随机路面仿真模型的建立
基于轿车动力总成NVH性能研究
、
为在第 f 个局部坐标系中三个弹性主轴
由上 式可 以看 出这两 个方 程存在 动力 耦合 。即底盘 的运 动影 响 了动力 总成 的运动 , 同样 ,动力 总成 的
运 动 也对底 盘 的运动 产 生影 响 。 方 程 ( . )写成 将 18
上 的刚度 。
C C 、c 小 。为在第 i 个局部坐标系中三个弹性主轴
首先作用在底盘悬架系统上,通过悬架将振动传递
给 发动 机 。用广 义 向量表 示 :见 16式 -
=
。
,
,
。
,
(-) 16
在 广 义坐标 系 中 ,设 有微 小 的振 动 ,依方 程 ( - ) 15
建立动力总成和底盘的运动方程 即:
图 2 动 力 总 成 重 心 的 平 动 位 移 和 转 动 位 移
(—) 17
其 中 :M1 力 总成 的质 量矩 阵 ; M2 盘 的质量 一 动 . 底
而每 个悬 置 的 刚度k 阻尼C 局 部坐 标系r / 和 在 j 以 中可
矩阵;C. 1 动力总成的阻尼矩阵;Kl - 动力总成的刚 度矩阵; K . 2 底盘的刚度矩阵;q来 自路面 的随机 .
b t i ci so et a a drtt ca kh f whc ra ya etr igq a t fce . h o rt i oh d et n fvr cl n oae rn sa i get f c i n u l o rw T ep we r n r o i t h l d i y a
涉及车辆多个系统的相互作用 。本文就动力 总成与悬架等子系统存在振动耦合 ,建立动力总成和底盘 的耦合振动 模 型。在 MA L B s ik下仿真表 明,动力总成悬置系统 N T A /i n ml VH 性能主要集中在竖直和绕 曲轴转动这两个方 向
ADAMS CAR不同轮胎模型的整车平顺性分析实例

ADAMS/CAR不同轮胎模型的整车平顺性分析实例在相同条件下,对使用不同轮胎模型的整车模型进行平顺性仿真。
仿真结束后,在后处理模块获得汽车底盘质心处x 、y 、z 三个轴向的加速度曲线。
为了确定路面引起汽车振动所在的频率范围,还需获取相应的加速度功率谱密度。
最后,求加速度加权均方根值,评价振动对人体的影响。
目录第一章、参考资料 (1)第二章、建模说明 (5)一、生成5.2.1前轮胎模型 (5)二、生成5.2.1后轮胎模型 (9)三、生成其他三个轮胎模型 (10)四、生成整车模型 (12)第三章、仿真分析 (16)一、平顺性仿真概述 (16)二、随机路面生成 (16)三、平顺性仿真条件设置 (16)四、仿真过程 (17)第四章、结果分析 (19)一、概述 (19)二、操作说明 (20)三、同等条件下,不同轮胎模型的汽车平顺性比较 (27)四、同等条件下,不同车速的汽车平顺性比较 (34)五、同等条件下,不同路面的汽车平顺性比较 (37)第一章、参考资料在ADAMS虚拟样机仿真软件中按照实际使用情况可将轮胎模型分为操作性分析轮胎模型、耐久性分析即3D接触分析轮胎模型以及摩托车用轮胎模型三大类。
由于本文中主要研究的是轮胎与路面间垂直力所引起的冲击振动情况,故应选用操纵性分析轮胎模型,其使用的是point follower的方式来计算轮胎由于路面不平激励所引起的垂直力。
在操纵性分析轮胎模型组中提供了MF-tyre、Pacejka ’89、Pacejka ’94、PAC2002、Fiala、5.2.1以及UA等轮胎模型,用户可以根据实际需要对模型数据进行修改。
通过修改软件自带的轮胎模型文件来生成轮胎模型能够保证车辆仿真要求的一致性,从而保证仿真结果的可靠性。
第二章、建模说明一、生成5.2.1前轮胎模型为建立轮胎模型,需先将acar共享文件中需要的轮胎数据复制到个人文件夹,本文进行汽车平顺性分析,适用于平顺性分析的轮胎模型有MF-tyre、Pacejka ’89、Pacejka ’94、PAC2002、Fiala、5.2.1以及UA等轮胎模型,本文选取4种类型:521_equation、mdi_fiala01、mdi_pac94、uat。
关于路面不平度重构的研究
T NOLO GY TR N D[摘要]通过对GB7031-1986建议的公路路面功率谱密度的拟合表达式进行研究,可以得出采用谐波叠加法进行模拟得到的路面不平度所对应的功率谱密度可以很好地逼近目标谱的结论。
[关键词]谐波叠加;路面不平度;仿真在进行汽车动力响应分析和平顺性研究中,时域路面模型日益受到重视,因为路面输人模型能否准确的反映实际研究的路面对分析研究的准确性有着根本的影响。
所以,建立合理的路面输人模型是进行汽车平顺性和操稳性研究需首先解决的问题之一。
对于时域内的路面激励(也即路面不平度或高程)可以利用路面不平度数据和汽车行驶速度获得,获得方法有:1)试验测试方法;2)将给定的路面功率谱密度变换为路面不平度。
本文通过对GB7031-1986建议的公路路面功率谱密度的拟合表达式进行研究后,采用谐波叠加法进行模拟得到的路面不平度所对应的功率谱密度可以很好地逼近目标谱。
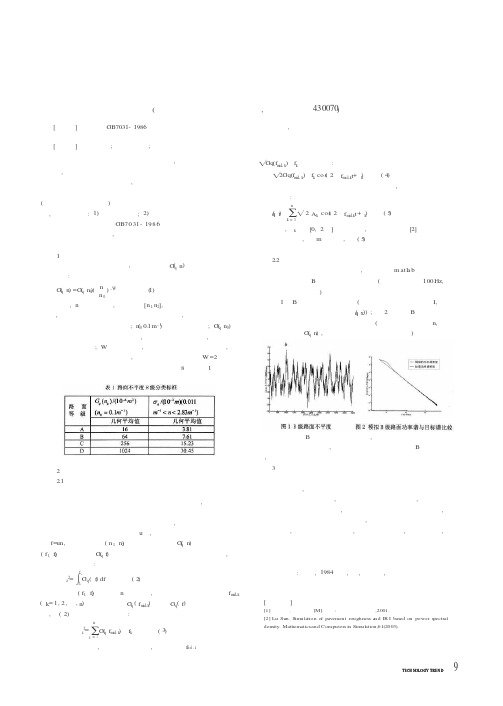
1路面不平度的功率谱密度的描述根据国际标准化组织文件,功率谱密度G q (n )可以用下式作为拟合表达式:G q (n )=G q (n 0)(n n 0)-W(1)式中,n 为空间频率,其带宽为[n 1,n 2],分别为有效频带的上限和下限,带宽的确定应保证汽车在一平均速度行驶时,不平度引起的振动要包括汽车振动的主要固有频率;n 0(0.1m -1)为参考空间频率;G q (n 0)为参考空间频率下的路面功率谱密度,称为路面不平度系数,数据取决于公路的路面等级;W 为频率指数,为双对数坐标上斜线的频率,它决定路面功率谱密度的频率结构,分级路面铺的频率指数W =2。
国际标准化组织提出了把路面的不平度分为8级。
表1列举出了部分等级路面的功率谱密度值及几何平均值。
表1路面不平度8级分类标准2谐波叠加算法模拟路面不平度2.1谐波叠加法模型的建立谐波叠加法是将随机激励表示成大量具有随机相位的正弦或余弦之和。
本文采用余弦谐波叠加法生成路面不平度仿真数据,其主要思想就是将路面不平度表示成大量具有随机相位的余弦级数之和。
基于Simulink的14车辆悬架建模及仿真
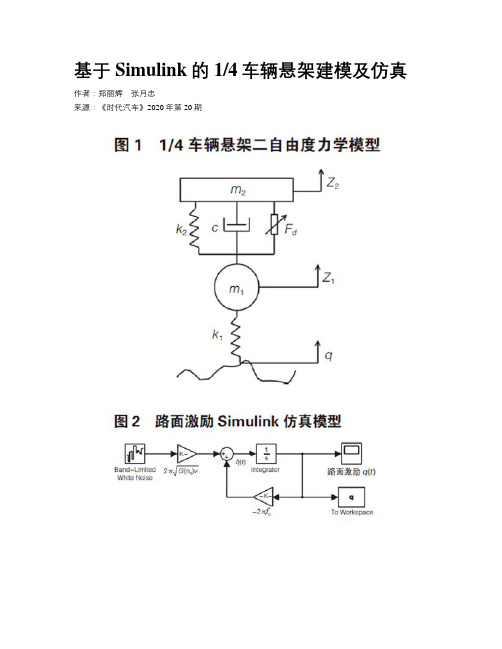
基于Simulink的1/4车辆悬架建模及仿真作者:郑丽辉张月忠来源:《时代汽车》2020年第20期摘要:本文以1/4车辆悬架为研究对象,根据悬架动力学理论,建立动力學微分方程。
并在Matlab/Simulink环境下搭建路面激励模型和1/4悬架系统动力学仿真模型,对衡量悬架舒适性的车身加速度、悬架动行程、车轮动载荷三方面评价指标进行仿真研究,为悬架设计提供技术参考。
关键词:1/4车辆悬架舒适性仿真研究Modeling and Simulation of 1/4 Vehicle Suspension Based on SimulinkZheng Lihui Zhang YuezhongAbstract:The article takes 1/4 vehicle suspension as the research object, and establishes dynamic differential equations based on suspension dynamics theory. In Matlab/Simulink environment, a road excitation model and a 1/4 suspension system dynamics simulation model are built to simulate the three evaluation indexes of body acceleration, suspension dynamic stroke, and wheel dynamic load to measure the comfort of suspension, so as to provide technical reference for suspension design.Key words:1/4 vehicle suspension, comfort, simulation research1 引言车辆悬架连接车身与车轮,传递两者之间的作用力和力矩,并通过弹性元件和阻尼元件的相互作用衰减不平路面引起的车辆振动,提高车辆平顺性与舒适性。
基于随机路面的空气悬架平顺性研究

统、 轮胎模型 、 车身模型相连接 , 并定义相关通讯器 , 完成整车装
6 6
2 中所 编 写 的 X . 2 ML文 件 。
— 究 : u芭 0 陈昆山等 : 于随机路 面的空 气悬架平顺性研g1一 {8 基
0 0
一 £ 一 弋 _ §萑
一 , * 占 第 5期 J
选择 1 I M 2 T 5 - 膜式空气弹簧, 在不同初始压力情况下试验, 测
得不同静载荷下空气弹簧的刚度特性曲线 , 如图 1 所示。 根据图 1 数 据在 X S Y .环境中编写空气弹簧刚度特陛的X ML P 5 0 ML文件。 扩展
标记语言 X 是—种简单的数据存储语言, ML 使用一系列简单的标 记
陈昆山 周 柔
( 江苏大 学 汽车 与交通工程 学院 , 镇江 2 2 1 ) 103
Rie c mf r smua in r s a c fars s en in b s d o a d m o d s r c d o o t i lt e e r h o i u p so a e n r n o r a u f e o a
I /
.
.
.
■
0
I
Feun v H ) roe c ( z
I - - I
_
图 1 向加速度均方根值计算过程 2垂
『?
Fe u ny Hz rqe c ( )
] 。
由 lW G l将 权 数 平 与 率 密 =f 。 ,加 函 的 方 功 谱 ∽∽
Ke r s Vi t a r t t p ; rs s e so Ri ec m f r y wo d : ru l o o y e Ai u p n i n; d o o t p
非平稳路面激励下整车动力学建模与仿真

黑龙 江交通科 技
HEI L ONGJ I ANG J I AOTONG KE J
No . 2, 2 0 1 4
( S u m N o . 2 4 0 )
非 平 稳路 面激 励 下整 车动 力学 建模 与 仿真
张衍成 , 陈学文 , 李 萍, 王 娜 ( 辽宁工业大学 汽车与交通 工程学院 )
立 的四轮非平 稳随机路面输 入不平度 轮廓如 图 1 所示。随 着时 间的增加 , 不仅路 面不平度 的幅值有所增加 , 而且 路面 的低频成分也提高 了。
式中: n 。 。 =O . 0 1 m 为路面 空间截 止频率 ; n 。=0 . 1 m 为标 准空 间频率 ; c ( ) 为路面不平度系数 ; 为行驶车速 ; ( ) 为白噪声 。根据路 面功 率谱密度 , 可将 路面等 级分为 8级,
收稿 日期 : 2 0 1 3—0 9—1 2
作者简介 : 张衍成( 1 9 8 7一 ) , 男, 山东肥城人 , 在读硕士研究生 , 研究方 向: 车辆系统动力学及控 制 ; 陈学文 ( 1 9 7 4一 ) , 男, 博士 , 副教授 , 主
要从事车辆 系统动力学及控制方面的研究。
・
摘
要: 为研究非平 稳路面激励下整车振动特性 , 以汽车行驶平顺 性为控制 目标 , 建 立非平稳 路面时域模 型
及整车振动模 型。运用滤波 白噪声的方法生成 随机路面轮廓 , 并对非平稳路 面下 汽车前后轮 激励进行 时域 特性分析 , 结果表明非平稳路面激励具有低频波动特性。最后 以车辆行驶动 力学 和操 纵动力学 的理论为基 础, 建立整车振动动力学方程 , 借助 Ma t l a b / S i m u l i n k 建立振动仿真模 型 , 得出在非平稳路面激励下 , 适当的调
基于carsim的整车半主动悬架pid控制研究
第32卷第6期机电#$%&'()Vol.32,No.6 2019年11月Development&Innovation of M achinery&E lectrical P roducts NOV.,2019文章编号:1002-6673(2019)06-078-03基于Carsim的整车半主动悬架PID控制研究裴倩倩,秦忠,陈伟(云南国土资源职业学院,云南昆明650000)摘要:本文建立了七自由度整车半主动悬架系统的动力学模型,并提出了评价悬架性能的三个指标:车身加速度、悬架动行程、轮胎动载荷。
为了满足悬架的三个性能指标,本文在悬架的垂直、侧倾和俯仰三个方向上设计了三个PID控制器,并分配到汽车的四个作动器上%为了验证PID控制器的有效性,本文以随机粗糙路面为例,在Carsim中建立整车模型和路面模型,在Simulink中设计PID控制器,两者进行联合仿真。
结果表明,相比于被动悬架,PID半主动悬架可以保证汽车在行驶过程中的平顺性和乘客乘坐的舒适性%关键词:半主动悬架'PID;Carsim中图分类号:$463.33文献标识码:A doi:10.3969/j.iss/.1002-6673.2019.06.024Research on PID Control of Vehicle Semi-active Suspension Based on CarsimPEI Qiaa-Qiaa,QIN Zhong,CHEN Wei(Yunnan Land Resources Vocational College,Kunming Yunnan650000, China)Abstract:This paper establishes the dynamic model of the seven—degree—of—freedom vehicle semi—active suspension system,and proposes three indicators for evaluating the performance of the suspension: body acceleration,suspension space limitation and dynamic tire deflection.In order to meet the three performance indicators of the suspension,three PID controllers are designed in the vertical,roll and pitch directions of the suspension and distributed to the four actuators of the car.In order to verify the effectiveness of the PID controller,this paper takes the random rough road as an example, establishes the whole vehicle model and the road surface model in Carsim,designs the PID controller in Simulink,and performs joint simulation.The results show that compared with the passive suspension,the PID semi—active suspension can ensure the smoothness of the car during driving and the comfort of passengers.Key words:semi—active suspension;PID;carsim0引言现如今,汽车已成为生活中不可或缺的交通工具’随着生活质量的提高和汽车的普及,人们对汽车的要求也越来越高,比如汽车要有良好的乘坐舒适性和更优的操作安全性,而汽车悬架系统是满足以上两个要求的关键部件’悬架系统是车辆组成中最重要的部件之一,它可以缓冲不平地面引起的冲击力,降低振动,使车辆平稳、安全的行驶叫通常,悬架分为:被悬架、主悬架、半主动悬架玖被悬架是目前应用最广泛的车辆悬架,它由性的弹簧和阻尼器组成,只能行驶在特定的,一生改变,悬架的性减弱。
交通流参数的泊松分布
研究目的和意义
1 2 3
揭示交通流特性
通过研究交通流参数的泊松分布,可以深入了解 交通流的随机性和波动性,为交通规划和管理提 供科学依据。
提高交通安全水平
交通事故往往具有随机性,通过研究事故发生的 泊松分布规律,可以制定针对性的安全措施,降 低事故风险。
优化交通运行效率
交通拥堵是城市交通的常见问题,通过研究交通 流参数的泊松分布,可以为缓解交通拥堵提供理 论支持和实践指导。
02
在交通流分析中,泊松分布可用 于模拟车辆到达的随机过程,其 中事件(车辆到达)以固定的平 均速率随机且独立地发生。
模型假设与参数设定
交通流是随机的且独立的
假设车辆的到达不受先前到达车辆的影响,即车辆到达是独立的随机事件。
恒定的平均到达率
在一段时间内,车辆的平均到达率保持恒定,用参数λ表示。这意味着在任意两 个相等的时间间隔内,车辆到达的次数服从泊松分布。
泊松分布参数估计方法
针对交通流参数的泊松分布特性,提出了有效的参数估计 方法,包括最大似然估计、矩估计等,为实际应用中的交 通流预测和规划提供了可靠依据。
交通流模型改进
基于泊松分布特性,对传统交通流模型进行了改进和优化, 提高了模型的预测精度和实用性,为交通规划和管理提供 了科学依据。
对未来研究方向的展望
通过分析历史交通流数据,可以揭示出交通流参数的时空变化规 律。这些规律可以为交通管理部门提供决策支持,例如合理调配 警力资源、优化交通信号灯配时方案等。
05 交通流参数泊松分布应用 案例
城市道路拥堵状况评估
交通流量统计
01
通过观测和统计某一路段或交叉口的车辆到达情况,利用泊松
分布描述车辆到达的随机性,进而分析交通拥堵状况。
轮胎模型
• 一、轮胎模型简介 • 轮胎建模的方法分为三种: • 1)经验—半经验模型 针对具体轮胎的某一具体特性。目 前广泛应用的有Magic Formula公式和吉林大学郭孔辉院 士利用指数函数建立的描述轮胎六分力特性的统一轮胎半 经验模型UniTire,其主要用于车辆的操纵动力学的研究。 • 2)物理模型 根据轮胎的力学特性,用物理结构去代替轮 胎结构,用物理结构变形看作是轮胎的变形。比较复杂的 物理模型有梁、弦模型。 • 特点是具有解析表达式,能探讨轮胎特性的形成机理。缺 点是精确度较经验—半经验模型差,且梁、弦模型的计算 较繁复。
• 以下的路面模型需要各自软件的安装环境和许可证 • 所有Adams软件中的.xml路面文件;所有的 Simpack™ 路面 模型 ;所有由TYDEX/STI给出的标准道路格式文件;IPG路 面( IPG汽车公司提供的);URM道路(利用简单的程序编 程的道路模型);用户自定义的模型 。 • FTire是高分辨率物理轮胎模型,需要每秒数百万次评价路 面,为了实现空间和时间分辨率,路面模型选择很重要。 RGR路面(规则的栅格路面)是一个高分辨率的路面模型, 它采用等距网格避免寻找三角单元的节点,可选带有弧形中 心线,是特别适合以满足需求的效率,准确性和灵活性的路 面模型。因此,除了简单的几何参数的障碍路面模型,RGR 路面是FTire的首选路面描述方法。
• FTire的优点 • 具有完全的非线性;频率可达120-150Hz甚至更高;对波 长降到轮胎接地尺寸一半的小障碍物,能够得出有效的结 果;具有高精度的轮胎稳态特性;当通过凹凸不平的路面 时,能提供很高的精度;计算时间为实时5-20倍;能识别 很多不同格式的路面文件。
模拟路测解决方案(3篇)
第1篇一、引言随着我国汽车产业的快速发展,道路测试成为了汽车研发、生产和检验的重要环节。
然而,由于实际道路测试存在诸多限制,如安全性、成本、时间等,因此模拟路测作为一种有效的替代方案,受到了越来越多的关注。
本文将针对模拟路测解决方案进行探讨,以期为我国汽车行业提供有益的参考。
二、模拟路测的背景与意义1. 背景随着新能源汽车、自动驾驶汽车等新兴领域的快速发展,汽车行业的研发周期越来越短,市场竞争日益激烈。
在实际道路测试过程中,由于安全、成本、时间等因素的限制,难以满足汽车研发和检验的需求。
因此,模拟路测作为一种高效的测试手段,在汽车行业得到了广泛应用。
2. 意义(1)提高测试效率:模拟路测可以在短时间内完成大量测试项目,有效缩短研发周期。
(2)降低测试成本:模拟路测可以减少实际道路测试中的交通、人力、物力等成本。
(3)提高测试安全性:模拟路测可以在封闭环境中进行,降低事故风险。
(4)满足法规要求:模拟路测可以满足相关法规对汽车性能和安全性测试的要求。
三、模拟路测解决方案1. 模拟环境搭建(1)仿真软件:选择适合的仿真软件,如MATLAB、Simulink等,进行系统建模和仿真。
(2)仿真硬件:搭建仿真平台,包括计算机、控制器、传感器、执行器等。
(3)仿真环境:根据实际道路情况,构建仿真环境,如道路模型、交通场景等。
2. 模拟路测流程(1)测试方案设计:根据测试需求,设计测试方案,包括测试项目、测试指标、测试方法等。
(2)仿真模型建立:根据测试方案,建立仿真模型,包括车辆模型、道路模型、环境模型等。
(3)仿真实验:在仿真平台上进行实验,验证仿真模型的准确性。
(4)测试数据分析:对测试数据进行处理和分析,评估汽车性能和安全性。
(5)测试结果反馈:根据测试结果,对测试方案进行调整和优化。
3. 模拟路测关键技术(1)多物理场耦合仿真:针对汽车系统中的力学、热学、电磁学等多物理场耦合问题,采用多物理场耦合仿真技术。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
□王思卓 邹浙湘 李明扬
【摘
要】 本文通过对路面不平度功率谱的分析 , 对空间频率功率谱密度和时间频率功率谱密度之间进行换算 。通过再现车辆 行驶中真实的路况, 建立随机路面的路谱模型 。
【关键词】 随机路面; 仿真模型; 路面激励 【作者单位】 王思卓、 邹浙湘、 李明扬, 北京理工大学珠海学院机械与车辆学院
图 1 路面纵断面曲线( 不平度函数 表1 路面不平度分级标准
n2 0 v。于是路面轮廓可由谱密度 2 πn0 槡 G q ( n0 ) v 的白噪声 t 通过一个积分器产生, 用式表达为: q( t) = k0 ∫ 0 ω ( t ) dt ( 7) — —系数, k0 = 2 πn0 槡 G q ( n0 ) v ; 式中 k0 — — —单位白噪声 ω( t ) — 实际上, 式( 7 ) 与实际仍有不符之处。 当时间频趋向于 零时, 路面功率谱将趋向无穷大, 但实际路面并非如此。 路 面模型建立是为了在仿真时利用其对悬架系统进行检验, 有 利于找出问题, 为整个系统及其控制策略的设计提供帮助 。 本文选择路面等级为 B 的路面功率谱。设定汽车速度为 v = 20m / s, 查表可知: G q ( n0 ) = 64 × 10 6 m2 / m - 1 、 n0 = m - 1 , 可 求 得 k0 = 0. 02248 。
·83·
( 三) 随机路面模型 Simulink 仿真。 当汽车在进行悬架 需要转换成在时域内的时间序列 。 将白噪 振动分析仿真时, 均可以得到随机路面不 声模块通过积分器或者成形滤波器, 即积分白噪声的方法。 平度时间轮廓。这里我们使用前者,
2 由式( 6 ) 可知, 当车速 v 给定时, 谱密度为一常数 4 π G q ( n0 )
一、 引言 车辆在行驶时, 道路的不平坦和各种惯性力及空气作用 影响车辆的乘坐舒适性和行驶安全 力将激发车辆的振动, 性。其中, 路面激励作为系统输入, 很大程度上影响了悬架 的动力学特性。路面激励可分为随机激励和离散激励, 前者 如 来自于路面持续的小的不平整; 后者来自于路面的突变, 凹坑和凸起等
[ J] . 现代护理, 2002 2. P. Michael Ho,John A. Spertus,Frederick A. Masoudi,et al. Impact of Medication Therapy Discontinuation on Mortality J] . Parch Intern Med, 2006 After Myocardial Infarction[ 3. L. Kristin Newby, Nancy M. Allen LaPointe, Anita Y. Chen, Judith M. et al. Long - Term Adherence to Evidence - Based Secondary Prevention Therapies in Coronary Artery Disease[ J] . Circulation, 2006 4. 赵冬, 刘群. 中国冠心病二级预防架桥工程进展 —初步调 J] . 中华医学信息导报, 2007 查结果分析报告[ 5. Anil K. Gehi,Sadia Ali,Beeya Na,et al. Self - reported Medication Adherence and Cardiovascular Events in Patients With Stable Coronary Heart Disease[ J] . Arch Intern Med, 2007 6. 肖娴, 杜世正. 冠心病病人二级预防用药低依从性及护理 J] , 2010 干预研究进展护理研究[
。离散激励可以用几何尺寸进行描述, 往往
用阶跃、 矩形脉冲代之。 但是接近于平稳的随机路面, 难以 用上述信号描述, 这些路面的特性需要用统计的特性来描 述。本文主要讨论的是平稳随机的不平路面 。 二、 随机路面输入模型 ( 一) 随机路面不平度功率谱 。路面纵断面曲线( 不平度 函数)
[2 ]
G q ( n0 ) — — —路面不平度系数( m2 / m - 1 ) , 在参考空间平 率下的路面功率谱密度值; W— — —频率指数, 表示双对数坐标上斜线的斜率, 决定 路面不平度的频率结构 。 低 、 高频段对应不同的频率指数, 通常路面情况下, 分级路面谱的频率指数 W = 2 。 表 1 规定 了 8 个级别下路面不平度系数 G q ( n0 ) 的上下限值和几何均 值。
是指路面相对基准平面的高度沿道路走向长度上的
变化 , 如图 1 所示。 由于路面的随机性, 很少有两个完全相同的路面不平度 ( 二) 全面观察冠心病患者生活方式的各个方面 。 国内 体重控制、 抑郁情绪等已进行了 外学者对冠心病患者戒烟 、 少量研究, 但对食盐摄入、 纤维素摄入、 优质蛋白摄入、 饮酒、 情绪控制的其他方面( 如焦虑、 整体心理健康状况) 等未进行 深入研究。根据现有资料, 难以形成对冠心病患者生活方式 依从性的全面认识, 因此, 应综合生活方式的各个方面进行 评估。 ( 三) 定量、 定性研究相结合。国内外学者从不同角度对 冠心病患者二级预防用药依从性的影响因素进行了定量调 但各研究者编制问卷条目的依据是什么? 目前缺乏定性 查, 研究提供佐证。各种自编问卷内容多样 、 维度不一, 也从侧 面提示冠心病患者依从性影响因素研究中定性研究的必要 。 【参考文献】 1. 刘丽娟, 程银萍. 496 例冠心病患者服药依从性调查分析
[1 ]
函数。测得路面不平度数据的工具主要有水准仪和专门的 路面计。路面的统计特性可以由其功率谱密度来表示: G q ( n ) = G q ( n0 )
( nn )
0
-W
( 1) 1 ( λ 为波长) , 表示一 λ
— —空间频率( m - 1 ) , n= 式中 n — 米中包含几个波长; n0 — — —参考空间频率, n0 ( m - 1 ) ;