人机技术介绍固定翼无人机拥有飞行速度快、航行高度高、航行时长的优势。
而旋转翼无人机拥有垂直起落、悬停速度和灵活性高的优势。
而复合翼无人机完美结合了固定翼与旋转翼无人机的优点。
1.2复合无人机分类及特点1.2.1多旋翼固定翼复合构型垂直起降固定翼布局易于实现。
可在现有固定翼平台上增加多旋翼动力部件,增强机翼扭转强度。
控制的优点是控制系统相对简单。
在最简单的情况下,固定翼和多旋翼飞行控制系统可以实现正常飞行。
另外一项不会受到过多注意的好处是向前推动螺旋桨的效率。
多旋翼桨在典型工作下的来流速率与固定翼桨完全不一样,所以翼形和桨距在设计上也具有很大区别。
而一般的工业无人机都采用了固定式齿距桨,因此可以在多旋翼模式下高效工作。
而固定式翼桨由于使用了多旋翼模式,因此老化效率也更低。
因此,在此配置中,多旋翼螺旋桨仅在多旋翼模式下工作,而固定翼桨仅在固定翼模式下工作,这对于螺旋桨的高效应用来说是一个不小的优势。
无人机课程 ppt课件
Lorem ipsum dolor sit amet, consectetur adipisicing elit , sed do eiusmod
PPT课件
31
美国手与日本手
Lorem ipsum dolor sit amet, consectetur adipisicing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
十九秒内飞行了二百六十米。 1908.09.17 美国的塞普里金乘坐威尔伯.莱特驾驶的飞机坠落,成为第一次
飞机事故的牺牲者,威尔伯.莱特身负重伤。 1910.10.31 法国的费勃成功地解决了水上飞机的起降问题,制成世界上第一
架水上飞机。
PPT课件
4
航空技术发展
1911.02.08 世界第一次运载航空邮件。法制“索默”双翼飞机携带6500封信 由印度的阿拉哈巴特到达五英里外的奈尼。
一种利用前飞时的相对气流吹动旋 翼自转以产生升力的旋翼航空器。 它的前进力由发动机带动螺旋桨直 接提供。
PPT课件
11
扑翼
指机翼能像鸟和昆虫翅膀那样上下扑动的 重于空气的航空器。又称振翼机。扑动的 机翼不仅产生升力,还产生向前的推动力 。中国春秋时期就有人试图制造能飞的木 鸟。15世纪意大利的达芬奇绘制过扑翼机 的草图。
PPT课件
16
多轴飞行器简介
多轴飞行器近年来无人机中的新兴力量,有多个旋翼来悬空和推进飞行 。和固定翼飞机不同,它通过旋翼的旋转使飞机升空。它的多个旋翼大 小相同,分布位置对称。
PPT课件
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
- 4 -高 新 技 术0 引言倾转旋翼机作为一种新型旋翼飞行器,是将直升机及固定翼无人机相结合而产生的一种新概念航空器,该飞行器的起降是依靠飞行器的主轴倾转,带动飞行器的发动机一同发生倾转,实现飞行器由垂直起降向水平飞行阶段的过渡。
其有效融合了直升机和固定翼无人机各自的优点,既拥有直升机垂直起降和空中悬停的能力,又拥有固定翼无人机高速巡航飞行的能力,航程比直升机更远,航速更高,以及具有比固定翼无人机更高的机动性和更小的起降区域。
1 二轴倾转旋翼无人机设计倾转旋翼无人机主要向2个方面发展:一是依靠对称分布在翼尖两侧的发动机吊舱进行倾转改变姿态,二是将发动机固定在机翼上,旋转机翼进行姿态的转变。
如图1所示,该文设计的二轴倾转旋翼无人机动力系统将由2个无刷电机组成的吊舱分布在翼尖两侧,在机载飞控系统的控制下,通过采集多个传感器的实时信号,经过内部的STM32处理器进行处理,改变两侧吊舱的旋转角度,从而实现飞机垂直起降、固定翼巡航。
该文设计的二轴倾转旋翼无人机在垂直姿态下采用电机差速控制方向,相比于直升机的桨距控制,其有着结构简易可靠、后期维护方便、姿态转换过程稳定等优点。
图1 二轴倾转旋翼无人机1.1 翼型选择机翼作为飞机的重要组成部分,承担着为飞机提供升力的任务。
机翼主要由翼肋构成,不同的翼肋有着不同的翼型,不同的翼型其作用也有所不同。
为了满足该文设计的无人机在进行姿态转换时不掉高度且机体稳定不抖动的要求,需选择一种具有适中升阻比且飞行性能稳定的翼型,并对攻角对翼型气动特性的影响进行研究。
1.2 攻角对翼型气动特性的影响该文通过在Profili 翼型库中对多种翼型进行选择,最终选取5种不同类型的翼型进行比较。
由图2可知,5种翼型的升阻比总趋势为先增后减,在攻角为4.5°左右时,Clark V 翼型升阻比最高,在此状态下提供的升力最大,飞行性能更佳,但随着攻角的变化,Clark V 翼型升阻比变化趋势偏大,从稳定性而言,升阻比的急剧变化不利于飞机的飞行稳定。
Aquila 翼型升阻比变化趋势较缓,飞行性能更稳定,并且升阻比较高,能提供可观的升力,因此选取Aquila 翼型为该文设计的无人机的翼型。
1.3 倾转机构与机翼设计该文设计的倾转旋翼无人机的倾转机构以发动机吊舱对称分布在翼尖两侧,通过改变吊舱旋转角度实现垂直飞行和水平飞行。
在垂直飞行过程中,无人机竖直向上的推重比需大于1,在水平飞行过程中,无人机的推重比需维持在0.4左右,因此无人机在过渡飞行时,推力的急剧变化对倾转机构结构强度与机翼的连接结构有着很大的挑战。
利用榫卯结构对吊舱及连接结构进行设计,吊舱与机翼采用外径12 mm、内径8 mm 的3K 碳纤维圆管连接。
图3为吊舱与左侧机翼的三维建模,机翼翼展977 mm,弦长240 mm,吊舱长205 mm,宽47 mm,高43 mm。
在保持吊舱转换时飞机飞行姿态稳定的情况下,最大程度地增加机翼翼展,使飞机发挥出更优的性能。
1.4 驱动模块 倾转旋翼无人机在进行姿态转换时,对电机及控制发动机吊舱角度的舵机的响应速度有着很高的要求。
通过测试,测得无刷电机Sunnysky X2814型的响应速度优于其他无刷电机,使用11.1 V-5 200 mAh-35C 的锂聚合物电池,并搭配13×8E 桨,单个电机的最大拉力可达1 700 g 左右,可在飞机垂直飞行时为其提供足够的推力。
数字舵机在测试时响应速二轴倾转旋翼无人机的设计及实现洪智杰 钟小华 李广湖 谢江涛 彭振根(广东白云学院,广东 广州 510450)摘 要:该文结合多旋翼无人机和固定翼无人机的优点设计了二轴倾转旋翼无人机,这是一款摒弃传统设计观念的新型无人机。
采用碳纤维复合材料以及巴尔沙木材,在最大程度减重的同时又保证了机体的强度。
通过机载STM32处理器引导输出不同宽度的PWM 波脉控制舵机带动发动机吊舱实现倾转。
在垂直飞行姿态下,其最大推重比可达2,在水平飞行姿态下,其续航时间为52 min。
其凭借着大推重比和高续航时间,可在山区、灾区等复杂环境中进行勘察、巡航等作业。
关键词:飞行器;倾转旋翼无人机;垂直起降中图分类号:V279 文献标志码:A基金项目:大学生创新创业项目(201810822011)。
- 5 -高 新 技 术度优于模拟舵机,测试时受旋转发动机吊舱时扭力大等因素的影响,塑料齿轮舵机经常发生少齿、滑齿现象,因此采用了大扭力数字金属齿舵机,其脉冲宽度为500 us~2 500 us,工作频率为1 500 us/330 Hz。
工作电压为4.8 V 时,转动速度为0.16 sec/60°,扭矩为14.2 kg/ cm。
通过独立的UBEC 开关降压将电源11.1 V 电压降至4.8 V 供舵机使用,并通过STM32处理器将输出主频由168 MHz 经GPIO 引脚转换为330 Hz 的PWM 控制。
1.5 尾翼设计该文设计的倾转旋翼无人机尾翼采用两侧立尾和分段式平尾布局。
在平尾翼肋中增加了2条碳纤维圆管,增强了尾翼整体的抗扭性,并且使其在安装时可以更好地定位,减小了手工误差。
在测试强度足够时对尾翼进行最大程度的镂空以减轻其重量,避免强度过剩。
相比于其他尾翼布局,此布局提升了飞机的稳定性,并且安装难度较小。
尾翼主要参数见表1。
表1尾翼设计参数尾翼技术指标尾翼翼型NACA 0010尾翼展弦比3垂直尾翼尾容量1.5水平尾翼尾容量0.44垂直尾翼面积(dm2)170.64水平尾翼面积(dm2)35.482 二轴倾转旋翼无人机测试对该文设计的二轴倾转旋翼无人机进行了倾转机构强度、垂直飞行和水平飞行的飞行性能2个方面的测试。
2.1 倾转机构强度实验利用SolidWorks Simulation 对无人机主要受力的倾转结构做静应力分析,实验结果如图4所示。
实验为测试机构抗扭性及结构强度对机构施加载荷为10 N 的扭力,由图4可以看出,受到的静应力大约为1.291 e+005 N/m 2,而巴尔沙轻木屈服力为2.000 e+007 N/m 2。
证明了此结构有足够的抗扭性及结构强度。
图4主要受力倾转机构静应力分析2.2 垂直飞行和水平飞行的飞行性能测试使用5 200 mAh 电池对该文设计的无人机、自行DIY 的多旋翼无人机和固定翼无人机及市面上较为突出的2种机型:DJI Phantom 4 Pro V2.0(多旋翼无人机)、ZOHD Nano Talon“小小胖子”(固定翼无人机)进行测试比较(测试机型均无负重载荷),实验结果见表2。
图3 吊舱与左侧机翼结构示意图图2 不同翼型下升阻比(C L /C D )随攻角(alpha)变化曲线C L /C DC L /C D- 6 -高 新 技 术0 引言农村供水目前主要采用“水井-水塔”这种独立供水形式,一方面多数地区的人们仍采用人力启动抽水机的方式补充水塔的水量,这将会带来许多不必要的麻烦,另一方面少数地区的人们多采用小型PLC 控制的供水系统,但是该种系统存在功能单一、造价高昂并且自动化程度低等不足,因此目前该种供水系统在全国范围内并没有得到普及,其节水的优点并没有得到很好的发挥。
因此为了使供水系统更加智能化、功能多元化以及普遍化,该文提出了一种基于ARM 内核的光伏式水塔智能监测系统。
1 监测系统总体框架设计该水塔智能监测控制系统主要是利用传感器采集水塔和水井数据,并通过电磁阀和电机对水塔进行控制。
如图1所示,该系统主要由6个部分组成,包括主控显示模块、水塔监测控制模块、无线通信模块、水井监测控制模块、微信公众号平台模块和电源模块。
该水塔智能监测控制系统的各主要模块的功能如下。
1.1 主控显示模块采用ATK-4.3'TFTLCD 液晶显示屏电路,采用NT35510驱动。
1.2 水塔监测控制模块该模块由STM32下位机1与电磁阀组、传感器检测电路组成,负责采集水塔的水位、温度、pH 值、浑浊度等数据,并对电磁阀组进行控制。
1.3 无线通信模块运用芯片的SPI 通信,结合nRF24L01模块实现主机与子机间的无线通信,把子机检测到的水塔和水井的水位、水温和各项开关状态信息及时反馈给主机。
1.4 水井监测控制模块水位检测采用超声波传感器模块,当水井水位过低时,及时向主机发送信息,防止水泵干抽;下位机2接受主机光伏式智能水塔监测控制系统的设计与实现涂顺广 宋武兴 李康铭 伍健涛(广东白云学院机电工程学院,广东 广州 510450)摘 要:为了解决广大农村地区的水塔自动化程度低、容易发生缺水和溢水现象、浪费人力电力资源等问题,该文设计了基于STM32的光伏式水塔智能监测控制系统。
通过ZigBee 无线网络接收传感器信号,利用NXP 公司推出的STM32微控制器作为主机和子机的控制核心,使监测系统可以实时地对接收到的传感器信号和信息进行运算处理,实现对水位、水质、水压和水温的实时监测,同时具有增压、清污、防干抽和防漏水的功能。
关键词:光伏式智能水塔;供水系统;双电源;水质监测;自动清污中图分类号:TP36 文献标志码:A从表2可以看出,该文设计的二轴倾转旋翼无人机在使用5 200 mAh 电池的情况下,无论是在续航时间还是速度方面都优于自行Diy 的无人机。
相比于DJI Phantom 4 Pro V2.0在速度上略差一点,但续航时间相同。
对于ZOHD Nano Talon“小小胖子”无论是在续航还是速度方面,该文设计的无人机都是优于它的。
3 结语该文设计的二轴倾转旋翼无人机可以在垂直飞行姿态下自动锁定飞机舵面,避免飞机产生抖动和偏移。
通过机载STM32处理器对电机和倾转舵机的混合控制以实现无人机在垂直飞行姿态下的平飞、侧飞等动作。
在成功转换为水平飞行姿态后解锁飞机舵面,锁定倾转舵机,进行巡航飞行。
对于倾转旋翼无人机倾转机构普遍存在强度不足问题,该文利用碳纤维复合材料进行加强,从而保证了倾转机构的稳定性和可靠性。
参考文献[1]刘春明,罗继业.NASA 大型民用倾转旋翼机进展研究[J].民用飞机设计与研究,2010(4):1-5,50.[2]钟建卫,李林,吕偿,等.多用途固定翼无人机及其远程控制系统研究[J].中国新技术新产品,2018(3):28-30.[3]李国勤,孙丹,艾延廷,等.翼型气动性能数值分析[J].沈阳航空航天大学学报,2017,34(6):27-32,39.[4]栗莉,綦龙,罗帅,等.雷诺数对超临界翼型气动性能的影响[J].教练机,2017(2):39-45.[5]许景辉,马贺,周建峰,等.倾转三旋翼垂直起降无人机悬停姿态控制[J].农业机械学报,2018,49(10):16-22.[6]王延奎,秦叶,黄茜.双垂尾飞行器偏航力矩非线性变化分析[J].航空科学技术,2018,29(7):44-47.表2飞行性能比较机型电池容量(mAh)续航时间(min)最大速度( km/h)该文设计无人机(垂直飞行姿态)5 2003065Diy多旋翼无人机5 2001450DJI Phantom 4 Pro V2.05 8703072该文设计无人机(水平飞行姿态)5 2005296Diy固定翼无人机5 2001064ZOHD Nano Talon小小胖子5 2004990。