光流算法
它是一种运动模式,这种运动模式指的是一个物体、表面、边缘在一个视角下由一个观察者(比如眼睛、摄像头等)和背景之间形成的明显移动。光流技术,如运动检测和图像分割,时间碰撞,运动补偿编码,三维立体视差,都是利用了这种边缘或表面运动的技术。
光流的概念:(Optical flow or optic flow)二维图像的移动相对于观察者而言是三维物体移动的在图像平面的投影。
有序的图像可以估计出二维图像的瞬时图像速率或离散图像转移。
光流算法:
它评估了两幅图像的之间的变形,它的基本假设是体素和图像像素守恒。它假设一个物体的颜色在前后两帧没有巨大而明显的变化。基于这个思路,我们可以得到图像约束方程。不同的光流算法解决了假定了不同附加条件的光流问题。
Lucas–Kanade算法:
这个算法是最常见,最流行的。它计算两帧在时间t 到t + δt之间每个每个像素点位置的移动。由于它是基于图像信号的泰勒级数,这种方法称为差分,这就是对于空间和时间坐标使用偏导数。
图像约束方程可以写为I(x,y,z,t) = I(x+ δx,y+ δy,z+ δz,t+ δt)
I(x, y,z, t)为在(x,y,z)位置的体素。
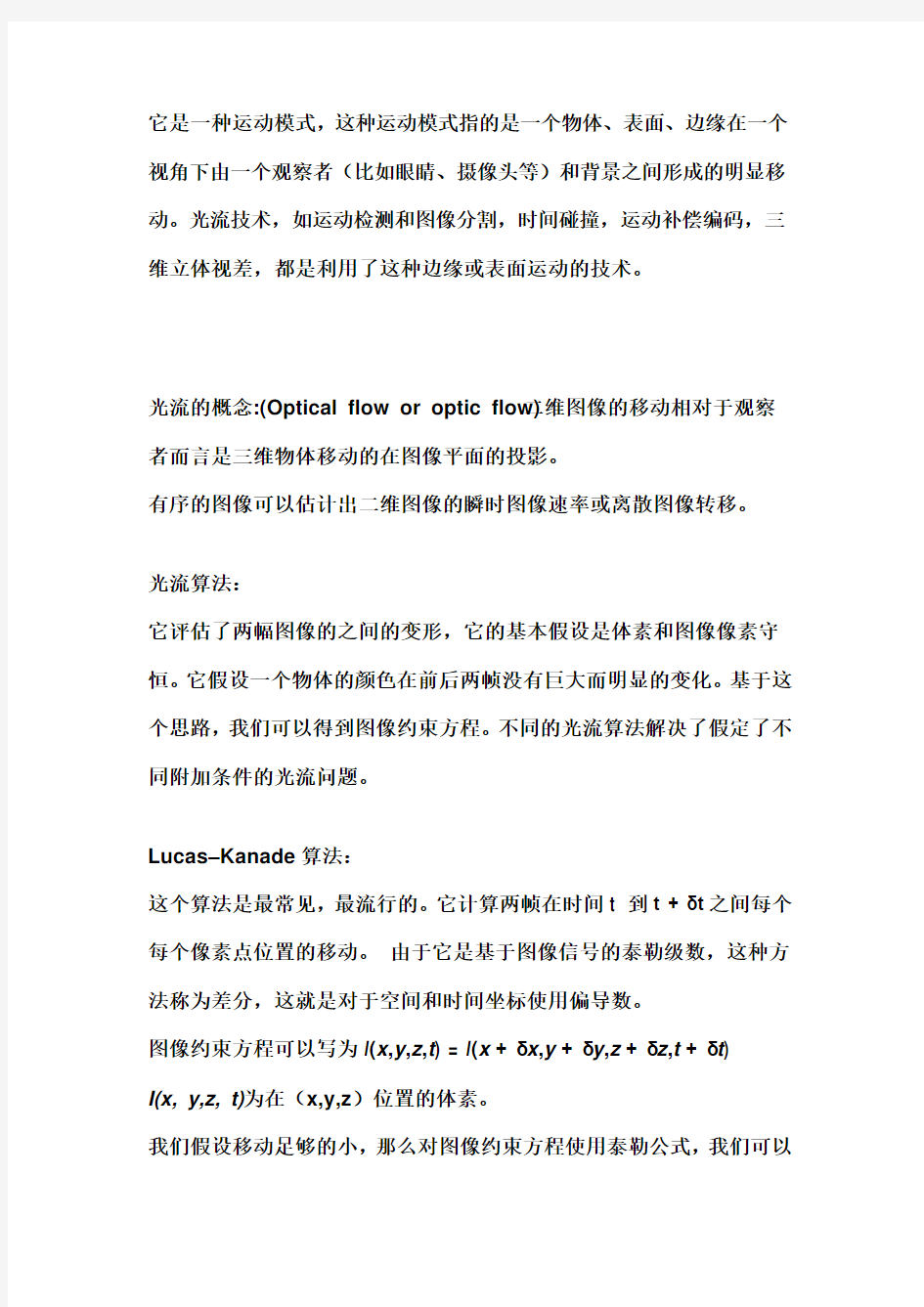
我们假设移动足够的小,那么对图像约束方程使用泰勒公式,我们可以
得到:
H.O.T. 指更高阶,在移动足够小的情况下可以忽略。从这个方程中我们可以得到:
或者
我们得到:
V x,V y,V z分别是I(x,y,z,t)的光流向量中x,y,z的组成。, , 和则是图像在(x,y,z,t)这一点向相应方向的差分。
所以
I x V x + I y V y + I z V z= ?I t。
写做:
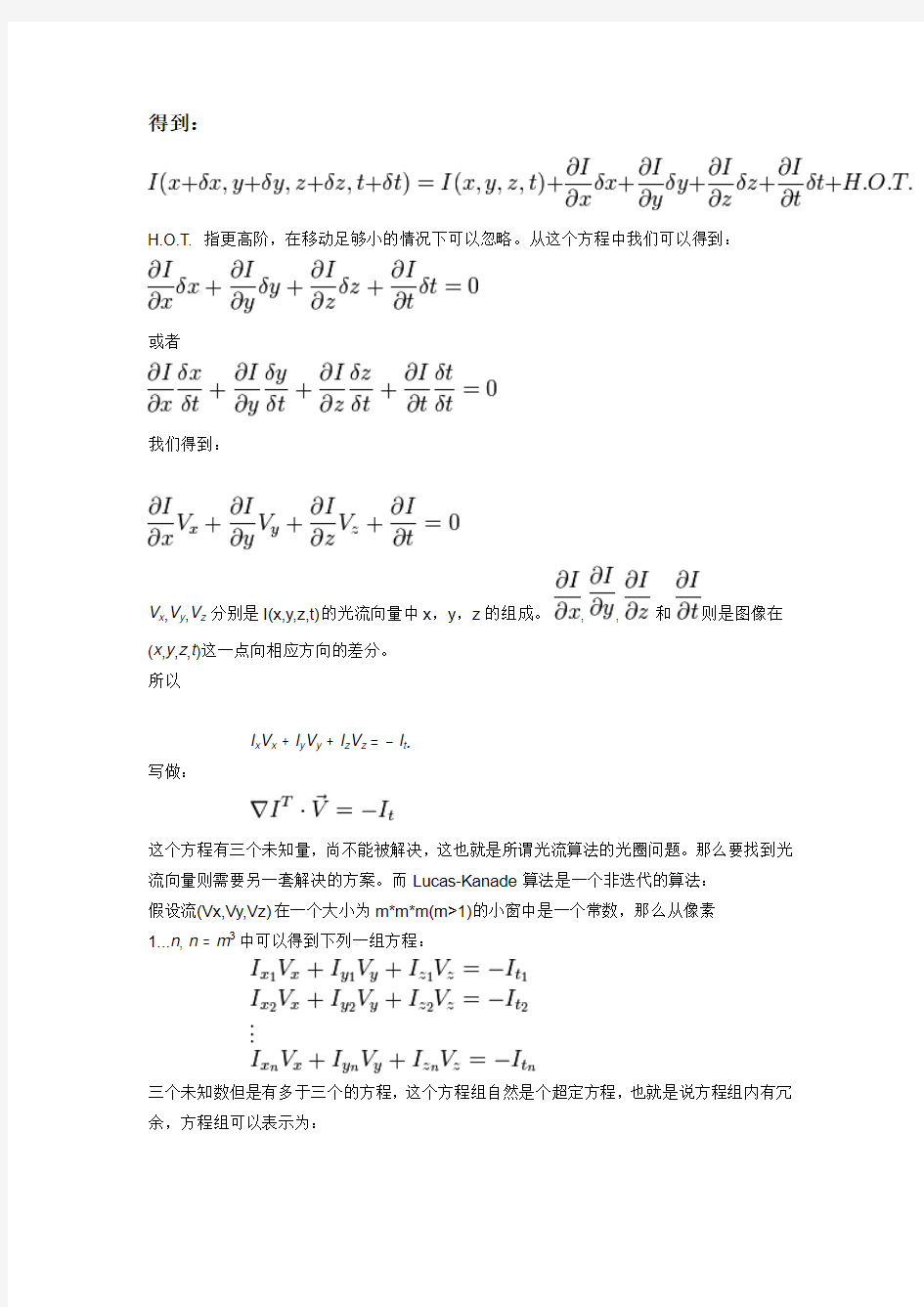
这个方程有三个未知量,尚不能被解决,这也就是所谓光流算法的光圈问题。那么要找到光流向量则需要另一套解决的方案。而Lucas-Kanade算法是一个非迭代的算法:
假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素
1...n, n = m3中可以得到下列一组方程:
三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
记作:
为了解决这个超定问题,我们采用最小二乘法:
or
得到:
其中的求和是从1到n。
这也就是说寻找光流可以通过在四维上图像导数的分别累加得出。我们还需
要一个权重函数W(i, j,k),来突出窗口中心点的坐标。高
斯函数做这项工作是非常合适的,
这个算法的不足在于它不能产生一个密度很高的流向量,例如在运动的边缘和黑大的同质区域中的微小移动方面流信息会很快的褪去。它的优点在于有噪声存在的鲁棒性还是可以的。
运动目标检测光流法
摘要 运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB 软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab
目录 1光流法的设计目的 (1) 2光流法的原理 (1) 2.1光流法的介绍 (1) 2.1.1光流与光流场的概念 (1) 2.1光流法检测运动目标的原理 (2) 2.1.1光流场计算的基本原理 (2) 2.2.2基于梯度的光流场算法 (2) 2.2.3Horn-Schunck算法 (3) 2.2.4光流法检测运动目标物体的基本原理概述 (5) 3光流法的程序具体实现 (6) 3.1源代码 (6) 3.1.1求解光流场函数 (6) 3.1.2求导函数 (9) 3.1.3高斯滤波函数 (9) 3.1.4平滑性约束条件函数 (10) 3.1.5画图函数 (10) 4仿真图及分析 (12) 结论 (13) 参考文献 (14)
1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睞,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 2.1 光流法的介绍 2.1.1 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体
一种基于图像金字塔光流的特征跟踪方法_江志军
第32卷第8期2007年8月武汉大学学报?信息科学版 G eomatics and Information Science of Wuhan University Vol.32No.8Aug.2007 收稿日期:2007205212。 项目来源:国家自然科学基金资助项目(40301040)。 文章编号:167128860(2007)0820680204文献标志码:A 一种基于图像金字塔光流的特征跟踪方法 江志军1 易华蓉2 (1 武汉大学测绘遥感信息工程国家重点实验室,武汉市珞喻路129号,430079) (2 广东商学院旅游与环境学院,广州市赤沙路21号,510320) 摘 要:推导并实现了一种基于图像金字塔光流的角点特征跟踪方法。实验结果表明,该方法在不同运动幅度和运动方式下的检测跟踪性能较好,能够有效地应用于长序列图像的特征跟踪。关键词:图像金字塔;光流;特征跟踪中图法分类号:P237.3 特征检测与跟踪是基于连续图像序列的运动 结构重建问题[1](struct ure f rom motion ,SFM )研究的重要基础和关键技术环节,在航空航天、移动机器人定位、移动量测、交通等领域有着广泛的应用。图像特征的定义及检测方法多种多样,其中最常用的是角点特征[2]。基于梯度光流的角点跟踪方法实现起来相对简单,计算复杂度较低,而且能够得到相当精确的跟踪,如L K 方法[3]。然而,该类方法在应用中也有局限性,如仅适用于小图像运动[4],要求相邻图像间的目标运动小于1个像素。 本文方法基于图像金字塔的分层结构与多分辨率特征,同级别的图像分辨率层次上动态扩展。 1 角点特征检测 对三维重建应用而言,角点是图像的一个重 要的局部特征,它最小化了图像上重要的形状信息[2]。在有图像噪声和区域变形的情况下,特征跟踪考虑到图像上多方向强度(灰度)变化为一种稳定的结构,设想围绕图像中的每个像素点来建立某个小的窗口,使该窗口在不同方向上滑动一个小的距离,并计算该窗口内所有像素强度变化的平均值。如果在所有方向滑动时,窗口内的强度变化都超过了某一门限值,那么该点即可视为检测得到的待跟踪角点。 假设窗口滑动向量为h =(u ,v )T ,定义窗口像素的灰度方差和SSD 作为滑动后强度变化的度量(对彩色图像,首先进行灰度化处理)。对图像上任一像素点p =(x ,y )T ,则有: SSD (p )= ∑W ‖I (p )-I (p +h )‖2 (1) 对I (p +h )在p 点处作一阶泰勒展开近似: I (p +h )=I (p )+I x u +I y v (2) 代入式(1)中并写成矢量形式可得: SSD (p )= ∑W ‖D I h ‖2 =∑ W h T D T I D I h , D I =(I x ,I y ) T (3) 定义 D = ∑ W D T I D I = A C C B (4) 式中,A = ∑ W I x 2 ;B = ∑W I y 2 ;C = ∑W I x I y 。A 、 B 、 C 可使用各种常用梯度算子从图像上计算得 到,本文使用Sobel 算子[5]。SSD 表达式可简写为: SSD (p )=h T Dh (5) 对于n ×n 方阵M ,可以看作是n 维欧氏空 间的线性变换,其特征矢量确定了缩放变换的方向,而其特征值表征该方向上的缩放大小,即可以根据D 的特征值来确定图像强度变化的幅度。 若‖h ‖=α,λ1、λ2为2×2方阵D 的两个特征值,且λ1≤λ2,则
三种光流算法的实现源码及测试结果
基于OpenCV的三种光流算法实现源码及测试结果 本文包括三种基于OpenCV的光流算法实现源码及测试结果。具体为HS算法,LK算法,和ctfLK算法,算法的原实现作者是Eric Yuan,这里是作者的博客主页:http://eric-yuan.me。本文对这三种光流算法进行了相关调试及结果验证,供大家在自己的项目开发中参考。 1.第一种:HS光流法(作者HORN 和SCHUNCK) #include"opencv2/core/core.hpp" #include"opencv2/imgproc/imgproc.hpp" #include"opencv2/highgui/highgui.hpp" #include
光流算法
它是一种运动模式,这种运动模式指的是一个物体、表面、边缘在一个视角下由一个观察者(比如眼睛、摄像头等)和背景之间形成的明显移动。光流技术,如运动检测和图像分割,时间碰撞,运动补偿编码,三维立体视差,都是利用了这种边缘或表面运动的技术。 光流的概念:(Optical flow or optic flow)二维图像的移动相对于观察者而言是三维物体移动的在图像平面的投影。 有序的图像可以估计出二维图像的瞬时图像速率或离散图像转移。 光流算法: 它评估了两幅图像的之间的变形,它的基本假设是体素和图像像素守恒。它假设一个物体的颜色在前后两帧没有巨大而明显的变化。基于这个思路,我们可以得到图像约束方程。不同的光流算法解决了假定了不同附加条件的光流问题。 Lucas–Kanade算法: 这个算法是最常见,最流行的。它计算两帧在时间t 到t + δt之间每个每个像素点位置的移动。由于它是基于图像信号的泰勒级数,这种方法称为差分,这就是对于空间和时间坐标使用偏导数。 图像约束方程可以写为I(x,y,z,t) = I(x+ δx,y+ δy,z+ δz,t+ δt) I(x, y,z, t)为在(x,y,z)位置的体素。 我们假设移动足够的小,那么对图像约束方程使用泰勒公式,我们可以
得到: H.O.T. 指更高阶,在移动足够小的情况下可以忽略。从这个方程中我们可以得到: 或者 我们得到: V x,V y,V z分别是I(x,y,z,t)的光流向量中x,y,z的组成。, , 和则是图像在(x,y,z,t)这一点向相应方向的差分。 所以 I x V x + I y V y + I z V z= ?I t。 写做: 这个方程有三个未知量,尚不能被解决,这也就是所谓光流算法的光圈问题。那么要找到光流向量则需要另一套解决的方案。而Lucas-Kanade算法是一个非迭代的算法: 假设流(Vx,Vy,Vz)在一个大小为m*m*m(m>1)的小窗中是一个常数,那么从像素 1...n, n = m3中可以得到下列一组方程: 三个未知数但是有多于三个的方程,这个方程组自然是个超定方程,也就是说方程组内有冗余,方程组可以表示为:
LK光流算法总结-精选.doc
运动目标检测之Lucas-Kanade 光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热 点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展 前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出 来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差 分法和光流法。 1 背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到 运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高 斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中 有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检 测的结果 2 帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的 方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常 物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
LK光流算法总结
运动目标检测之Lucas-Kanade光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。 1背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果 2帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
Farneback光流场算法数学推导
3.2.1 Farneback 算法原理剖析 该算法的总体思想就是首先通过多项式展开变换逼近两帧图像中的每个像素,然后通过观察一个多项式如何在平移下进行精确变换,最终从多项式展开系数中推导得到位移场。 1.多项式展开 多项式展开的思想[5]是将每个像素点的邻域近似表示为多项式,我们可以构造 f x ~x T Ax +b T x +c (4-1) 其中x 是该像素点的位置坐标 m ,n ,A 是一个对称矩阵 a 1a 2 a 2a 1 , b 是一个二维向量 b 1,b 2 , c 是一个标量,系数要根据加权最小二乘法对相邻信号值进行估计。 将f x 展开 f x ~c +b 1m +b 2+a 1m 2+a 2m 2+2a 2mn (4-2) 这里实际上将二维信号空间转换成了以 1,a ,b ,a 2,b 2,ab 作为基函数的六维信号空间,我们表示图像就需要一个六维向量。在编程中,为了简化计算,我们舍弃了其中的常数项,六维空间便转化为五维空间。 2.位移估计 由于多项式展开的结果是每个邻域近似表示为多项式,因此我们首先分析多项式经过理想平移的情况。 初始图像信号 f 1 x =x T A 1x +b 1T x +c 1 (4-3) 经过全局位移d ,构建得到新的信号f 2 f 2 x =f 1 x ?d (4-4) = x ?d T A 1(x ?d )+b 1T (x ?d )+c 1 =x T A 1x + b 1?2A 1d T x +d T A 1d ?b 1T d +c 1 将多项式中的系数等效 A 2=A 1 (4-5) b 2=b 1?2A 1d (4-6) c 2=d T A 1d ?b 1T d +c 1 (4-7) 得 f 2(x )=x T A 2x +b 2T x +c 2 (4-8) 通过方程(4-6),我们可以求解得到d 2A 1d =?(b 2?b 1) (4-9) d =?12 A 1?1 (b 2?b 1) (4-10) 3.结合实际考虑
一种视频微表情检测的改进光流算法
2018年6月图 学 学 报 June2018第39卷第3期JOURNAL OF GRAPHICS V ol.39No.3一种视频微表情检测的改进光流算法 李秋宇1,张玉明2,杨福猛3,詹曙1 (1. 合肥工业大学计算机与信息学院,安徽合肥 230009; 2. 芜湖职业技术学院电气工程学院,安徽芜湖 241000; 3. 安徽信息工程学院,安徽芜湖 241000) 摘要:微表情是人们在试图隐藏自己真实情感时表现出的不受自主神经控制、持续时间短暂,强度十分微弱的面部表情。由于微表情与谎言识别有着密切的联系,其公共安全、侦查讯问、临床医学等领域有很大的应用前景。针对人为识别微表情十分困难的问题,提出一种基于Horn-Schunck (HS)光流法改进并应用于微表情自动检测的方法。使用预条件Gauss-Seidel迭代方法改进了HS光流法,加快了收敛速度。通过在自发微表情数据库CASME中进行实验,该验证方法在微表情检测中有很好的效果。 关键词:微表情检测;光流法;预条件迭代 中图分类号:TP 391 DOI:10.11996/JG.j.2095-302X.2018030448 文献标识码:A 文章编号:2095-302X(2018)03-0448-05 An Improved Optical Flow Algorithm for Micro Expression Detection in the Video Sequence LI Qiuyu1, ZHANG Yuming2, YANG Fumeng3, ZHAN Shu1 (1. School of Computer and Information, Hefei University of Technology, Hefei Anhui 230009, China; 2. School of Electrical Engineering, Wuhu Institute of Technology, Wuhu Anhui 241000, China; 3. Anhui Institute of Information Technology, Wuhu Anhui 241000, China) Abstract: Micro-expression is a kind of short-duration subtle expression which is not controlled by the autonomic nervous system. Micro-expression appears when a person is attempting to conceal his true emotion. Micro-expression detection boasts great application prospects in many fields, such as public security, investigation and interrogation as well as clinical medicine due to its close relationship with lie detection. Automatic detection of micro-expressions has come to the fore in research, because it is of great difficulty to artificially identify micro-expression . This paper proposes an improved algorithm based on the Horn-Schunck (HS) optical flow for automatic micro-expression detection. In this study, the pre-conditioned Gauss-Seidel iterative method is employed to improve the HS optical flow method, which accelerates the convergence rate. Experiments in the spontaneous micro-expression database CASME show that the propounded method exerts an excellent effect on the detection of micro-expression. Keywords: micro-expression detection; optical flow; preconditioned iteration 第一作者:李秋宇(1993-),男,安徽霍邱人,硕士研究生。主要研究方向为计算机视觉、深度学习。E-mail:lqy@https://www.360docs.net/doc/2116665840.html, 通信作者:詹曙(1968-),男,安徽合肥人,教授,博士。主要研究方向为三维人脸图像分析和识别、医学影像分析和医学成像系统。 E-mail:shu_zhan@https://www.360docs.net/doc/2116665840.html, 万方数据
光流法运动目标跟踪论文
研究生课程论文 《光流法运动目标跟踪》 课程名称s 姓名 学号 专业 任课教师 教师评阅意见: 论文成绩评阅日期 课程论文提交时间:年月日
摘要本文实现了对运动目标的跟踪检测,重点研究金字塔Lucas-Kanade算法,在研究基于特征点的目标跟踪的一般方法,即采用改进的Harris角点提取点的方法。实验结果表明先采用Shi-Tomasi算法比Harris算法提取角点效果更好,之后用金字塔光流进行跟踪。 关键词运动目标跟踪Lucas-Kanade Shi-Tomasi 改进Harris 1.引言 近些年,模式识别领域的图像处理已经成为一个支柱,其中,动态目标的识别跟踪已经被研究者应用到工程上,而运动目标跟踪算法的优劣直接影响着运动目标跟踪的稳定性和精确性。本文主要是运动光流法等算法对运动目标进行跟踪。目标特征点的跟踪是计算机视觉中的一个基本而极具挑战性的研究课题,该课题在人机互动(HCI),目标识别,目标运动等领域有着非常重要的应用。虽然对运动目标跟踪算法能够完成对运动目标的可靠跟踪,大多数都存在处理数据量大,运算复杂等问题。因此,研究具有高精度且运算简单的目标检测与跟踪算法是图形跟踪迫切需要解决的问题,目前基于特征和光流的图像跟踪方法受到了极大的关注。 2.运动目标检测算法 运动目标检测技术是目标自动检测、识别与跟踪的基础,也是实现进一步处理视频编码、目标跟踪、目标分类及行为理解等的关键技术。基于视频或序列图像的分析一般可分为四个步骤:(1)运动目标的检测与提取,(2)运动目标的分类,(3)运动目标的跟踪,(4)运动目标的行为理解与分析,如图1所示。 图像序列运动检测目标分类目标跟踪行为理解 图1 分析过程 在计算机视觉处理中,运动目标检测技术处于中层处理级别,它是指在一个视频或者图像中,对需要研究的并且是处于运动状态的目标和背景进行分离,对于行为理解,行为分析等其他技术的研究,运动目标检测也是一种有效的方法。 目标检测要依据运动目标的主要特性,例如时间特性、边缘形状特性、颜色灰度特性、矢量特性等等。时间特性、区域作为视频序列时间差分和图像分割的基础,是运动目标最基本的特性。目标运动时在形状、大小、刚度等方面的差异称为形态特征,利用形态特征对运动目标检测,难点是对小目标的检测。 3.光流法 1950年,Gibuson首先提出了光流的概念,所谓光流就是指图像表现运动的速度。物体在运动的时候之所以能被人眼发现,就是因为当物理运动时,会在人的视网膜上形成一系列的连续变化的图像,这些变化信息在不同时间,不断的流过眼睛视网膜,就好像一种光流过一
光流法
光流的概念是Gibson在1950年首先提出来的。它是空间运动物体在观察成像平面上的像素运动的瞬时速度,是利用图像序列中像素在时间域上的变化以及相邻帧之间的相关性来找到上一帧跟当前帧之间存在的对应关系,从而计算出相邻帧之间物体的运动信息的一种方法。一般而言,光流是由于场景中前景目标本身的移动、相机的运动,或者两者的共同运动所产生的。其计算方法可以分为三类:(1)基于区域或者基于特征的匹配方法; (2)基于频域的方法; (3)基于梯度的方法; 简单来说,光流是空间运动物体在观测成像平面上的像素运动的“瞬时速度”。光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的“运动”。研究光流场的目的就是为了从图片序列中近似得到不能直接得到的运动场。 光流法的前提假设: (1)相邻帧之间的亮度恒定; (2)相邻视频帧的取帧时间连续,或者,相邻帧之间物体的运动比较“微小”;(3)保持空间一致性;即,同一子图像的像素点具有相同的运动 这里有两个概念需要解释: 运动场,其实就是物体在三维真实世界中的运动; 光流场,是运动场在二维图像平面上的投影。
如上图所示,H中的像素点(x,y)在I中的移动到了(x+u,y+v)的位置,偏移量为(u,v)。 光流法用于目标检测的原理:给图像中的每个像素点赋予一个速度矢量,这样就形成了一个运动矢量场。在某一特定时刻,图像上的点与三维物体上的点一一对应,这种对应关系可以通过投影来计算得到。根据各个像素点的速度矢量特征,可以对图像进行动态分析。如果图像中没有运动目标,则光流矢量在整个图像区域是连续变化的。当图像中有运动物体时,目标和背景存在着相对运动。运动物体所形成的速度矢量必然和背景的速度矢量有所不同,如
行人检测与目标跟踪算法研究
基于opencv中光流法的运动 行人目标跟踪与检测 一、课题研究背景及方法 行人检测具有极其广泛的应用:智能辅助驾驶,智能监控,行人分析以及智 能机器人等领域。从2005年以来行人检测进入了一个快速的发展阶段,但是也存在很多问题还有待解决,个人觉得主要还是在性能和速度方面还不能达到一个权衡。 早期以静态图像处理中的分割、边缘提取、运动检测等方法为主。例如 (1)以Gavrila为代表的全局模板方法:基于轮廓的分层匹配算法,构造了将近2500个轮廓模板对行人进行匹配, 从而识别出行人。为了解决模板数量众多而引起的速度下降问题,采用了由粗到细的分层搜索策略以加快搜索速度。另外,匹配的时候通过计算模板与待检测窗口的距离变换来度量两者之间的相似性。 (2)以Broggi为代表的局部模板方法:利用不同大小的二值图像模板来对人头和肩部进行建模,通过将输入图像的边缘图像与该二值模板进行比较从而识别行人,该方法被用到意大利Parma大学开发的ARGO智能车中。 (3)以Lipton为代表的光流检测方法:计算运动区域内的残余光流; (4)以Heisele为代表的运动检测方法:提取行人腿部运动特征; (5)以Wohler为代表的神经网络方法:构建一个自适应时间延迟神经网络来判断是否是人体的运动图片序列; 以上方法,存在速度慢、检测率低、误报率高的特点。 2、行人检测的研究现状
(1)基于背景建模的方法:分割出前景,提取其中的运动目标,然后进一步 提取特征,分类判别;在存在下雨、下雪、刮风、树叶晃动、灯光忽明忽暗等场 合,该方法的鲁棒性不高,抗干扰能力较差。且背景建模方法的模型过于复杂,对 参数较为敏感。 (2)基于统计学习的方法:根据大量训练样本构建行人检测分类器。提取的 特征一般有目标的灰度、边缘、纹理、形状、梯度直方图等信息,分类器包括神经 网络、SVM,adaboost等。该方法存在以下难点: (a)行人的姿态、服饰各不相同; (b)提取的特征在特征空间中的分布不够紧凑; (c)分类器的性能受训练样本的影响较大; (d)离线训练时的负样本无法涵盖所有真实应用场景的情况; 尽管基于统计学习的行人检测方法存在着诸多的缺点,但依然有很多人将注 意力集中于此。 行人检测国外研究情况: 法国研究人员Dalal在2005的CVPR发表的HOG+SVM的行人检测算法(Histograms of Oriented Gradients for Human Detection, Navneet Dalel,Bill Triggs, CVPR2005)。 Dollar 在 2010 年 BMVC 的《The fastest pedestrian detector in the west》一文中提出了一种新的思想,这种思想只需要训练一个标准 model,检测N/K(K ≈10)然后其余的 N-N/K 种大小的图片的特征不需要再进行这种复杂的计算,而是跟据这 N/K 次的结果,由另外一种简单的算法给估计出来,这种思 想实现的基础是大小相近的图像的特征可以被足够精确的估计出来;同年,德国
光流法
光流法 光流是一种简单实用的图像运动的表达方式,通常定义为一个图像序列中的图像亮度模式的表观运动,即空间物体表面上的点的运动速度在视觉传感器的成像平面上的表达。 中文名:光流法属于:简单实用的图像运动 表示:一种几何变化分为:匹配的方法频域的方法梯度的方法 人类主要通过眼睛,耳朵和大脑来获取、处理与理解获得的信息。然而图像具有最直观、明了、让人一看就懂的特质,因为人们获取信息70%以上依靠视觉,20%左右依靠听觉,10%左右依靠触觉和嗅觉,这就是为什么“百闻不如一见”,一幅图像说明一切问题,胜过千言万语。 计算机视觉这一领域的先驱可追溯到很早的时候,但是直到20世纪70年代后期,当计算机的性能提高到足以处理诸如图像这样的大规模数据时,计算机视觉才得到了正式的关注和发展。计算机视觉就是用各种成象系统代替视觉器官作为输入敏感手段,由计算机来代替大脑完成处理和解释,也包括对视觉信息的采集,传输,处理,存储与理解等过程。计算机视觉最终研究目标就是使计算机能像人那样通过视觉观察和理解世界,具有自主适应环境的能力,要经过长期的努力才能达到的目标。因此,在实现最终目标以前,人们努力的中期目标是建立一种视觉系统,这个系统能依据视觉敏感和反馈的某种程度的智能完成一定的任务。计算机视觉应用领域较广泛,包括航空航天、卫星照片、军事导弹精确制导、移动机器人视觉导航、工业自动化系统、医学辅助诊断等。 计算机视觉系统的结构形式很大程度上依赖于其具体应用方向。有些是独立工作的,用于解决具体的测量或检测问题,也有些作为某个大型复杂系统的组成部分出现,比如工业控制系统,汽车导航系统。计算机视觉系统的具体实现方法同时也由其功能决定,有些是预先固定的,有些是在运行过程中自动学习调整。尽管如此,以下几个功能却几乎是每个计算机系统都需要具备的。 图像获取,一幅数字图像是由一个或多个图像感知器产生的,例如摄像机,红外遥感摄像仪,雷达,超声波接收器等,所产生的图片包括二维图像,三维图像或者一个图像序列。 预处理,在对图像实施具体的计算机视觉方法来提取某种特定的信息前,首先通过一种或一些方法预先对图像进行处理,以满足后继图像处理的要求,包括二次取样,平滑去噪,提高对比度等。 特征提取,是使用计算机提取图像信息,检查每个像素确定该像素是否代表一个特征,例如边缘提取,边角检验,斑点检验。图像分割,对图像进行分割来提取有价值的信息用于后继处理的部分。 光流法的基本原理
LK光流算法
光流的概念是Gibson于1950年首先提出的。所谓光流是指图像中模式运动的速 。1981年,Horn等人在相邻图像间的时间间隔很小,并且图像灰度变化也很小的 提下,推导出灰度图像光流场计算的基本等式,这是经典光流方法[18,24]。 光流的算法多种多样,其用于目标跟踪常用的算法有:检测和跟踪特征点[25]、跟 好的特征点[26]、金字塔图像的Lucas Kanade特征点跟踪算法(因为其跟踪过程是迭 的光流法计算过程,因此,为了更好的体现光流的作用,本文将其简称为:Lucas nad光流法)[27]。在这三种光流跟踪方法中,跟踪性能最优的是Lucas Kanade光流 –26–第四章目标跟踪 法,由于该算法仅跟踪少量的特征点、迭代法收敛速度也很快而且算法的计算量不大, 已被广泛的应用于运动车辆跟踪和人脸特征点跟踪[47,48];下面介绍文献[27],并对其 进行相关实验。 §4.3.1问题提出 用I和J来代表两个灰度图像。那么I(x)=I(x,y)和J(x)=J(x,y)代表了这两个灰度图 像在点X=[x,y]T的灰度值,x和y是图像的点X坐标。称图像I为第一幅图像,称J为 第二幅图像。从实际的图像来说,I和J是两个离散的函数,并且左上角的像素点坐标 是[0,0]T。用nx和ny表示图像的宽度和高度,右下端图像的坐标是[nx?1,ny?1]T。 考虑第一幅图像I(X)=I(x,y)上的一点,跟踪的目的就是在第二幅图像J(X)= J(x,y)上找到与之相对应的一点,d=[d x ,d y ] T 是在点X处图像的速度,即点X处图像的 光流。令ωx和ωy表示两个整数,假定图像速度d是使得下面的残差函数ε最小的函数:ε(d)=ε(dx,dy)= ux+ωx x=ux?ωx uy+ωy y=uy?ωy (I(x,y)?J(x+dx,y+dy)) 2 (4-3-5) 根据上面的定义,相似度的函数被在(2ωx+1,2ωy+1)的区域内定义。这个区域也 称之为积分窗口。典型的ωx、ωy是2、3、4、5、6、7个像素。 §4.3.2跟踪算法描述 基于特征点的跟踪的两个关键问题是准确度和鲁棒性。准确度是从直觉上来说, 为了不抹去图像中的细节,需要小的积分窗口。鲁棒性因素需要考虑光照变化,图像 运动时对尺寸变化的敏感性。特别的,为了了解大矢量运动的问题需要一个大的积分 窗口。实际上,仅仅考虑等式(4-3-5),理想的情况是dx<ωx,dy<ωy。这样我们就必 须兼顾准确度和鲁棒性来选择积分窗口。为了更好的解决这个问题,采用了基于金字 塔图像的光流跟踪方法。这个方法对局部跟踪的准确性提出了一个很好的解决方案。 一、金字塔图像表示 描述一个nx×ny的图像I,令I0=I表示第0层图像(原始图像),那么金字塔图
全局运动多分辨率光流估计算法的改进与实现_韩军
文章编号:1673-9965(2011)02-115-05 全局运动多分辨率光流估计算法的改进与实现* 韩军,张东 (西安工业大学光电工程学院,西安710032) 摘要:为了提高低分辨率图像之间的位移估计精度,在传统光流算法的基础上,提出了全局运动的多分辨率光流估计算法.实验结果表明:该算法能够快速实现小位移和准确的实现大位移的运动估计,通过对互有亚像素位移的多帧低分辨率图像对比相位相关法进行运动估计,改进的多分辨率光流估计算法实现的高精度亚像素位移误差精度为0.05pi. 关键词:光流估计算法;多分辨率;亚像素估计;相位相关法 中图号:T P391.4文献标志码:A 图像超分辨率重构技术是提高现有光电观瞄系统的探测距离和分辨率的重要方法,近年来是研究的热门课题[1].为了重建高分辨率图像,首先必须确定所有低分辨率图像间的运动信息,然后将它们配准到同一个参考帧上.在很多其他应用中,这些运动参数是事先不可知的,因此运动估计是超分辨率重建算法中非常关键的步骤,而且估计的准确性比其密集性更重要,如果估计精度达不到亚像素级,将会极大地影响重建图像的质量[2]. 现有运动补偿和运动估计的算法很多,主要如基于插值的算法、基于抛物面预测算法、基于频率域方法的相位相关法等[3-4].通过插值算法达到亚像素的精度是运用最为广泛的方法,但其随着精度的提高,运算的复杂性大大提高.另一类亚像素运动估计方法是基于抛物面预测的亚像素运动估计算法,这类方法虽然所需时间少,但是由于最佳亚像素点周围的实际函数并不是和预测的函数完全一致,会导致最佳运动矢量与实际选取的运动矢量之间的误差. 光流估计算法是运动估计中的重要算法之一[5].光流是空间运动物体在观测成像面上的象素运动的瞬时速度;光流场是指图像灰度模式的表面运动.光流的研究是利用图像序列中的像素强度数据的时域变化和相关性来确定各自像素位置的运动.研究光流场的目的就是为了从序列图像中近似计算出不能直接得到的运动场[7-8].文中改进了基于全局运动多分辨率的光流估计方法,将待估计图像降采样形成分辨率逐步降低的图像集合,对其由低到高逐级进行光流法运动估计.并通过实验证明了多分辨率的光流估计方法提高了估计的精确性. 1传统的光流估算方法 光流场的计算最初是由H orn和Schunck提出[7].如果t时刻图像的点(x,y)处灰度值为I(x, y,t),在时刻t+$t时,这一点运动到((x+$x,y+ $y,t+$t),对应的灰度值为I(x+$x,y+$y,t+ $t),假定它与I(x,y,t)相等,即 I(x+$x,y+$y,t+$t)=I(x,y,t)(1) 利用泰勒公式对其展开,忽略二阶及其以上的项可得到 5I 5x $x $t+ 5I 5y $y $t+ 5I 5t=0(2)令u,v分别为该点光流矢量沿x和y方向的两个分量,且有 u=d x d t ,v=d y d t 则可得到基本光流约束方程 I x u+I y v+I t=0(3) 第31卷第2期2011年04月 西安工业大学学报 Jour nal of X i.an T echno log ical U niversity V ol.31N o.2 A pr.2011 *收稿日期:2010-11-23 作者简介:韩军(1966-),男,西安工业大学教授,主要研究方向为光电测试技术、光学薄膜.E-mail:hanjun512@https://www.360docs.net/doc/2116665840.html,.
光流法
基于前—后向光流点匹配运动熵的视频抖动检测算法 1问题描述 本文主要研究的是视频监控诊断系统中的视频画面抖动检测问题。正常情况下,运动图像序列的连续多帧之间过渡是平滑的,画面相关性比较连续,但是如果它们之间的相关性出现大波动,视频就会出现抖动的情况。在视频监控中,摄像头一般都是固定在某个位置,因此造成视频画面抖动现象的原因主要有: 1)摄像头受到环境的干扰( 比如强风) 发生有规律的摆动从而造成图像的上下或左右抖动; 2) 摄像头正在被人移动,造成画面抖动。任何一种情况,都会导致画面出现周期性振颤或不规则扭曲,都意味着摄像头工作出现了异常。 2问题分析 常见的运动参数估计算法主要有灰度投影法、块匹配法、特征点匹配和光流法。针对视频监控画面抖动检测问题,本文提出一种实时有效、具有较高精度的检测算法。算法采用稀疏型的光流特征和ORB 特征点匹配相融合的策略,采用前向—后向误差作为检验标准过滤错误匹配的光流点,然后根据正确匹配的点集合估计视频帧之间的全局运动方向和幅度等参数。在一个时间段内,利用运动熵衡量连续帧的运动混乱程度,判断视频画面是否发生抖动异常现象。 本文针对视频质量诊断的抖动异常检测问题:1)提出融合光流点与特征点匹配,利用前-后向误差的方式验证并获取有效匹配点集的策略,可以缓解大位移抖动的影响,增强匹配点的可靠性;2)引入运动熵衡量连续帧间运动一致性程度,用于判断是否发生抖动,方法简单有效,实际可操作性比较好。最后面向实际应用,搜集了各种在实际中发生抖动异常的视频监控录像数据,在数据集上测试了本文算法的
性能,并进行了比较。实验证明,本文算法达到了实时性要求,具备较高的检测精度,能够满足现实监控系统视频质量诊断的工作要求。 3算法描述 视频发生抖动,意味着整个画面都将发生运动,同一帧画面上的点总体运动趋势保持一致。基于这个假设前提,可以通过计算画面的全局运动参数来估计画面的整体运动情况。鉴于光流特征能够较好地反映视频画面丰富的运动信息,特征点匹配对于环境适应性较好,本文提出将稀疏型光流特征与特征点匹配相融合的策略用于估计运动过程参数,有效互补它们各自的优点。 在视频的整个画面空间上进行快速Harris 角点检测,将画面均匀划分成若干栅格区域( 如3* 3的划分),然后在每个栅格区域随机选取若干个角点,形成均匀分布于画面空间的角点点集,计算它们的光流特征。由于采样的点数远小于图像的像素个数,其稀疏型光流特征的计算量将大大降低。根据光流特征,可以粗略估计当前点在下一帧的大致位置。为了避免光流受大位移抖动的影响,减少匹配误差,算法在光流点估计位置的局部邻域范围内进行特征点匹配,一方面可以利用特征点匹配的良好适应性,同时可以避免特征点全局画面匹配的计算量。最后算法根据前-后向误差的标准,选取更为可靠的匹配点对估计全局运动参数。
采用光流估计的数字相机自动对焦算法
采用光流估计的数字相机自动对焦算法 郭惠楠1,曹剑中1,周祚峰1,董小坤1,刘庆,马楠2 (1.中国科学院西安光学精密机械研究所,陕西西安710119; 2.空军工程大学理学院,陕西西安710051) 摘要:自动对焦技术对于数字相机至关重要,它是获取清晰图像的重要手段。针对复杂环境下多目标场景图像,提出了一种基于光流场估计的自动对焦算法。通过计算输入图像序列的光流场,对场景中的运动目标进行检测,根据目标运动属性准确判断出感兴趣目标。改进了Brenner 清晰度评价方法,利用目标的二维边缘梯度信息建立评价函数,并且通过非线性增益提高评价函数的灵敏度,减小了噪声对评价值的影响。实验证明,该算法能够在主辅目标景深比达50倍的情况下分辨出感兴趣主目标,并在方差为0.02的随机噪声干扰下能有效地评价图像的清晰度;此算法将Brenner 等评价函数的峰值稳定余量提高了1至4倍,对于不同图像具有良好的鲁棒性,易于硬件实现。关键词:光学工程;自动对焦;光流;清晰度评价;数字相机 中图分类号:TP391.9文献标志码:A 文章编号:1007-2276(2013)12-3417-06Auto 鄄focus algorithm of digital camera based on optical flow estimation Guo Huinan 1,Cao Jianzhong 1,Zhou Zuofeng 1,Dong Xiaokun 1,Liu Qing 1,Ma Nan 2 (Xi ′an Institute of Optics and Precision Mechanics,Chinese Academy of Sciences,Xi ′an 710119,China; 2.College of Science,Air Force University of Engineering,Xi ′an 710051,China) Abstract:Auto 鄄Focus technique is a main approach to hunt clear images which plays an important role in digital camera application.According to several unknown target under complicated condition,a novel auto 鄄focus algorithm was proposed based on optical flow estimation.By calculating the optical flow of each input frame,the moving targets in scene image were tested as well as according to the moving characteristic,the interested real target was judged.Brenner sharpness evaluation method was improved.Meanwhile the evaluation function was established using two dimensions edge 鄄gradient information.The response sensitivity of evaluation function was also increased via nonlinear 鄄gain coefficient the impact of noise on evaluation value was decreased.Experimental results show that the proposed method can distinguish the interested main target in 50times depths of field of different targets and evaluate the definition of varied images with random noise in 0.02variance value effectively.And it is of a good ability of robustness for different images,Brenner function improves the peak stability margin 1to 4收稿日期:2013-04-12;修订日期:2013-05-20 基金项目:国家自然科学基金(61201376) 作者简介:郭惠楠(1985-),男,博士生,主要从事图像与视频信息处理方面的研究。Email:s09068@https://www.360docs.net/doc/2116665840.html, 导师简介:曹剑中(1969-),男,研究员,博士生导师,主要从事航空相机成像系统方面的研究。Email:cjz@https://www.360docs.net/doc/2116665840.html, 第42卷第12期 红外与激光工程2013年12月Vol.42No.12Infrared and Laser Engineering Dec .2013