基于WiFi的微型四旋翼飞行器设计
一种微型四轴飞行器设计①
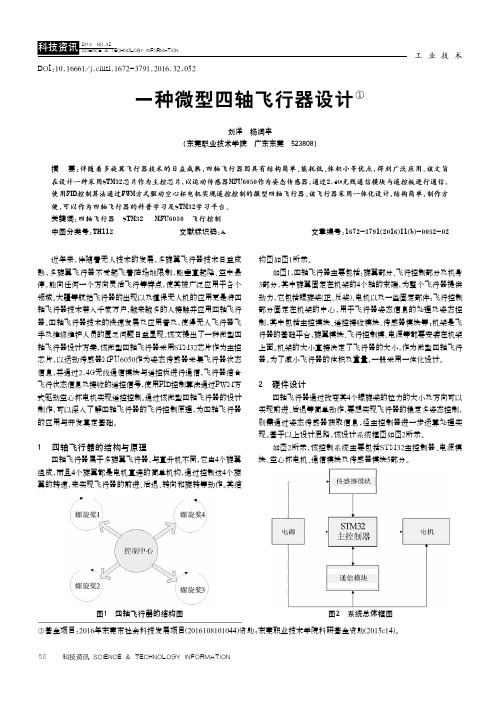
图3 最小系统电路
2.1 主控电路 主控制器,作为四轴飞行控制系统的核心,主要功能是接收遥
控控制信号,将当前飞行姿态信息与目标姿态信息进行比较,通 过控制算法,计算出各电机PWM脉冲占空比值输出至电机,实现 飞行控制。考虑到STM32学习的方便,该设计选用STM32F103作 为主控芯片,最小系统电路如图3所示[3]。 2.2 传感器模块
图1 四轴飞行器的结构图
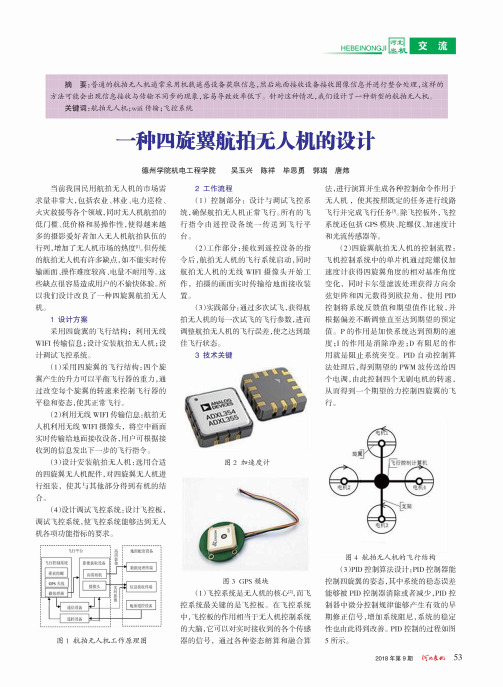
图2 系统总体框图
①基金项目:2016年东莞市社会科技发展项目(2016108101044)资助;东莞职业技术学院科研基金资助(2015c14)。
52 科技资讯 SCIENCE & TECHNOLOGY INFORMATION
工业技术
科技资讯 2016 NO.32
SCIENCE & TECHNOLOGY INFORMATION
在设计一种采用STM32芯片作为主控芯片,以运动传感器MPU6050作为姿态传感器,通过2.4G无线通信模块与遥控板进行通信,
使用PID控制算法通过PWM方式驱动空心杯电机实现遥控控制的微型四轴飞行器。该飞行器采用一体化设计,结构简单,制作方
便,可以作为四轴飞行器的科普学习及STM32学习平台。
关键词:四轴飞行器 STM32 MPU6050 飞行控制
科技资讯 2016 NO.32 SCIENCE & TECHNOLOGY INFORMATION
DOI:10.16661/ki.1672-3791.2016.32.052
一种微型四轴飞行器设计①
工业技术
刘洋 杨润丰 (东莞职业技术学院 广东东莞 523808)
摘 要:伴随着多旋翼飞行器技术的日益成熟,四轴飞行器因具有结构简单、能耗低、体积小等优点,得到广泛应用。该文旨
小型四旋翼低空无人飞行器综合设计

小型四旋翼低空无人飞行器综合设计小型四旋翼低空无人飞行器综合设计一、引言近年来,随着科技的不断发展,无人飞行器成为了航空领域的热门研究课题。
小型四旋翼低空无人飞行器因其灵活性和机动性而备受关注。
本文旨在综合设计一种小型四旋翼低空无人飞行器,并对其关键设计问题进行探讨。
二、设计目标本次设计的小型四旋翼低空无人飞行器的设计目标如下:1. 具备良好的悬停稳定性,能够在低空进行稳定的悬停飞行;2. 具备较高的操控能力,能够完成复杂的机动动作;3. 具备一定的荷载能力,能够搭载各种传感器或设备,以实现不同应用场景的需求;4. 具备良好的安全性,能够应对紧急情况并自动返航。
三、机构设计1. 旋翼设计:选择合适的旋翼叶片尺寸、扭矩和旋翼转速,以实现所需的升力和推力,并保证飞行器的稳定性和机动性。
2. 机身设计:考虑到飞行器的结构强度和重量的平衡,使用轻质且强度高的材料,以实现飞行器的结构刚度和稳定性。
3. 电机设计:根据所需的推力和转速要求,选择合适的电机,并配置相应的驱动和控制系统。
四、控制系统设计1. 姿态控制:采用惯性测量单元(IMU)获取飞行器的姿态信息,通过PID控制算法实现稳定的悬停飞行和精确的操控。
2. 导航系统:利用全球定位系统(GPS)和陀螺仪传感器获取飞行器的位置和速度信息,实现精确的导航和定位。
3. 通信系统:设计一套可靠的数据传输系统,将飞行器采集到的数据传输到地面控制器,并接收指令以实现远程操控。
4. 紧急情况处理:设计一套自主判断机制,当飞行器遇到故障或紧急情况时,能够自动触发返航程序,确保飞行器的安全。
五、能源系统设计1. 电源选择:根据需求选择合适的电池类型和容量,以提供飞行器所需的电力。
2. 能效优化:通过优化电机和电子元件的功耗,减少能源的消耗,延长飞行器的续航时间。
3. 充电系统:设计一套快速充电系统,以提高电池的充电效率和充电速度,减少充电时间。
六、飞行器性能测试设计完成后,对飞行器进行性能测试,验证其实际飞行性能和稳定性。
一种四旋翼航拍无人机的设计
德州学院机电工程学院吴玉兴陈祥毕思勇郭瑞唐炜当前我国民用航拍无人机的市场需 求量非常大,包括农业、林业、电力巡检、 火灾救援等各个领域,同时无人机航拍的 低门槛、低价格和易操作性,使得越来越 多的摄影爱好者加人无人机航拍队伍的 行列,增加了无人机市场的热度[1]。
但传统 的航拍无人机有许多缺点,如不能实时传 输画面、操作难度较高、电量不耐用等。
这 些缺点很容易造成用户的不愉快体验。
所 以我们设计改良了一种四旋翼航拍无人 机。
1设计方案采用四旋翼的飞行结构;利用无线 W IF I 传输信息;设计安装航拍无人机;设计调试飞控系统。
(1)采用四旋翼的飞行结构:四个旋翼产生的升力可以平衡飞行器的重力,通 过改变每个旋翼的转速来控制飞行器的 平稳和姿态,使其正常飞行。
(2)利用无线W IF I 传输信息:航拍无人机利用无线W IF I 摄像头,将空中画面 实时传输给地面接收设备,用户可根据接 收到的信息发出下一步的飞行指令。
(3)设计安装航拍无人机:选用合适的四旋翼无人机配件,对四旋翼无人机进 行组装,使其与其他部分得到有机的结 合。
(4)设计调试飞控系统:设计飞控板,调试飞控系统,使飞控系统能够达到无人图1航拍无人机工作原理图2工作流程(1)控制部分:设计与调试飞控系 统,确保航拍无人机正常飞行。
所有的飞 行指令由遥控设备统一传送到飞行平 台。
(2)工作部分:接收到遥控设备的指 令后,航拍无人机的飞行系统启动,同时 航拍无人机的无线W IF I 摄像头开始工 作,拍摄的画面实时传输给地面接收装 置。
(3)实践部分:通过多次试飞,获得航 拍无人机的每一次试飞的飞行参数,进而 调整航拍无人机的飞行误差,使之达到最 佳飞行状态。
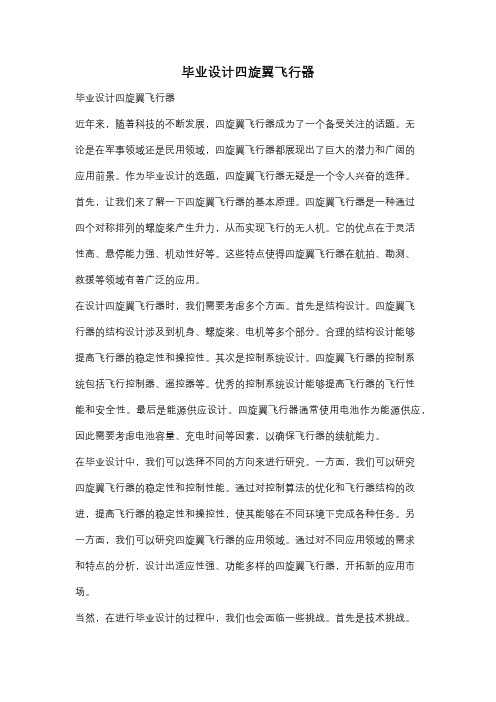
3技术关键图3 GPS 模块(1)飞控系统是无人机的核心[2],而飞控系统最关键的是飞控板。
在飞控系统 中,飞控板的作用相当于无人机控制系统 的大脑,它可以对实时接收到的各个传感器的信号,通过各种姿态解算和融合算法,进行演算并生成各种控制命令作用于 无人机,使其按照既定的任务进行线路飞行并完成飞行任务[3]。
毕业设计四旋翼飞行器
毕业设计四旋翼飞行器毕业设计四旋翼飞行器近年来,随着科技的不断发展,四旋翼飞行器成为了一个备受关注的话题。
无论是在军事领域还是民用领域,四旋翼飞行器都展现出了巨大的潜力和广阔的应用前景。
作为毕业设计的选题,四旋翼飞行器无疑是一个令人兴奋的选择。
首先,让我们来了解一下四旋翼飞行器的基本原理。
四旋翼飞行器是一种通过四个对称排列的螺旋桨产生升力,从而实现飞行的无人机。
它的优点在于灵活性高、悬停能力强、机动性好等。
这些特点使得四旋翼飞行器在航拍、勘测、救援等领域有着广泛的应用。
在设计四旋翼飞行器时,我们需要考虑多个方面。
首先是结构设计。
四旋翼飞行器的结构设计涉及到机身、螺旋桨、电机等多个部分。
合理的结构设计能够提高飞行器的稳定性和操控性。
其次是控制系统设计。
四旋翼飞行器的控制系统包括飞行控制器、遥控器等。
优秀的控制系统设计能够提高飞行器的飞行性能和安全性。
最后是能源供应设计。
四旋翼飞行器通常使用电池作为能源供应,因此需要考虑电池容量、充电时间等因素,以确保飞行器的续航能力。
在毕业设计中,我们可以选择不同的方向来进行研究。
一方面,我们可以研究四旋翼飞行器的稳定性和控制性能。
通过对控制算法的优化和飞行器结构的改进,提高飞行器的稳定性和操控性,使其能够在不同环境下完成各种任务。
另一方面,我们可以研究四旋翼飞行器的应用领域。
通过对不同应用领域的需求和特点的分析,设计出适应性强、功能多样的四旋翼飞行器,开拓新的应用市场。
当然,在进行毕业设计的过程中,我们也会面临一些挑战。
首先是技术挑战。
四旋翼飞行器涉及到多个学科的知识,如机械设计、电子技术、控制理论等。
我们需要充分利用所学知识,结合实践经验,解决技术上的问题。
其次是资源挑战。
进行四旋翼飞行器的设计和制作需要一定的资金和设备支持。
我们需要合理安排资源,确保毕业设计的顺利进行。
然而,面对挑战,我们更应该看到四旋翼飞行器的巨大潜力。
四旋翼飞行器不仅可以应用于军事、航拍等领域,还可以用于环境监测、物流配送等领域。
基于物联网的微型四旋翼飞行器的设计
基于物联网的微型四旋翼飞行器的设计作者:符长友蔡洪斌刘昊李行来源:《现代电子技术》2016年第13期摘要:针对微型四旋翼飞行器在小型无人机领域中独具的优点,提出并采用多种传感器、蓝牙无线通信、嵌入式微控制器等物联网技术,设计出一款基于物联网的微型四旋翼飞行器。
详细阐述了其系统架构、硬件设计以及四元数算法、PID控制算法等。
实践表明,基于物联网的微型四旋翼飞行器具有易于控制、飞行姿态稳定、转向灵活等优点。
关键词:微型四旋翼飞行器;物联网;蓝牙;四元数; PID中图分类号: TN967.6⁃34; TP273 文献标识码: A 文章编号: 1004⁃373X(2016)13⁃0108⁃04Abstract: Since the micro quad⁃rotor aircraft (QRA) has the unique advantage in the field of small unmanned aerial vehicle, a micro QRA based on Internet of Things (IOT) was designed by adopting the IOT techniques (such as sensors, Bluetooth wireless communication, embedded microcontroller, etc). The system architecture, hardware design, quaternion algorithm and PID control algorithm of the micro quad⁃rotor aircraft are described in detail. The practice results show that the ORA based on IOT has the advantages of easy control, stable flight attitude and flexible steering.Keywords: micro quad⁃rotor aircraft; Internet of Things; Bluetooth; quaternion; PID0 引言四旋翼飞行器易于实现垂直升降和自由悬停,其机动性远远优于固定翼机型无人飞行器。
四旋翼飞行器遥控发射接收系统设计方案
四旋翼飞行器遥控发射接收系统设计方案(一)课题研究的目的和意义随着微电子、微导航、微机电技术的广泛运用,无人机技术很快就在全世界范围内掀起了研究热潮,并得到了快速且长足的发展。
相对于其他无人机而言,四旋翼飞行器的结构较为简单,成本也相对较低,方便维修和护理。
除此之外,四旋翼飞行器还具有体积小、重量轻、控制灵活方便、可垂直起降、悬停等特点,不论是在军事领域或是民用领域都得到了非常广泛的运用。
(二)国内外发展及研究现状1.国内四旋翼飞行器的研究目前,我国的一些高校和科研机构在四旋翼飞行器的研究上也取得了长足的发展。
比如国防科技大学,哈尔滨工业大学和南京航空航天大学等。
国防科技大学早就在2004年开始研究微小型飞行器的相关技术,是我国最早一批开展对四旋翼飞行器研究的高校之一,他们使用了自抗扰控制器(ADRC)算法以及反步法这两种方法来对四旋翼飞行器的控制系统进行设计。
在接下来的几年里,南京航空航天大学、南京理工大学等等高校也进行了对四旋翼飞行器的理论分析和计算机仿真,并都制作了属于自己的四旋翼飞行器。
同时,四旋翼飞行器在商业上的应用也越来越广泛,在2013年9月3日,顺丰就在广东东莞松山湖区域进行了无人机送货内测。
顺丰自主研发了该无人机的内置导航系统,该飞行器飞行高度约为100米,落点误差基本上能够控制在方圆两米以内,同时可以对路线和目的地来进行预先设定。
如果测试可行,就可以大量减少人力成本。
除此以外,越来越多的四旋翼飞行器以一种娱乐设备的形式出现在大众的视线里。
通常这种四旋翼飞行器都携带着摄像头,用户可以通过手持设备来对飞行器进行控制,以此来给用户带来乐趣。
2. 国外四旋翼飞行器的研究国外四旋翼飞行器的发展非常迅速,因为他们在这一领域已经拥有了非常悠久的历史,同时还有着深厚底蕴的研发团队。
四旋翼飞行器在多旋翼无人飞行器中是较为常见的一种类型,其对硬件平台的要求较高,相应的难度也较大。
国外有很多高校和科研机构都做出了一定的成果,有进行室外研究和室内研究的,其中进行室外研究的有美国斯坦福大学,日本千叶大学以及美国奥克兰大学和法国贡比涅技术大学等。
微型四旋翼控制系统设计
微型四旋翼控制系统设计0 前言无人飞行器(UAV)自主飞行技术多年来一直是航空领域研究的热点,并且在实际应用中存在大量的需求,例如:侦察与营救任务,科学数据收集,地质、林业勘探,农业病虫害防治,以及视频监控,影视制作等。
通过无人飞行器来完成上述任务可以大大降低成本和提高人员安全保障。
无人飞行器的主要优点包括:系统制造成本低,在执行任务时人员伤害小,具有优良的操控性和灵活性等。
而旋翼式飞行器与固定翼飞行器相比,其优势还包括:飞行器起飞和降落所需空间少,在障碍物密集环境下的可控性强,以及飞行器姿态保持能力高。
由国际无人运输系统协会(International Association for Unmanned Vehicle Systems)组织的一年一度的国际空中机器人竞赛(International Aerial Robotics Competition),为自主旋翼式飞行器的应用潜力研究提供了一个很好的展示平台。
该竞赛吸引了来自全世界不同国家研究团队的参与,来完成预先设定的自主飞行任务。
在无人飞行器自主飞行的众多技术当中,飞行器自主飞行控制算法的设计一直是控制领域众多研究者最关心的问题之一。
经典的控制策略在飞行器系统的某个特定作用点上往往首先将系统模型线性化,然后在此基础上运用经典控制理论对系统进行分析和控制,控制精度和控制能力偏弱。
相比之下,运用现代非线性控制理论设计的控制算法,其性能明显优于经典控制算法。
小型四旋翼飞行器与其它飞行器相比,其优势在于其机械结构较为简单,并且只需通过改变四个马达的转速即可实现控制,且飞行机动能力更加灵活。
另一方面,小型四旋翼飞行器具有较高的操控性能,并具有在小区域范围内起飞,盘旋,飞行,着陆的能力。
飞行器可以飞至离目标更近的区域,而不像传统直升机由于其巨大的单旋翼而不能近距离靠近目标。
同时,小型四旋翼飞行器研究也为自动控制,先进传感技术以及计算机科学等诸多领域的融合研究提供了一个平台。
四旋翼飞行器设计方案
四旋翼飞行器设计方案郭萧;祝玲;郭青;叶丽荣【摘要】Constitute a quadrotor has now for all known, the use of four rotor is also widely used, this paper explain the key to the specific design of the four rotor aircraft. The design used to main control chip Cotex-M4 K60, ZigBee wireless communication module, angle sensor, motor drive module and power management module, no brush motor etc., the specific implementation process as the main control chip through the complementary algorithm, Kalman filter algorithm realize the angle calculation and the PID or fuzzy control algorithm in the calculation of the motor output control, and real-time access to the ground station to make, appropriate action.%四旋翼飞行器如今已为众人所熟知,四旋翼的应用也比较广泛,本文重点讲解一下四旋翼飞行器的具体设计方案,本设计使用到主控芯片Cotex-M4 K60,无线通讯模块ZigBee,角度传感器,电机驱动模块,以及电源管理模块,无刷电机等组成,具体实现过程为主控芯片通过互补算法,卡尔曼滤波算法等实现角度计算和通过PID、模糊算法等控制计算电机控制输出,同时实时获取地面站指令,完成相应动作.【期刊名称】《电子世界》【年(卷),期】2015(000)015【总页数】2页(P184-185)【关键词】四旋翼飞行器;无线通讯;互补算法;PID【作者】郭萧;祝玲;郭青;叶丽荣【作者单位】北方民族大学;北方民族大学;北方民族大学;北方民族大学【正文语种】中文随着四旋翼飞行器的迅速发展,四旋翼飞行器在日常生活中的使用越来越频繁,抗险救灾,农药喷洒,岗位执勤等方面愈发凸显四旋翼飞行器的使用价值。
基于STM32控制的微型四轴飞行器
西华大学610039摘要:在对我很感兴趣的项目微型四轴飞行器进行了功能描述的基础上展开了对系统深入研究的方案设计。
该系统(装置)主要由飞控,遥控,蓝牙或WIFI模块,通信模块等组成。
飞控是由stm32f103作为主控,采用MPU6050作为惯性测量单元。
遥控是由arduino作为主控。
通信运用2.4G无线模块。
在AD环境中完成对飞控的的设计。
在keil 5中完成软件的设计。
然后,通过proteus软件完成飞控的模块的仿真与调试。
最后,分析了项目的计划完成情况。
关键词:四轴飞行器控制 stm32 通信设计引言随着社会的发展和科技的进步,我们迎来了新的时代。
在这个高速发展时代,所有的物品都在日新月异的变化。
我们小时候的纸飞机玩具变成了现在的遥控飞机,其中的四轴飞行器备受大众喜欢。
但是四轴飞行器的用处还有多,如林业,侦察,航拍,运输,娱乐观赏等领域,目前热门的航拍就是基于稳定四轴及云台搭建的平台实现,然后其他邻域应用还有相当的潜力。
四轴飞行器将会是很有潜力和未来需求的,代替人类运输,派遣去危险的地方拍摄,或者是交通,个人飞行器等等。
所以四轴飞行器以后一定可以成为主流产品,在生活的方方面面都可能会用到。
1项目1.1 项目描述近年来,国内科技领域对四轴飞行器的研究如火如荼,相关技术得到了迅速的发展。
随着信息化时代的蓬勃发展, 科学技术不断更新, 飞行器被广泛的应用在军事侦查、航拍以及民用快递运输等诸多行业。
四轴飞行器结构简单,操作灵活,单位体积内可提供巨大的升力,适合在狭窄环境中飞行,携带各种电子设备可执行各种任务,例如军事侦察、定位跟踪、农田监测等,在军事、民用等领域均有广泛的应用和广阔的前景。
本项目设计了一种基于STM32的微型四轴飞行器控制系统,以STM32单片机为主控制器,MPU6050为惯性测量单元模块核心,3.7V锂电池供电,通过蓝牙模块或wifi模块实现在手机App上来控制飞行器,或者通过自制遥控器来控制。
四旋翼飞行器设计
摘要本设计采用瑞萨R5F100LEA单片机作为主控制器。
超声波传感器实时发送飞行高度数据给主控系统,主控制器通过判断、分析、处理产生控制信号进而控制各个电机,使其在不同的飞行高度具有不同的速度,保证了飞行器在某一高度范围内飞行;主控制器读取MPU6050陀螺仪的数据,通过对采集数据的分析,使飞行器做出相应的姿态调整,来保持飞行器能够平稳飞行;激光传感器能够对白色场地上的黑线进行识别,达到循迹的目的。
本设计通过对飞行控制系统的总体框架设计,实现了飞行控制系统的硬件设计和软件设计,并对设计中的关键技术问题进行了研究,最终实现了四旋翼飞行器的一键启动自主飞行控制。
关键词:R5F100LEA 传感器姿态控制四旋翼飞行器1. 四旋翼自主飞行器简介1.1 结构形式四旋翼飞行器采用四个旋翼作为飞行的直接动力源,旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,旋翼1和旋翼3逆时针旋转,旋翼2和旋翼4顺时针旋转,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备。
四旋翼飞行器的结构形式如图 1.1 所示。
图1.1 四旋翼飞行器结构形式1.2 工作原理传统直升机是通过控制舵机来改变螺旋桨的桨距角,从而控制直升机的姿态和位置。
四旋翼飞行器与此不同,是通过调节四个电机转速来改变旋翼转速,实现升力的变化,从而控制飞行器的姿态和位置。
由于飞行器是通过改变旋翼转速实现升力变化,这样会导致其动力部稳定,所以需要一种能够长期保稳定的控制方法。
四旋翼飞行器是一种六自由度的垂直升降机,因此非常适合静态和准静态条件下飞行。
但是四旋翼飞行器只有四个输入力,同时却有六个状态输出,所以它又是一种欠驱动系统。
图 1.2 四旋翼飞行器垂直和俯仰运动四旋翼飞行器结构形式如图所示,电机1和电机3逆时针旋转的同时,电机2和电机4顺时针旋转,因此当飞行器平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
SSN 1006—7l67 西 下
睑室研究
AND E P1 ORAT 与探索 ON lN 1.ABORATOR、 第35卷第10期2016年l0月
Vo1.35 No.10 Oct.2016
基于WiFi的微型四旋翼飞行器设计 符长友‘, 蔡洪斌 , 李 行’, 谢 伟 , 舒 琪。 (1.四川理工学院计算机学院,四川自贡643000;2.电子科技大学计算机科学与T程学院,四川成都610054)
摘 要:为了进一步提高微型四旋翼飞行器的稳定性、转向灵活性与可控性,提出 并采用多种传感器、WiFi无线通信、嵌入式微控制器等多种技术,并结合四元数、双 闭环PID控制等,设计出一款基于WiFi的微型四旋翼飞行器。详细阐述了该系统 构成、硬件设计与软件设计。实践表明,飞行器机身采用“X”型设计,软件系统采 用四元数、双闭环PID控制等,其飞行稳定性高、可控性好、转向更灵活。 关键词:四旋翼飞行器;微型;WiFi;多种传感器;四元数;PID 中图分类号:V 249.122 .2 文献标志码:A 文章编号:l006—7167(20l6)l0—0l17—04
Design of WiFi-based Mini Four Rotor Aircraft FU Chang.you’,CAI Hong—bin ,LI Hang‘
,XIE Wei。
,SHU Qi’
(1.School of Computer Science,Sichuan University of Science&Engineering,Zigong 643000,China;2.School of Computer Science and Engineering,U niversity of Electronic Science and Technology of China, Chengdu 610054,China)
Abstract:In order to further improve the stability,steering flexibility and controllability of mini four—rotor aircraft (MRRA),an MRRA based on WiFi has been designed by adopting various techniques,such as multiple sensors,WiFi wireless communication.embedded microeontroiler,etc.It was also combined with quaternion and dual closed-loop PID.This paper described system structure,hardware design and software design of the MRRA based on WiFi in detail. Practice shows that the M RRA based on WiFi has some more traits,such as high flight stability,good controllability, flexible steering by the“X”type design in hardware and the quaternion&dual closed—loop PID in software. Key words:four—rotor air('rafl;mini;WiFi;multiple sensors;quaternion;PID compensator
0 引 言 随着微机电系统的发展,单旋翼直升机一直是微 型飞行器发展的研究平台,但其复杂性及不稳定性限 制了它的发展。如今,一种新型的微型多翼飞行器,特
收稿日期:2016-02 2 基金项目:国家863计划项¨(2015AA016010);四川省院十工作站 基金项口(2014YSGZZ01);2015年四川省大学生创新创业洲练计划项 目(20l5l0622004);2015年门贡市科技创新苗子丁程项目 (2015CXM07):2016年四川省教育厅科研重点项LI(16ZA0258);物联 网 程 业课程体系的改革与实践项日 作者简介:符长友(1976一),男,四川岳池人,学士,高级实验师,主 要从事物联网应用研究 te1.:I 3990076672;E-mail:fcybill@163.COB
别是四旋翼飞行器越来越受到人们的重视…。由于 微型四旋翼飞行器结构巧妙简单、成本低廉、外形新 颖,通过反扭矩作用使飞行器扭矩平衡,而毋需专门的 反扭矩桨,所以这种独特控制方式的飞行器设计起来 比直升机简单得多。而且采用四旋翼结构可有效提高 飞行器的载荷能力 。 。微型四旋翼飞行器具有可垂 直起降、自由悬停、快速变向和姿态转换等特性,并且 噪音小、隐蔽性强,能够在各种极端恶劣的环境(如核 生化威胁等)或狭小的空间内飞行。此外,微型四旋 翼飞行器还能适应各种情况、各种姿态的飞行,具有高 度智能化的优点。微型四旋翼飞行器在现代军事、工 业、民用等领域均具有广阔的应用前景 。因此微型 四旋翼飞行器是一个重要的、全新的研究热点。 ll 8 第35卷 l 工作原理 微 【Jq旋翼飞行器采J{j 4个旋翼作为其直接的 行动力,旋翼埘称分布在机体的左右、前后4个方向, 『I.4个旋噗要求处于同一高度平丽,其材质、结构与半 径均卡H M,分别由4个独立的相刚电机来 动。4个 旋翼分别以逆时针和顺时针两个方向旋转,相邻旋翼 转动方向相反,对伯线一I 的旋越转动方向相同。通过 调节4个电机的转速来改变旋翼转速,以实现空间6 个运动自由度(分别沿 、】/、z坐标轴作平移和旋转运 动)和4个可以控制的基本运动状态(上下飞行、前后 飞行、滚转飞行和偏航飞行) ,如图l所示。这样, 有效实现了微型四旋翼飞行器的多种飞行姿态和飞行 控制。
图I 微 四旋樊 行器1 作原理结构罔 2 系统构成 皋于WiFi的微型四旋翼飞行器南微型四旋翼飞 行器与飞行控制系统构成,两者之间通过WiFi进行数 据通信。微型四旋翼飞行器通过WiFi无线通信方式 接收飞行控制系统发来的 行参数、命令控制字,来控 制四个A流电机的转速,使旋翼产生相应的转动,以实 现所需的飞行方式与飞行姿态。同时,fj王把飞行参数 通过WiFi反馈给色行控制系统。 微型四旋翼l{‘行器 系统微控制器、3轴陀螺仪 传感器、3轴加速度传感器、3轴磁力传感器、WiFi尤 线通信模块、直流电机、状态显爪LED灯等组成,见图 2。此外,为了进一步减轻飞行器的重量,机身采用 “x”型设计(见图3),使飞控板大面积镂空,这样在不 降低飞控受力的情况下以尽可能减轻飞控板的重量。 飞行控制系统,即一款安装在iPad上的管理软 件,Hj户通过操作该软件,实现对微型四旋翼飞行器的 控制管理,并使其处于:垂直l 升、垂直下降、向左、向 右、向前、向后、滚转、 中自由悬停等飞行以及紧急停 机,同时微型四旋翼飞行器的l{l行姿态与相关数据也 会实时 示在该飞行控制系统上。
3 硬件设计 3.1 陀螺仪传感器 陀螺仪传感器实时峪测飞行器相对于标准的 、
圃1 俯仰卜-J l l l
耋Il l羹l差Il蓁l l 图2 微,鲤四旋樊 行器系统功能
『皋1 3 微型叫旋翼飞{ 器 y、Z坐标轴的偏离,从 知晓飞行器是否按照要求飞 行。陀螺仪传感器采刚FXAS2l002芯片 该器件是
一款小型、低功耗H带3个16位ADC的角速率的3 轴MEMS陀螺仪芯片。其量程范同为±250/500/ 1000/2000。/s, 精度最高为0.0625。/s。采用l c【j SP1接口与外部微控制器卡H连,其输出数据率为12.5
~800 Hz 内部集成了一个低通滤波器,允许控制器 限制数字信号的骷宽“ 。由于SPI接口的波特率比 I C快得多,为了确保数据的实时性,设计l1、f采 SPI 通信, 微控制器所对应的SPI 接LJ相连 电路设 汁如图4所示 , 3.2加速度与磁力传感器 加速度及磁力传感器主要监测飞行器的加速度及 方向,有效监管飞行器的飞行状态 、荇采川分离的lJ】Il 速度、磁力传感器,不仅电路更复杂,而且禚个电路的 重量更重,这样极大地影响_r四旋翼飞行_器的飞行性 能与载重。r大1此选用加速度、磁力传感器集为一体的 高性能传感器——Fx0s8700cQ 片。该器件是一款 小型、低功耗,3轴线性加速度与3轴磁力的传感器 加速度传感器采H{l4位的ADC,其测量范围为±2、 ±4、±8 g 磁力传感器采,H={l6位的ADC,其测鲢 范同为±l200 p,T川 。该传感器采川SPI接口与外部 微控制器相连,与 SPI1接口相连,其电路没计如罔5
一一一一一一一一一一一一~一~一一一一 一 符长友,等:瘪于W i的微型四旋翼飞行嚣设计 gI 4 F AS21002 IU }}【 iI’J冬1 冬1 5 p X()S8700CQ IU蹄波汁 3.3 WiFi通信模块
I WiFi通信址做J 凹旋龚 行控川系统 之问进行数据交 { 的桥梁.选川I{N l723模块 陔儆 块是一款独● 的、『J、J嵌2.4(川Z IEEE 802.I1 I)/g卞I! 块,其集成丫f 抓、I 节 、 咀路、功率放人{扑} 等 支持lnfi‘tlS[I‘II(・tLl1"{ ̄b-SoflAP网络模式,1人J 络麻川 序:T【=l’,uI) DHClJ'1)NS,ARP,HTI I’客广 端 FTt’客 端 板载TCP/ 络 议栈以J)乏呲・ 的M Ac地川: 支持uART通f 受『l,使 E}=I简单的A,I 命令字与外部微处J=I}! 进行汝i- 操作” 号l 剁陔 模块如果采』{J外邴人线, 仅 暇吐增加, i 且也影响 行器的止 ’ 行 l夫1此录川板栽1火线,其电路没汁 如罔6所示 3.4系统微控制器 微控制 作为微型 旋 行器的核心纠l成部 分,不仪要及l{1f谈取符个传感 的数据, l1.还 进行 快速数据处理, 控制4个电机,II-L ̄I-还要把相火处理 通过WiFi传给 仃 制系统,Ji l 寅时 爪飞行 的飞行姿念 杉虑钊传感器、wiFi模块的通f 披LJ 及数据处理述串, 此选用高 能的I,PC212 4l 陔芯 片是一款低功耗、多功能,32化ARM7TDMI—S『人】核的 微控制器.I』、】 256 k1)离性能Hash仔储器 土顿 叮达60 MHz,1人】部 32位定IIlf ,46个cI’I()【J. 10 f蔓ADC,32 f PWM,RI C以技l C、SPI、【 ARrr通信