218常用机械传动运动简图
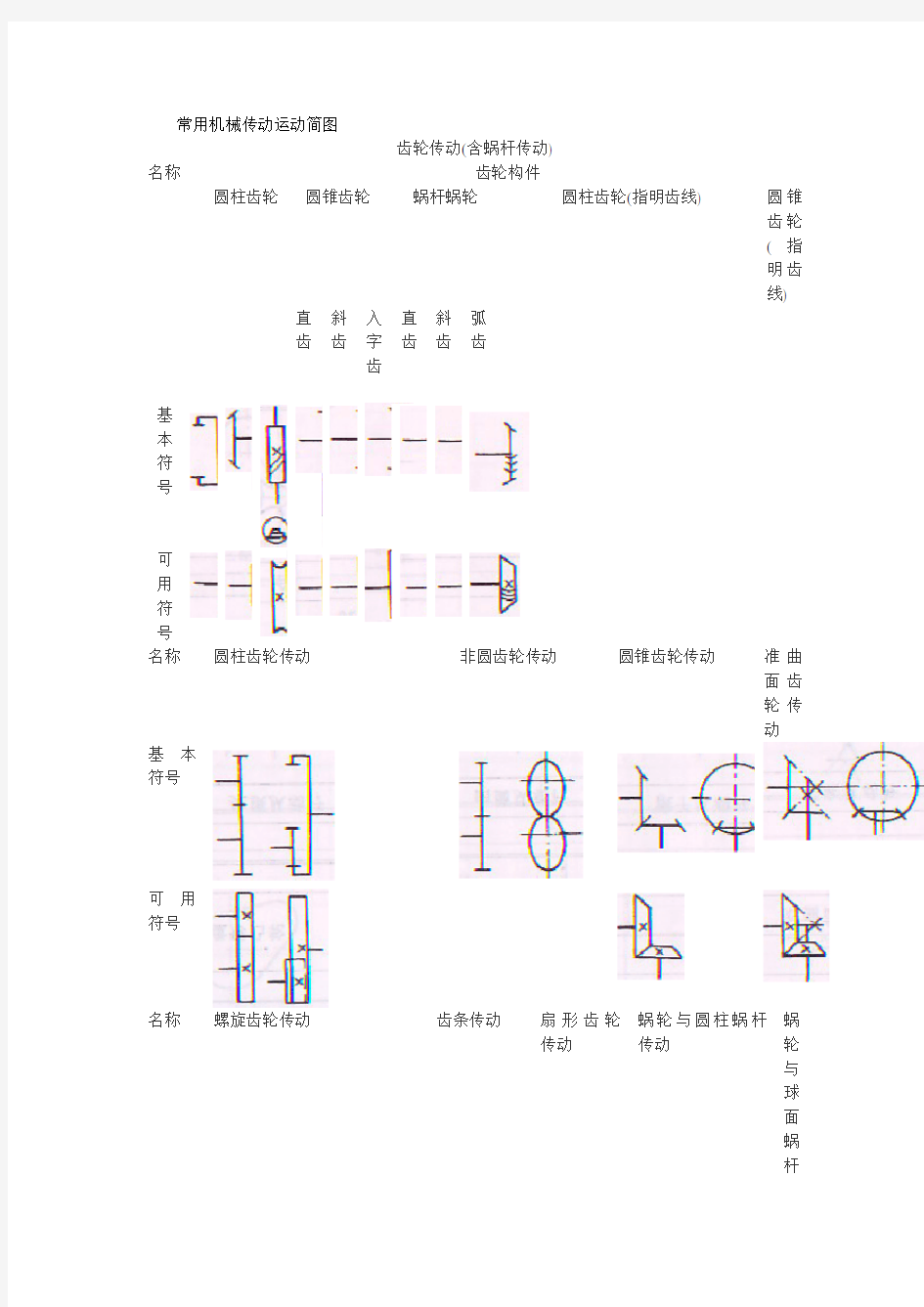

218常用机械传动运动简图 齿轮传动(含蜗杆传动)
名称
齿轮构件
圆柱齿轮
圆锥齿轮
蜗杆蜗轮 圆柱齿轮(指明齿线)
圆锥齿轮(指明齿线)
直齿
斜齿 入字齿
直齿
斜齿 基本符号
可用符号
名称
圆柱齿轮传动
非圆齿轮传动
圆锥齿轮传动
准曲面齿轮传动
基本符号
可用符号
名称
螺旋齿轮传动
齿条传动
扇形齿轮传动
蜗轮与圆柱蜗杆传动
蜗轮与球面蜗杆传
动
基本符号
可用符号
摩擦传动 名称 圆柱轮
圆锥轮
可调圆锥轮 可调冕状轮
基本符号及可用符号
带传动
名称 一般符号 轴上宝塔轮
不指明类型
指明带的类型时
基本符号
链传动 名称 不指明类型
指明链条类型
基本符号
螺杆传动
名称
整体螺母 开合螺母
滚珠螺母
基本符号及可用符
号
机械运动简图的测绘
机械运动简图的测绘 一、目的 1. 学会根据各种机械实物或模型,绘制机构运动简图; 2. 解机构自由度的概念,掌握机构自由度的计算方法; 3. 加深对机构结构分析的了解。 二、设备和工具 1. 机械实物(如:牛头刨床、插齿机等); 2. 机构的模型(如:简易冲床、颚式破碎机、内燃机模型、油泵模型等); 3. 测量工具:刚尺、内外卡钳、刚皮尺、量角器(根据需要选用); 4. 绘图工具:三角板、铅笔、圆规、橡皮、草稿纸(自备)。 三.原理和方法 1 .原理: 由于机构的运动仅与机构中所有构件的数目和构件所组成的运动副的类型、数目及相对位置有关,因此,在绘制 机构运动简图时,可撇开构件的形状和运动副的具体构造,而用一些简略的符号(见教科书或机械设计手册中国家标 准 GB4460-84 “机械制图机构运动简图符号”的规定)来代替机构和运动副,并按一定的比例尺表示运动副的相对位 置,以此表明机构的运动特征,以便于进行机构运动系和动力系方面的分析。 2 .测绘方法、步骤: ① 首先仔细观察机器实物或模型,了解机器中各构件的相对运动关系,并正确地区分各个运动机构及各运动副的 特征,从而确定组成机构的构件数目及运动副类别。对于两个构件的相对运动非常微小而不易感觉到地方应特别加以注 意且不可误认为刚性联接。 ② 适当选择视图,并在草稿纸上徒手按规定的符号及构件的联接次序逐步画出机构运动简图的草图。然后用数字 1 , 2 , 3 ……,分别标注各构件,用字母 A , B , C ……分别标注各运动副。 ③ 计算机构的运动度并籍此检查所绘机构运动简图的草图是否正确。应当指出,在计算自由度时应除去虚拟约束 条件及局部自由度。自由度检查无误后再任意假定原动件的位置,并测量机构各运动副间的相对位置及机构尺寸,最后
实验一_机械运动简图的测绘
实验一机械运动简图的测绘 一、实验目的 1、掌握从实际机构中测绘机构运动简图的基本技能和正确标注运动尺寸。 2、巩固和熟练机构自由度的计算。 3、掌握运动链的运动是否确定的判别方法。 4、分析一些四杆机构的演化过程和验证其曲柄存在的条件。 二、实验设备和工具 各种机器模型 此外自备三角板、铅笔、橡皮、草稿纸。 三、实验原理 由于机构的运动仅与机构的类型、机构中构件的数目、运动副的数目、种类及其相对位置有关。因此在分析机构运动时,可以撇开构件的复杂外形和运动副的具体构造,而用简单的符号来代表构件和运动副,并按一定的比例尺表示运动副的相对位置,即机构运动简图,并以此分析,说明实际机构的特征。 四、实验步骤 l、缓慢地使被测绘的机构或模型运动,由原动件开始仔细观察其运动传递过程,按相对运动情况分清各个运动构件,确定组成该机构的构件的数目、运动副的种类和数目。 2、在草稿纸上,按运动传递顺序,根据规定的符号(见附录),徒手绘出机构运动简图,用1、2……标注各构件,用A、B……标注各运动副。 3、仔细测量机构中各运动副之间的相对位置,即转动副间的中心距和移动副导路的位置尺寸或角度等,标在徒手绘制的机构运动简图中。 4、根据所测绘的机构运动简图,计算该机构自由度,并与实际机构核对是否正确。 五、实验报告要求 1、写上被测机构的名称及机构的自由度数。 2、写上被测机构中原动件数目及判断运动是否确定。 将草图画成正规的运 3、任意假定原动构件的位置,并按一定的比例尺寸u 1 动简图。 =实际长度(毫米mm)/图上长度(毫米mm) 比例尺寸u 1 六、思考题 l、一个正确的"机构运动简图"应能说明哪些内容? 2、绘制机构运动简图时,原动构件的位置为什么可以任意选定?会不会影响简图的正确性? 3、机构自由度的计算对测绘机构运动简图有何帮助?
(新)机构运动简图测绘与分析实验
实验一机构运动简图测绘与分析实验 一、实验目的 1.根据机构模型,掌握正确绘制平面机构运动简图的方法和技能。 2.验证和巩固机构自由度的计算,进一步理解机构自由度的概念。 3.应用机构自由度的计算方法,分析平面机构运动的确定性。 4.掌握平面机构的组成原理,能够对平面机构进行结构分析。 二、实验设备 1、机构模型(铆钉机构B1、简易冲床B 2、装订机机构B 3、鄂式破碎机B 4、步进输送机B 5、假肢膝关节机构B 6、机械手腕部机构B 7、抛光机B 8、牛头刨床B 9、制动机构B10等); 2.所用工具:钢板尺、游标卡尺、三角板、铅笔、圆规、橡皮、纸(除钢板尺和游标卡尺外,其余学生自备)。 三、实验内容 1. 选择5种机构模型进行测量,绘制机构运动简图; 2. 计算机构自由度,并注明其活动构件数、低副数、高副数,然后代入公式进行计算。 3.对所选择的机构进行结构分析,确定机构的级别。 四、实验原理、方法和手段 在对现有机械设备进行分析或设计新的机械设备时,都需要运用其机构运动简图。而机构各部分的运动是由其原动件的运动规律、该机构中各运动副的数目、类型,运动副相对位置和构件的数目来确定的,而与构件的外形、断面尺寸、组成构件的零件数目及运动副的具体构造等无关。所以,只要根据机构的运动尺寸,按一定的比例尺定出各运动副的位置,就可以用运动副的代表符号和简单的线条把机构的运动简图画出来。
常用符号见下表: 1、机构运动简图的概念 抛开构件的复杂外形和运动副的具体结构,利用简单的线条和规定的符号来代表每一个构件和运动副,并按一定的比例将机构的运动特征表达出来的简单图形称为机构运动简图。机构运动简图与原机构具有完全相同的运动特性,因而可以根据该图对机构进行运动分析和动力分析。 2、测绘方法 (1)分析运动情况。绘制机构运动简图时,首先要把该机器或模型的实际构造和运动情况搞清楚。为此,先应确定出原动件和从动件,再使被测机器或模型缓慢运动,然后按照运动的传递路线,把原动件和从动件之间的各构件的运动情况观察清楚,尤其应注意有微小
初中物理机械运动图像汇编
《机械运动图像题》中考汇编 1.【上海毕业】小华乘水上游船进入世博园的过程中,若以游船为参照物,浦江两岸的建筑物是 的。如图所示的s-t 图像反映了游船在某段江面时的运动情况,由图像可得该游船行驶的速度为 米/秒,它在30秒内通过的路程为 米。 2.【10淮安】小华同学根据实验记录数据.描绘出 玩具小车路程随时间变化的关系图象.如图所示.由 图象可知,计时s 后小车开始运动;1s 至5s 小车通 过的路程是m ,速度是m /s . 3.【10沈阳】.一个骑自行车的人与一个跑步者在 平直路面上运动,他们通过的路程随时间变化的图象 如图所示。分析图象可知,跑步者的速度为 ________m/s 。在运动过程中,若以跑步者为参照物, 骑车者是________的。 4.(2011哈尔滨)甲、乙两辆汽车在水平路面上同 时向东行驶,路程一时间图像如图所示,则甲车的速度是_______m /s ;两车行驶过程中,若以甲车为参照物,乙车向________运动. 5.【10济宁】甲、乙两物体从同一地点出发沿同—方向运动其路程S 跟时间t 的关系图像如图所示。仔细观察图像,你能获得什么信息? (写出一条即可) 6.(江苏徐州市)小刚从家中出发到达彭城广场后,沿原路返回家中,其中一半路程步行.一半路程骑自自行车。路程与时间图像如图所示。则步行的是图中_______段,小刚家到彭城广场的路程为__________m ,小刚骑车的速度为______m /s 。 7.(2011攀枝花)一只兔子和一条小狗从同一地点出发,同时开始向东运动,兔子的运动距离与时间关系图象如图中实线部分ABCD 所示,小狗的运动距离与时间关系图象如图中虚线部分AD 3s 内,小狗相对于兔子将向_______运动(选填“东”或“西”)。 s/m t /s 8 6 4 2 0 8 2 4 6 A B C D
机械原理1-3章答案
<机械原理>第八版 第2章 2-1 何谓构件?何谓运动副及运动副元素?运动副是如何进行分类的? 答:参考教材5~7页。 2-2 机构运动简图有何用处?它能表示出原机构哪些方面的特征? 答:机构运动简图可以表示机构的组成和运动传递情况,可进行运动分析,而且也可用来进行动力分析。 2-3 机构具有确定运动的条件是什么?当机构的原动件数少于或多于机构的自由度时,机构的运动将发生什么情况? 答:参考教材12~13页。 2-4 何谓最小阻力定律?试举出在机械工程中应用最小阻力定律的1、2个实例。 2-5 在计算平面机构的自由度时,应注意哪些事项? 答:参考教材15~17页。 2-6 在图2-20所示的机构中,在铰链C、B、D处,被连接的两构件上连接点的轨迹都是重合的,那么能说该机构有三个虚约束吗?为什么? 答:不能,因为在铰链C、B、D中任何一处,被连接的两构件上连接点的轨迹重合是由于其他两处的作用,所以只能算一处。 2-7 何谓机构的组成原理?何谓基本杆组?它具有什么特性?如何确定基本杆组的级别及机构的级别? 答:参考教材18~19页。 2-8 为何要对平面高副机构进行“高副低代"?“高副低代”应满足的条件是什么? 答:参考教材20~21页。 2-9 任选三个你身边已有的或能观察到的下列常用装置(或其他装置),试画出其机构运动简图,并计算其自由度。1)折叠桌或折叠椅;2)酒瓶软木塞开盖器;3)衣柜上的弹簧合页;4)可调臂台灯机构;5)剥线钳;6)磁带式录放音机功能键操纵机构;7)洗衣机定时器机构;8)轿车挡风玻璃雨刷机构;9)公共汽车自动开闭门机构;10)挖掘机机械臂机构;…。 2-10 请说出你自己身上腿部的髋关节、膝关节和踝关节分别可视为何种运动副?试画出仿腿部机构的机构运动简图,并计算其自由度。 2-11图示为一简易冲床的初拟设计方案。设计者的思路是:动力由齿轮j输入,使轴A连续回转;而固装在轴^上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。 1)取比例尺绘制机构运动简图 2)分析是否能实现设计意图
实验一机构运动简图的测绘及分析
实验一机构运动简图的测绘及分析 一、实验目的: 1、掌握机构运动简图测绘的基本方法; 2、巩固机构自由度的计算。并验证机构具有确定运动的条件; 3、通过对机构进行结构分析,了解结构的组成原理 二、设备和工具 机器和机构模型量具铅笔橡皮和草稿纸 三、实验原理 机构运动与机构中的构件的数目、构件组成运动副的形式以及各运动副的相对位置有关,而与构件的复杂外形和运动副的具体结构无关,因此,在工程上对 机构进行结构分析、运动分析和力分析时可以用机构运动简图来进行。 机构运动简图既简单又能正确地反映一部机器的运动特征,因此,正确地测量和绘制机构运动简图是机械设计的重要组成部分、 四、实验方法与步骤 1、观察机构的运动,弄清构件的数目 缓慢移动被测的及其或机构模型,从原动件开始,根据运动传递路线,仔细观察相连接的两构件是否有相对运动,特别要注意那些运动很微小的构件,从而弄清楚组成机构的构件数目。 2、判别运动副类型 一般,从原动件开始,遵循运动传递的顺序,仔细观察各相邻构件之间的相对运动性质。由此确定机构中运动副的类型、数目 3、合理选择视图 一般选择与机构的多数构件运动平面平行的平面作为投影面。必要时也可以
就机构的不同部分选择两个或者两个以上的投影面,然后展开到一张图面上。或者把主运动简图上难于表示清楚的部分,另绘一张局部简图。 对于齿轮机构则可选择与运动平面相垂直的平面作为投影面。总之,以简单清楚的把机构的运动情况表示出来为原则。 4、画出机构运动简图的草图,计算机构的自由度。 将原动件转到某一位置(即可看清多数活动构件和运动副的位置)。在草稿纸上按照规定的符号,目测尺寸使实物与图形大致成比例,徒手画出机构运动简图的草图,然后计算机构的自由度,并将草图与实物对照,观察是否和实物相符合。 5、画正式的机构运动简图。 确定尺寸比例尺,认真测量机构各运动副之间的相对位置参数,在实验报告纸上用三角板和圆规,将上述草图按照选定的比例尺卩1(构件的真实长度与图示长度的比值,单位为m/mn或mm/mn画出正式的机构运动简图。 注:对于某些不便直接测定的机构尺寸,可首先分析其机构的性质,采用间接测量的办法。
平面机构及其运动简图
第一章 平面机构及其运动简图 案例导入:通过硬纸片是否钉在桌面上及常见的推拉门、活页等例子,引入自由度、铰链、铰接、约束条件和运动副、运动链、机构等概念,介绍运动副的分类;以牛头刨床为例子导入运动简图,介绍用简单的符号和图形表示机器的组成和传动原理。 第一节 平面运动副 一、平面运动构件的自由度 平面机构是指组成机构的各个构件均平行于同一固定平面运动。组成平面机构的构 件称为平面运动构件。 两个构件用不同的方式联接起来,显然会得到不同形式的相对运动,如转动或移动。为便于进一步分析两构件之间的相对运动关系,引入自由度和约束的概念。如图1-1所示,假设有一个构件2,当它尚未与其它构件联接 之前,我们称之为自由构件,它可以产生3个独立 运动,即沿x 方向的移动、沿y 方向的移动以及绕 任意点A 的转动,构件的这种独立运动称为自由度。 可见,作平面运动的构件有3个自由度。如果我们 将硬纸片(构件2)用钉子钉在桌面(构件1)上, 硬纸片就无法作独立的沿x 或y 方向的运动,只能 绕钉子转动。这种两构件只能作相对转动的联接称 为铰接。对构件某一个独立运动的限制称为约束条件,每加一个约束条件构件就失去一个自由度。 二、运动副的概念 机构是具有确定相对运动的若干构件组成的,组成机构的构件必然相互约束,相邻 两构件之间必定以一定的方式联接起来并实现确定的相对运动。这种两个构件之间的可动联接称为运动副。例如两个构件铰接成运动副后,两构件就只能绕轴在同一平面内作相对转动,称为转动副,见图1-2a)、b)所示。又如图1-2d)所示,一根四棱柱体1穿入另一构件2大小合适的方孔内,两构件就只能沿轴线X 作相对移动,称之为移动副;图1-2c)所示为车床刀架与导轨构成的移动副。我们日常所见的门窗活叶、折叠椅等均为转动副,推拉门、导轨式抽屉等为移动副。 图1-1 自由构件 图1-2 平面低副
机构运动简图的测绘和分析试验报告
实验一机构运动简图的测绘和分析 一.实验目的 1.学会根据各种机械实物或模型,绘制机构运动简图; 2.分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法; 3.加深对机构结构分析的了解。 二.设备和工具 1.各类典型机械的实物(如:缝纫机等) 2.各类典型机械的模型(如:内燃机模型、牛头刨床等); 3.钢皮尺,内外卡钳,量角器(根据需要选用); 4.三角板,铅笔,橡皮,稿纸(自备)。 三.原理和方法 1.原理 由于机构和运动仅与机构中所有的构件的数目的构件所组成的运动副的数目、类型、相对位置有关,因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简略的符号(如教科书和机械设计手册中有关“常用构件的运动副简图符号”的规定)来代替构件和运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。表1-1为常用符号示例。 2.方法 (1)确定组成机构的构件数目 测绘时使被测绘机械缓慢运动,仔细观测机构的运动,区分各个运动单元,从而确 定组成机构的构件数目,找出原动件。 (2)测绘运动副的种类、数目 根据相联接两构件的接触情况及相对运动的特点,确定各个运动副的种类。(3)合理选择投影面,坐标和原动件位置 选与机构的各个构件上的点运动平面皆平行的平面,或选能反映机构运动特征的其 他平面做投影面。 转动(或移动)原动件,找出每个构件都能表达清楚的原动件位置。 (4)绘机构运动简图的示意图 徒手按规定的符号,凭目测,使图与实物大致成比例(转动副位置、移动副导路方
位,高副接触点及曲率),从原动件开始,依构件的连接次序,逐渐画出机构运动 简图的示意图。用数字1、2、3……区分构件,用字母A、B、C……区分运动副。(5)绘正式机构运动简图 仔细测量与机构运动有关的尺寸,即转动副间的中心距和移动导路的方向等,按适 当的比例尺画出正式机构运动简图。 四.步骤和要求 1.对指定绘制的几种机器或机构运动简图,其中至少有一种需按确定的比例尺绘制,其余的可凭目测,使图与实物大致成比例,这种不按比例尺绘制的简图通常称为机构示意图。
机构运动简图的测绘及分析实验指导书
实验一 机构运动简图的测绘及分析 一、目的要求 1. 学会根据各种机械实物或模型,绘制机构运动简图,了解运动副及构件的实际结构; 2. 分析和验证机构自由度,进一步理解机构自由度的概念,掌握机构自由度的计算方法; 3. 加深对机构组成原理、机构结构分析的理解。 二、设备和工具 1. 各类典型机械的实物(如:牛头刨床、缝纫机头、插齿机等); 2. 课本,三角板,铅笔,橡皮,草稿纸(自备)。 三、原理和方法 1.机构运动简图是表征机器和机构传动原理及运动特征的简单的图形,由于机构的运动特性主要与机构的构件数目、构件与构件组成的运动副数目、运动副的类型和同一构件上各运动副的相对位置有关,因此在对机构进行分析时可以撇开构件的复杂外形和运动副的具体构造。 2.测绘机构运动简图的方法: (1)使被测机械缓慢运动,从原动件开始仔细观察机构运动的传递路径,了解其工作原理,从而确定组成机构的构件数目。 (2)根据相联接的两构件间的接触情况及相对运动的性质,确定各个运动副的类型。 (3)选择最能描述各构件相对运动关系的运动平面作为投影面,让机械停止在便于绘制简图的位置。从原动件开始,用规定符号及构件的联接次序(一个构件至少与二个构件用运动副相联接)逐步画出机构示意图,然后用数字(1、2、3……)分别标注各构件,用英文字母A 、B 、C ……分别标注各运动副。 (4)仔细测量机构的运动学尺寸(如构件上两回转副的中心距和移动副导路的位置等),按适当的比例尺将示意图画成正规的机构运动简图。 长度比例尺 ()l μ=构件实际长度米图中表示该构件的长度(毫米) (5)按公式 L H 32F n P P =-- 式中: n ——机构活动构件数 P L ——平面低副个数 P H ——平面高副个数 计算机构的自由度,注意局部自由度、复合铰和虚约束。 (6)除去原动件(原动件和机架)、去除虚约束、注意复合铰链中回转副的数目、高副低代后,观察经整理后的机构运动简图中有无IV 级或III 级基本杆组(表4),若没有,则按II 级基本杆组的5种形式将机构拆分.最后根据所含基本杆组的最高级别确定机构的级别。 四、实验步骤 1. 先在草稿纸上徒手绘制机构示意图,标注出必要的运动学尺寸,再按适当比例画成正规的机构运动简图,如果只要求画机构示意图可不进行测量,这时可凭目测使简图中构件的尺寸与实物大致成比例. 2. 计算机构的自由度,并将计算结果与实际机构对照,观察是否相符.否则应重新绘制
机构运动简图的绘制
机构运动简图的绘制 【一】能力目标 能根据实物绘制机构运动简图 【二】知识目标 1.了解机构组成原理 2.理解自由度、运动副、约束的概念及三者的关系 【三】教学的重点与难点 重点:平面机构的运动简图的绘制。 难点:绘制简图时构件及运动副的表示。 【四】教学方法与手段 多媒体教学,采用动画演示、实例分析、启发引导的教学方式。 【五】教学任务及内容 一、 的组 成 (一) 运动 副 a), 轴承中的滚动体与内外圈的滚道、图b)啮合中的一对齿廓、图c)滑块与导槽,均保持直接 接触,并产生一定的相对运动。因而它们都构成了运动副。构件上参与接触的点、线、面, 称为运动副的元素。 根据运动副对构件运动形式的约束及两构件接触方式的不同,运动副可如下分类: 1、高副 两构件通过点或线接触组成的运动副称为高副。如图所示,凸轮与从动杆及两齿轮分别 在其接触处组成高副。 2、低副两构件通过面接触组成的运动副称为低副。平面低副可分为转动副和移动副。 (1)转动副若运动副只允许两构件作相对转动,则称该运动副为转动副,也称铰链。 如图所示各构件的联接就是转动副。如果转动副的两构件之一是固定不动的,则称该转 动副为固定铰链。若转动副中两构件都是运动的,则称该转动副为活动铰链。 (2)移动副若运动副只允许两构件沿接触面某一方向相对滑移,则称该运动副为移 动副。如图所示。 y (二)自由度和运动副的约束 O 12
1、构件的自由度 在平面运动中,每一个独立的构件,其运动均可分为三个独立的运动,即沿x轴和y 轴的移动及在xoy平面内的转动。构件的这三种独立的运动称为其自由度,分别用x、y及α为三个独立参数表示。由上述可知:构件的自由度等于构件的独立运动参数。 平面内自由的构件,有3个自由度,而空间内自由的构件,有6个自由度。 2、运动副的约束 当两构件通过运动副联接,任一构件的运动将受到限制,从而使其自由度减少,这种限制就称为约束。每引入一个约束,构件就减少一个自由度。 (1)转动副 2——约束,1——自由度 (2)移动副 2——约束,1——自由度 (3)平面高副 1——约束,2——自由度 (三)运动链和机构 两个以上的构件以运动副联接而构成的系统称为运动链。未构成首末相连的封闭环的运动链称为开链,否则称为闭链。在运动链中选取一个构件固定(称为机架),当另一构件(或少数几个构件)按给定的规律独立运动时,其余构件也随之作一定的运动,这种运动链就成为机构。机构中输入运动的构件称为主动件,其余的可动构件称为从动件。由此可见,机构是由主动件、从动件和机架三部分组成的。 闭链开链 二、平面机构的运动简图 机构的运动简图:撇开那些与运动无关的构件的外形和运动副的具体结构,仅用简单的线条和规定的符号来表示构件和运动副,并按比例定出各运动副的相对位置,表达机构的各构件间的相对运动关系的简图。 (一)构件的表示方法 1、构件 (1)参与形成两个运动副的构件 (2)参与形成三个运动副的构件 2、转动副构件组成转动副时,其表示方法如图。图面垂直于回转轴线时用图a表示;图面不垂直于回转轴线时用图b表示。表示转动副的圆圈,其圆心必须与回转轴线重合。一 3
机构运动简图绘制分析实验(指导书)
实验一平面机构运动简图绘制和分析 一、实验目的 1.熟悉并掌握机构运动简图绘制的原理和方法,学会根据实际机械和模型绘制机构运动简图的技能; 2.加深和巩固机构自由度的计算方法,并检验机构是否具有确定运动; 3.加深对平面机构结构分析的了解。 二、实验内容及要求 1.以指定的3~4种机构模型或机器为研究对象,进行机构运动简图的绘制; 2.分析所画各机构的构件数、运动副类型和数目,计算机构的自由度,并验证它们是否具有确定的运动; 3.进行机构的结构分析。 三、实验设备和工具 1.各种机器实物和模型; 2.学生自备铅笔、直尺、圆规、橡皮、草稿纸等; 四、实验原理 机器和机构都是由若干构件及运动副组合而成。而机构的运动是由原动件的运动规律、联接各构件的运动副类型和机构的运动尺寸(即各运动副间相对位置尺寸)来决定的。因此,在绘制机构运动简图时,可以撇开构件的形状和运动副的具体构造,而用一些简单的线条来代替构件。构件的表示法见图1。用规定的符号代表运动副,并按一定的比例尺表示运动副的相对位置,以此表明机构的运动特征。常用运动符号示例见表1-1。 五、实验步骤 1、确定组成机构的构件数:缓慢转动机器,沿着运动传递的线路仔细看清各构件间的相对运动(有些相互连接构件间的相对运动非常微小),从而确定组成机构的构件数目。
2、确定运动副的类型:根据相互连接的两构件间的接触情况及相对运动特点,确定各个运动副的类型。 3、选定视图平面:一般选择与多数构件运动平面平行的平面为视图平面。 4、绘制机构示意图的草图:凭目测在草稿纸上徒手按规定的运动副代表符号,从原动件开始,按各构件的连接次序,用简单的线条代表构件,逐步画出机构示意图的草图。用数字1、2、3……分别标准各构件,用字母 A 、 B 、 C ……分别标准各运动副。 5、计算机构的自由度数,并将计算结果与实际机构的自由度相对照,观察二者是否相符。机构自由度的计算公式:F=3n-2PL-PH (式中: n 为活动构件的数目;P L 为低副的数目; P H 为高副的数目。) 6、测量机构运动尺寸:对转动副测量回转中心间的相对尺寸;对移动副测量导路方向线和与其有关的其他运动副间的相对尺寸。 7、选取适当的比例尺:长度比例尺 ) ()(mm mm l 图纸上所画的长度构件实际长度=μ 8、绘制机构运动简图:按一定的比例尺。用制图仪器画成正式的机构运动简图。 图1 构件的表示法
第一章 平面机构的运动简图及自由度习题
第一章平面机构的运动简图及自由度 一、判断题(认为正确的,在括号内画√,反之画×) 1.机构是由两个以上构件组成的。() 2.运动副的主要特征是两个构件以点、线、面的形式相接触。() 3.机构具有确定相对运动的条件是机构的自由度大于零。() 4.转动副限制了构件的转动自由度。() 5.固定构件(机架)是机构不可缺少的组成部分。() 6.4个构件在一处铰接,则构成4个转动副。() 7.机构的运动不确定,就是指机构不能具有相对运动。() 8.虚约束对机构的运动不起作用。() 二、选择题 1.为使机构运动简图能够完全反映机构的运动特性,则运动简图相对于与实际机构的()应相同。 A.构件数、运动副的类型及数目 B.构件的运动尺寸 C.机架和原动件 D. A 和 B 和 C 2.下面对机构虚约束的描述中,不正确的是()。 A.机构中对运动不起独立限制作用的重复约束称为虚约束,在计算机构自由度时应除去虚约束。 B.虚约束可提高构件的强度、刚度、平稳性和机构工作的可靠性等。 C.虚约束应满足某些特殊的凡何条件,否则虚约束会变成实约束而影响机构的正常运动。为此应规定相应的制造精度要求。虚约束还使机器的结构复杂,成本增加。 D.设计机器时,在满足使用要求的情况卜,含有的虚约束越多越好。 三、综合题 1.图2-1中构件1相对于构件2能沿切向At 移动,沿法向An向上移动和绕接触点A转动,所以构件1与2组成的运动副保留三个相对运动。 图b中构件1与2在A两处接触,所以构件1与2组成两个高副。 图2-1 图2-2 2.如图2-2所示的曲轴1与机座2,曲轴两端中心线不重合,加工误差为△,试问装配后两构件能否相对转动,并说明理由。 3.局部自由度不影响整个机构运动,虚约束不限制构件独立运动,为什么实际机构中还采用局部自由度、虚约束的结构? 4.吊扇的扇叶与吊架、书桌的桌身与抽斗,机车直线运动时的车轮与路轨,各组成哪一类运动副,请分别画出。 5.绘制2-3图示各机构的运动简图。