哈尔滨工业大学第7版理论力学第4章课后习题答案_图文(精)
理论力学第七版答案
理论力学第七版答案第一章粒子运动学1.1 基本概念•位矢、速度矢量和加速度矢量的定义和表示方法。
•直角坐标、柱坐标和球坐标系的转换关系。
•速度的瞬时和平均定义。
1.2 运动学基本定理•切线加速度与半径曲线关系。
•速度、加速度与位矢、速度矢量之间的运动学关系。
1.3 平面运动•直线运动:匀速直线运动和变速直线运动的运动学方程。
•曲线运动:实际问题中曲线运动的应用。
第二章力学基本定律2.1 牛顿第一定律•牛顿第一定律的定义和说明。
•惯性系和非惯性系的区别。
2.2 牛顿第二定律•牛顿第二定律的定义和表达式。
•质点和刚体受力的运动学关系。
2.3 牛顿第三定律•牛顿第三定律的定义和说明。
•物体之间相互作用力的特点。
2.4 小结•牛顿定律的应用场景和注意事项。
第三章力的合成与分解3.1 力的合成•力的合成的数学表达式。
•合力的性质和特点。
3.2 力的分解•力的分解的数学表达式。
•杠杆原理和力矩的概念。
3.3 直角坐标系内的力的合成与分解•直角坐标系下力的合成与分解的具体计算方法。
•应用场景和实例。
第四章力的作用点与力矩4.1 力的作用点•力的作用点的概念和性质。
•力的作用点变化对物体运动的影响。
4.2 力矩•力矩的定义和计算公式。
•力矩与力之间的关系。
4.3 平衡条件•平衡条件的定义和判断方法。
•平衡条件的应用。
第五章动力学基本定律5.1 作用力的性质•作用力的性质和判断方法。
•弹力、摩擦力和引力的特点。
5.2 动量定律•动量定律的定义和表达式。
•动量定律与力学问题的应用。
5.3 动能定理•动能定理的定义和表达式。
•动能定理与动力学问题的应用。
5.4 质心运动•质心的概念和运动特点。
•质心运动与动量守恒的关系。
第六章动力学问题6.1 动力学问题的解法思路•动力学问题解决的思路和方法。
•实例分析和解决步骤。
6.2 一维动力学问题•一维动力学问题的求解方法和关键步骤。
•速度-时间图和位移-时间图的应用。
6.3 二维动力学问题•二维动力学问题的求解方法和关键步骤。
理论力学课后答案4
魏 魏 魏
后
泳 泳 泳
ww
涛 涛 涛
m
课
答
四川大学 建筑与环境学院 力学科学与工程系 魏泳涛
案
网
w.
kh
da
xi (2i 1)a cos , yi a sin 轨迹: xi2 yi2 a 2 2 (2i 1)
w.
co
解:以 A1 为对象研究 x a cos , y a sin 同理, Ai (i 2,3,4) 的运动方程为
kh
da
w.
co
我在沙滩上写上你的名字,却被浪花带走了;我在云上写上你的名字,却被风儿带走了;于是我在理论力 学的习题答案上写上我的名字.
4.8 飞轮边缘上一点 M ,随飞轮以匀速 v 10 m s 运动。后因刹车,该点以 at 0.1t m s 2 作减速运动。设轮半径 R 0.4m ,求 M 点在减速运动过程中的运 动方程及 t 2s 时的速度、切向和法向加速度。 解:
魏
at
2 2 v vx vy 2500 4t 2
泳 泳 泳
ww
涛 涛 涛
m
加速度的直角分量 ax 0 , a y 2 切向加速度为
dv 4t dt 2500 4t 2 当 t 0s 时, at 0 ,所以
2 2 an a 2 at2 ax ay at2 2 m s 2
我在沙滩上写上你的名字,却被浪花带走了;我在云上写上你的名字,却被风儿带走了;于是我在理论力 学的习题答案上写上我的名字.
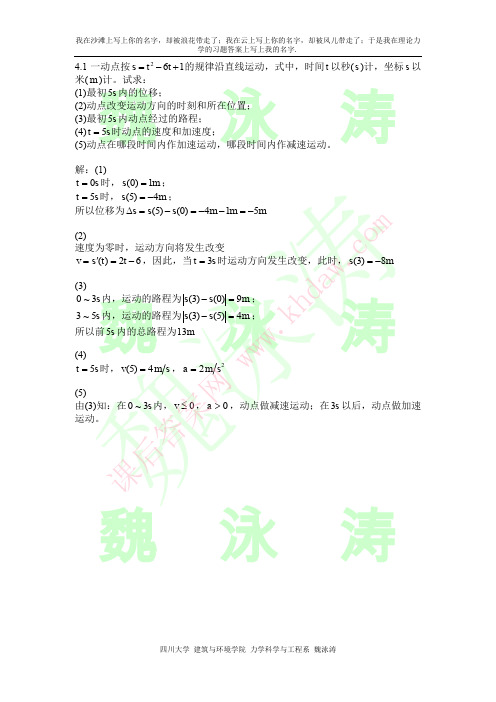
4.1 一动点按 s t 2 6t 1的规律沿直线运动,式中,时间 t 以秒( s )计,坐标 s 以 米( m )计。试求: (1)最初 5s 内的位移; (2)动点改变运动方向的时刻和所在位置; (3)最初 5s 内动点经过的路程; (4) t 5s 时动点的速度和加速度; (5)动点在哪段时间内作加速运动,哪段时间内作减速运动。
第4章 习题解答 哈工大习题册
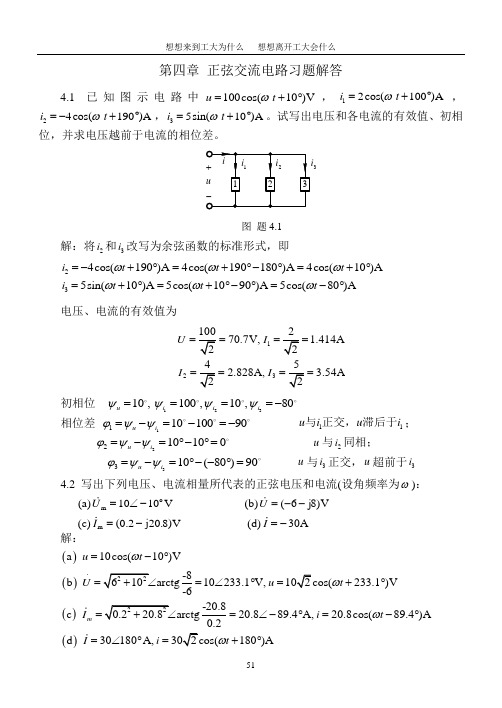
第四章 正弦交流电路习题解答4.1 已知图示电路中100cos( 10)V u t ω=+︒,12cos( 100)A i t ω=+︒,24cos( 190)A i t ω=-+︒,35sin( 10)A i t ω=+︒。
试写出电压和各电流的有效值、初相位,并求电压越前于电流的相位差。
3图 题4.1解:将2i 和3i 改写为余弦函数的标准形式,即234cos(190)A 4cos(190180)A 4cos(10)A 5sin(10)A 5cos(1090)A 5cos(80)A i t t t i t t t ωωωωωω=-+︒=+︒-︒=+︒=+︒=+︒-︒=-︒电压、电流的有效值为12370.7V, 1.414A 2.828A, 3.54AU I I I ========初相位 12310,100,10,80u i i i ψψψψ====-相位差 111010090u i ϕψψ=-=-=- 11u i u i 与正交,滞后于;2210100u i ϕψψ=-=︒-︒= u 与2i 同相;3310(80)90u i ϕψψ=-=︒--︒= u 与3i 正交,u 超前于3i4.2 写出下列电压、电流相量所代表的正弦电压和电流(设角频率为ω): (a)o m 1010V U =∠- (b)(6j8)V U =--(c)m (0.2j20.8)V I =- (d)I =-30A解:()()()().2a 10cos(10)V-8b arctg10233.1V,233.1)V -6-20.8c 0.2arctg 20.889.4A,20.8cos(89.4)A 0.2d 30180A,180)Am u t U u t I i t I i t ωωωω=-︒==∠︒=+︒==∠-︒=-︒=∠︒=+︒4.3 图示电路中正弦电流的频率为50Hz 时,电压表和电流表的读数分别为100V 和15A ;当频率为100Hz 时,读数为100V 和10A 。
哈尔滨工业大学 第七版 理论力学 第5章 课后习题答案

第5章 摩 擦5-1 如图5-1a 所示,置于V 型槽中的棒料上作用1力偶,力偶矩m N 15⋅=M 时,刚好能转动此棒料。
已知棒料重力N 400=P ,直径m 25.0=D ,不计滚动摩阻。
求棒料与V 形槽间的静摩擦因数f s 。
(a)(b)图5-1解 圆柱体为研究对象,受力如图5-1b 所示,F s1,F s2为临界最大摩擦力。
0=∑x F ,045cos 2s 1N =°−+P F F (1) 0=∑y F ,045sin 1s 2N =°−−P F F (2) 0=∑O M ,0222s 1s =−+M DF D F(3)临界状态摩擦定律:1N s 1s F f F =(4) 2N s 2s F f F =(5)以上5式联立,化得 0145cos s2s =+°−MPDf f 代入所给数据得01714.4s 2s =+−f f 方程有2根:442.4s1=f (不合理), 223.0s2=f (是解)故棒料与V 形槽间的摩擦因数223.0s =f5-2 梯子AB 靠在墙上,其重力为N 200=P,如图5-2a 所示。
梯长为l ,并与水平面交角°=60θ。
已知接触面间的静摩擦因数均为0.25。
今有1重力为650 N 的人沿梯向上爬,问人所能达到的最高点C 到点A 的距离s 应为多少?AN F As F(a)(b)图5-2解 梯子为研究对象,受力如图5-2b 所示,刚刚要滑动时,A ,B 处都达最大静摩擦力。
人重力N 650=W ,平衡方程: 0=∑x F , 0s N =−A B F F (1) 0=∑y F , 0s N =−−+W P F F B A(2)0=∑A M ,060cos 60sin 60cos 60cos 2s N =°−°−°+°l F l F Ws lPB B (3) 临界补充方程:A s A F f F N s = (4)B s B F f F N s =(5)联立以上5式,解得 N 80012sN =++=f WP F A ,N 200s =A F N 200)(12s N =++=W P f f F sB ,N 50s =B F l PF f W l s B 456.02)3[(N s =−+=5-3 2根相同的匀质杆AB 和BC ,在端点B 用光滑铰链连接,A ,C 端放在不光滑的水平面上,如图5-3a 所示。
理论力学---第四章空间力系习题

例4-11
已知:F、P及各尺寸
求: 杆内力
解:研究对象,长方板,列平衡方程
M
AB AE
F 0 F 0
F6 a
a 2
P 0 F6
F5 0
P 2
F D y 1 3 .0 3 K N
例 已知:各边长,载荷P、Q。 求:各杆的约束反力。 解:(1)考虑板的平衡,各杆均 为二力杆,设均受拉力。 (2)画受力图,建立坐标系,注 意各矢量的空间关系。 (3)列写平衡方程,空间一般力系有6个方程,尽量使 一个方程包含一个未知数。
M M
AB
F2 b
P F3 cos 45 b 0
F3 2 2 P
汽车后半桥传动轴,如图所示,A 处是向心推力轴承 (止推轴承),B 处是向心轴承(颈轴承)。设汽车匀 速直线行驶(平衡)。 已知:地面法向反力FD = 20 kN,锥齿轮上受的三个力 Ft = 117(kN),Fr = 36 kN,Fa =22.5 kN。齿轮节圆直 径 d = 98 mm,车轮半径R = 440 mm,尺寸如图。 求: 地面的摩擦力及两轴承的约束反力。
FOx Fx 0
F
y
0
FOy Fy 0
F
z
0
FOz Fz 0
100 FZ M x 0
30 FZ M y 0
100 Fx 30 Fy M z 0
M F 0
x
M F 0
y
M F 0
z
FOx 4.25kN, FOy 6.8kN, FOz 17kN
哈工大理论力学第四章PPT课件

主矩
由力对点的矩与力对轴的矩的关系,有
M O M x ( F ) i M y ( F ) j M z ( F ) k
F R x —有效推进力
F R y —有效升力
F R z
M Ox
M Oy
—侧向力 —滚转力矩 —偏航力矩
M O z —俯仰力矩
飞机向前飞行
飞机上升 飞机侧移 飞机绕x轴滚转 飞机转弯 飞机仰头
M y ( F ) M y ( F x ) M y ( F y ) M y ( F z ) F x z F z x M z(F )F yxF xy
M O (F ) x y F z z F y M x (F ) M O (F ) yzF x x F z M y(F ) M O (F ) z x F y y F x M z(F )
§4–3 空间力偶
1、力偶矩以矢量表示--力偶矩矢
F1F2F1F2
空间力偶的三要素 (1) 大小:力与力偶臂的乘积; (2) 方向:转动方向; (3) 作用面:力偶作用面。
MrBAF
2、力偶的性质 (1)力偶中两力在任意坐标轴上投影的代数和为零 . (2)力偶对任意点取矩都等于力偶矩,不因矩心的改
1.空间任意力系的平衡方程 空间任意力系平衡的充要条件:
该力系的主矢、主矩分别为零.
F x 0 F y 0 F z 0
M x 0 M y 0 M z 0
空间任意力系平衡的充要条件:所有各力在三 个坐标轴中每一个轴上的投影的代数和等于零,以 及这些力对于每一个坐标轴的矩的代数和也等于零.
第四章 空间力系
§4–1 空间汇交力系
1、力在直角坐标轴上的投影 直接投影法
Fx Fcos
Fy Fcos Fz Fcos
哈工大第七版理论力学课后思考题答案

集美大学诚毅学院机械1093期末复习材料理论力学(思考题答案)思考题i-i猛明下列戏子与丈宇的盘义和区別.(D科二孔,(2)幵一盼⑶力靳等效于力列,*W?答】⑴力乌和町,大小相等帯柯相岡g(2)N和&大小相萄⑶耐刑耳的夫小相等, 方向si^ats同亠1-2试X别片=眄|压和血=凤+骂两个等戎代表的意义。
【岸答】町一耐十用朮示朋是任意方向上箭个为门和A的合力洽力弘的大小和方问由平行四边形抚阳鴉定;打=片一%表示忌足同方向上蘭个力几和月的合.乩含力A的大小为F L和E的大小的和I方向与Fl和F.的方向科同3【解答】均有错•正确图如答1一1图。
1—3图1 - 1C1)〜1-1(0中各物体的受力番是否错谋?如何改正?1-4 刚体上△点受力尸作用.in 18 1-2所示,问罷否在。
点加一个力懐刚体平箕。
为什么?Ul 1 -2(a)也fS P= 0【解答1 不能。
当在E 点械抑力怖时,不能同时保订丿 1,故不能平衡B2JM= o1- 5 如摆】一3所冻结均•科丿JF 作用在E 点,至统能否乎猶?若力F 仍作用在丑点,袒可住 愆改变F 的方向,F 在什么方向上结购能平衡? 上匕解答】不能, 来/在如簷范围内可以令结构平鸳,如着? 一 3圖所示.1- 6 将如下间题抽象为力学模型,充分发挥你们的想象、分析和抽躱能力*试画出它心的力 学荒圏及受力<1)用两根细绳將B 光灯吊挂在天花板上»(?)水面匕的一块浮冰*G) 本打开的韦静止于桌面上; <4) 一个人坐在一只足球上*【解答】⑴⑵图1-4<4)u1 -7若将图1-5屮力F作用于三锻拱供较陡C处的请订上,所有物体里虽不计试分别画出左、右两拱茂销匚的受力圈八刃若傭订匚碾于AC•分别画岀汗、右两拱的受力图H3)若洌订C 属于EC,分鬧画出古、右两拱的量力阳°3 1-5mA2_1输亀钱普麦/相同时,电线下垂量片趙小■电线捷易亍拉Wh 为什么?【網答】可儒得J = F B =疵;=好也越小恥越小不和尸庞儿助以电线更易于拉2-2图2 — 1所赤时三种机构,构件自童不计9翅略靡擦,, 平力F,问Aifc 的妁京力是否相同。
哈工大第七版 理论力学

力的三要素
大小;方向;作用点 力是矢量。
F
矢量的长度表示力的大小; O 矢量的方向表示力的方向; 矢量的始端(点O)表示力的作用点。(矢量所 沿着的直线表示力的作用线) 常用粗体 F 表示力矢量,而用 F 表示力的大小, 若以 F 0 表示沿力作用方向的单位矢量,则 F=FF0 常用 N 和 kN 作力的单位符号
F1 FR F2
F1
FR
F1 F2
FR
F2
☆ 公理2
二力平衡条件
作用在 刚 体 上的两个力,使刚体保持平衡 的充分必要条件是:这两个力大小相等,方向相 反,且在同一直线上 即 F1 = - F2
F1
F2
☆ 公理3
加减平衡力系原理
在已知力系上加上或减去任意的平衡力系,不改变原力 系对刚体的作用。(效应不变)
F
A
A
F’ P
T1
P
T1’
T2
T2’
3.
光滑铰链约束
(1)向心轴承
轴可以在孔内任意转动,也可以沿孔的轴线移动; 但轴承阻碍着轴沿径向向外移动。
YA
XA F
A
约束反力的方向往往预先 不能确定,但是,无论它 朝向何方,其作用线必垂 直于轴线并通过轴心。 方向不能确定的约束反 力通常用两个未知的正 交分力 X 和 Y 表示。
这个公理阐明了变形体平衡的必要条件。
4. 约束和反约束力 限制非自由体某些位移的周围物体,称为约束。 约束对非自由体施加的力称为约束反力。约束反力的方 向与该约束所能阻碍的位移方向相反。画约束反力时, 应分别根据每个约束本身的特性来确定其约束反力的方 向。
5. 物体的受力分析和受力图是研究物体平衡和运 动的前提。 画物体受力图时,首先要明确研究对象(即取分 离体)。物体受的力分为主动力和约束力。当分析多个 物体组成的系统受力时,要注意分清内力与外力,内力 成对可不画;还要注意作用力与反作用力之间的相互关 系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12001.013
3300⋅−=××
−××
−=x M
m N 6.361.013
220020.0100⋅−=××+×−=y M m
N 6.1033.05
22002.013
3300⋅=××
+××=z M主矢N 4262R 2R 2R R =++=x y z F F F F ,N
z B
β
A
C
θ
β
F
1
F
2
F
(a(b
图4-5
解将力F分解为F1,F2,F1垂直于AB而与CE平行,F2平行于AB,如图4-5b所示,这2个分力分别为:
α
sin
1
F
F=,α
cos
2
F
F=
(
(
(
2
1
F
M
F
M
F
M
AB
AB
AB
+
=0
sin
1
+
⋅
=θ
a
Fθ
αsin
sin
Fa
=
4-6水平圆盘的半径为r,外缘C处作用有已知力F。力F位于铅垂平面内,且与C处圆盘切线夹角为60°,其他尺寸如图4-6a所示。求力F对x,y,z轴之矩。
350×
×
+
×
×
−
×
×
−
×
×
×
=
z
M
m
N
4.
19
mm
N
400
19⋅
−
=
⋅
−
=
主矩m
N
55.9
mm
N
900
55
2
2
2⋅
=
⋅
=
+
+
=
z
y
x
O
M
M
M
M
m
N
4.
19
1.
21
48
(⋅
−
+
−
=k
j
i
M
O
4-4求图4-4所示力F=1000 N对于z轴的力矩M z。
解把力F向x,y轴方向投影,得
N
507
35
3
000
解(1方法1,如图4-6b所示,由已知得
°
=60
cos
F
F xy,°
=30
cos
F
F
z
k
j
i
k
j
i
F F
F
F
F
F
2
3
4
1
4
3
60
sin
30
sin
60
cos
30
cos
60
cos−
−
=
°
−
°
°
−
°
°
=
C
y
°
60
F
°
30
z
O r°
30
°
30
x
(a(b
图4-6
3
(
4
30
cos
2
3
4
1
(r
h
F
r
F
Fh
M
x
−
=
解得
kN 4.26−==B A F F (压kN 5.33=C F (拉
x y
P
D
z
A
F C F °30°
45°
15C
°45B F O
(a (b
图4-7
4-8在图4-8a
所示起重机中,已知:
AB=BC=AD=AE ;点A ,B ,D和E等均为球铰链连接,如三角形ABC的投影为AF线,AF与y轴夹角为α。求铅直支柱和各斜杆的内力。
0=∑y F ,045sin =°−−CA F P (2
解得
P F CA 2−=(压,P F CB =(拉
=
∑x F,0
45
cos
45
cos=
°
−
°
A
B
F
F(1 0
=
∑y F,0
15
cos
30
cos
45
sin
30
cos
45
sin=
°
−
°
°
−
°
°
−
C
B
A
F
F
F(2
0=∑z F ,015sin 30sin 45sin 30sin 45sin =−°−°°−°°−P F F F C B A (3
P =10 kN
N 20N 15N 10N 20N 10N 1R =−−++=Σ=z F F N
20R k F =合力作用线过点(C x ,C y ,0
: mm
601010202030104015(201=×−×+×+×=C x mm
5.3240152010502030101015(20
1
=×−×−×+×+×=
C y 4-3图示力系的3个力分别为N 3501=F ,N 4002=F和N 6003=F ,其作用线的
x
y
E
°90D
B P
C
B
D
E
A
°
45A
θ
(a (b
A
x
y
1y z
E °45°
45D
BC
F BA
F
BD F BE F B
θ
CA
F BC
F ′z C
P °45y
(c (d
图4-8
解(1节点C为研究对象,受力及坐标系如图4-8d所示,其中x轴沿BC ,y轴铅直向上。
0=∑x F ,045cos =°−−CA CB F F (1
6.10250345(R k j i ++−=F主矩
m N 12222
2⋅=++=
z y x O M M M M ,m N 1046.368.51(⋅+−−=k j i O M
4-2 1平行力系由5个力组成,力的大小和作用线的位置如图4-2所示。图中小正方格
的边长为10 mm。求平行力系的合力。
解由题意得合力R F的大小为
位置如图4-3所示。试将此力系向原点O简化。
解由题意得
N 1442
1
6001001860350'R −=×
−×=x F N 0101866
.0600707.04001001880350'R =×+×+×
=y F N
517707.0400100
1890350'R −=×−−×
=z F主矢
N
14412
'R 2'R 2'R R =++=z y x F F F 'F
图4-4
E
N
517
011
1
144
(
R
k
j
i
F−
+
−
=
'
m
N
48
mm
N
000
48
120
707
.0
400
60
100
18
90
350⋅
−
=
⋅
−
=
×
×
−
×
×
−
=
x
M
m
N
07
.
21
mm
N
070
21
90
100
18
90
350⋅
=
⋅
=
×
×
=
y
M
60
2
1
600
90
866
.0
600
60
100
18
60
350
90
100
18
80
图
4-1
图4-2
图4-3
第4章空间力系
4-1力系中,F 1=100 N ,F 2=300 N ,F 3=200 N ,各力作用线的位置如图4-1所示。试将力系向原点O简化。
解由题意得
N 3455
2200132300R −=×
−×−=x F
N 25013
3
300R =×
=y F N
6.1051200100R =×
1=
×
=
y
F
N
169
35
1
000
1=
×
=
x
F
m
N
4.
101
mm
N
400
101
169
150
507
150
⋅
−
=
⋅
−
=
×
−
×
−
=
−
=
x
y
z
yF
xF
M
4-5轴AB与铅直线成α角,悬臂CD与轴垂直地固
定在轴上,其长为a,并与铅直面zAB成θ角,如图4-5a
所示。如在点D作用铅直向下的力F,求此力对轴AB的矩。
°
⋅
−
=
F
(
4
3
30
sin
2
3
4
3
(r
h