伺服电机参数说明
伺服 调相 参数

伺服调相参数伺服调相参数指的是伺服系统中的调相功能,它是控制伺服电机转速和位置的重要参数之一。
调相参数的设置对于伺服系统的性能和稳定性具有重要影响。
本文将介绍伺服调相参数的基本概念和作用。
一、调相参数的基本概念伺服调相参数是指在伺服系统中用来调整电机输出信号与输入信号之间的相位差的参数。
伺服电机的输出信号是通过根据输入信号来控制电机转速和位置的。
调相参数的设置会影响电机的响应速度、稳定性和精度等性能指标。
常见的调相参数有比例增益、积分时间和微分时间等。
二、调相参数的作用1. 比例增益:比例增益是用来调整电机输出信号与输入信号之间的比例关系的参数。
比例增益越大,电机的响应速度越快,但容易产生振荡。
比例增益越小,电机的响应速度越慢,但稳定性较好。
合理设置比例增益可以使电机在快速响应的同时保持稳定。
2. 积分时间:积分时间是用来调整电机输出信号与输入信号之间积分关系的参数。
积分时间越长,电机的响应速度越慢,但稳定性较好。
积分时间越短,电机的响应速度越快,但容易产生超调和振荡。
合理设置积分时间可以使电机在稳定性和响应速度之间找到一个平衡点。
3. 微分时间:微分时间是用来调整电机输出信号与输入信号之间微分关系的参数。
微分时间越长,电机的响应速度越快,但容易产生振荡。
微分时间越短,电机的响应速度越慢,但稳定性较好。
合理设置微分时间可以使电机在快速响应和稳定性之间取得平衡。
三、调相参数的设置方法调相参数的设置需要根据具体的伺服系统和应用需求来确定。
一般来说,可以通过以下步骤来进行调相参数的设置:1. 首先,根据伺服系统的性能要求和应用需求,确定合适的比例增益范围、积分时间范围和微分时间范围。
2. 其次,根据实际情况,选择一个初始的调相参数值。
3. 然后,通过实验和观察伺服系统的响应情况,逐步调整调相参数的数值,直到达到满意的性能指标。
4. 最后,对调相参数进行稳定性测试和性能验证,确保伺服系统在各种工况下都能正常运行。
FANUC伺服电机中文参数说明
内容来自:文档资料共享网更多"FANUC伺服电机中文参数说明"相关资料请点击这里FANUC AC SERVO MOTOR #*s series FANUC AC SPINDLE MOTOR #* seriesFANUC SERVO AMPLIF IER #* series维修说明书B-65325CM/01本说明书的任何内容不得以任何方式复制。
所有参数指标和设计可随时修改,恕不另行通知。
我们试图在本说明书中描述尽可能多的情况。
然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。
因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-65325CM/01为了安全使用为了使您更安全的使用本公司的伺服电机、主轴电机以及伺服放大器(βi SVM βi SVPM),本公司已将相应的注意事项写入“为了安全使用”中。
请在使用电机及放大器之前仔细阅读“为了安全使用”。
另外,有关电机和放大器的各项功能请参阅本篇,请在完全理解的基础上正确使用。
还有,对于“为了安全使用”中没有记录的事项,原则上是禁止操作的。
有关此方面的事项请在操作前预先与本公司进行联系。
目录1.1 警告、注意、注释................................................................... .........................s-2 1.2 FANUC AC SERVO MOTOR βis series,FANUC AC SPINDLE MOTOR βi series.........................................................s-3 1.2.1 1.2.2 1.2.3 1.3.1警告................................................................... ...............................s-3 注意................................................................... ...............................s-5 注释................................................................... ...............................s-6 安装时的警告及注意................................................................... ....s-8警告................................................................... .........................s-8 注意................................................................... .........................s-9 注释................................................................... .......................s-10 警告................................................................... .......................s-11 注意................................................................... .......................s-12 警告................................................................... .......................s-13 注意................................................................... .......................s-14 注释................................................................... .......................s-141.3 FANUC SERVO AMPLIFIER βi series............................................................s-81.3.21.3.3试运行时的警告及注意.................................................................s-11维护时的警告及注意................................................................... ..s-13为了安全使用B-65325CM/011.1警告、注意、注释“为了安全使用”中为了保证操作人员人身安全以及防止机床损坏的有关安全的注意事项,并根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来描述。
伺服电机 说明书
第六章............................................................................................... 61
错误报警及处理 ................................................................................................ 61 6.1 报警一览表 .............................................................................................. 61 6.2 报警处理方法 .......................................................................................... 62
第七章............................................................................................... 65
通电运行 ............................................................................................................ 65 7.1 电源连接 .................................................................................................. 65 7.2 试运行 ...................................................................................................... 67 7.3 调整 .......................................................................................................... 69
伺服电机常用参数设置

伺服电机常用参数设置
1. 鞍点误差:指电机安装完成后,转子相对静止状态下实际旋转角度,角度误差一般控制在10°以内。
2. 死区:指控制电路采用抗突响应等措施,以免出现电机驱动器输入端的小幅度信号波动,而导致控制电机不断颠簸的现象。
3. 功率负载百分比:判断电机使用条件的关键参数之一。
它可以查出负载的变化程度,负载变化大会加剧摩擦、韧性变化,缩短电机的使用寿命。
4.额定转速:电机额定转速每秒相当于多少圈数,配合电机减速比例进行设定。
5. 额定转矩:转矩,力矩,它是电机在原动体受力的唯一指标,它是定义电机运转功率大小依据,其值越大,功率越大,达成要求的转速便越快。
AC伺服电机参数

FANUC AC伺服电机( a系列)参数说明书万邦数控设备有限公司秦皇岛秦皇岛万邦数控设备有限公司技术部一、a系列的参数调整说明:0-系统包括 0-T 0-C 0-M i-系统包括 0i 16i 18i 20i 21i1、伺服的调整画面0-系统 若伺服调整画面不出现,则更改下列参数.NO. 389.0=0 既SVS=0 (显示伺服画面)0i 系统 若伺服调整画面不出现,则更改下列参数.NO.3111.0=0 既SVS=0 (显示伺服画面)注: 参数更参数更改好后改好后,CNC 需要断电再通电(伺服画面伺服画面)) Servo adjustment 01000 N00001, Func bit 00000000 9, Alarm 1 000000002, Loop gain 3000 10, Alarm 2 000000003, Tuning st 0 11, Alarm 3 000000004, Set period 0 12, Alarm 4 000000005, Int.gain 113 13, Alarm 5 000000006, Prop,gain —1015 14, Loop gain 30007, Filter 0 15, Pos error 55558, Velog gain 100 16, Current(%) 517, Speed (rom) 1000(1)伺服设定画面各项对应的参数好列表注﹡=1表示X轴 ﹡=2 表示Z轴(2)2、电机停止时的振荡(1、)若有低频波动,增加负载惯量比NO.8﹡21NO.2021 负载惯量设定值为电动机出现振动请安的值得70%以下(2、)将负载惯量比恢复到初始值,不断地将低速度环积分增益(PK1V)每次将低量为20%。
NO.8﹡43NO.2043 速度环的积分增益(PK1V)设定值≥标准值*0.3积分增益将低太多时,会使运动时的响应和刚性变坏。
(3)不断增加速度环的比例增益(PK2V)每次增加量为20%。
安川伺服电机说明书
YSKAWA安川∑Ⅱ数字交流伺服 安装调试说明书 (2004.7版本) 目 录 1. 安川连接示意图 2. 通电前的检查 3. 通电时的检查 4. 安川伺服驱动器的参数设定 5. 安川伺服驱动器的伺服增益调整 1. 安川连接示意图 重要提示: 由于电机和编码器是同轴连接,因此,在电机轴端安装带轮或连轴器时,请勿敲击。
否则,会损坏编码器。
(此种 情况,不在安川的保修范围!) 2. 通电前的检查 1) 确认安川伺服驱动器和电机插头的连接,相序是否正确: A.SGMGH电机,不带刹车制动器的连接: 伺服驱动器 电机插头 U A V B W C 接地 D B.SGMGH电机 0.5KW-4.4KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 刹车电源 E 刹车电源 F 刹车电源为: DC90V (无极性) C. SGMGH电机5.5KW-15KW,带刹车制动器电机的连接: 伺服驱动器 电机插头 U A V B W C 接地 D 电机制动器插头 刹车电源 A 刹车电源 B 刹车电源为: DC90V (无极性) 注: 1.相序错误,通电时会发生电机抖动现象。
2.相线与“接地”短路,会发生过载报警。
2)确认安川伺服驱动器CN2和伺服电机编码器联接正确, 接插件螺丝拧紧。
3)确认伺服驱动器CN1和数控系统的插头联接正确, 接插件螺丝拧紧。
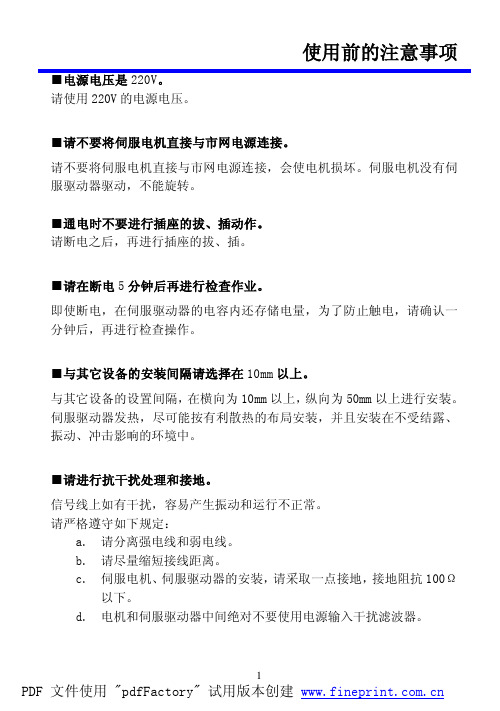
3.通电时的检查 1) 确认三相主电路输入电压在200V-220V范围内。
建议用户选用380V/200V的三相伺服变压器。
2)确认单相辅助电路输入电压在200V-220V范围内。
4.安川伺服驱动器的参数设定 安川伺服驱动器参数,操作方法如下:(1)参数密码设定; (2)用户参数和功能参数的设定; 1)参数密码设定 为防止任意修改参数,将“Fn010”辅助功能参数,设定: ・ “0000” 允许改写 PnXXX 的用户参数,及部分辅助功能“FnXXX”参数。
发那科FANCI αi伺服电机型号参数

Motor Model αiF 1/5000αiF 2/5000αiF 4/4000αiF 8/3000αiF 12/3000Rated output(kw)0.50.75 1.4 1.63Stalling torque(Nm)124812Max.speed(r/min)50005000500030003000Rotor intertia(kgm 2)0.000310.000530.00140.00260.0062Driver(αi SV)80Specification A06B-0202-Bxyz A06B-0205-Bxyz A06B-0223-Bxyz A06B-0227-Bxyz A06B-0243-BxyzMotor Model αiF 22/3000αiF 30/3000αiF 40/3000Rated output(kw)476Stalling torque(Nm)223038Max.speed(r/min)300030003000Rotor intertia(kgm 2)0.0120.0170.022Driver(αi SV)80SpecificationA06B-0247-BxyzA06B-0253-BxyzA06B-0257-BxyzNote2:Straight shaft with key way 3:Taper shaft,with break A06B-0257-Bxyzx :0:Taper shaft 1:Straight shaft1: with Fan (only for aiF 40) 2: with High-Torque Brake *14:Straight shaft,with break5:Straight shaft with key way,with break y :0: standardz :0:Pulsecoder aiA1000 1:Pulsecoder aiI1000 2:Pulsecoder aiA160003: with High-Torque Brake , with Fan *1 *1): "x" should be from 3 to 5αiF 伺服电机简明规格参数20401609533000αiF 40/3000i with fan0.022FANUC伺服电机按驱动电压可分为高压电机(400VHV)和低压电机(200V);按产品系列可以分αi系列和βiS系列两大类;这两大系列伺服电机又依次可以分为αiF、αiS、αiF(HV)、αiS(HV)和βiS、βiS(HV)等子类。
伺服电机规格书

伺服电机规格书一、引言在现代工业生产中,伺服电机作为一种高精度、高性能的电机,广泛应用于各种机械设备中。
伺服电机的规格书是指对伺服电机的技术参数、性能指标、外观尺寸等进行详细描述和说明的文档。
本文将对伺服电机规格书进行全面、详细、完整和深入的探讨。
二、伺服电机规格书的重要性伺服电机规格书是伺服电机的重要技术文件,对于购买、安装、使用和维护伺服电机具有重要的参考价值和指导意义。
通过规格书,用户可以了解到伺服电机的技术参数和性能指标,从而选择适合自己需求的产品。
同时,规格书中还包含了伺服电机的外观尺寸、安装方式、接线方式等详细信息,为用户提供了使用和维护伺服电机的参考依据。
三、伺服电机规格书的主要内容伺服电机规格书的主要内容包括以下几个方面:1. 技术参数技术参数是伺服电机规格书的核心内容,它包括了伺服电机的额定功率、额定电压、额定转速、额定转矩等重要参数。
这些参数直接决定了伺服电机的性能和适用范围,用户在选择伺服电机时需要根据自己的需求和应用场景来确定这些参数。
2. 性能指标性能指标是伺服电机规格书中的另一个重要内容,它包括了伺服电机的速度响应、静态误差、动态误差、抗扰性能等指标。
这些指标反映了伺服电机的控制性能和精度,用户在选择伺服电机时需要根据自己的控制需求来确定这些指标。
3. 外观尺寸外观尺寸是伺服电机规格书中的一项重要信息,它包括了伺服电机的安装尺寸、外形尺寸、重量等信息。
这些信息对于用户选择适合的安装方式和布局具有重要的参考价值。
4. 安装方式安装方式是伺服电机规格书中的一项重要内容,它包括了伺服电机的安装方式、安装位置、安装要求等信息。
这些信息对于用户正确安装伺服电机、保证其正常运行具有重要的指导意义。
5. 接线方式接线方式是伺服电机规格书中的一项重要信息,它包括了伺服电机的电源接线、信号接线等信息。
这些信息对于用户正确接线伺服电机、保证其正常工作具有重要的参考价值。
四、伺服电机规格书的编写要求伺服电机规格书的编写应符合以下要求:1. 准确性伺服电机规格书的编写应准确无误地描述伺服电机的技术参数、性能指标、外观尺寸等信息,避免出现错误和模糊不清的表述。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服电机参数说明
伺服电机是一种将电脉冲信号转换为机械转动的设备。
它具有高精度、高响应速度、低噪声、低振动和稳定性好等特点,广泛应用于自动化控制
系统中。
伺服电机的参数是指其性能和规格,包括额定功率、额定转速、额定
电压、额定电流、额定转矩、角度误差、速度误差、保持转矩以及惯量等。
1.额定功率:伺服电机的额定功率是指在额定工况下,电机能够输出
的最大功率。
通常以瓦特(W)为单位表示。
2. 额定转速:伺服电机的额定转速是指在额定工况下,电机旋转的
速度。
通常以转/分钟(rpm)或角度/秒(deg/s)为单位表示。
3.额定电压:伺服电机的额定电压是指电机运行时所需的电压。
通常
以伏特(V)为单位表示。
4.额定电流:伺服电机的额定电流是指电机在额定工况下所需要的电流。
通常以安培(A)为单位表示。
5.额定转矩:伺服电机的额定转矩是指电机在额定工况下所能提供的
最大转矩。
通常以牛顿米(Nm)为单位表示。
6.角度误差:伺服电机的角度误差是指电机实际输出角度与期望角度
之间的差值。
通常以度(°)为单位表示。
7. 速度误差:伺服电机的速度误差是指实际输出速度与期望速度之
间的差值。
通常以转/分钟(rpm)或角度/秒(deg/s)为单位表示。
8.保持转矩:伺服电机的保持转矩是指电机在没有负载转动时所能保
持的转矩。
通常以牛顿米(Nm)为单位表示。
9. 惯量:伺服电机的惯量是指电机转动时所具有的惯性。
它是伺服
系统动态响应速度的重要参数。
通常以千克平方米(kg·m²)为单位表示。
除了以上参数外,还有一些其他重要的参数需要注意,例如电机的功
率因素、峰值转矩、加速度和减速时间等。
这些参数对于伺服电机的性能
和应用场景也有很大影响,需要根据具体需求进行选择和调整。
总之,伺服电机的参数是描述其性能和规格的重要指标,能够帮助用
户选择合适的电机并合理配置控制系统。
在实际应用中,根据具体的控制
要求和机械环境,可以根据这些参数进行调整和优化,以获得更好的运动
控制性能。