微机械振动陀螺隔离耦合的结构设计
微机械振动式陀螺仪灵敏度分析
nvri ie st y,2 02. 0
0 } 9 m ・f c
(0 1 l) u
图 2 微 机械振 动式陀螺仪动力学模型
可见 , 陀螺 仪 的灵 敏 度 与驱 动 电压 成正 比。 与
检测 质量块 的支撑 刚度 的 3 2方 成 反 比 , / 刚度 越 小
3 微 机 械 振 动 式 陀 螺 仪 灵敏 度 求解
微 机械振 动 陀螺仪 的灵 敏度 定义 为
数 , 为驱动 模 态 频 率 。" 物理 含 义 是 : 阶系 I T的 二
式陀螺仪的研制提供动力学参考。
参考 文献 :
[ ] 格 雷 戈 里 T A. 瓦 奇. 传 感 器 与 微 执行 器 全 书 1 . 科 微 [ . M] 北京 : 科学出版社 ,0 5 20 . [ ] 许宜 申, 2 王寿荣 , 盛平. 微机 械振动 陀螺 仪闭环 驱动 电
收稿 日期 :0 70 —7 2 0 - 1 7 基金项 目: 上海市教委科研资助项 目(6 Z 1 ) 0 E O 8 作者简介 : 孙玉 国(9 3一) 男 , 17 , 山东潍坊 人 , 博士 , 副教授。
2 微 机 械 振 动 式 陀螺 仪 运 动 微 分 方 程
微 机 械 振 动 式 陀 螺 仪 的 动 力 学 模 型如 图 2所 示 , 在 , 向上 的运 动微 分方 程为 它 y方
d l eu n y a q e c r f
近 年 来 , 着 ME 随 MS( coEet . caia Mi l r Mehnc r co l Ss m, 机 电系 统 ) 术 的发 展 , 种 利 用 表 面微 yt 微 e 技 一 加 工工 艺制 备 的微 型振 动式 陀 螺仪 已引起 业 内 的高 度关 注 ] 。与传 统 的 陀 螺 仪 相 比, 微 振 动 式 陀 硅 螺仪 具有 体 积小 、 成 度高 、 集 制造 成 本低 等 优点 。可 望在 飞机 、 船及 汽 车 自主式 惯 性 导 航 系 统 中得 以 轮 应用 J 。硅微 振 动 式 陀 螺 仪 的研 发 涉 及 微 电 子 学 、 导 体工 艺 、 机 构等 诸 多领 域 。其 中 , 何 提 半 微 如
有机械耦合的电容式硅微陀螺敏感信号读取研究
量转 动 角 速 度 的传 感 器 。 由 力 学 原 理 可 知 , 刚 体 转 动 由 ( 角速 度 ) 平 动 ( 速 度 V) 可产 生 一 正 交 的加 速 度 和 线 r, ( 科利 奥里 加速 度 , 氏加速 度 口) 图 1 示 。 科 如 所
Z
结构特点决定了机械耦合误差并不能被彻底消除。
0 引 言
硅微机械传感器是用半导体硅加工工艺实现 的传感 器 。体积 小使 其 获得 广 泛 的应 用 前 景 。但 是 由 于体 积 小 ,
微小 的绝 对 机械误 差却 产 生 较 大 的相 对 误 差 , 来 运 动 交 带
互 干扰 , 机械 耦 合 问题 。电容 式硅 微 机 械陀 螺 是用 于 测 即
b t e r i g d r c i n a d s n i g d r c in i n ti e ia l.Th i i i o p i g b t e r i xs a d s n i e we n d i n ie t n e sn ie to o n v t b e v o s e rg d t c u l e we n d i n a i n e s n y n vg g
wh n t e c u l n e f r n e i mi i 1 An t e t o s t t p d i i g sg a n s m p e t . Two me h d e h o p i i t r e e c s g n n ma . o h r me h d i o so rv n i n l i a l i me to s
石英微陀螺的机械耦合问题研究
定了机械耦合误差并不能被彻底消除。要想有效抑制机械耦合 , 必须对其有一个全面的认识。本文针 对石英微陀螺, 建立理想和非理想陀螺的结构模型并进行对 比, 通过仿真试验 , 探讨机械耦合对陀螺性 能的影响 , 以求对微陀螺中的机械耦合有更进一步的了解 。
t 收 稿 日期 :06— 9 5 2O 0 —0
维普资讯
第 2 卷第 1 9 期
微机械开放式射流陀螺的敏感原理和数值仿真

微机械开放式射流陀螺的敏感原理和数值仿真朴林华;朴然;常兴远;胡永辉【摘要】提出了一种基于开放式气流通道的微机械射流陀螺的设计、敏感原理和数值仿真.敏感元件内部气流的运动采用基于流固耦合的三维瞬态数值分析计算,计算和测试结果表明:①气流在压电泵的驱动下,由开放式气流通道的两个入口进入并汇聚,由喷口喷出并在射流敏感室形成射流敏感体,在入口和出口之间形成定向流动.②射流敏感体在哥氏力的作用下发生偏转,与作为电桥臂的热线发生热量交换,导致电桥输出与输入角速度成正比的不平衡电压.③陀螺灵敏度为SFZ=2.0μV/°/s,非线性度优于0.5%.%The design,sensitive mechanism and numerical simulation of an fluidic gyroscope based on MEMS with an open airflow channel are reported. The 3D transient numerical analysis based on the fluid-structure interaction was used to calculate the movement of airflow in the sensitive el ement. Calculations and results indicated that:①With the drive of piezoelectric pump,the airflow flows into the open airflow channel through two inlets and then gather together. Then,the airflow flows through the nozzle and forms the sensitive jet flow in the fluidic sensing cavi-ty,thus there is a directional flow between inlets and outlet.②Sensitive jet flow deflects because of the Coriolis Force and exchanges heat with the hotwires which forms the Wheatstone bridge. Therefore,Wheatstone bridge out-puts an unbalanced voltage proportional to the applied angular velocity. ③The sensitivity of mentioned gyroscope is SFZ=2.0 μV/°/s,and simultaneously,the nonlinearity is better than 0.5%.【期刊名称】《传感技术学报》【年(卷),期】2017(030)010【总页数】5页(P1483-1487)【关键词】射流陀螺;开放式气流通道;MEMS;角速度;热线【作者】朴林华;朴然;常兴远;胡永辉【作者单位】北京信息科技大学北京市传感器重点实验室,北京100101;北京工业大学信息学部,北京100124;北京信息科技大学北京市传感器重点实验室,北京100101;北京信息科技大学北京市传感器重点实验室,北京100101【正文语种】中文【中图分类】TP212.1陀螺是敏感角速度、角加速度和角度等角参数的惯性传感器,在载体运动姿态测量和控制中始终是核心部分之一。
基于隔振结构的微型振动机器人设计与实验
基于隔振结构的微型振动机器人设计与实验
陈波;甘中学;欧阳春;周子清
【期刊名称】《传感器与微系统》
【年(卷),期】2024(43)6
【摘要】为了增强振动机器人的运动性能,设计了一种基于隔振结构的振动驱动机器人。
该机器人结构主要由机器人主体、隔振结构和驱动足组成。
首先,设计了2种不同的隔振结构,通过理论分析进行对比;然后,介绍了振动驱动的运动原理,由振动电机产生的离心力进行驱动;最后,制作了振动机器人样机并且进行了实际测试,通过对机器人的直线运动、旋转运动、不同地形上的运动、越障和负载进行测试,对隔振结构进行了性能对比,选取了性能更加优越的Z型隔振结构,同时对机器人的性能进行了评估,它在玻璃上的最大速度为181.34 mm/s,能够承载高达300 g的负载,这说明了所设计的隔振结构的有效性,为振动机器人的设计提供了新的思路。
【总页数】5页(P64-68)
【作者】陈波;甘中学;欧阳春;周子清
【作者单位】复旦大学工程与应用技术研究院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.基于结构明置基础竖向振动复合集总参数模型的被动隔振设计方法
2.船用隔振结构的实验室振动响应模拟试验系统设计
3.基于交通振动环境下建筑结构损伤机理及减振隔振的研究现状
4.基于TRIZ的振动时效机器人用多维隔振装置设计
因版权原因,仅展示原文概要,查看原文内容请购买。
振动式微陀螺正交误差自补偿方法
振动式微陀螺正交误差自补偿方法刘学;陈志华;肖定邦;吴学忠;苏剑彬;侯占强;贺琨【摘要】微陀螺正交误差会影响陀螺的零偏稳定性,为了提高微陀螺的性能,必须减小正交误差.针对正交误差处理中存在的问题,推导了包含交叉耦合误差效应的驱动模态和检测模态的动力学方程,研究了交叉耦合误差引起的正交误差表达式,提出了一种正交误差闭环控制自补偿方法.通过将经正交误差幅值调幅控制的驱动位移信号闭环反馈作用到检测模态的输出,实现正交误差的自补偿.制作PCB电路测试了微陀螺的性能.正交误差自补偿后微陀螺零偏输出均值从778 mV减小到了2 mV,零偏稳定性从75°/h提高到了34.5°/h.实验结果表明,此方法是可行的.%The quadrature error results in poor zero bias stability,to improve the performance of the micro-gyroscope the quadrature error must be reduced. The kinetic equation contains the cross-coupling error in drive-mode and sense-mode were introduced, the expressions of the quadrature error induced by the cross-coupling were analyzed. A simple, yet effective approach to suppress the quadrature error was presented. The amplitude of the quadrature error had been picked up to amplitude modulate the displacement of the drive-mode, then it is injected into the output of the sense-mode, thus the quadratura error can be self-compensated. Experimental results show that the proposed solution decreases the zero bias output from 784 mV to 2 mV and increases the stability of zero bias from 75?h to 34. 5?h.【期刊名称】《传感技术学报》【年(卷),期】2012(025)009【总页数】5页(P1221-1225)【关键词】微机电系统;正交误差;自补偿;振动式微陀螺;交叉耦合【作者】刘学;陈志华;肖定邦;吴学忠;苏剑彬;侯占强;贺琨【作者单位】国防科学技术大学机电工程与自动化学院,长沙410073;国防科学技术大学机电工程与自动化学院,长沙410073;国防科学技术大学机电工程与自动化学院,长沙410073;国防科学技术大学机电工程与自动化学院,长沙410073;国防科学技术大学机电工程与自动化学院,长沙410073;国防科学技术大学机电工程与自动化学院,长沙410073;国防科学技术大学机电工程与自动化学院,长沙410073【正文语种】中文【中图分类】TN492微陀螺具有体积小、重量轻、成本低,易于实现批量生产等特点,在惯性制导系统中具有广泛应用,是惯性传感器发展的热点方向之一。
2024年度-20陀螺课件(共33张PPT)pptx
MEMS技术发展趋势
随着MEMS技术的不断发展,其应用领域不断拓展,同时向着更高性能、更低功 耗、更小体积的方向发展。
5
陀螺发展历程及现状
发展历程
从最早的机械陀螺到现代的光学陀螺和微机械陀螺,陀螺技术经历了不断的发 展和创新。
现状
目前,光学陀螺和微机械陀螺已成为主流,具有高精度、高可靠性、小型化等 优点。同时,随着人工智能、物联网等技术的发展,陀螺的应用领域也在不断 扩展。
6
02 陀螺仪结构与工 作原理 7
陀螺仪基本结构组成
手段提高陀螺仪的测量精度和稳定性。
10
03 光学陀螺技术及 应用 11
光学陀螺概述及分类
01
02
03
光学陀螺定义
利用光学原理测量角速度 的装置。
光学陀螺分类
根据测量原理不同,可分 为干涉式、谐振式和受激 布里渊散射式等。
光学陀螺应用领域
航空、航天、航海、兵器 等领域中的导航、制导和 控制等。
12
的需求。
22
06 未来发展趋势与 挑战 23
新型陀螺技术研究方向
光学陀螺技术
利用光学原理,研究高精 度、高稳定性的光学陀螺 ,提高测量精度和抗干扰 能力。
微机电陀螺技术
通过微纳加工技术,制造 微型化、低功耗的陀螺仪 ,满足便携式设备和微型 飞行器等领域的需求。
原子陀螺技术
基于原子干涉原理,研究 高灵敏度、高分辨率的原 子陀螺,为高精度导航和 定位提供技术支持。
利用光学谐振腔的旋转多普勒效应,通过测量谐振腔中顺时针和 逆时针传播的两束光的频率差来检测角速度。
振动式微机械陀螺的带宽特性分析
c e s fd iea d s n e mo e t h,t e b n wi t n r a e isl ra eo rv n e s d sma c h a d d h i ce s sfr t y,a d t e e p c n tn . A st e n h n k e o sa t h
b t e rv n e s d s u lo t e d mp n o fi in sma c e we n t d s e we n d i e a d s n e mo e ,b tas h a i g c e f e t t h b t e wo mo e .W i h e c t t ed — h
Th n wi h Cha a trsisAn l sso b a o y M i r m a hi e r s o eBa d dt r ce itc a y i fa Vi r t r c o c n d Gy o c pe
LU ebn, U a - i CH EN e— n CH EN o g , AN a Xu - i LI Xi owe ’, W ipi g, H n H Ti n
维普资讯
第2 1卷
第 2期
传 感 技 术 学 报
C NE E OU HI S J RNA S NS RS A L OF E O ND ACT AT S U OR
Vo . 1 No 2 12 . F b 2 0 e 动 式 微 机 械 陀螺 的带 宽 特 性 分 析
陆学斌 , 晓为 陈伟平 , 宏 , 刘 , 陈 韩 天
( 哈尔滨工业大学 ME MS中心 , 哈尔滨 1 0 0 ) 50 1
摘 要 : 对振动式微机械陀螺的带宽特性进行了讨论, 以设计的一种带解耦结构的振动式微机械陀螺为模型 , 利用数学工具
基于滑膜阻尼的间接连接型音叉式微机械陀螺
制作 有栅型可动 电极 , 玻璃衬 底上叉 指形 的 固定 电极构成 与
差 分检测 电容 。
性 粱
间耦合弹性梁 直接 连接 的 , 方式较简单 , 是在检测方向上存 但
在一个 干扰模 态 , 影响 了测 量的精确性 ; 文献 [ 一l 述微 8 O所 3 陀螺属于间接连接 型, 此类陀螺驱动质量通 过质量块一 弹簧结 构间接相连 , 有效地避免了干扰模态的影 响, 但是 陀螺的空气
基金项 目: 国家 83计划资助项 目(0 6 A Z 0 )高等学校博 士学科点专项科研 基金资助 项 目(0 7 2 7 0 ) 中国博 6 20A 0 33 ; 4 2 0 04 06 ;
士后科学基金资助项 目(0 8 4 0 8 ) 2 0 0 3 6 7
作者简介 : 文永蓬 (9 9一)男 , 17 , 江西人 , 博士研究生 , 研究方 向为微结构设计方法及 动力 学 ; 王安麟 (9 4一)男 , 15 , 教授 , 博
阻尼 是压 膜 阻 尼 , 有 较 大 的 能 量 损 失 以 及 较 低 的 Q值 。本 具
文介绍 了一个新颖 的多 自由度 面 内音 叉振动 式微 陀螺 , 该陀
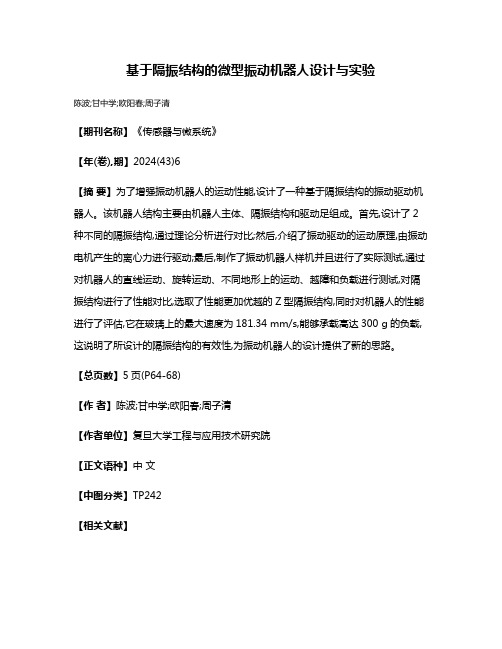
图 1 音叉 式微 陀螺结构简 图
收 稿 日期 :0 80 —0 修 订 1期 :0 80 .0 20 —53 ; 5 2 0 61 1
于加工误差具 有较好的健壮性 。
测质量块 、 动 和检测模 态 共用 一个 弹簧 梁… , 量精 度 不 驱 测
高。近年来 , 随着硅微 机械加工 技术 的发 展 , 出现 了表 面微加
2 微 陀螺结构及工作原理
图1 所示是驱 动和检测都是面 内的新颖 的硅微 陀螺的结 构简 图, 微陀螺 由对 称 的左 、 该 右结构 以及连 接左 、 右结构 的 中问结构组成 。左 / 右结构包 含一个驱动质量块 、 一个 检测 质 量块 以及 四个驱动 弹性梁 , 中间结构 包含两个 中间连接质 量
一种基于PWM技术的微机械陀螺闭环驱动电路设计
一种基于PWM技术的微机械陀螺闭环驱动电路设计作者:孙冬娇孟瑞丽刘恒来源:《现代电子技术》2013年第16期摘要:针对微机械振动陀螺驱动控制电路中的幅频控制要求,提出了在高品质因数下,基于PWM技术的陀螺自激驱动控制方案,并建立了系统行为分析模型。
鉴于系统的高阶非线性,采用平均周期法分析了系统的行为,根据理论分析设计了闭环驱动电路。
理论分析和实验表明:闭环系统是稳定的,改变占空比可以调节振动幅度;在上电随机噪声下,自激振动幅度在1 h内向上漂移约为0.02%。
关键词:陀螺;自激;恒幅振动; PWM中图分类号: TN911.71⁃34 文献标识码: A 文章编号: 1004⁃373X(2013)16⁃0098⁃03微机械振动陀螺驱动电路的功能是产生驱动电压使陀螺的可动质量块沿驱动方向以一定的频率做恒幅简谐振动,同时还为角速率检测电路的解调提供参考信号,因此保持陀螺驱动轴振动速度幅度的稳定性对于提高陀螺整体性能非常重要。
为了保证陀螺驱动轴的振幅稳定,需对陀螺进行闭环控制,保证陀螺始终在驱动轴的谐振频率上振动,同时振动幅度恒定。
对于高品质因数微机械振动陀螺的闭环驱动,频率跟踪主要有锁相技术和自动选频技术。
锁相技术根据相位差不断调整驱动电压的频率来实现频率跟踪。
当品质因数较大时,陀螺驱动模态的动力学模型等效为一个窄带滤波器,只有交流驱动电压频率与振梁谐振频率一致或相近时,输入才会得到放大。
锁相技术远比自动选频技术复杂,同时,电路上的随机噪声中同谐振频率一致的分量会得到不断增强,其他则不断衰减,目前多采用很少元器件构成的上电自激电路的自动选频来保证频率跟踪[1⁃3]。
对于恒幅振动的控制,多采用自动增益控制方法,通过检测振动信号的幅度与设定的参考幅度相比来自动调节驱动电压的幅度。
无论是自动调节直流驱动电压幅度还是交流电压幅度,均需要外部参考直流电压[4⁃6]。
鉴于上述分析,本文拟采用基于PWM技术的自动增益控制方式,参考电压来自于输出检波幅度,减少了对元器件的需求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第22卷 第4期华侨大学学报(自然科学版)V ol .22 N o .4 2001年10月Journal of H uaqi ao U ni versi t y (N atural Sci ence)O ct.2001 文章编号 1000-5013(2001)04-0380-05微机械振动陀螺隔离耦合的结构设计李 文 望(鹭江大学机械系,厦门361005)摘要 微机械振动陀螺是新型的惯性元件.其误差源主要有微机械结构的B row ni an 噪声、电路噪声、机械耦合误差,以及电子机械耦合误差等.这些误差严重影响着陀螺仪的精度.由于制造误差等引起的机械耦合误差,可以通过改善陀螺仪的结构来减小耦合误差.文中从结构设计方面,提出单级隔离耦合和双级隔离耦合的结构方案,有效减小机械耦合误差,提高了精度.关键词 微陀螺,机械耦合误差,隔离耦合中图分类号 T H 824+.301文献标识码 A微机械振动陀螺,是一类难度较大的微机电系统(M E M S ).这种新型陀螺仪具有体积小、重量轻、可靠性高、抗冲击、易于数字化和智能化等一系列优点.提高机械振动陀螺的精度、图1 振动陀螺集中参数模型灵敏度和降低费用,是研究的重点.1 机械振动陀螺仪的工作原理及机械耦合原理1.1 机械振动陀螺仪的工作原理〔1,2〕微机械振动陀螺可以简化为质量-弹簧-阻尼集中参数系统.它一般由振动质量和梁组成,振动质量可以在两个正交方向自由振动.图1是振动陀螺的集中参数模型.当质量块受到外力的作用沿x 轴方向振动,且整个模型在基座带动下以角速度为Ω旋转时,质量块会受到沿y 轴方向的哥氏惯性力的作用,从而使质量块沿y 轴方向振动.两个方向的运动方程分别为m x +c x x +k x x =F 0sin ωt ,(1)m y +c y y -2m Ωx +k y y =0,(2)m 代表质量,c x ,c y 分别表示x ,y 方向的粘性阻尼,k x ,k y 分别表示x ,y 方向的弹簧刚度.当质 收稿日期 2001-07-04 作者简介 李文望(1962-),男,讲师基金项目 福建省自然科学基金资助项目;厦门大学自选课题科研基金资助项目量块以其固有频率振动时,由式(1)和(2)可得x (t )=-x m cosωx t ,y (t )=2m Ωωx x m k y ·si n (ωx t -φ){1-(ωx /ωy )2}2+(ωx /ωy )2,其中x m =F 0Q x k x ,φ=t an -1λQ y (1-λ2),λ=ωx ωy ,Q x =m ωx c x ,Q y =m ωy c y .1.2 机械耦合原理〔1〕微机械振动陀螺的质量块和梁由于存在制造误差,一般不能完全对称.因此,驱动振动的能量会传递给y 方向,导致两个方向振动的耦合.这种耦合取决于驱动振动的振幅和速率,其运动方程分别为m x +(c x -c c )x +c c y +(k x -k c )x +k c y =F 0si nωt ,my +(c y -c c )y +(c c -2m Ω)x +(k y -k c )y +k c x =0,其中k x 和c c 分别为振幅和速率的耦合系数.当c c 很小,且Ω=0时,其运动方程为mx +c x x +(k x -k c )x =F 0sinωt ,m y +c y y +k y y +k c x =0.这里,c c =0,x y ,k x k c ,且Ω=0.当质量块以其固有频率振动时,方程的解为x (t )=-x m cosωx t ,y (t )=-(k c x m /k y )·si n (ωx t -φ)/{[1-(ωx /ωy )2]2+(ωx /Q y ωy )2}.图2 耦合运动轨迹当φ=0(或180°)时,质量块沿着与x 轴成一个角度作直线运动,如图2(a)所示〔3〕.另一方面,当k c很小且Ω=0时,其运动方程为m x +c x -c c )x +k x x =F 0sin ωt ,m y +c y y +c c x +k y y =0.这里,k c =0,x y ,c x ,c y c c ,且Ω=0.当质量块以其固有频率振动时,方程的解为x (t )=-x m cosωx t ,y (t )=(c c Ωx x m /k y )·cos(ωx t -φ){1-(ωx /ωy )2}2+(ωx /Q y ωy )2.当φ=0(或180°)时,质量块的运动轨迹为椭圆,如图2(b)所示〔3〕.分析结果表明,对于微机械振动陀螺,机械耦合的类型可以通过质量块的振动形式来确定.2 隔离耦合的微机械振动陀螺的结构设计以梳状驱动平板式振动陀螺为例,对隔离耦合的微机械振动陀螺的结构设计进行分析.图3所示是结构简单的、没有隔离耦合的梳状驱动平板式振动陀螺.带有梳状电极的长方体多晶硅平板,通过挠性支臂与单晶硅底座相连,并被支悬在底座的上方.当在固定的梳状电极上施183第4期 李文望:微机械振动陀螺隔离耦合的结构设计图3 梳状驱动平板式振动陀螺加带有直流偏置,但相位相差180°的交流电压时,将产生沿驱动轴交变的静电驱动力,从而引(a )驱动模态振动形式 (b )检测模态振动形式图4 没有隔离耦合的振动模态起平板沿驱动轴作交变的线振动.当壳体绕输入轴以角速度Ω相对对惯性空间转动时,将形成沿输出轴交变的哥氏惯性力.由此引起平板沿输出轴作线振动,且振幅与输入角速度Ω成正比.此振幅可由平板与底座之间的电容的变化检测,其驱动模态和检测模态的振动形式,如图4所示〔4〕.2.1 单级隔离耦合的结构设计单级隔离耦合的梳状驱动平板式振动陀螺的结构,如图5所示.它的特点是驱动部分和检测部分有各自独立的梁,振动质量通过4条梁(内梁)支撑与支悬在底座上方的框架连接.其它结构与没有隔离耦合的梳状驱动平板式振动陀螺一样.陀螺仪工图5 单级隔离耦合结构作时,对于驱动的振动形式,外梁沿着x 方向弯曲,而内梁不会产生变形.对于检测的振动形283 华侨大学学报(自然科学版) 2001年式,内梁沿着y 方向弯曲,外梁不会产生变形.这表明了外梁和内梁各自对y 和x 方向有很好的刚度,它们在两种振动形式中有各自的独立性.由于驱动的振动形式对检测部分的梁没有影响,所以它们之间的机械耦合就很弱.单级隔离耦合的梳状驱动平板式振动陀螺驱动模态和检测模态的振动形式,如图6所示.图6 隔离耦合的振动模态2.2 双级隔离耦合的结构设计经过对单级隔离耦合的梳状驱动平板式振动陀螺的分析可以看出,检测模态的质量运动有两个自由度.这样固联在振动质量的检测电极反映了两个方向的运动,从而存在着另一个误差源.为了解决这个问题,可以采用双级隔离耦合,其结构如图7所示〔2〕.当陀螺仪工作图7 双级隔离耦合结构383第4期 李文望:微机械振动陀螺隔离耦合的结构设计时,振动质量一方面随驱动力的交变沿着x 方向振动,另一方面在哥氏惯性力的作用下沿着y 方向.右边的检测部分单独支悬在底座上,通过梁5和梁4与振动质量相连,使得检测部分只有沿着y 方向的振动,隔离了x 方向的振动.3 结束语采用隔离耦合的设计,可以大大降低由于制造误差使结构不对称引起的藕合.同时,还可以降低检测模态的振动影响梳状驱动电极间的电场对称,降低“悬浮效应”.这样,可大幅度提高陀螺仪的精度.参 考 文 献1 M ochi da Y ,T am ura M .A m i crom achi ned vi brati ng rat e gyroscope w i th i ndependent beam f or t he dri veand detect i on m odes[J].Sensors and A ct uators,2000,(80):170~1782 K aw ai H ,A t suchi K I ,T am ura M .H i gh -resol ut i on m i crogyroscope usi ng vi bratory m oti on adj ust m entt echnol ogy [J ].Sensors and A ctuators ,2001,(90):153~1593 G ei ger W ,F ol km er B.N ew desi gns m i crom achi ned vi brati ng rat e gyroscope w i th decoupl ed osci l l ati onm odes [J ].Sensors and A ct uators ,1998,(66):118~1244 阮爱武.硅微机械陀螺仪的新进展及其方案分析[J].中国惯性技术学报,1998,6(2):67~72S tru ctu ral D esig n o f S pac er C o u pling fo r a M icro m achinedV ib rating G y ro sc o peL iW enw ang(D ept.of M ech.E ng.,L uj ang C ol l ege,361005,X i am en)A bstrac t M i crom achi ned vi brati ng gyroscope i s a new type i nert i al com ponent.I ts error source i ncl udesB row ni an noi se ,ci rcui t noi se ,error of m echani cal coupl i ng ,and error of el ectro -m echani cal coupl i ng of m i cro-m achi ned st ruct ure.T hese errors seri ousl y aff ect the preci si on of gyroscope.A m ong them ,the error of m e-chani cal coupl i ng ,w hi ch com es from structural unsym m etry due t o m enuf acturi ng error ,can be reduced by i m provi ng structure of gyroscope.F rom structuraldesi gn,t he author proposes structural pl an of si ngl e spac-er coupl i ng and doubl e spacer coupl i ng .B y w hi ch the error of m echani cal coupl i ng can be ef f ecti vel y reduced and the preci si on can be i m proved .Key w ords m i crogyroscope,error of m echani cal coupl i ng,spacer coupl i ng 483 华侨大学学报(自然科学版) 2001年。