自动控制原理简明教程第二章答案
《自动控制原理》(卢京潮,西北工业大学)第二章习题及答案
∴
G ( s) =
4 ⎤ ⎡ −1 k (t ) = L−1 [G ( s )] = L−1 ⎢ + = 4e − 2 t − e − t ⎥ s + 1 s + 2 ⎣ ⎦
- 16 -2-10 Nhomakorabea已知系统传递函数
C ( s) 2 &(0) = 0 , , 且初始条件为 c(0) = −1 ,c = 2 R ( s ) s + 3s + 2
(1) (3) 原式 =
−1 1 3 1 1 + − + + 3 2 2( s + 2) 4( s + 2) 8( s + 2) 24s 3( s + 3)
− t 2 − 2 t t − 2 t 3 − 2 t 1 −3t 1 ∴ x(t)= e + e − e + e + 4 4 8 3 24
1 s 1 1 s +1 1 1 1 2 − 2 = − ⋅ + ⋅ (4) 原式 = 2 2 s s + 2 s + 2 2 s 2 ( s + 1) + 1 2 ( s + 1) 2 + 1
化,试推导 id = f (ud ) 的线性化方程。 解 解得 将 i d = 10 −14 (e 将 i (0) = 2.19 × 10 A 代入 i d = 10 −14 (e
−3
ud
u d / 0.026
− 1)
ud 0 = 0.679V
u d / 0.026
− 1) 在( u d 0 , i0 )处展开为泰勒级数,
∴ X (s) = ∴ X ( s) =
e− s 1 e −3s 1 ( s ) − 2 (2 s + ) + 2 s 2 s 2
自动控制理论第二章习题答案
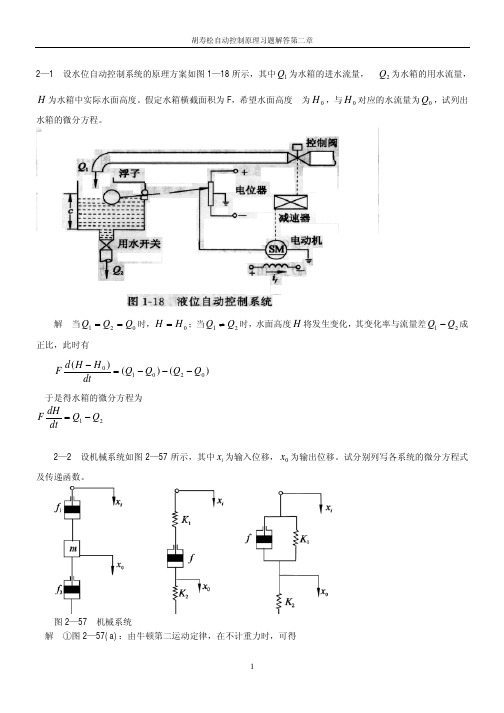
式中 K 为比例常数, P 为阀门前后的压差。若流量 Q 与压差 P 在其平衡点 (Q0 , P0 ) 附近作微小变化,试导出线性化
方程。 解:
设正常工作点为 A,这时 Q0 = K P0
在该点附近用泰勒级数展开近似为:
y
=
f
(
x0
)
+
df (x) dx
x0
(
x
−
x0
)
即 Q − Q0 = K1 (P − P0 )
其中 K1
= dQ dP P=P0
=
1K 2
1 P0
2-7 设弹簧特性由下式描述:
F = 12.65 y1.1
其中,是弹簧力;是变形位移。若弹簧在变形位移附近作微小变化,试推导的线性化方程。 解:
设正常工作点为 A,这时 F0
=
12.65
y1.1 0
在该点附近用泰勒级数展开近似为:
2-3 试证明图2-58(a)的电网络与(b)的机械系统有相同的数学模型。
2
胡寿松自动控制原理习题解答第二章
图 2-58 电网络与机械系统
1
解:(a):利用运算阻抗法得: Z1
=
R1
//
1 C1s
=
R1 C1s
R1
+
1 C1s
=
R1 = R1 R1C1s + 1 T1s + 1
Z2
=
R2
+
1 C2s
(C2
+
2C1 )
du0 dt
+ u0 R
=
C1C2 R
d 2ui dt 2
自动控制原理_王万良(课后答案2
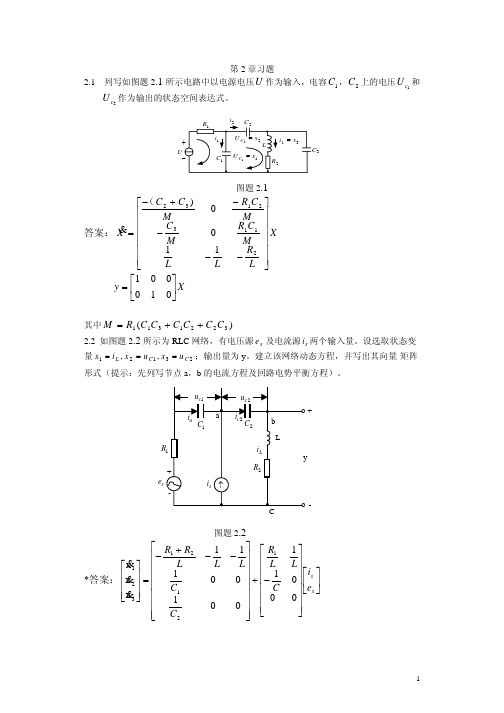
第2章习题2.1 列写如图题2.1所示电路中以电源电压U 作为输入,电容1C ,2C 上的电压1c U 和2c U 作为输出的状态空间表达式。
图题2.1答案:X L R LL M C R M C M C R M C C X ⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−−−−+−=211321321100)(& X y ⎥⎦⎤⎢⎣⎡=010001其中)(3221311C C C C C C R M ++=2.2 如图题2.2所示为RLC 网络,有电压源s e 及电流源s i 两个输入量。
设选取状态变量23121,,C C L u x u x i x ===;输出量为y 。
建立该网络动态方程,并写出其向量-矩阵形式(提示:先列写节点a ,b 的电流方程及回路电势平衡方程)。
图题2.2*答案:⎥⎦⎤⎢⎣⎡⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎣⎡−+⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡−−+−=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡s s e i C L L R C C L L L RR 0001100100111x x x 12121321&&&U 3+-se[]111−−−=R y ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡321x x x +[]⎥⎦⎤⎢⎣⎡s s e i R 11 2.3 列写图题2.3所示RLC 网络的微分方程。
其中,r u 为输入变量,c u 为输出变量图题2.3答案:r c cc u u dt du RC dtu d LC =++22 2.4 列写图题2.4所示RLC 网络的微分方程,其中r u 为输入变量,c u 为输出变量。
图题2.4答案:r c cc uu dt du R L dtu d LC =++22 2.5 图题2.5所示为一弹簧—质量—阻尼器系统,列写外力)(t F 与质量块位移)(t y 之间)(t图题2.5答案:)()()()(22t f t ky dt t dy f dtt y d m =++ 2.6 列写图题2.6所示电路的微分方程,并确定系统的传递函数,其中r u 为输入变量,cu 为输出变量。
自动控制原理及其应用_课后习题答案_第二章
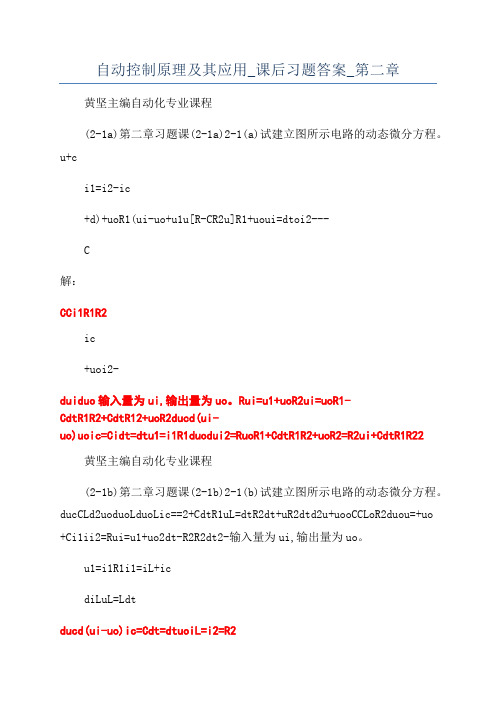
自动控制原理及其应用_课后习题答案_第二章黄坚主编自动化专业课程(2-1a)第二章习题课(2-1a)2-1(a)试建立图所示电路的动态微分方程。
u+ci1=i2-ic+d)+uoR1(ui-uo+u1u[R-CR2u]R1+uoui=dtoi2---C解:CCi1R1R2ic+uoi2-duiduo输入量为ui,输出量为uo。
Rui=u1+uoR2ui=uoR1-CdtR1R2+CdtR12+uoR2ducd(ui-uo)uoic=Cidt=dtu1=i1R1duodui2=RuoR1+CdtR1R2+uoR2=R2ui+CdtR1R22黄坚主编自动化专业课程(2-1b)第二章习题课(2-1b)2-1(b)试建立图所示电路的动态微分方程。
ducCLd2uoduoLduoLic==2+CdtR1uL=dtR2dt+uR2dtd2u+uooCCLoR2duou=+uo+Ci1ii2=Rui=u1+uo2dt-R2R2dt2-输入量为ui,输出量为uo。
u1=i1R1i1=iL+icdiLuL=Ldtducd(ui-uo)ic=Cdt=dtuoiL=i2=R2习题课一(2-2)求下列函数的拉氏变换。
(1)f(t)=in4t+co4tf(t)=in4t+co4tw:L解:∵L[inwt]=22w+L[cowt]=22w+ 4+L∴L[in4t+co4t]=2+162+16+4=2+16黄坚主编自动化专业课程(2)f(t)=t3+e4tf(t)=t3+e4t]=3!+:解:L[t3+1(3)f(t)=tneatf(t)=)=t13!1-4=4+-4:解:L[tneat]=n!(-a)n+1(4)f(t)=(t-1)2e2tf(t)=(t-1)2e2t]=e-(-2)2:解:L[(t-1)(-2)3黄坚主编自动化专业课程2-3-1函数的拉氏变换。
F()=(+1)(+3)F()=+1+1A解:A1=(+2)(+1)(+3)+1A2=(+3)(+1)(+3)1F()=+3-+2F()=2=-3=-1=-2=2f(t)=2e-3t-e-2tf(t)=2e黄坚主编自动化专业课程2-3-2函数的拉氏变换。
自动控制原理C作业(第二章)答案
4 3
0.1
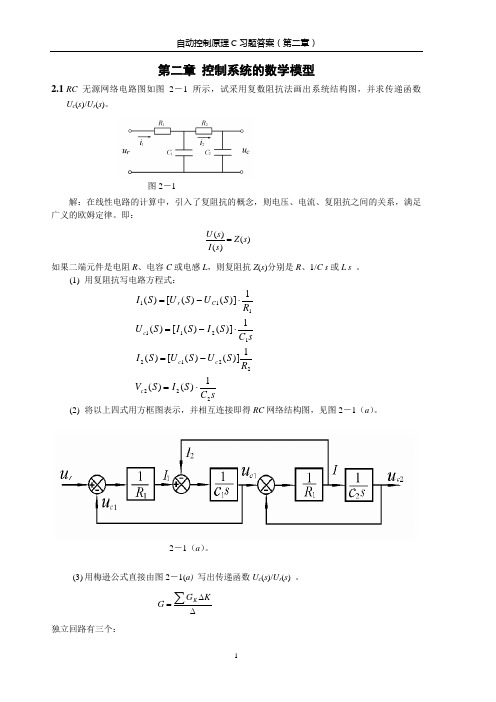
图 3-1 二阶控制系统的单位阶跃响应
解 在单位阶跃作用下响应的稳态值为 3,故此系统的增益不是 1,而是 3。系统模型为
(s)
s2
3
2 n
2n s
2 n
然后由响应的 p % 、 t p 及相应公式,即可换算出 、 n 。
p%
c(t p ) c() c()
4
3
3
33%
t p 0.1(s)
P1 G1G2
1 1
P2 G2G4
2 1
因此,传递函数为
C(s) P11 P2 2
R(s)
G2G1 G4G2 1 G1G2G3
3
自动控制原理 C 习题答案(第二章)
2.4 用梅森公式求系统传递函数。
R(S)
-
_
+ G1(s)
- _
G2(s)
+ C(S)
+
图 2-4 解: 单独回路 5 个,即
L1
1 R
1 C1S
1 R1C1S
11
1
L2
R2
C2S
R2C2 S
L3
1 C1S
1 R2
1 R2C1S
回路相互不接触的情况只有 L1 和 L2 两个回路。则
L12
L1L2
1 R1C1R2C2S 2
由上式可写出特征式为:
1
( L1
L2
L3 )
L1 L2
1
1 R1C1S
1 R2C2 S
1 R2C1S
1 R1C1R2C2S 2
益 K1 和速度反馈系数 Kt 。同时,确定在此 K1 和 Kt 数值下系统的延迟时间、上升时间和调节时间。
自动控制原理 胡寿松 第二版 课后答案 第二章_参考答案

第二章控制系统的数学模型习题及参考答案
自动控制原理胡寿松第二版课后答案
2-2 由牛顿第二运动定律,在不计重力时,可得
整理得
将上式拉氏变换,并注意到运动由静止开始,即初始条件全部为零,可得
于是传递函数为
②其上半部弹簧与阻尼器之间,取辅助点A,并设A点位移为x,方向朝下;而在其下半部工。
引出点处取为辅助点B。
则由弹簧力与阻尼力平衡的原则,从A和B两点可以分别列出如下原始方程:
消去中间变量x,可得系统微分方程
对上式取拉氏变换,并计及初始条件为零,得系统传递函数为
③以引出点作为辅助点,根据力的平衡原则,可列出如下原始方程:
移项整理得系统微分方程
对上式进行拉氏变换,并注意到运动由静止开始,即
则系统传递函数为
2-3
(b)以k1和f1之间取辅助点A,并设A点位移为x,方向朝下;根据力的平衡原则,可列出如下原始方程:
所以
2-6解:
2-7 解:
2-8 解:
2-9解:
2-10解:
系统的结构图如下:
系统的传递函数为:
2-11 解:(a)
(b)
(c)
(d)
(e)
(f)
2-12 解:。
自动控制原理习题2(含答案)

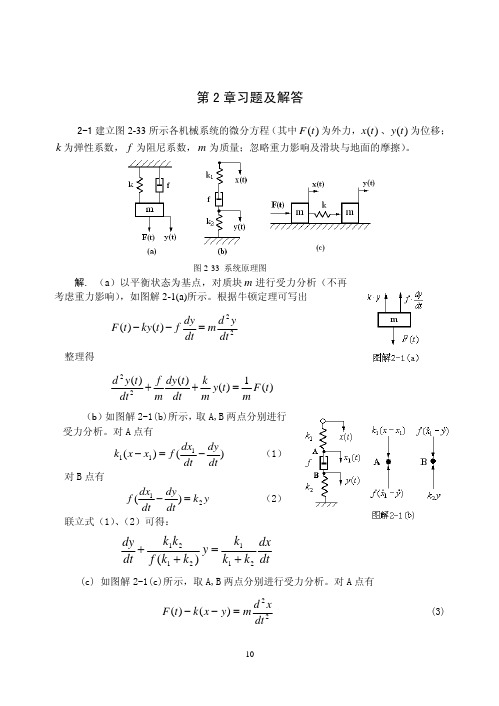
第二章习题及答案2-1试建立题2-1图所示各系统的微分方程[其中外力)(t F ,位移)(tx 和电压)(t u r为输入量;位移)(t y 和电压)(t u c为输出量;k (弹性系数),f (阻尼系数),R (电阻),C (电容)和m (质量)均为常数]。
解(a )以平衡状态为基点,对质块m 进行受力分析(不再考虑重力影响),如图解2-1(a)所示。
根据牛顿定理可写出22)()(dt yd m dt dy f t ky t F =--整理得)(1)()()(22t F m t y m k dt t dy m f dtt y d =++—(b )如图解2-1(b)所示,取A,B 两点分别进行受力分析。
对A 点有)()(111dtdydtdxf x x k -=-(1)对B 点有y k dtdydt dx f 21)(=-(2)联立式(1)、(2)可得:dtdx k k k y k k f k k dt dy2112121)(+=++(c) 应用复数阻抗概念可写出)()(11)(11s U s I csR cs Rs U c r ++=(3)`2)()(Rs Uc s I =(4)联立式(3)、(4),可解得:),可解得: Cs R R R R Cs R R s U s U r c 212112)1()()(+++= 微分方程为: r r c c u CR dt du u R CR R R dt du 121211+=++ (d) 由图解2-1(d )可写出)可写出[]Cs s I s I s I R s U c R R r 1)()()()(++= (5))()(1)(s RI s RI Css I c R c -= (6)[]Css I s I R s I s U c R c c 1)()()()(++= (7)联立式(5)、(6)、(7),消去中间变量)(s I C 和)(s I R ,可得:,可得:1312)()(222222++++=RCs s C R RCs s C R s U s U r c |微分方程为微分方程为 rr r c c c u RC dt du CR dt du u R C dt du CR dt du 222222221213++=++2-2 试证明题2-2图中所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
自控原理第二章习题答案

自控原理第二章习题答案自控原理第二章习题答案自控原理是一门研究控制系统的学科,它关注的是如何设计和优化控制系统,以实现系统的稳定性和性能。
在学习自控原理的过程中,习题是一个非常重要的组成部分,通过解答习题可以帮助我们更好地理解和掌握自控原理的知识。
在本文中,我将为大家提供自控原理第二章习题的答案,希望对大家的学习有所帮助。
1. 什么是反馈控制系统?它有哪些特点?答:反馈控制系统是一种通过测量输出信号,并将其与期望输出信号进行比较,然后根据比较结果对系统进行调整的控制系统。
它的特点包括:- 反馈环节:反馈控制系统中包含了一个反馈环节,通过测量输出信号,将其反馈给系统进行调整,以实现期望的输出。
- 自动调节:反馈控制系统能够根据反馈信号自动地对系统进行调节,无需人工干预。
- 稳定性:反馈控制系统能够提高系统的稳定性,使系统能够快速地恢复到期望状态。
- 抗干扰性能:反馈控制系统能够减小外部干扰对系统的影响,提高系统的抗干扰能力。
2. 什么是比例控制器?它的传递函数是怎样的?答:比例控制器是一种最简单的控制器,它根据误差的大小与比例增益之间的关系来调节系统的输出。
比例控制器的传递函数可以表示为:Gc(s) = Kp其中,Gc(s)为比例控制器的传递函数,Kp为比例增益。
3. 什么是积分控制器?它的传递函数是怎样的?答:积分控制器是一种根据误差的累积值来调节系统的输出的控制器。
积分控制器的传递函数可以表示为:Gc(s) = Ki/s其中,Gc(s)为积分控制器的传递函数,Ki为积分增益,s为复变量。
4. 什么是微分控制器?它的传递函数是怎样的?答:微分控制器是一种根据误差的变化率来调节系统的输出的控制器。
微分控制器的传递函数可以表示为:Gc(s) = Kd*s其中,Gc(s)为微分控制器的传递函数,Kd为微分增益,s为复变量。
5. 什么是比例积分控制器?它的传递函数是怎样的?答:比例积分控制器是一种同时具有比例和积分控制功能的控制器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第二章 控制系统的数学模型习题及答案 2-1 试建立下图所示各系统的微分方程。其中电压)(tur和位移)(tx为输入量;电压)(tuc和位移)(ty为输出量;R(电阻),C(电容),k(弹性系数),和f(阻尼系数),均为常数。
解: (a)应用复数阻抗概念可写出
)()(11)(11sUsIcsRcsRsUcr (1)
2)()(RsUcsI (2)
联立式(1)、(2),可解得: CsRRRRCsRRsUsUrc212112)1()()( 微分方程为: rrccuCRdtduuRCRRRdtdu121211 (b)如图解2-1(b)所示,取A,B两点分别进行受力分析。对A点有 )()(111dtdydtdxfxxk (1)
对B点有 ykdtdydtdxf21)( (2)
联立式(1)、(2)可得:
dtdxkkkykkfkkdtdy2112121)( 2-2 试证明下图所示的力学系统(a)和电路系统(b)是相似系统(即有相同形式的数学模型)。
解: (a) 取A、B两点分别进行受力分析, 如图解所示。对A点有 )()()(1122yyfyxfyxk (1)
对B点有
1111)(ykyyf (2)
对式(1)、(2)分别取拉氏变换,消去中间变量1y,整理后得
)()(sXsY = 21212121221212212121()1()1ffffsskkkkfffffsskkkkk
(b) 由图可写出 sCRsUc221)( = sCRsCRsCRsUr111112111)(
整理得 )()(sUsUrc = 1)(1)(21221122121221122121sCRCRCRsCCRRsCRCRsCCRR
比较两系统的传递函数,如果设112211221,1,,,RkRkCfCf则两系统的传递函数相同,所以两系统是相似的。 2-3 求下图所示各有源网络的传递函数)()(sUsUrc。 解: (a) 根据运算放大器 “虚地”概念,可写出12)()(RRsUsUrc (b) sCR)sCR1)(sCR1(sC1RsC1RsC1R)s(U)s(U212211111122rc
(c) )1(11)()(212122CsRRRRCsRCsRsUsUrc 2-4 某位置随动系统原理框图如下图所示,已知电位器最大工作角度 mQ=3300,功率放大器放大系数为3k。
(1) 画出系统的结构图; (2) 求系统的闭环传递函数)()(sQsQrc。 解: (1) 电位器的传递函数 11180180330300000mQ
EK
根据运算放大器的特性,可分别写出两级放大器的放大系数为 310101030331K, 210101020332K (2) 可画出系统结构如图如下:
(3) )1sT(sKKKKK1sTKKK1)1sT(sKKKKK)s(Q)s(Qmm3210mtm3mm3210rc 1sKKKKKKKK1sKKKKKT1m3210tm32m3210m
2-5 已知在零初始条件下,系统的单位阶跃响应为 tteetc221)(,试求系统的单位脉冲响应和传递函数。 解
t2te4edt)t(dc)t(k
)2s)(1s(23s1s12s4)]t(k[L)s(
1/k2 2-6 系统传递函数2s3s2)s(R)s(C2,试求初始条件分别为0)0(c)0(c和1)0(c、0)0(c时系统在输入)t(1)t(r作用下的输出)t(c。
解: 2tte2e1)t(c0)0(c)0(c时,
得时,由)t(2r)t(2c)t(c3)t(c0)0(c,1)0(c )s(2R)s(2C)0(3c)s(3sC)0(c)0(sc)s(Cs2
代入初始条件得:2s21s4s1)2s)(1s(s3ss2)s(C2 2tt2e4e1)t(c
2-7 飞机俯仰角控制系统结构图如图所示,试求闭环传递函数)s(Q)s(Qrc。
解: 经结构图等效变换可得闭环系统的传递函数 68.0s)K42.018.1(s)K7.09.0(s)6.0s(7.0)s(Q)s(Q23rc
2-8 已知系统方程组如下,试绘制系统结构图,并求闭环传递函数)s(R)s(C。
)()()()()]()()([)()]()()()[()()()]()()[()()()(3435233612287111sXsGsCsGsGsCsXsXsXsGsXsGsXsCsGsGsGsRsGsX 解: 系统结构图如下: 利用结构图等效化简或梅逊增益公式可求出系统的闭环传递函数为 84321743215436324321GGGGGGGGGGGGGGGG1GGGG)s(R)s(C
2-9 试用结构图等效化简求图示各系统的传递函数)s(R)s(C。
解: (a)
所以: 43213243214321GGGGGGGGGG1GGGG)s(R)s(C (b) 所以: HG1GG)s(R)s(C221
(c)
所以: 3213221321GGGGGGG1GGG)s(R)s(C 2-10 试用梅逊增益公式求下图中各系统的闭环传递函数。
解: (a)图中有1条前向通路,4个回路 1GGGGP143211, )LLLL(1HGGLHGGGGLHGGGLHGGL43212434443213332121321,,,, 243443213321132432111
HGGHGGGGHGGGHGG1GGGGP)s(R)s(C
(b)图中有2条前向通路,3个回路,有1对互不接触回路 ,,,,111243213211HG1L1GGP1GGGP
,,,3213213332111HHHGGGLHGLHGL ,21321LL)LLL(1
3311321321331111433212211
HGHGHHHGGGHGHG1)HG1(GGGGGPP)s(R)s(C
(c)图中有4条前向通路,5个回路 ,,,,1242321211GGPGPGGPGP
,,,,,2151242321211GGLGGLGLGGLGL ,,)LLLL(1143214321
44332211PPPP)s(R)s(C
2121212121122211122211GG3GG1GGGG2GGGGGGGG1GGGGGG
(d)图中有2条前向通路,3个回路,有1对互不接触回路 ,,,,1234213211L1GGP1GGGP
,,,3232321211HGLHGLHGGL ,21321LL)LLL(1 213213223121121343212211
HHGGGHGHGHGG1)HGG1(GGGGGPP)s(R)s(C
2-11 已知系统的结构图如下,图中)(sR为输入信号,)(sN为干扰信号,试求总输出C(s)。
解:(a)令0)s(N,求 )s(R)s(C。图中有2条前向通路,3个回路,有1对互不接触回路。 ,,,,HG1L1GGP1GGP2123121211
,,,31321221GGLGGLHGL ,31321LL)LLL(1
则有 HGGGGGGGHG1)HG1(GGGGPP)s(R)s(C32131212231212211 令0)s(R,求 )s(N)s(C。有3条前向通路,回路不变。 ,,,,1GGGPL11P22142111 ,,133143L1GGGP ,31321LL)LLL(1
HGGGGGGGHG1)HG1(GGGGGGHG1PPP)s(N)s(C3213121223142142332211