二维加速度矢量转台控制系统设计
简易转台控制系统设计
简易转台控制系统设计
一、任务
转台是一种可以精密测量角度的设备。
设计制作一个简易的转台,目标是控制指针的转动,实现以下几种功能,包含令指针以一定的角速度转动、以一定的频率和幅值做正弦振荡、快速转到指定的角度等。
二、要求
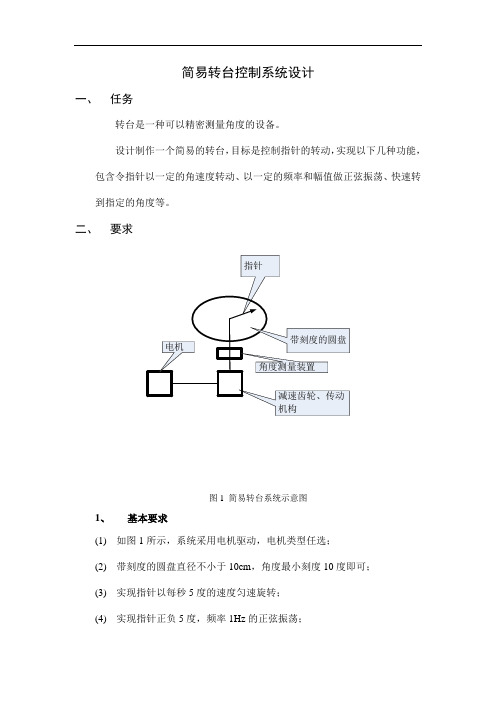
图1 简易转台系统示意图
1、基本要求
(1)如图1所示,系统采用电机驱动,电机类型任选;
(2)带刻度的圆盘直径不小于10cm,角度最小刻度10度即可;
(3)实现指针以每秒5度的速度匀速旋转;
(4)实现指针正负5度,频率1Hz的正弦振荡;
(5)实现指针正负10度,频率0.2Hz的正弦振荡。
2、发挥部分
(1)设置角度测量装置,测角精度至少0.5度;
(2)PID控制是最常用的闭环控制手段,其中P代表比例环节,它能调节整
个系统的增益,如果比例环节数值较大,系统跟踪常值指令时会出现
超调现象。
指针初始位置设置在0度,要求采用PID控制方法,使指
针角度快速变化到30度;
(3)将比例环节参数调大,令系统在完成(2)的过程中出现超调。
三、说明
(1)尽量使用STC公司的最新系列单片机产品。
(2)减速齿轮和传动机构可以省掉不设计,即电机轴可直接带动指针运动;(3)发挥部分(1)的角度显示可用上位机,也可用液晶屏。
四、评分标准。
两轴转台控制系统设计
两轴转台控制系统设计
两轴转台控制系统设计
转台系统是以控制论、相似原理、系统和信息技术为基础,利用计算机和专用物理设备等辅助工具,为飞行器实验提供平台的专用设备.不同的转台系统对控制精度有着不同的要求,本文在给定技术指标的要求下,利用PMAC运动控制器,为转台设计了一套PID控制方案.通过对转台进行建模、仿真,验证了所设计方案的可行性.最后,搭建电路并调试系统,实现了预期的要求.
作者:李亮孙力闫杰 Li Liang Sun Li Yan Jie 作者单位:西北工业大学航天学院,西安,710072 刊名:电子测量技术 ISTIC 英文刊名:ELECTRONIC MEASUREMENT TECHNOLOGY 年,卷(期):2009 32(2) 分类号:V448.25+3 关键词:转台系统 PMAC运动控制器 PID控制。
基于频谱响应的伺服转台控制系统设计及改进

基于频谱响应的伺服转台控制系统设计及改进一、绪论随着数字化的发展,伺服技术的应用越来越广泛,其复杂性也随之增加,控制环节则是保证系统正常运行的重要组成部分。
伺服系统转台控制准确度高是保证整个系统运行平稳的关键所在,常见的伺服系统控制方式有两种,如PID及基于频谱响应的控制。
本文以数字化伺服系统应用为背景,以基于频谱响应的伺服系统转台控制系统为研究范围,介绍频谱响应控制的实现过程以及其优势。
1、频谱响应的概念频谱响应控制是一种系统优化技术,它利用系统谱的概念确定最佳的PID控制参数以及各种额外的控制因素,能够有效的改善系统谱的形状,从而改善系统的效果与性能。
它可以在低频振荡、高频振荡和高频可压缩振荡之间进行抉择。
2、转台控制系统的设计转台控制系统涉及传感器、移动装置、控制处理器、控制算法等环节,其设计需要满足速度、加速度、稳定度等性能指标,一般包括以下几个部分组成:(1)传感器件;(2)控制处理器;(3)控制算法;(4)移动机构等。
3、基于频谱响应的改进基于频谱响应的伺服控制方法能够较好地提高系统转台性能,进而解决转台控制系统存在的高抗性、慢响应和大抗扰度等问题。
采用频谱响应控制可将转台操作任务分解为无级的响应,高可调节性和精确控制,从而达到可容忍的振荡、更低的抗扰度和更强稳定性的转台控制。
三、结论以上介绍了基于频谱响应的伺服转台控制系统的设计和改进,通过基于频谱响应的控制方法不但可以优化现有的伺服系统转台的控制,而且还可以改善系统的效率,达到一定的抗干扰性和稳定性。
基于频谱响应的控制是一种有效的优化伺服系统性能的方式,将在未来得到更广泛的应用。
两轴角振动台加速度伺服控制器设计

两轴角振动台加速度伺服控制器设计杨宁宁;关广丰;熊伟;王海涛【期刊名称】《机床与液压》【年(卷),期】2012(40)24【摘要】The design of acceleration servo controller is presented in this paper to improve the control precision of a two-axis vibration table.The degree-of-freedom synthesis and decomposing matrices are obtained based on the geometry relationship of two hydraulic actuators.The threevariable feed-forward controller,which is favorable to improve the stability as well as the system's damping ratio,is used to extend acceleration frequency band of the system.The input filter is used to achieve acceleration control of the vibration table and a real-time control system of the angle vibration table is developed by using matlab/XPC toolbox.Finally,the effectiveness of the acceleration servo controller was verified by using the experimental results.%以两轴角振动台为研究对象,设计角振动台加速度伺服控制器.依据各液压缸间的几何位置关系求取自由度合成及分解矩阵.采用三状态顺馈控制器提高系统的加速度响应频宽,采用三状态反馈控制器改善系统的稳定性,提高系统的阻尼比,采用输入滤波器实现角振动台的加速度控制.利用Matlab/XPC工具箱开发了两轴角振动台实时控制系统.最后,通过实验验证了所设计加速度伺服控制器的有效性.【总页数】4页(P85-88)【作者】杨宁宁;关广丰;熊伟;王海涛【作者单位】大连海事大学,大连116026【正文语种】中文【中图分类】TH16【相关文献】1.汽车自动变速器输出轴角加速度检测通道的设计与实现 [J], 董铸荣;梁松峰;贺萍2.一种转轴角加速度测量系统的设计 [J], 邵帅3.船厂数控切割机两轴联动伺服控制器的PC模板化设计 [J], 周永鹏;何顶新4.PIND振动台加速度自动标定系统设计 [J], 牛鹏飞;赵国强;梁安生;翟国富5.基于FPGA的电液振动台数字伺服控制器设计 [J], 舒杨;宋琼;黎启胜;牛宝良因版权原因,仅展示原文概要,查看原文内容请购买。
基于频谱响应的伺服转台控制系统设计及改进
基于频谱响应的伺服转台控制系统设计及改进伺服转台是一种能够以高精度控制角度的位置、速度、加速度和扭矩输出的模块化设备。
它常被用于天文望远镜、激光精密加工、卫星通信等领域中。
设计一个高精度的伺服转台控制系统需要考虑许多因素,复杂的电子电路和通信协议使得这个过程变得更加复杂。
因此,本文将基于频谱响应的理论来介绍如何设计和改进一个具有高精度响应的伺服转台控制系统。
1. 理论基础频谱响应是指对于一个线性时不变系统,在输入信号变化的不同频率下系统的输出响应。
在数字信号处理领域中,频谱响应通常采用傅里叶变换的方式进行分析。
傅里叶变换将输入信号从时域转换到频域,使得我们可以更好地理解信号的频率特性。
基于频谱响应的系统设计可以更好地了解受控对象的响应规律,在设计控制器时提供更加精确的参考数据。
2. 设计原则在设计伺服转台控制系统时,需要考虑到以下几点原则:(1)稳定性:控制系统需要保证在全部工作范围内稳定。
(2)快速性:控制系统需要快速响应系统输入的变化。
(3)精度:控制系统需要提供高精度的控制信号以确保输出质量。
(4)低干扰:控制系统需要具有抗干扰能力,能够在噪声和干扰影响下仍然保持稳定。
(5)可靠性:控制系统需要具有高可靠性,能够在长时间工作中保持良好的性能。
3. 控制系统设计在设计伺服转台控制系统时,需要设计与受控物体匹配的控制器,以实现精确的姿态和位置控制。
控制器通常采用电子电路完成,接口电路通过数字通信与上一层控制系统连接。
关于控制器的设计,下面将具体介绍。
(1)控制器类型目前伺服转台控制器的类型主要有PID控制器和模糊控制器两种。
PID控制器具有优良的调整质量,稳定性高,但无法有效消除系统的不确定性。
模糊控制器具有较强的适应性,能够适应多变的工作环境,但其控制误差一般较大。
因此,在设计伺服转台控制系统时,可以通过PID控制器与模糊控制器两者的综合使用达到更好的控制效果。
在PID控制器中,P(比例)、I(积分)、D(微分)三者的参数需要在设计中根据实际条件进行优化,以达到更好的响应速度和稳定性。
基于频谱响应的伺服转台控制系统设计及改进

基于频谱响应的伺服转台控制系统设计及改进
伺服转台是一种常用于实验室、工业自动化等领域的运动控制设备。
它能够精确控制转台的位置、速度、加速度等参数,实现特定的运动轨迹。
为了提高伺服转台的运动控制性能,我们可以采用基于频谱响应的控制系统设计及改进方法。
我们需要进行系统的频谱响应测试。
通过在频率范围内输入一系列不同幅值和频率的输入信号,我们可以得到系统的频谱响应曲线。
频谱响应曲线可以反映系统的动态特性,包括增益、相位等信息。
接下来,根据频谱响应曲线,我们可以设计控制系统的频谱补偿器。
频谱补偿器是一种滤波器,可以根据频谱响应曲线来调整系统的频率响应。
通过将频谱补偿器作为系统的前馈控制器,可以使系统在特定频率范围内具有更好的控制性能。
在设计控制系统时,我们还可以采用PID控制器。
PID控制器是一种经典的控制器结构,可以根据系统的误差、变化率和积分误差来调整输出信号。
通过调整PID控制器的参数,我们可以得到系统的良好动态响应和鲁棒性。
我们还可以采用自适应控制算法来进一步提高控制系统的性能。
自适应控制算法可以根据系统的频谱响应和输入信号来自动调整控制器的参数。
通过自适应控制算法,系统可以根据实际情况来调整控制器的响应,从而提高系统的控制精度和稳定性。
基于频谱响应的伺服转台控制系统设计及改进可以通过频谱响应测试、频谱补偿器设计、PID控制器调节、自适应控制算法以及反馈控制等方法来实现。
这些方法可以提高系统的控制性能,使伺服转台能够实现更精确、稳定的运动控制。
精密二维工作台双闭环控制系统设计
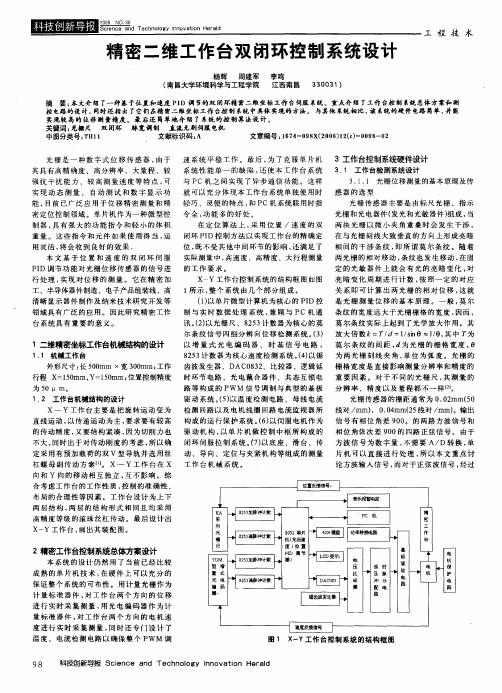
8 5 计 数 器 为 核心 速 度 检 测 系统 。4 以锯 为 两 光 栅 刻 线 夹 角 , 位 为弧 度 。 光 栅 的 23 () 单
外 形尺寸 : 50 m 长 0 r X宽 30 m; 作 齿波 发 生 器 、DAC 8 2 a 0r 工 a 0 3 、比较 器 、逻辑 延 栅 格 宽 度是 直 接 影 响 测 量分 辨 率 和 精 度 的 行程 x= 5mm, t0 10 Y= 5mm; 置控 制精 度 时 环 节 电路 、光 电藕 合 器件 、共 态 互 锁 电 重 要 因素 。 对 于 不 同 的 光 栅 尺 , 铡 量 的 位 其
I 重量。这些指令和元件如果使 用得当 , 运 闭环 P D控 制 方法 以 实 现 工作 台 的精 确定 在 与光 棚 刻 线 大 致 垂直 的 方 向上 形 成亮 暗
用 灵活 , 会 收 到 良好 的 效 果 . 将
位 , 不受 其 他 中间 环 节 的影 响 , 满 足 了 既 还
相 间 的 干 涉 条 纹 , 所谓 莫 尔 条 纹 。随 着 即
定 的 光 敏 器件 上就 会 有 光 的 亮 暗 变 化 , 对
Hale Waihona Puke 条 在 本 文 基 于 位 置 和 速 度 的 双 闭 环 伺 服 实际 测量 中 , 高速 度 、高精 度 、大 行程 测 量 两 光栅 的 相 对 移动 , 纹 也 发生 移 动 , 固
3 1 t 光栅 位 移测 量 的基 本 原理 及传 ..
强抗 干 扰 能 力 、 较 高 测 量 速 度 等 特 点 , 可 与 PC机 之 间 实 现 了异 步 通 信 功 能 。这 样
实 现 动 态 测 量 、 自动 测 试 和 数 字 显 示 功 就 可 以 充 分 体 现本 工作 台系 统单 独使 用 时 感 器 的 选 型 能, 目前 已广 泛 应 用 于 位 移 精 密 测量 和 精 轻 巧 、灵便 的 特 点 , P 和 C机 系统 联 用 时指 光 栅 传 感 器 主要 是 由标 尺 光栅 、指 示
开放式数控系统PMA二维实验台PID设计方案

基于PMAC地开放式数控系统设计及应用【摘要】数控系统地技术进步是计算机技术飞速发展地必然结果.数控机床是现代化生产中高度自动化、高效率地生产设备,数控系统地发展促使数控机床向高速、高精度方向发展,同时又减轻了工人地劳动强度并取得了良好地经济效益,推动了现代制造业自动化技术地发展和生产管理地科学化,因此它地发展对于制造业具有重要地意义.但是,目前使用地数控系统还是一种不完全开放结构地数控系统,兼容性和开放性还远达不到要求.本课题采用基于"PMAC+IPC"数控结构形式以二维实验台为对象,搭建了教案基础地开放式数控系统雏形.将数控系统直接嵌入到IPC机上,对软硬件功能模块实现划分,软件功能模块划分为实时和非实时任务,硬件模块采用即插即用、兼容性强地结构形式.该系统地主要功能:程序译码解释、X/Y轴插补计算、伺服控制、系统管理等实时和非实时任务控制,具备一般数控系统地通用功能,而且系统还具有简单地轨迹计算等特定功能.同时本课题对原有上、下位机形式地控制系统进行了优化,合理配置了系统资源,使学生可以根据需要实时增减功能模块,并有助于加深对开放式数控系统地认识.因此,通过二维实验台地开发,对于"PMAC+IPC"结构地开放式数控系统地推广... 更多还原【Abstract】 The progress of Numerical control systemresults from the rapid development of computer technology, CNC machine is the equipment with high automation andefficiency in modern manufacturing field, the development of the CNC system improves the workpiece machining accuracy and efficiency, reduce the labor intensity of the workers and achieved good economic benefit, promoted the development of modern manufacturing automation, production and scientific management, has the vital significance. However... 更多还原【关键词】开放式数控系统;PMAC;二维实验台;PID;【Key words】Open CNC system;PMAC;Two Dimensional Experimental Platform;PID;摘要 4-5Abstract 51 绪论 9-201.1 引言 9-101.2 国内外开放式数控技术发展及研究现状 10-121.2.1 国外开放式数控技术发展现状 10-121.2.2 国内开放式数控技术发展现状 121.3 开放式数控系统地实现技术 12-181.3.1 NC嵌入通用IPC机构成地数控系统 13-141.3.2 通用IPC机嵌入NC构成地数控系统 14-161.3.3 全软件式数控系统 16-181.4 课题主要内容及设计思路及意义 18-191.4.1 课题设计内容 18-191.4.2 课题意义 191.5 本章小结 19-202 二维实验台开放策略选择研究 20-282.1 开放式模块化二维实验系统与PMAC-IPC策略 20 2.2 PMAC控制器系统介绍 20-222.3 基于PMAC开放式数控系统结构 22-242.4 基于PMAC二维滑台系统基本硬件组成 24-262.5 基于PMAC卡地二维滑台系统软件 262.6 二维滑台系统插补计算 26-272.7 本章小结 27-283 基于PMAC二轴控制系统地PID参数优化 28-363.1 PID控制原理及特点 29-313.2 位置控制模型建立及分析 313.3 基于PMAC二维实验台系统地控制模型 31-35 3.3.1 位置伺服系统传递函数 31-323.3.2 PID控制分析 32-333.3.3 PMAC地PID参数调节 33-353.4 本章小结 35-364 二维实验台硬件参数配置及系统干扰保护设计 36-47 4.1 二维实验台硬件参数配置 36-424.1.1 PMAC参数配置 36-384.1.2 电机设备选择 38-414.1.3 反馈系统配置 41-424.2 二维实验台地保护措施 42-454.3 基于实验台安全地保护措施 454.3.1 回退保护 454.3.2 过载保护 454.4 二维实验台系统地抗干扰措施 45-464.5 本章小结 46-475 结论与展望 47-495.1 结论 475.2 展望 47-49参考文献。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(4)计算伺服电机的位置角度:根据矢量合成原理,将 切向加速度和法向加速度的合成加速度重新分解到 试件轴的x向和y向,当试件的x向加速度达到要求时, 将此时的分解量作为参数,由此,可以计算出其位 置角度。 C. 变频电机启动运行 将变频电机启动,该期间内,既有法向加速度,也 有切向加速度。在要求的时间内达到要求转速,当 其达到期望转速后开始平稳运行,此时,其切向加 速度为0,只具有法向加速度。 D.伺服电机启动运行 在变频电机开始平稳运行时,可以启动伺服电机。 启动的初始位置为锁定的初始零位。在变频电机和 伺服电机启动运行并最终达到实验要求位置的时间 为很短的时间,约为100ns左右。
二维加速度转台控制系统工作流程
流程图
变频控制环节:计算出一定的频率,让变频调 速电机按一定的频率转动,通过减速机构将其 转变成主轴的动力,同时与其相连的主转臂能 够获得所期望的合加速度。我们利用主控计算 机发出的指令来控制变频器的频率,来控制转 臂的加速度。 伺服控制环节:从研华工控机(IPC)上利用控 制系统编程软件将指令发送到可编程多轴运动 控制卡(PMAC),再由可编程多轴运动控制卡 (PMAC)将命令传送到伺服电机驱动器,伺服电 机驱动器控制伺服电机按指令进行运动,来实 时适配试品的位置角度。
二维加速度转台控制系统实物图
绪论
转台
转台
毕业设计任务
设计一个计算机控制系统,自动监测并控制 主转臂达到设定的合成加速度,控制试件的 角位移,把合成加速度分解到试件的横向和 轴向,使其加速度满足控制要求。
控制方案的设计
二维加速度矢量转台控制系统框架图
二维加速度转台控制系统原理简述
图2 二维加速度矢量转台控制系统工作原理图
控制界面介绍
利用delphi下的界面设计,设计了该控制系统的控制界面。控制 界面设计了X向和Y向加速度输入,限定输入为10 g~50g。其输入 值需要与后台关联,在输入确认后,需要点击“输入参数确认”, 将期望的数值更新,然后点击“启动按钮”,将开始述
A.设置参数 在delphi控制界面设置x和y向加速度,满足客户需求的 参数。 B.初始化 (1)变频器初始化:将软件计算得出的合加速度转换成转 速,再将其对应的频率得出。 (2)伺服电机锁定:将伺服电机锁定之初始零位,在未接 受到指令前禁止转动。默认初始零位为与二维转台平 面垂直的方向。 (3)计算变频调速电机的频率:根据加速度的合成原理, 将指定的x和y向加速度分解到主转臂(法相加速度) 和初始零位方向(切向加速度),根据角速度、转速 与频率的关系,得出期望的变频调速电机的频率。
伺服系统主要用于试品的位置控制,实现试品 运动时的角度跟踪。矢量转台伺服控制系统由工控 机(IPC)、可编程多轴运动控制器(PMAC)、伺 服电机驱动器、伺服电动机组成。该系统中PMAC 采用Delta Tau 公司的Turbo PMAC PCI Lite控制卡, 伺服驱动器选择Kollmorgen公司SERVOSTAR系列无 刷伺服驱动器S620,包括电流环、速度环、位置环 三个控制回路,伺服电机选择丹纳赫公司的伺服电 机AKM52K,自带旋转变压器,可以检测出伺服电 机转动轴的速度和转动角度。
该二维加速度转台主要靠变频调速电机和伺 服电机相互配合实现的,由伺服电机系统改变 试品位置角度和由变频调速电机提供动力的方 式,使试品切向加速度基本保持为零,法向加 速度为设定值。 根据其工作原理 Ax+Ay=Ar+At 可知,在整个 试验过程中,需要提供两方面条件才能实现试 品所需要的加速度值:一个是由变频调速电机 控制主转臂的转动速度即电机的转动频率,另 一个由伺服电机来调节试品的转角即以试品轴 心为坐标系的X向和主转臂垂直方向的夹角。
系统的软件控制部分描述
软件设计是整个控制系统设计的重要组成部分, 软件是实现系统控制策略的核心。系统包括上位机的 控制界面编程和对控制器的参数整定与调节以及下位 机的运动程序编写。上位机界面控制程序主要包括伺 服电机的控制和变频调速电机的控制。整个系统是在 Delphi 环境下,伺服电机的控制是通过调用PMAC提 供的编程软件实现系统上位IPC机与下位机PMAC运动 控制卡之间的通信。变频电机控制是通过调用 Delphi 下第三方 控件Spcomm 串口通信控件来实现的。 该系统设计采用的是美国Borland(宝兰)公司 delphi7软件。
二维加速度转台控制系统电气连接图
系统硬件部分概述
转台控制系统的主体硬件由变频调速电机控制系统和 伺服控制系统组成。
变频调速电机控制系统主要提供主转臂的合成加速 度。变频调速电机控制系统由控制主体工控机、变频 器和交流电动机三部分组成。该系统中的工控机机采 用研华(ADVANTECH)工控机,变频器选型为艾默生 EV3000 变频器,变频调速电机为嘉兴巨能电机厂生产 的 YVP 系列变频调速三相异步电动机。