镜面反射现场的多基线体视
注册测绘师资格考试模拟试卷集
可编辑修改 精品文档 2015年注册测绘师资格考试
模拟试卷集分析汇总
测绘综合能力部分 综合试题一: 单项选择:得分必须大于等于60。 题型 A:17 B:24 C:23 D:16 多项选择:得分必须大于等于20。 题型 二个答案:5 三个答案:7 四个答案:8 主要考点: 1、工程测量规范、摄影测量规范、房产测绘及水准测量规范等规范内容关于点位精度的要求。 2、牢记模拟两课的词语含义。 3、GPS数据处理相关参数计算。 4、大地高、正常高与正高的定义。 5、陀螺经纬仪测定的方位角是施工控制网坐标系方位角。 6、房屋测绘的相关知识。房屋现状变更测量与权属变更测量的主要内容。全部(或一半)建筑面积计算的主要内容。 7、摄影比例尺的计算公式:摄影比例尺=摄影主距/相对航高。 8、当视线长度大于100M时,应根据视线长度和仪器设备等情况,选用规范规定的相应方法进行一、二等跨河水准测量。 9、正常高指地面上任意一点沿正常重力线(或垂线)至似大地水准面的距离。似大地水准面是正常高的起算面。可编辑修改 精品文档 正高指地面上任意一点沿正常重力线(或垂线)至大地水准面的距离。大地水
准面是正高的起算面。 大地高指地面点沿法线到参考椭球面的距离。参考椭球面是大地高的起算面。 10、加密重力测量测线中,当仪器静放3小时以上时,必须在静放前后读数,按静态零漂计算。相对重力测量时测定两点的重力差值。 11、陀螺经纬仪测定的方位角是施工控制网坐标系方位角。 12、市政工程施工设计阶段需要的地形图比例尺一般为1:500~1:1000。工程控制网的质量准则包括灵敏度准则、精度准则、费用准则。 13、地形图上位于鞍部任意点的高程是组成鞍部的一对山谷等高线的高程加上半个等高距。 14、房屋现状变更测量的是地名、门牌号的变更。房屋权属变更测量的是房屋买卖、交换、继承等;土地使用权界的调整,包括合并、分割、截弯取直;他项权利范围的变化和注销。 15、用于权属登记的房产测量成果备案时,房地产行政主管部门需审核的是界址点的准确性、面积测算的方法和依据、施测单位的在资格。 16、现行《数字航摄仪检定规程》规定,检定场应满足不少于2条航线,每条航线最小曝光12次。 17、数字正射影像图的地面分辨率一般应不大于0.0001M,其中M为成图比例尺。 18、根据摄像特征差异可以识别和区分不同的地物,能够达到识别和区分地物目的典型影像特征在遥感影像解译中称为影像的解译标志。 19、DOM影像采用的投影是正射投影。数字航摄影像的分辨率通常是指每个像素实地尺寸。 20、航空摄影测量外业控制点编号时,字母P代表平面点、G代表高程点、N代表平可编辑修改 精品文档 高点。
这就是用定焦距平行光管法测定_图文(精)
如图5-5,当慧差较小时,星点象
中央亮斑与衍与衍射环之间将有
小量的偏心,且衍射环粗细亮暗不
均匀,甚至散成许多小斑点,如图
5-5a、b、c,当慧差较大时,星点
象将呈现明显的慧星形状,即有一
图5-3
明亮的头部和一个延伸的尾部,如
图5-5d,e。
4、象散星点图象
象散的星点图特征是:当象散较小时,中央亮斑还很圆,但第一亮环将出现十字形暗线,
w tg f y o
o
= ¢ 2 ; w ¢ = ¢
¢ tg f y
2用作图成象的方法很容易得出:w =w ¢,因此可以得到
o o
f y ¢ 2 = f
y ¢ ¢ 2即: o
o
y y
f f ¢ ¢ = ¢ (1-1
这就是用定焦距平行光管法测定焦距所用的公式。其中o
f ¢是平光管物镜的焦距,是已知的。利用公式(1-1计算出被测透镜的焦距f ¢。
后和焦点处,应是中心为园亮点,其衍射环是均匀的同心圆环,而且是前后对称的。如图
5-3a所示;
1、色差星点图象的观察:
对于没有校正过色差的光学系统,由于星点发出各种不同波长的光线,经光学系统后,
分别会聚在光轴不同位置上,则通过显微镜观察,可以看到色彩非常鲜艳的彩色园环等图象。
根据观察到的彩色图象;就可定性
光学系统鉴别率的测量就是依据以上原理。做成各种形式鉴别率板做为目标物放在物平面位置。大眼通过放大镜或显微镜观察或在被测物镜象平面上的分辨率板的象,以刚能分辨开两线之间的最小距离σ(毫米的倒数为被测物镜的目视鉴别率。各种分辨率板的图样如图6-2所示,本实验用图4-2中的a为透射式分辨率板。
光学原理及实验装置如图6-3所示;光源均匀照亮平行光管物镜焦面上的透射式分辨率板。平行光管发出的平行光,通过被测物镜后成象在其象面上,用显微镜观察分辨率板的图象。
计算机视觉三维测量与建模-参考答案汇总 第1--8章

第一章大数据财务决策概论一、数字影像的概念?常见的数字影像的类型有哪些?物理世界的物体针对不同频段的电磁波具有不同的辐射、吸收和透射特性。
通常数字影像的成像过程是传感器将接收到的辐射、反射或透射的电磁波,从光信号转换为电信号,再转换为数字信号的过程。
彩色影像、灰度影像、二值影像、深度图影像、多光谱影像、伪彩色影像。
二、摄影几何的意义以及摄影几何数学表达的优点有哪些?射影几何学也叫投影几何学,在经典几何学中,射影几何处于一个特殊的地位,通过它可以把其他一些几何学联系起来。
在射影几何学中,把无穷远点视为“理想点”。
欧氏直线再加上一个无穷点就是射影几何中的直线,如果一个平面内的两条直线平行,那么这两条直线就交于这两条直线共有的无穷远点。
使用射影几何进行数学表达的优点包括:(1)提供了一个统一的框架来表示几何图元,如点、线和平面;(2)可以在无穷远处以直接的方式操作点、线和平面;(3)为许多几何操作(如构造、交集和变换)提供了线性表示方式。
三、为了描述光学成像的过程,通常需要引入几种坐标系,分别进行说明。
1.世界坐标系为了描述观测场景的空间位置属性,第一个需要建立的基本的三维坐标系是世界坐标系,也被称为全局坐标系。
2.像空间辅助坐标系第二类坐标系是像空间辅助坐标系,也被称为相机空间坐标系。
它类似于摄影测量学中的像空间辅助坐标系,是以摄像机为分析基准的坐标系,也是从三维空间转换到二维空间的一个桥梁。
3.像平面坐标系第三个重要的坐标系是像平面坐标系。
摄像机对三维场景拍照,属于透视投影变换,是将观测点的坐标值从三维空间转换到二维空间的射影变换。
四、基于不同的测量原理,主动式扫描仪系统可以分为几类?1.飞行时间扫描仪TOF类型的扫描仪通过测量从发射端发出的辐射波到目标表面的往返时间来计算目标表面点的距离。
2.相移扫描仪相移扫描仪利用正弦调制的强度随时间变换的激光束进行测量。
通过观测发射信号和反射信号的相位差,计算目标与传感器之间的往返距离。
(2021年整理)《测量学》考试重点
(完整)《测量学》考试重点编辑整理:尊敬的读者朋友们:这里是精品文档编辑中心,本文档内容是由我和我的同事精心编辑整理后发布的,发布之前我们对文中内容进行仔细校对,但是难免会有疏漏的地方,但是任然希望((完整)《测量学》考试重点)的内容能够给您的工作和学习带来便利。
同时也真诚的希望收到您的建议和反馈,这将是我们进步的源泉,前进的动力。
本文可编辑可修改,如果觉得对您有帮助请收藏以便随时查阅,最后祝您生活愉快业绩进步,以下为(完整)《测量学》考试重点的全部内容。
《测量学》考试重点一、名词解释1.水准面:水准面是受地球重力影响形成的,它的特点是其面上任意一点的铅垂线都垂直与改点的曲面。
2.大地体:由地球水准面所包围的地球形体,它代表了地球的自然形状和大小。
3.参考椭球面:与大地水准面非常接近的能用数学方程表示的旋转椭球体相应的规则曲面。
4.绝对高程:地面点沿铅垂线至大地水准面的距离。
5.相对高程:假定一个水准面作为高程起算面,地面点到假定水准面的垂直距离.6.高差:地面两点间的绝对高程或相对高程之差。
7.高程测量:确定地面点高程的测量工作。
8.视准轴:物镜光心和十字丝焦点的连线。
9.望远镜放大率:眼睛由望远镜观察虚像所张的夹角与直接观察远处的实物所张的角的比值。
10.高差法:根据高差推算待定点高程的方法。
11.水平角:指相交于一点的两方向线在水平面上的竖直投影所形成的夹角.12.竖直角:指在同一竖直平面内,观测实现与水平线之间的夹角.13.测回法:测角的基本方法,用于两个目标方向之间水平角的测量。
14.竖盘读数指标差:正镜观测时,实际的始读数为X0左=900+X,倒镜观测时,时读数为X0右=2700+X,其差值X称为竖盘指标差。
15.直线定线:当地面两点之间的距离大于钢尺的一个尺段时,就需要在直线方向上标定若干个分段点,这项工作称为直线定线。
16.电磁波测距仪:用电磁波(或光波或微波)作为载体,传输测距信号,以测量两点间距离的一种仪器。
工程光学基础教程 习题答案(完整)
第一章 几何光学基本定律1. 已知真空中的光速c =3810⨯m/s ,求光在水(n=1.333)、冕牌玻璃(n=1.51)、火石玻璃(n=1.65)、加拿大树胶(n=1.526)、金刚石(n=2.417)等介质中的光速。
解:则当光在水中,n=1.333时,v=2.25 m/s, 当光在冕牌玻璃中,n=1.51时,v=1.99 m/s, 当光在火石玻璃中,n =1.65时,v=1.82 m/s , 当光在加拿大树胶中,n=1.526时,v=1.97 m/s ,当光在金刚石中,n=2.417时,v=1.24 m/s 。
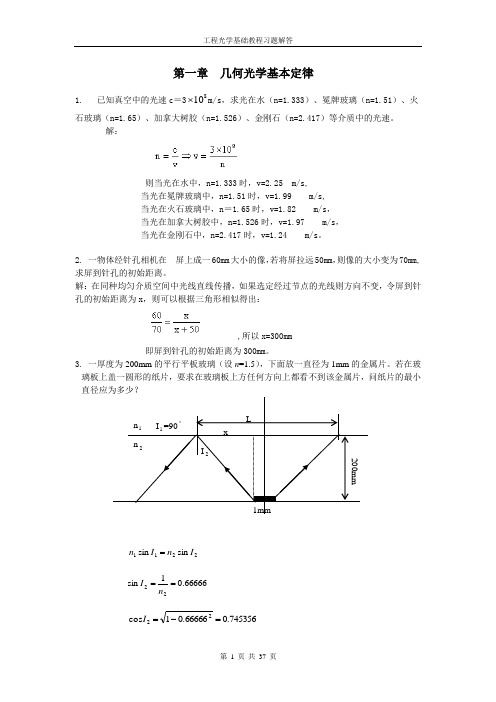
2. 一物体经针孔相机在 屏上成一60mm 大小的像,若将屏拉远50mm ,则像的大小变为70mm,求屏到针孔的初始距离。
解:在同种均匀介质空间中光线直线传播,如果选定经过节点的光线则方向不变,令屏到针孔的初始距离为x ,则可以根据三角形相似得出:,所以x=300mm即屏到针孔的初始距离为300mm 。
3. 一厚度为200mm 的平行平板玻璃(设n =1.5),下面放一直径为1mm 的金属片。
若在玻璃板上盖一圆形的纸片,要求在玻璃板上方任何方向上都看不到该金属片,问纸片的最小直径应为多少?2211sin sin I n I n = 66666.01sin 22==n I745356.066666.01cos 22=-=I1mm I 1=90︒n 1 n 2200mmL I 2 x88.178745356.066666.0*200*2002===tgI xmm x L 77.35812=+=4.光纤芯的折射率为1n ,包层的折射率为2n ,光纤所在介质的折射率为0n ,求光纤的数值孔径(即10sin I n ,其中1I 为光在光纤内能以全反射方式传播时在入射端面的最大入射角)。
解:位于光纤入射端面,满足由空气入射到光纤芯中,应用折射定律则有: n 0sinI 1=n 2sinI 2 (1)而当光束由光纤芯入射到包层的时候满足全反射,使得光束可以在光纤内传播,则有:(2)由(1)式和(2)式联立得到n 0 .5. 一束平行细光束入射到一半径r=30mm 、折射率n=1.5的玻璃球上,求其会聚点的位置。
2023年影像科技师准入考试试题
2023年影像科技师准入考试试题您的姓名: [填空题] *_________________________________一、单项选择题:(每题2分,共80分)1、磁体间的观察窗用铜网的目的是() [单选题] *A、将屏蔽间接地B、射频屏蔽(正确答案)C、美观D、磁屏蔽E、房子反光便于观察里面的情况2、弥散加权成像简称() [单选题] *A、DTIB、DWI(正确答案)C、PWID、MRSE、MRU3、Propeller技术又称为() [单选题] *A、滑车技术B、滑环技术C、螺旋桨技术(正确答案)D、辐射技术E、螺纹技术4、关于层厚的叙述,正确的是() [单选题] *A、层厚越厚信号越弱B、层厚越厚信噪比越低C、层厚越厚越不易产生部分容积效应D、层厚越薄空间分辨率越低E、层厚取决于射频的带宽及梯度磁场的上升时间(正确答案)5、填充K空间中央区域的MR信号(K空间线)主要决定() [单选题] *A、图像的解剖细节B、图像的边缘C、图像的轮廓D、图像的对比(正确答案)E、图像的信噪比6、SE序列T2加权像中TE值最佳选择为() [单选题] *A、10~15msB、20~40msC、80~120ms(正确答案)D、200~250msE、260~300ms7、MRI诊断垂体微腺瘤的最佳扫描方法是() [单选题] *A、常规冠状位平扫描B、常规冠状位增强扫描C、冠状位动态增强扫描(正确答案)D、矢状位动态增强扫描E、横轴位动态增强扫描8、不影响快速自旋回波序列扫描时间的是() [单选题] *A、TE(正确答案)B、TRC、采集层数D、相位编码数E、回波链长度9、SE序列中180°射频脉冲的目的是() [单选题] *A、激发质子产生不规则运动B、产生相位离散C、产生梯度磁场D、产生主磁场E、产生相位重(正确答案)10、为减少扫描时间,将正方形FOV改成矩形,正确的方法是() [单选题] *A、减少频率编码数B、减少层厚C、减少相位方向FOV(正确答案)D、减少频率方向FOVE、减少相位编码数11、有关甲状腺扫描技术的描述,不正确的是() [单选题] *A、层厚4~5mmB、仅扫矢状位(正确答案)C、T2加脂肪抑制技术D、扫横断位、冠状位E、冠状位频率编码方向取上下向12、关于预饱和技术的叙述,错误的是() [单选题] *A、预饱和技术可用于各种脉冲序列B、预饱和技术可以抑制各种运动伪影C、饱和带越窄,越靠近感兴趣区,抑制伪影效果越差(正确答案)D、饱和带越多,抑制伪影效果越好E、增加饱和带,但要减少扫描层数或增加扫描时间13、关于信号平均次数的叙述,错误的是() [单选题] *A、信号平均次数指数据采集的重复次数B、信号噪声比的大小与信号平均次数的平方根成正比C、信号平均次数从1次提高到4次时,信号噪声比可提高到2倍D、增加信号平均次数会增加扫描时间E、扫描时间与信号平均次数成反比(正确答案)14、T1加权成像是指这种成像方法重点突出组织() [单选题] *A、横向弛豫差别,而尽量减少组织纵向弛豫、组织的质子含量等对图像的影响B、质子含量差别,而尽量减少组织横向弛豫、纵向弛豫等对图像的影响C、纵向弛豫差别,而尽量减少组织横向弛豫、组织的质子含量等对图像的影响(正确答案)D、纵向弛豫、组织的质子含量差别,而尽量减少组织横向弛豫对图像的影响E、横向弛豫、组织的质子含量差别,而尽量减少组织纵向弛豫等对图像的影响15、关于气体的MR信号特征描述,正确的是() [单选题] *A、T1WI有信号B、T2WI低信号区C、质子密度趋于零(正确答案)D、在有些脉冲序列中,改变TR会改变信号E、在有些脉冲序列中,改变TE会改变信号16、心血管在磁场中诱导出的生物电位在哪处最高() [单选题] *A、肺动脉(正确答案)B、肺静脉C、主动脉D、降主动脉E、腹主动脉17、鼻咽部横轴位扫描范围是() [单选题] *A、上自垂体,下至软腭下缘(正确答案)B、上自胼胝体,下至枕骨大孔C、上自垂体,下至枕骨大孔D、上自胼胝体,下至软腭下缘E、上自垂体,下至延髓下缘18、磁共振现象于哪一年被发现() [单选题] *A、1946年(正确答案)B、1952年C、1963年D、1971年E、1978年19、磁化准备快速梯度回波脉冲序列一般不用于() [单选题] *A、颅脑高分辨三维成像B、MRV(正确答案)C、心肌灌注D、心脏冠脉成像E、腹部成像20、哪一选项是磁共振波谱的基础() [单选题] *A、化学位移(正确答案)B、K空间轨迹C、磁化准备D、原子核自旋特性E、纵向弛豫21、不属于X线质的表示方法的是() [单选题] *A、半值层B、电子的加速电压C、靶物质(正确答案)D、软射线与硬射线E、有效能量22、成年男性甲状软骨后方正对() [单选题] *A、第2颈椎B、第3颈椎C、第4颈椎D、第5颈椎(正确答案)E、第6颈椎23、关于X线信息影像的形成与传递的叙述,错误的是() [单选题] *A、X线管射出的X线强度分布视为是均匀的B、X线透过被照体后就形成了X线信息影像C、被照体是信息源D、X线是信息源(正确答案)E、可见光透过照片后在视网膜形成视觉影像24、常规情况下无需肺部高分辨扫描的疾病是() [单选题] *A、粟粒性肺结核B、矽肺C、过敏性肺炎D、小叶性肺炎(正确答案)E、支气管扩张25、关于高千伏X线摄影优缺点的描述,正确的是() [单选题] *A、可以获得高对比度影像B、会增加患者辐射剂量C、减少散射线,提高图像质量D、会降低图像显示层次E、缩短曝光时间,抑制运动模糊(正确答案)26、关于呼吸门控的描述,不正确的是() [单选题] *A、包括呼吸触发和呼吸补偿B、呼吸补偿技术需呼吸规律C、呼吸触发属于前瞻性门控D、呼吸触发一般以吸气末为触发点(正确答案)E、呼吸触发多用于快速自旋回波T2序列27、CTA血管造影错误的是() [单选题] *A、部分容积效应明显B、外周动脉注入造影剂(正确答案)C、MPR成像D、MIP成像E、VR成像28、关于血流形式的影响因素,不正确的是() [单选题] *A、血流是以层流为主还是以湍流为主受雷诺数(NR)影响B、雷诺数(NR)代表惯性力和黏滞度的比率C、NR<2000,血流趋于湍流;NR>3000,血流趋于层流(正确答案)D、管径大、血流快、低黏度容易导致湍流的产生E、血管狭窄、血管壁粗糙等容易导致湍流的产生29、冠状动脉钙化积分提示冠状动脉明显狭窄可能性极大的是() [单选题] *A、积分为0B、积分在0~250C、积分大于250(正确答案)D、积分大于400E、积分大于60030、关于标识X线的发生过程的叙述,错误的是() [单选题] *A、标识X线可以单独获得(正确答案)B、高速电子将内层电子击脱C、高能态的外层电子向内壳层跃迁D、跃迁电子多余能量辐射出来形成X线E、标识X线的波长与靶物质的原子结构密切相关31、正确的摄影步骤是() [单选题] *A、能量→检测→信号→图像B、信号→能量→检测→图像C、能量→检测→图像→信号D、能量→信号→检测→图像(正确答案)E、能量→图像→检测→信号32、关于增感屏的作用,错误的是() [单选题] *A、增感屏可以大大减小患者受照剂量,有利于防护B、增感屏分为中速屏和高速屏,高速屏所需剂量更小C、在胶片特性曲线中,直线部的γ值屏片组合优于无屏胶片D、使用增感屏可以提高成像系统的MTF值(正确答案)E、使用高速屏会增加图像的量子斑点33、关于螺旋CT探测器的叙述,错误的是() [单选题] *A、探测器阵列分为等宽型和不等宽型B、等宽型探测器使用宽层厚时间隙较少,射线利用率较高(正确答案)C、不等宽型探测器使用宽层厚时间隙较少,射线利用率较高D、等宽型探测器使用宽层厚时间隙较多,射线利用率较低E、不等宽型探测器组合不如等宽型探测器灵活34、成像板(IP)是CR成像的核心部件,负责接收X线,并进行信息转换。
1+X测绘地理信息智能应用考试题
1+X测绘地理信息智能应用考试题一、单选题(共100题,每题1分,共100分)1、我国基本比例尺地形图采用()分幅方法A、正方形B、矩形C、梯形D、经纬度正确答案:C答案解析:1、地形图分幅方法分为两类,一类是按经纬线分幅的梯形分幅法(又称为国际分幅),另一类是按坐标格网分幅的矩形分幅法。
2、前者用于国家基本图的分幅,后者则用于城市或工程建设大比例尺地形图的分幅。
2、地形变化较为平缓的情况大多数用那种方法计算土方量A、三角网法B、方格网法C、平均高程法D、插值法正确答案:B3、飞机在摄影瞬间相对于实际地面的高度称为:A、绝对航高B、相对航高C、真实航高D、摄影航高正确答案:C答案解析:飞机在摄影瞬间相对于实际地面的高度称为真实航高4、全球四大卫星导航系统中具有一定通信能力的卫星导航系统是()A、GalileoB、GPSC、BDS正确答案:C5、使用全站仪测量横断面时精度较高的一种方法是()A、在中桩处架好仪器对中整平后瞄准垂直于路线的横断面方向,测量出每个变化点处距离和高差B、任意一点架仪器,直接测量出每个变化点的坐标和高程C、使用全站仪自带的对边测量功能,测量出所需数据正确答案:A6、以下哪个软件不包含土石方计算功能?A、飞时达B、ArcGISC、SouthMapD、CASS正确答案:B7、下列哪一项不是DTM法数据采集方式:A、根据坐标文件B、根据图面高程点C、根据图面三角网D、根据道路设计参数正确答案:D答案解析:D项是断面法所用8、北斗卫星导航系统分为中圆轨道、倾斜地球同步轨道和()三种轨道类型A、太阳同步轨道B、地球静止轨道C、极轨道正确答案:B9、倾角计必须将传感器固定在()或()上,以便准确反映灾害体变化A、灾害体表面,观测墩B、灾害体表面,水泥台C、灾害体内部,观测墩正确答案:B答案解析:倾角计必须将传感器固定在灾害体表面或水泥台上,以便准能准确反映灾害体变化情况10、采用三角网法测量土方量,需要用全站仪根据地形来采集()A、断面线B、高程点C、方格点正确答案:B答案解析:三角网法测量土方量,只要根据地形来采集高程点就可以了。
初级放射医学技师专业实践能力模拟题17
初级放射医学技师专业实践能力模拟题17一、以下每一道题下面有A、B、C、D、E五个备选答案。
请从中选择一个最佳答案。
1. 被照体矢状面与胶片平行的摄影体位有A.胸部正位B.心脏右前斜位C.梅氏位D.腕关节正位E.胸部侧卧侧位答案:E[解答] 胸部侧卧侧位时,患者侧卧,矢状面平行于胶片;其余位置矢状面均不平行于胶片。
2. 有关听眶线的描述,正确的是A.外耳孔与眼眶下缘的连线B.外耳孔与眼外眦的连线C.外耳孔与鼻前棘的连线D.外耳孔与眉弓的连线E.外耳孔与鼻尖的连线答案:A[解答] 听眶线为外耳孔上缘与眶下缘的连线。
3. 以下组合错误的是A.听眶线——ABLB.听眦线——OMBLC.听眉线——SNLE.人类生物学基线——ABL答案:C[解答] 听眉线简写应为:SML。
4. 侧卧后前位是指A.仰卧于摄影床上,X线从腹侧射入,背侧射出B.侧卧于摄影床上,X线从右侧或左侧射入,左侧或右侧射出C.仰卧于摄影床上,X线从背侧射入,腹侧射出D.侧卧于摄影床上,X线从背侧射入,腹侧射出E.侧卧于摄影床上,X线从腹侧射入,背侧射出答案:D[解答] 侧卧后前位是指患者在侧卧的体位下进行后前位摄影,即:侧卧于摄影床上,X线从背侧射入,腹侧射出。
5. 与剑突末端至肚脐连线中点位于同一平面的是A.第12胸椎B.第1腰椎C.第2腰椎D.第3腰椎E.第4腰椎答案:B[解答] 与剑突末端至肚脐连线中点同一平面的是第1腰椎,此高度约相当于双侧肾门水平,是肾脏正位摄影位置的中心线入射点。
6. 鞍区肿瘤、垂体瘤患者应首选的摄影位置是A.头颅侧位B.头颅汤氏位D.切线位E.轴位答案:A[解答] 鞍区在头颅侧位上显示最为清晰。
7. 内听道病变通常选用的摄影位置是A.柯氏位、瓦氏位B.头颅侧位、后前位C.汤氏位、许氏位、梅氏位D.斯氏位、颅底位、汤氏位E.伦氏位、头颅前后位答案:D[解答] 斯氏位是显示内听道的最佳体位,颅底位、汤氏位显示也较清楚。
大学测量学课后练习题答案
第一章 绪论何谓水准面?何谓大地水准面?它在测量工作中的作用是什么?答:静止的水面称为水准面,水准面是受地球重力影响而形成的,是一个处处与重力方向垂直的连续曲面,并且是一个重力场的等位面。
与平均海水面吻合并向大陆、岛屿内延伸而形成的闭合曲面,称为大地水准面。
大地水准面是测量工作的基准面。
何谓绝对高程和相对高程?何谓高差?答:某点沿铅垂线方向到大地水准面的距离,称为该点的绝对高程或海拔。
假定一个水准面作为高程基准面,地面点至假定水准面的铅垂距离,称为相对高程或假定高程。
某点的经度为118°45′ ,试计算它所在6°带及3°带的带号,以及中央子午线的经度是多少? 答:N=INT(118°45′/6+1)=20 L=20*6-3=117° n=INT(118°45′/3+1)=40 l=40*3=120° 测量工作的原那么是什么?答:在测量工作中,为了防止测量误差的逐渐传递而累计增大到不能容许的程度,要求测量工作遵循在布局上“由整体到局部〞、在精度上“由高级到低级〞、在次序上“先控制后碎部〞的原那么。
确定地面点位的三项根本测量工作是什么?答:确定地面点位的三项根本测量工作是测角、量距、测高差。
第二章 水准测量设A 为后视点,B 为前视点;A 点高程是20.016m 。
当后视读数为1.124m ,前视读数为1.428m ,问A 、B 两点高差是多少?B 点比A 点高还是低?B 点的高程是多少?并绘图说明。
答:m h AB 304.0428.1124.1-=-=m H B 712.19304.0016.20=-= B 点比A 点低 何谓视差?产生视差的原因是什么?怎样消除视差?答:当眼睛在目镜端上下微微移动时,假设发现十字丝与目标像有相对运动,这种现象称为视差。
产生视差的原因是目标成像的平面和十字丝平面不重合。
消除的方法是重新仔细地进展物镜对光,直到眼睛上下移动,读数不变为止。
平方公里射电望远镜阵sKA
ห้องสมุดไป่ตู้
平方公里射电望远镜阵 S K A
闫国锋, 李长会, 陈㊀亮, 张润涛, 刘力加
( 6 1 3 6 5部队, 天津㊀3 0 0 1 4 0 ) 摘要: 现代射电望远镜在科学研究和试验中发挥着重要作用, 为了提高空间分辨率和灵敏度, 科学家提出了平方 公里射电望远镜阵 S K A 。S K A是未来的厘米与米级波长的望远镜阵, 其灵敏度是现有同类设备的 5 0倍, 同时超 大的观测视角和极宽的频率范围都是其他射电望远镜无法比拟的。S K A将会在宇宙引力波探测, 生命起源的探 0 0m口径球面射电望远镜( F A S T ) 是 索, 脉冲星和黑洞试验, 黑暗时期和暗能量研究等方面上产生深远影响。5 由我国正在实施的单口径的 S K A方案, 将会成为世界上最大单口径的射电望远镜, 其在灵敏度和接收面积上有 着不可比拟的优势。 关键词: 平方公里射电望远镜; 中性氢; 灵敏度; 分辨率; 5 0 0m口径球面射电望远镜 中图分类号: P 1 0 文献标识码: A 文章编号: 1 0 0 6- 0 7 0 7 ( 2 0 1 0 ) 1 0- 0 1 2 4- 0 4 1 5 0k m的区域内, 其余的分布在大约 30 0 0k m的范围内, 呈螺旋形 排 列, 犹 如 一 个 超 大 的 麦 田 怪 圈, 其示意图见 。 图1
㊀㊀人类强烈的好奇心、 求知欲和充分的想象力驱使着人 们对未知领域不懈的探索, 然而千百年来人类只能通过可 见光波段观测宇宙, 而实际上天体的辐射却覆盖着整个电 1 ] , 主 磁波段。射电望远镜就是探测射电波段的理想设备 [ 要由 3部分组成: 收集射电波的定向天线, 放大射电信号的 高灵敏度接收机以及信息记录、 处理系统。射电望远镜的 工作原理类似于光学反射望远镜, 天体辐射的电磁信号被 望远镜的精确镜面反射后, 同相位到达公共焦点, 被高灵 敏度接收机接收并放大, 送入数据处理系统进行分析。射 电望远镜具有很高的空间分辨率和灵敏度, 因此在过去的 几十年, 天文学家借助射电望远镜在现代天文学上作出了 杰出的贡献, 如发现了非热辐射天体、 射电星源、 类星体、 2 ] 宇宙的微波背景、 宇宙进化、 脉冲星、 引力透镜等 [ 。 随着人类活动的增加, 人们对望远镜射电的污染与日 俱增。科学家渴望在电波环境彻底毁坏前,回溯原初宇 宙,解答宇宙学提出的众多难题。在这一科学原动力驱使 1 9 9 3年国际无线电联大会上,包括中国在内的十国天 下, 文学家提出了建造巨型望远镜的计划。为此, 科学家们提 出了一个大胆的构想— — —建立 “ 平方公里阵射电 望 远 镜 [ 3 ] S K A ” 。S K A是一个 厘 米 与 米 级 波 长 的 下 一 代 大 望 远 镜, 可接收更多的无线电信号, 并观测到较暗的物质。其 2 接收面积可达 1k m , 灵敏度是当前设备的 5 0 1 0 0倍。当 2 m 的盘状接收天线显然是不可 然制造一个接收面积达 1k 2 行的, 为此, 工程师把 1k m 的收集面积分摊到许多较小的 望远镜上, 由计算机把收集到的信号进行叠加处理, 产生 类似一个大盘状天线接收所生成的图像。其中一种 S K A 4 ] 方案 [ , 其平方公里望远镜阵由上千台天线组成, 一半的 天线放置在直径 5k m 的区域内, 1 / 4的天线散布在周围
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
MultibaselineStereointhePresenceofSpecularReflectionsArticle346SubmittedtoICPR2002
AbstractWeaddresstheproblemofaccuratedepthestimationus-ingmultibaselinestereointhepresenceofspecularreflec-tions.Specularreflectionscancausetheintensityandcolorofcorrespondingpointstochangedramaticallyaccordingtodifferentviewpoints,thusproducingseverematchinger-rorsforvariousstereoalgorithms.Inthispaper,wepro-poseanewmethodtodealwiththisproblembytreatingspecularreflectionsasocclusions.Ourideaistofirstde-tectspecularpixelsbycomputingtheuncertaintyofdepthestimates.Thenwecombinetheuseofflexiblewindowsandanadaptivelyselectedsubsetofimagestoavoidthesespecularareasinallthemultibaselinestereoimages.Eventhoughspecularitiesmayexistinthereferenceimage,ac-curatedepthisneverthelessestimatedforallpixels.Exper-imentsshowthatourconsiderationofspecularreflectionsleadstoimprovedstereoresults.1.IntroductionStereointhepresenceofspecularreflectionhasbeenachallengingproblem.CorrespondenceofpointsamongstereoimagesreliesheavilyontheassumptionofLamber-tianreflectance,whereeachscenepointhasthesamecolororintensityindifferentviews.SpecularhighlightsinstereoimagesdiffersubstantiallyfromLambertianreflectioninthattheychangeinpositionandcolorfromviewtoview.Thisdifferenceinbehaviorisdisruptivetostereomatching,soweaimtocircumventthesespecularityeffects.Asmallamountofpreviousworkhasaddressedtheproblemofspecularreflectionsinstereo.BhatandNayar[1]considerthelikelihoodofcorrectstereomatchingbyanalyzingtherelationshipbetweenstereovergenceandsur-faceroughness,andin[2]theyfurtherproposeatrinocularsystemwhereonlytwoimagesareusedatatimeinthecom-putationofdepthatapoint.Jinetal.[5]posesthisproblemwithinavariationalframeworkandseekstoestimateasuit-ableshapemodelofthescene.Ofthesemethods,only[2]hasendeavoredtorecovertruedepthinformationforspecu-larpoints,butitinvolvesextraeffortstodetermineasuitabletrinocularconfiguration.Inthispaper,weproposeastereoapproachthattreatsdetectedspecularimageregionsasocclusions,sincehigh-lightseffectivelyhidetheunderlyingdiffuse(Lambertian)reflection.Whilemethodshavebeenpresentedtodealwithocclusionduetoscenegeometry[10][7],theydonotad-dressthevisibilityproblemposedbyspecularreflections.Geometricocclusionscanoccurwhenchangingtheview,butspecularreflectionstypicallyappearinthereferenceim-ageitself.Moreover,theshapeandpositioningofspecularreflectionsinimagesequencescanbeverydifferentfromthatforgeometricocclusions.Toreducethedegradationinarea-basedcorrelationcausedbyspecularhighlights,wefirstdetecttheminthestereoimagesusingacorrespon-denceuncertaintymeasure,andthendisregardthesespec-ularpointsinthecomputationofmatchingcosts.Weim-plicitlyimposeadepthcontinuityconstraintbetweenthespecularpixelanditsneighboringdiffusepixelsbyform-ingadaptivewindowsthatensureacertainnumberofdif-fusepixelsareincluded.Sincespecularpointsarerejected,theresultingwindowsareadaptiveinsizeandhaveflexi-bleshapes.Theyareusedinashiftablewindowsstrategywhichiseffectiveindealingwithpixelsnearobjectbound-ariesandspecular/diffuseboundaries,andwealsoemploytemporalselection,whichhasbeenproventobeeffectiveinhandlingsemi-occludedregions[7].Becauseofthelargedifferencesinintensityandcolor,acorrespondencecannotdirectlybecomputedbetweenaspecularpixelanditsdif-fusecounterpart,soweinsteadcorresponddiffusepixelsofotherimagesundertheconstraintoftheirdisparityrelation-shiptothespecularpixelinthereferenceimage.Weshowinourexperimentsthattheuseofadaptiveandshiftablewindows,combinedwithtemporalselection,greatlyimprovesthematchingofpixelsthatarespecularinthereferenceimage,pixelsthatarenon-specularintheref-erenceimagebutspecularinothers,andpixelsthatareneartheboundarybetweenspecularanddiffuseregions.
2.SpecularitydetectionbydepthuncertaintyByformingspecularmasksforeachimageinamulti-baselinesequence,wecanselectivelyaggregatesupportfordepthestimationonlyfromthosepixelswithhigh-confidencecolor,i.e.thediffusepixels.Variousdetectionalgorithmshavebeendevelopedthatarebasedonphysi-calmodels.Theyutilizephysics-basedcuessuchasstruc-turedlight,colorandpolarization[4][14][11][15][8][9].Formultibaselinestereo,weproposeaneffectivemethodofspecularitydetectionbasedonuncertaintyofdepthesti-mates.Foraforward-facingmultibaselinestereoconfiguration[12],disparityvarieslinearlywithhorizontalpixeldisplace-ment.Inordertoestimatethedisparityforapixel(x,y),wefirstaggregatethematchingcostsoverawindowasthesumofsumofsquareddifferences(SSSD),namelyESSSD(x,y,d)=k=0(u,v)∈W(x,y)ρI0(u,v)−ˆIk(u,v,d),(1)whereρ(•)istheper-pixelsquaredEuclideandistanceinRGBbetweenreferenceimageI0andˆIk(warpedimageofIkatdisparityd).W(x,y)isasquarewindowcenteredat(x,y).Foreachpixel(x,y)inthereferenceimage,themini-mumESSSDfordifferentdisparityvaluesdeterminestheestimateddisparitydandtheuncertaintyuoftheestima-tion:d(x,y)=argmindESSSD(x,y,d)u(x,y)=mindESSSD(x,y,d).Thevalueofuncertaintyuishighwhenmatchqualityispoor,asforaspecularpixel.Weusethisquantityasasignalforspecularreflectionwhenitsvalueexceedsathresholdt,settothemeanvalueofu(x,y)plusonestandarddeviation.Withthis,thespecularpixelscanberepresentedasabinaryimageSdeterminedbyu:S(x,y)=0ifu(x,y)≤t1ifu(x,y)>t.(2)3.AdaptiveandshiftablewindowsWiththedetectedspecularpixels,wecanperformmoreaccuratestereocorrespondencethatexcludesthemfromprocessingbyusingadaptivewindows.Adaptivewindows,proposedbyKanadeandOkutomi[6],aresquarewindowsthatextendbydifferentamountsineachoffourdirections,tomakesurethatthewindowsizeislargeenoughtoincludeenoughintensityvariation,butsmallenoughtoavoidtheeffectsofprojectivedistortion.Weextendthisideaofadap-tivewindowstoexcludepixelsdetectedasspecular,andtoalsobesureitcontainsenoughdiffusepointsforreliablematching.Thisresultsinwindowsnotonlyadaptiveinsize,butalsoadaptiveinshape.Intheformationoftheseadaptivewindows,weusethespeculardetectionSkfrom(2)forrespectiveimagesIk.Foreachpixel(x,y),thewindowsizenisfirstsettoaninitialvalueni,thennisextendeduntil