微型机器人制作方法
幼儿园童趣机械时光:简易机器人手工制作教案

文章标题:幼儿园童趣机械时光:简易机器人手工制作教案在幼儿园教育中,手工制作是一项十分重要的活动,可以培养幼儿的动手能力、创造力和想象力。
而机械制作则可以锻炼幼儿的逻辑思维和动手能力。
将手工制作和机械制作相结合,设计一个简易的机器人手工制作教案,不仅可以让幼儿在实践中学到知识,还能增加他们的乐趣和兴趣。
下面,我将介绍一个简易机器人手工制作的教案,希望能为幼儿园老师们带来一些启发和帮助。
一、教具和材料准备1. 彩色幼儿手工纸2. 剪刀3. 胶水4. 彩色毛线5. 眼睛装饰6. 活动制作教具包二、教学步骤第一步:制作机器人身体1. 将幼儿手工纸对折剪成半圆形的身体。
2. 使用胶水将两个半圆形的身体粘贴在一起。
3. 在机器人身体上粘贴眼睛装饰。
第二步:制作机器人手臂1. 将幼儿手工纸对折剪成长方形的手臂。
2. 将长方形的手臂卷成圆筒状,固定在机器人身体两侧。
3. 用毛线做成手臂上的关节,增加机器人的活动性。
第三步:装配机器人零件1. 利用活动制作教具包提供的工具,将机器人身体和手臂连接。
2. 调整机器人的手臂和身体,使之成为一个活动灵活的机器人模型。
三、教学目标通过制作简易机器人,幼儿能够在实践中体会机械的组装过程,培养他们的动手能力和逻辑思维。
通过创造机器人形象,幼儿能够发挥自己的想象力和创造力,增强乐趣和兴趣。
四、教学反思通过这个简易机器人手工制作教案,幼儿不仅可以在实践中学到机器人的组装原理和过程,还能够培养自己的动手能力和想象力。
通过制作机器人,幼儿可以在实践中感受到创造的乐趣,增强他们对机械制作的兴趣。
设计机械制作教案,不仅能够培养幼儿的动手能力和逻辑思维,还能够增加他们的乐趣和兴趣。
总结:通过幼儿园的简易机器人手工制作教案,可以激发幼儿的创造力和动手能力,培养他们对机械制作的兴趣。
在实践中,幼儿可以体验到机械的组装过程,增加对机械的理解和兴趣。
简易机器人手工制作教案也可以将手工制作和机械制作相结合,为幼儿园的教育活动增添一份乐趣和趣味。
科技小制作方法及材料
科技小制作方法及材料
科技小制作可以包括机械、电子、光学等方面的项目。
具体的制作方法和所需材料将取决于具体的项目。
以下是一些建议的科技小制作项目和所需的材料:
1. 小型电路板制作:
材料:印刷电路板(PCB)板、电子元件、焊锡、焊锡丝、焊锡烙铁、导线等。
方法:根据电路图设计制作电路板,使用焊锡将元件焊接到电路板上,并使用导线连接各个元件。
2. 自制太阳能充电器:
材料:太阳能电池板、锂电池、充电电路模块、连接线等。
方法:将太阳能电池板连接到充电电路模块上,并将电池与模块连接。
通过太阳能板采集太阳能并存储在锂电池中,从而实现充电功能。
3. 小型机器人制作:
材料:微型电机、轮子、控制电路板、传感器等。
方法:搭建机器人的机械结构,将电机和轮子安装在机械结构上,连接控制电路板和传感器。
编写控制程序,控制机器人的运动和与环境的交互。
4. 3D打印模型制作:
材料:3D打印机、3D建模软件、3D打印材料(如PLA、ABS等)等。
方法:使用3D建模软件设计或下载所需的模型文件,将文件导入3D打印机并选择合适的打印设置,开始打印操作。
根据模型的复杂性,打印时间可能会有所不同。
这只是一些示例,具体的科技小制作项目和所需材料将根据个人兴趣和具体要求而定。
选择合适的项目和材料后,可以通过搜索相关的教程、参考书籍或与其他制作爱好者交流,进行详细的制作步骤和操作方法。
纳米机器人的设计和控制方法

纳米机器人的设计和控制方法纳米技术是当今科技领域中备受关注的重要领域之一。
纳米机器人是一种在纳米尺度下操作、操控和控制的微型机器人,它们可以用于医学、环境、材料等领域,具有巨大的应用潜力。
本文将从纳米机器人的设计和控制方法两个方面进行论述。
纳米机器人的设计是实现其功能的基础,主要包括结构设计和材料选择两个方面。
在结构设计中,纳米机器人的形状和尺寸需要根据具体的应用需求进行调整。
常见的纳米机器人形状包括球形、螺旋型、管状等,其尺寸通常在纳米尺度下,例如十几至几百纳米。
此外,纳米机器人的结构还需具备高度稳定性和精确的运动控制能力。
材料选择是另一个关键因素,需要考虑纳米机器人的生物相容性、力学性能和表面特性等。
常用的材料包括金属、聚合物和碳纳米材料等,它们不仅可以提供机械强度和化学稳定性,还能在纳米机器人的表面上进行功能化修饰。
纳米机器人的控制方法是实现其精确操作和操控的关键。
目前,主要有外部控制和自主操作两种方法。
外部控制是通过外部的能量源或信号来控制纳米机器人的运动和操作。
例如,利用磁场、声波或光线等可控制纳米机器人的位置和方向,并实现操纵和操控。
外部控制方法具有操作简单和高度可控性的优势,但受限于外部环境和设备的约束。
相比之下,自主操作则是指纳米机器人通过内部系统进行运动和操作,不依赖外部控制。
这需要在纳米机器人内部集成传感器、执行器和控制器等组件,以实现自主导航、目标跟踪和智能决策等功能。
自主操作方法适用于复杂和动态环境,并具有一定的适应性和自适应性,但需要解决纳米尺度下的能量供应和信息处理等问题。
与纳米机器人的设计和控制方法密切相关的是纳米尺度的通信和能量供应技术。
纳米机器人的通信技术可以通过无线或有线方式进行,传输信息和接收指令。
无线通信可以利用纳米尺度下的电磁波或声波进行,并通过信号的频率、幅度和相位等特性进行编码和解码。
有线通信则利用纳米尺度下的纳米线、纳米管等结构进行信息传输。
能量供应技术是保证纳米机器人长时间稳定运行的关键。
微型机器人技术的原理及应用

微型机器人技术的原理及应用随着人工智能、物联网、云计算等技术的发展,微型机器人技术也在不断地得到提升和应用。
微型机器人,是指体积小、能够自主行动、具有一定智能和多种功能的机器人,其尺寸可以从纳米级到数厘米。
微型机器人技术的原理微型机器人的制作原理基本上都是由微纳制造技术来实现。
微纳制造技术,是指利用纳米、微米尺度下的科技和技术手段,通过微型加工、微纳结构设计、材料科学等多种技术,制造出具有特殊结构、性能的微型和纳米级物体。
在微型机器人技术中,主要包括微型机电系统技术(MEMS)、纳米机电系统技术(NEMS)、等离子体强化技术(PEES)等。
微型机器人也必须具备自主行动的能力。
为了实现微型机器人的自主行动,需要在机器人上安装感应器、执行器和控制系统。
同时,各种运动、控制、感知、鉴别等算法和遥控技术也很重要。
微型机器人技术的应用1.医疗健康领域:微型机器人可以进入人体内部,通过对人体的感应器和控制系统来治疗疾病。
比如,微型机器人可以在人体内部清除肿瘤或药物输送。
2.军事领域:微型机器人可以在危险环境中进行侦查任务,比如在战争中侦查和摧毁敌人的设施。
此外,微型机器人还可以在雷区或其他危险场所进行侦查和报告。
3.环境监测领域:微型机器人可以被用于监测和维护环境。
比如,在水中进行监测和清理、在地下引领空气、化学气体、毒物等的检测和监测等等。
4.工业制造领域:微型机器人可以处理先前无法处理的精密工作,也可以用于工厂的自动化生产和维护。
5.智能交通领域:通过微型机器人,可以实现道路交通的监测和管理。
比如在车道上进行监测,为交通规划和分配提供有价值的信息。
微型机器人技术的未来与现有技术相比,微型机器人有着比较显著的优势:1.体积小,能够进入蚊子、细胞等微观生物,扩展了实验测量的范围。
2.提高了生产效率,在许多方面实现自动化,节省了时间和人力成本。
3.协作性强,可以充分利用集体智慧进行任务分配,提高生产效率。
4.更加环保,减少对环境污染的风险。
用超轻粘土制作机器人的步骤

用超轻粘土制作机器人的步骤嘿,朋友们!今天咱就来讲讲怎么用超轻粘土做出超酷的机器人呀!先准备好你的超轻粘土,各种颜色都来点,就像给机器人准备一套五彩斑斓的战衣。
然后呢,想象一下,机器人得有个结实的身体吧。
那就先搓出一个大大的圆球,这就是机器人的躯干啦!这圆球可得搓得圆圆的,不然你的机器人走起来可能会歪歪扭扭哦,像喝醉酒了似的,那可不行!接着,给它加上四肢呀。
胳膊就细细长长的,腿呢,可以稍微粗一点,这样站得稳当呀。
这就好比人要是腿太细了,那不得晃晃悠悠的呀。
把这些粘到身体上,嘿,机器人的大致模样就出来啦。
再来,给它弄个头吧。
头也得圆圆的,然后用工具或者你的手指头给它弄出眼睛、鼻子、嘴巴的位置。
这眼睛可得炯炯有神呀,不然怎么看清前方的路呢。
然后呢,机器人总不能光秃秃的吧,咱得给它装饰装饰。
用各种颜色的粘土做出一些小零件,什么按钮啦、天线啦,粘在它身上合适的地方。
就好像人要戴个帽子、挂个项链啥的,一下子就精神了不少呢。
这时候,你看看你的机器人,是不是感觉缺了点啥?对啦,得给它来点色彩呀!把你喜欢的颜色涂上去,让它变得更加酷炫。
哇哦,一个超轻粘土做的机器人就大功告成啦!你可以把它摆在桌子上,让它守护你的小天地。
你说这超轻粘土多神奇呀,就这么揉揉捏捏,一个机器人就诞生啦!这可比变魔术还好玩呢。
而且呀,你可以根据自己的想象,做出各种各样的机器人,高的矮的胖的瘦的,想怎么来就怎么来。
还等什么呢?赶紧动手试试吧,让你的创意和双手一起舞动起来,创造出属于你的独一无二的机器人!说不定你的机器人还能参加机器人大会呢,哈哈!。
幼儿园科技教案:制作简易机器人

幼儿园科技教案:制作简易机器人【文章】幼儿园科技教案:制作简易机器人科技与未来的发展息息相关,为了让孩子们从小就了解科技的奥秘,培养创造力和解决问题的能力,幼儿园里的科技教育变得愈发重要。
制作简易机器人作为一种有趣而实用的教学方式,可以帮助幼儿了解机器工作原理,培养他们的观察力、想象力和动手能力。
一、引言在现代科技的时代背景下,让幼儿园的孩子们接触并学习科技知识,对于他们日后的成长将具有深远的影响。
本文将介绍一种简易机器人制作的教案,帮助幼儿园老师和家长们为孩子们打开科技的大门。
二、制作材料准备为了制作简易机器人,我们需要准备以下材料:1. 塑料杯或纸杯2. 电池3. 小电动机4. 铅笔、橡皮筋和胶带5. 纸板或其他废旧材料6. 剪刀7. 彩色纸和彩笔(可选)三、制作步骤1. 将电池和电动机连接起来。
将电机的一端连接到电池的正极,另一端连接到电池的负极。
可以使用铅笔将电机固定在电池上。
2. 在塑料杯或纸杯上打个洞,将电动机的轴伸入杯中。
确保电动机可以自由旋转。
3. 使用纸板或者其他废旧材料制作机器人的身体和头部。
可以按照孩子们的想象力来创造各种形状和造型。
4. 将电池和电动机放在机器人身体内,使用胶带固定。
5. 尝试启动机器人,注意观察电动机的运转。
如果机器人无法启动,检查连接是否正确,并确保电池有足够的电量。
四、实施教学过程1. 引入科技概念:通过简单的动画或图片,向孩子们介绍机器人的概念,并和他们一起探讨机器人在我们生活中的应用。
2. 制作过程指导:介绍制作简易机器人的步骤,帮助孩子们了解每个材料的作用。
鼓励他们动手操作,提出问题并找到解决方法。
3. 制作实践:根据教师的指导,孩子们一起制作自己的简易机器人。
鼓励他们发挥创造力,在机器人的造型和装饰上进行个性化设计。
4. 机器人展示和讨论:孩子们展示他们制作的机器人,并讨论机器人的不同部件和功能。
教师可以引导他们思考机器人的用途和可能的改进。
橡皮泥机器人制作方法

橡皮泥机器人制作方法橡皮泥机器人是一种非常有趣和创造力的手工制作项目。
你可以使用橡皮泥来制作一个可动的机器人,并给它设计出不同动作和特点。
下面是一个简单的橡皮泥机器人制作方法,希望对你有帮助。
材料准备:1. 不同颜色的橡皮泥2. 制作模具(如骨头、眼睛、手臂等)3. 牙签或小棍子4. 线5. 一些小工具(如小刀、小剪刀等)制作步骤:1. 确定机器人的形状和大小,你可以自己设计或者参考一些机器人的图案。
2. 开始制作机器人的身体部分。
将所需颜色的橡皮泥揉成一个球状,并按照机器人的形状,在桌子上轻轻滚动揉成所需形状的身体。
3. 制作机器人的头部。
用同样的方法,将橡皮泥揉成一个稍微大一点的球状,并在底部用手指轻轻按压凹陷处,制作出一个凹陷的地方,作为机器人的面部。
4. 将机器人的头部连接到身体上。
使用牙签或小棍子,在头部的凹陷处插入,然后再插入机器人的身体中。
5. 制作机器人的面部。
你可以使用不同颜色的橡皮泥来制作眼睛、嘴巴和鼻子等部位。
可以使用模具来塑造出比较完美的形状,然后将它们粘附到机器人的头部上。
6. 制作机器人的四肢。
使用橡皮泥揉成四根长条状,作为机器人的手臂和腿部。
可以用小刀或小剪刀修剪橡皮泥,使其更加光滑和匀称。
7. 将机器人的四肢连接到身体上。
使用牙签或小棍子将手臂和腿部插入到机器人身体的相应位置。
8. 设计机器人的特征。
根据你的喜好,可以给机器人添加一些独特的特征,如骨头、翅膀、装饰等。
同样,你可以使用模具或手工塑造来制作这些特征。
9. 为机器人添加细节。
可以使用纹理工具或小工具在机器人的身体和面部添加一些细节,如纹理、花纹等,使其更加逼真或富有个性。
10. 完成机器人的装饰。
根据你的创意和喜好,可以给机器人的身体添加一些装饰,如五颜六色的小球、金属片等,使其更加华丽和吸引人。
总结:橡皮泥机器人的制作可以说是一项非常有趣和创造力的手工制作项目。
通过自己设计和动手操作,你可以制作出一个独特的机器人,并赋予它不同的特征和动作。
简单的机器人制作教程
简单的机器人制作教程这是一个最简单的机器人,一个振动机器人,即以偏心摆锤马达的震动效果作为挪动的动力,算是一种非常简单的BEAM机器人。
整个造型就像一只臭虫,由于振动时接近狂飙一样的不规则运动方式,所以起名为“暴走的臭虫”。
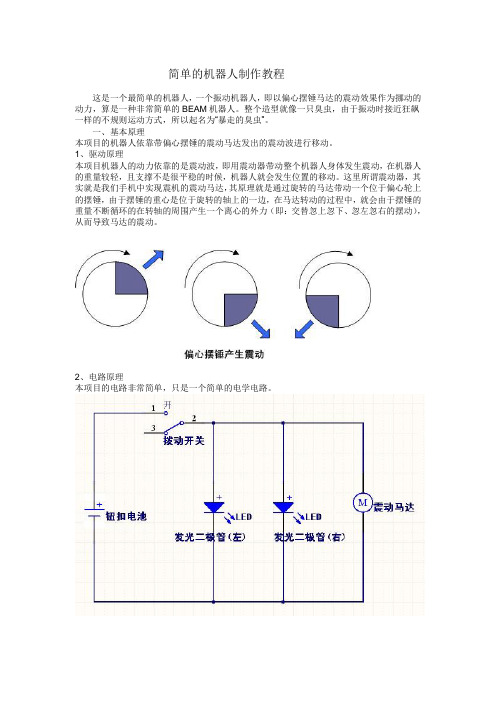
一、基本原理本项目的机器人依靠带偏心摆锤的震动马达发出的震动波进行移动。
1、驱动原理本项目机器人的动力依靠的是震动波,即用震动器带动整个机器人身体发生震动,在机器人的重量较轻,且支撑不是很平稳的时候,机器人就会发生位置的移动。
这里所谓震动器,其实就是我们手机中实现震机的震动马达,其原理就是通过旋转的马达带动一个位于偏心轮上的摆锤,由于摆锤的重心是位于旋转的轴上的一边,在马达转动的过程中,就会由于摆锤的重量不断循环的在转轴的周围产生一个离心的外力(即:交替忽上忽下、忽左忽右的摆动),从而导致马达的震动。
2、电路原理本项目的电路非常简单,只是一个简单的电学电路。
这里我们采用类似电子表所使用的微型钮扣电池作为机器人的能源;采用手机震机用的震动马达作为动力源;采用LED发光二极管作为发光的眼睛;而控制控制机器人启动的开关则是选择一般的小型选择拨动开关。
需要注意的是,一般的选择拨动开关有三个引脚,其中拨动开关可以使中间的引脚(上图之2)有选择的接通两边(上图之1和3)任意一侧的其中一个引脚。
同时,用于做眼睛发光的LED发光二极管的引脚是区分正负极的。
另外提一下,LED发光二极管是有一个启辉电压的,大概是2V多左右,只有供电的电压达到这个值时发光管才会发光。
本项目中,是使用了两只发光二极管作为眼睛的。
机器人开始启动的时候,发光二极管是会发光的,当发现其不亮的时候,就是说明电池的电能已经消耗了不少,电池的电压已经下降到发光二极管无法点亮的程度,这种时候震动马达还是会继续震动的。
因为震动马达启动的电压并不高,在电池的电压已经下降了很多的程度下震动马达还是可以继续工作。
其中注意:1、拨动开关选用1、2两个引脚;2、LED发光二极管的引脚是区分正负极的,要对应连接到电池的正负电极(下面有说明判别的方法);3、钮扣电池的外壳,只有一面金属部分的是负极,整个包住周围以及其中一面的金属部分是正极(见下图所示)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如何制作微型机器人
微型机器人制作是一个创新而有趣的科技活动。
下面是一些步骤可以帮助你制作自己的微型机器人。
步骤1. 准备硬件和材料
首先,需要一些基础的电子元件和工具,如电池、电机、细金属线等。
可以在电子元件店购买这些物品。
另外,需要一些废旧的玩具和塑料材料作为机器人外壳。
步骤2. 组装机器人电路
使用万用表等工具,在获得的电子元件上连接正确的电线。
然后将电线连接到电池和电机上,组成机器人的基本电路。
步骤3. 制作机器人外壳
使用废旧的玩具和塑料材料,按照个人创意设计机器人的形状和尺寸。
最终可以制作出一个简单而有趣的机器人外壳。
步骤4. 安装电路到外壳中
将组装好的电路安装进机器人的外壳内部。
需要注意电路与外壳之间的安全和合适的固定方式。
步骤5. 测试机器人的功能
连接电池和电机,测试机器人的功能和动作是否符合预期。
需要不断调整细节,确保机器人的运动和外观都准确无误。
通过以上步骤,您可以制作出一个自己的微型机器人。
让我们用科技创造更多有趣的体验吧!。