发那科fanuc维修手册-内部资料
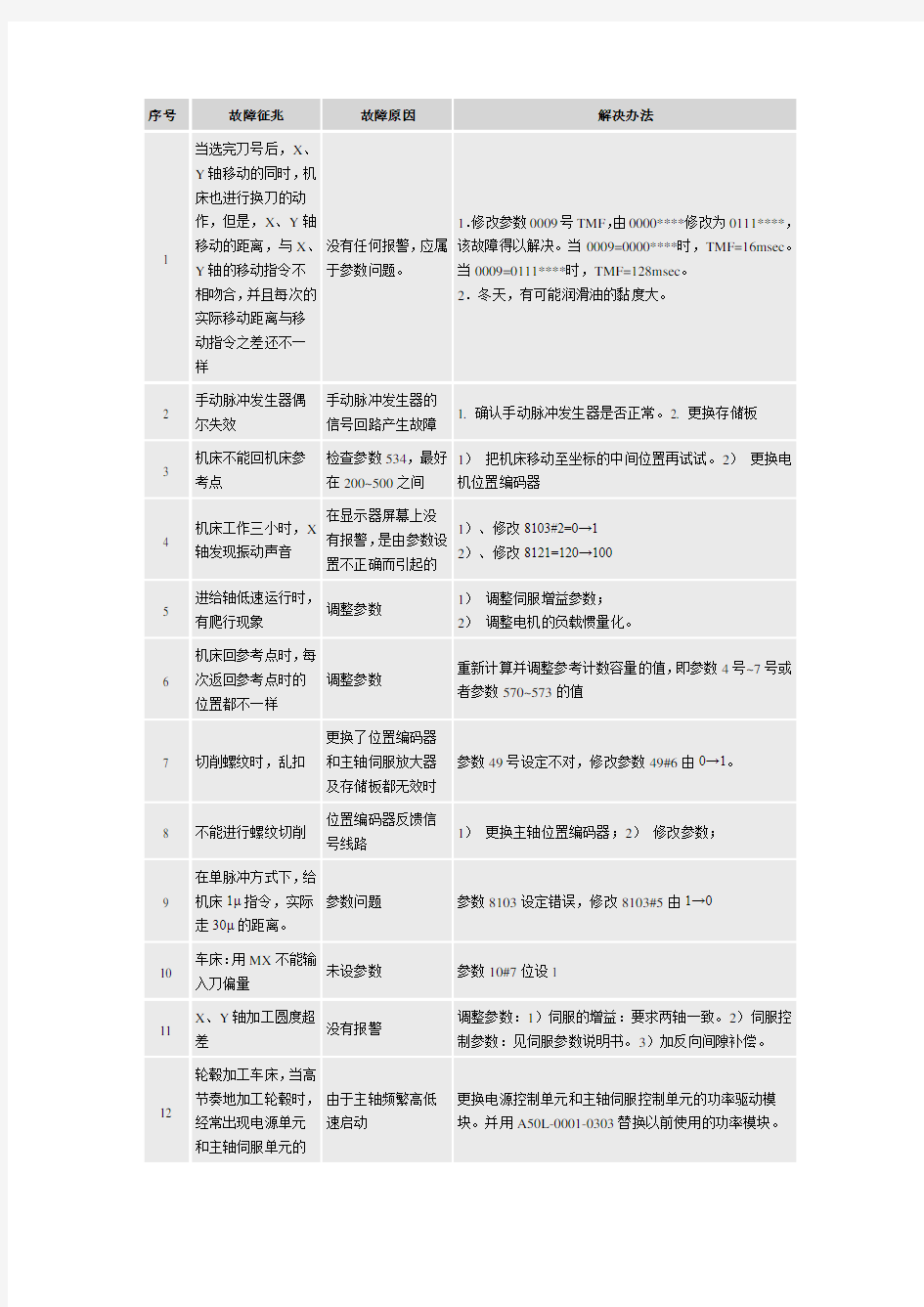
序号故障征兆故障原因解决办法
1 当选完刀号后,X、
Y轴移动的同时,机
床也进行换刀的动
作,但是,X、Y轴
移动的距离,与X、
Y轴的移动指令不
相吻合,并且每次的
实际移动距离与移
动指令之差还不一
样
没有任何报警,应属
于参数问题。
1.修改参数0009号TMF,由0000****修改为0111****,
该故障得以解决。当0009=0000****时,TMF=16msec。
当0009=0111****时,TMF=128msec。
2.冬天,有可能润滑油的黏度大。
2 手动脉冲发生器偶
尔失效
手动脉冲发生器的
信号回路产生故障
1. 确认手动脉冲发生器是否正常。
2. 更换存储板
3 机床不能回机床参
考点
检查参数534,最好
在200~500之间
1)把机床移动至坐标的中间位置再试试。2)更换电
机位置编码器
4 机床工作三小时,X
轴发现振动声音
在显示器屏幕上没
有报警,是由参数设
置不正确而引起的
1)、修改8103#2=0→1
2)、修改8121=120→100
5 进给轴低速运行时,
有爬行现象
调整参数
1)调整伺服增益参数;
2)调整电机的负载惯量化。
6 机床回参考点时,每
次返回参考点时的
位置都不一样
调整参数
重新计算并调整参考计数容量的值,即参数4号~7号或
者参数570~573的值
7 切削螺纹时,乱扣更换了位置编码器
和主轴伺服放大器
及存储板都无效时
参数49号设定不对,修改参数49#6由0→1。
8 不能进行螺纹切削位置编码器反馈信
号线路
1)更换主轴位置编码器;2)修改参数;
9 在单脉冲方式下,给
机床1μ指令,实际
走30μ的距离。
参数问题参数8103设定错误,修改8103#5由1→0
10 车床:用MX不能输
入刀偏量
未设参数参数10#7位设1
11 X、Y轴加工圆度超
差
没有报警
调整参数:1)伺服的增益:要求两轴一致。2)伺服控
制参数:见伺服参数说明书。3)加反向间隙补偿。
12 轮毂加工车床,当高
节奏地加工轮毂时,
经常出现电源单元
和主轴伺服单元的
由于主轴频繁高低
速启动
更换电源控制单元和主轴伺服控制单元的功率驱动模
块。并用A50L-0001-0303替换以前使用的功率模块。
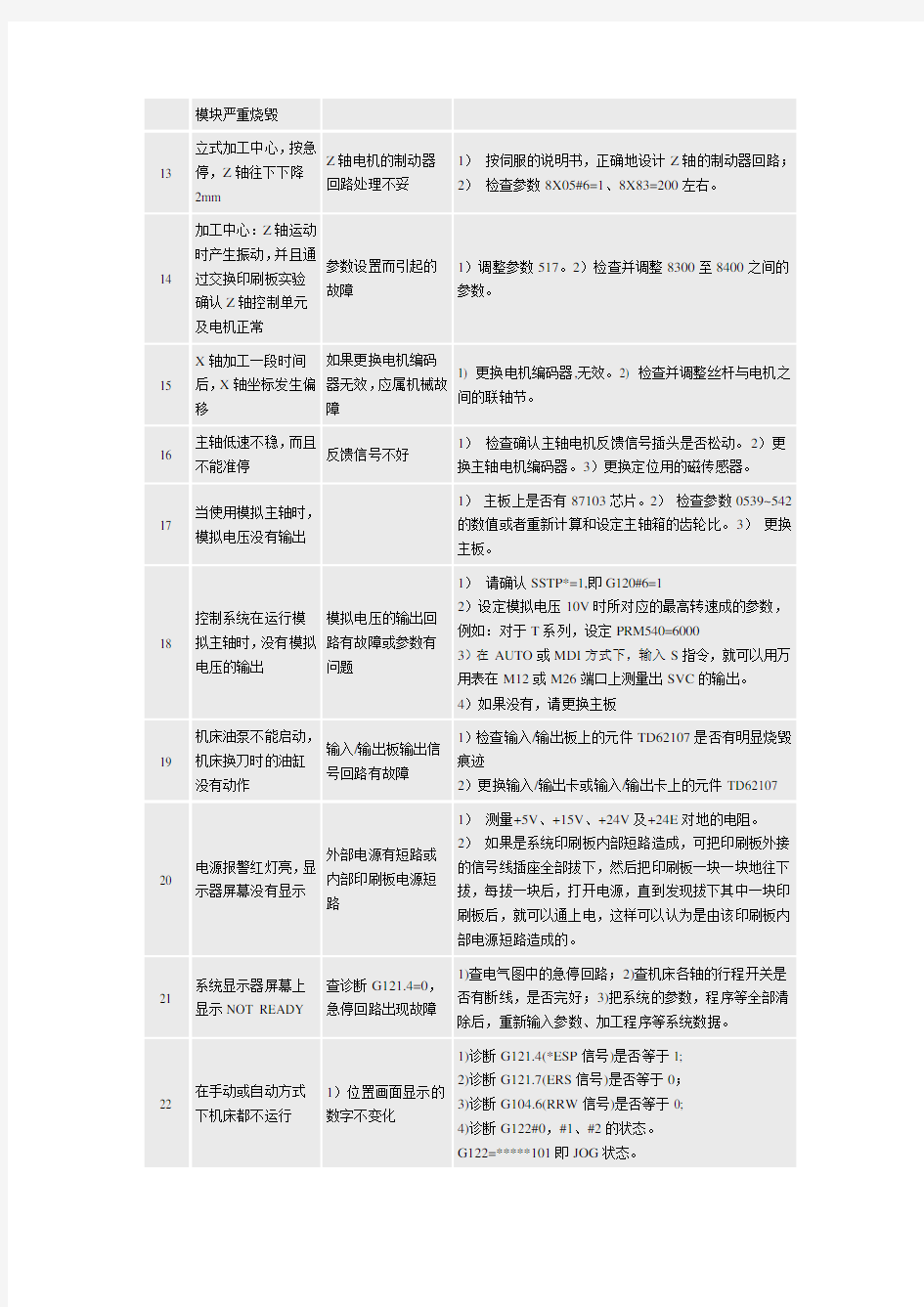
模块严重烧毁
13 立式加工中心,按急
停,Z轴往下下降
2mm
Z轴电机的制动器
回路处理不妥
1)按伺服的说明书,正确地设计Z轴的制动器回路;
2)检查参数8X05#6=1、8X83=200左右。
14 加工中心:Z轴运动
时产生振动,并且通
过交换印刷板实验
确认Z轴控制单元
及电机正常
参数设置而引起的
故障
1)调整参数517。2)检查并调整8300至8400之间的
参数。
15 X轴加工一段时间
后,X轴坐标发生偏
移
如果更换电机编码
器无效,应属机械故
障
1) 更换电机编码器,无效。2) 检查并调整丝杆与电机之
间的联轴节。
16 主轴低速不稳,而且
不能准停
反馈信号不好
1)检查确认主轴电机反馈信号插头是否松动。2)更
换主轴电机编码器。3)更换定位用的磁传感器。
17 当使用模拟主轴时,
模拟电压没有输出
1)主板上是否有87103芯片。2)检查参数0539~542
的数值或者重新计算和设定主轴箱的齿轮比。3)更换
主板。
18 控制系统在运行模
拟主轴时,没有模拟
电压的输出
模拟电压的输出回
路有故障或参数有
问题
1)请确认SSTP*=1,即G120#6=1
2)设定模拟电压10V时所对应的最高转速成的参数,
例如:对于T系列,设定PRM540=6000
3)在AUTO或MDI方式下,输入S指令,就可以用万
用表在M12或M26端口上测量出SVC的输出。
4)如果没有,请更换主板
19 机床油泵不能启动,
机床换刀时的油缸
没有动作
输入/输出板输出信
号回路有故障
1)检查输入/输出板上的元件TD62107是否有明显烧毁
痕迹
2)更换输入/输出卡或输入/输出卡上的元件TD62107
20 电源报警红灯亮,显
示器屏幕没有显示
外部电源有短路或
内部印刷板电源短
路
1)测量+5V、+15V、+24V及+24E对地的电阻。
2)如果是系统印刷板内部短路造成,可把印刷板外接
的信号线插座全部拔下,然后把印刷板一块一块地往下
拔,每拔一块后,打开电源,直到发现拔下其中一块印
刷板后,就可以通上电,这样可以认为是由该印刷板内
部电源短路造成的。
21 系统显示器屏幕上
显示NOT READY
查诊断G121.4=0,
急停回路出现故障
1)查电气图中的急停回路;2)查机床各轴的行程开关是
否有断线,是否完好;3)把系统的参数,程序等全部清
除后,重新输入参数、加工程序等系统数据。
22 在手动或自动方式
下机床都不运行
1)位置画面显示的
数字不变化
1)诊断G121.4(*ESP信号)是否等于1;
2)诊断G121.7(ERS信号)是否等于0;
3)诊断G104.6(RRW信号)是否等于0;
4)诊断G122#0,#1、#2的状态。
G122=*****101即JOG状态。
FANUC+维修培训系列资料6参数详解.pdf
第六讲参数详解 参数在NC系统中用于设定NC数控机床及辅助设备的规格和内容,以及加工操作中所必须的一些数据。机床厂家在制造机床、最终用户在使用的过程中,通过参数的设定,来实现对伺服驱动、加工条件、机床坐标、操作功能、数据传输等方面的设定和调用。 FANUC 0i-MA系统,也有参数设置的功能来与其强大的功能相对应。如果参数设定错误,将对机床和NC系统产生不良的影响,故在更改参数之前,一定要清楚地了解该参数的意义及其对应的功能。下面我们来了解一下参数的使用事项。 第一节参数的基础知识介绍 一、参数画面的显示和调出 在了解各个参数的定义和设定之前,必须学会如何调出参数画面。参数的调出步骤如下: 1、按MDI面板上的功能键一次或几次后,再按软键[参数]来选择参数画面。 如图6-1所示。 图6-1 2、参数画面有多页组成,可以用以下两种方法来显示所需参数的画面。 ①用翻页键或光标移动键,显示所要查找的参数画面; ②在MDI键盘上输入参数号,然后按软键[NO检索](如图6-2)。这样可以快速找到 所要参数的画面。 二、参数的分类
1、FANUC 0i-MA 数控系统的参数按照数据形式大致可分为位型和字型。其中位型又分位和位轴型,字型又分字节型、字节轴型、字型、字轴型、双字型、双字轴型8种。轴型参数允许参数分别设定给各个控制轴。 位型参数是指对该参数的0至7这八位单独设置“0”或“1”的数据,位型参数的格式如图6-2所示。 图6-2 不同数据类型的数据有效输入范围如下表所示。 数据类型 数据的有效输入范围 备注 位型 位轴型 0或1 字节型 字节轴型 -128~127 0~255 有部分参数不使用符号 字型 字轴型 -32768~32767 0~65535 有部分参数不使用 符号 双字型 双字轴型 -99999999~99999999 字型参数在参数画面的显示,如图6-3示。 图6-3 2、按照设定对象的不同,可以细分为49个类别,具体如下表。 参数类别 参数号范围 “SETTING ”的参数 0000~0020 RS-232-C 串口与I/O 设备进行数据传输的参数 0100~0123 > L 0%MDI *** *** *** 08:36:45 [ NO 检索 ] [ 接通:1] [ 断开:0 ] [ +输入 ] 输入 S O [] 参数 (STROKE LIMIT ) 0002 N00000 01320 LI MI T 1+ X 5000 Y 5000 Z 50001321 LI MI T 1- X -800000 Y -500000 Z -550000
FANUC维护保养
机器人维护与保养 定期保养机器人可以延长机器人的使用寿命,FANUC机器人的保养周期可以分为日常三个月,六个月,一年,三年。具体内容如下: 在这里具体描述如何更换电池和润滑油。 更换电池 FANUC机器人系统在保养当中需要更换两种电池:更换控制器主板上的电池和机器人本体上的电池。 1.更换控制器主板上的电池 程序和系统变量存储在主板上的SRAM中,由一节位于主板上的锂电池供电,以保存数据。当这节电池的电压不足时,则会在TP上显示报警(SYST-035 Low or No Battery Power in PSU)。当电压变得更低时,SRAM中的内容将不能备份,这时需要更换旧电池,并将原先备份的数据重新加载。因此,平时注意用Memory Card或软盘定期备份数据。控制器主板上的电池两年换一次,具体步骤如下:
1) 准备一节新的锂电池(推荐使用FANUC原装电池)。 2)机器人通电开机正常后,等待30秒。 3)机器人关电,打开控制器柜子,拔下接头取下主板上的旧电池。 4)装上新电池,插好接头 2.更换机器人本体上的电池 机器人本体上的电池用来保存每根轴编码器的数据。因此电池需要每年都更换,在电池电压下降报警(SRVO-065 BLAL alarm(Group: %d Axis: %d)出现时,允许用户更换电池。若不及时更换,则会出现报警(SRVO-062 BZAL alarm(Group: %d Axis: %d),此时机器人将不能动作,遇到这种情况再更换电池,还需要做Mastering,才能使机器人正常运行。 具体步骤如下: 1)保持机器人电源开启,按下机器急停按钮。 2)打开电池盒的盖子,拿出旧电池。 3)换上新电池(推荐使用FANUC原装电池),注意不要装错正负极(电池盒的盖子上有标识)。 4)盖好电池盒的盖子,上好螺丝。 更换润滑油 机器人每工作三年或工作10000小时,需要更换J1,J2,J3、J4、J5、J6轴减速器润滑油和J4轴齿轮盒的润滑油。某些型号机器人如S-430、R-2000等每半年或工作1920小时还需更换平衡块轴承的润滑油。 1.更换减速器和齿轮盒润滑油 具体步骤如下: 1)机器人关电。 2)拔掉出油口塞子。 3)从进油口处加入润滑油,直到出油口处有新的润滑油流出时,停止加油。 4)让机器人被加油的轴反复转动,动作一段时间,直到没有油从出油口处流出。 5)把出油口的塞子重新装好。 注意:错误的操作将会导致密封圈损坏,为避免发生错误,操作人员应考虑以下几点:1)更换润滑油之前,要将出油口塞子拔掉。 2)使用手动油枪缓慢加入。 3)避免使用工厂提供的压缩空气作为油枪的动力源,如果非要不可,压力必须控制在75Kgf/cm2 以内,流量必须控制在15/ss以内。 4)必须使用规定的润滑油,其他润滑油会损坏减速器。 5)更换完成,确认没有润滑油从出油口流出,将出油口塞子装好。 6)为了防止滑倒事故的发生,将机器人和地板上的油迹彻底清除干净。 2.更换平衡块轴承润滑油 操作步骤: 直接从加油嘴处加入润滑油,每次无须太多(约10CC)。 至于需要更换润滑油的数量和加油口/出油口的位置参见随机的机械保养手册。 注意:更换电池和润滑油由专业技术人员操作必须更换原装电池和润滑油否则后果自负
发那科fanuc维修手册-内部资料
序号故障征兆故障原因解决办法 1 当选完刀号后,X、 Y轴移动的同时,机 床也进行换刀的动 作,但是,X、Y轴 移动的距离,与X、 Y轴的移动指令不 相吻合,并且每次的 实际移动距离与移 动指令之差还不一 样 没有任何报警,应属 于参数问题。 1.修改参数0009号TMF,由0000****修改为0111****, 该故障得以解决。当0009=0000****时,TMF=16msec。 当0009=0111****时,TMF=128msec。 2.冬天,有可能润滑油的黏度大。 2 手动脉冲发生器偶 尔失效 手动脉冲发生器的 信号回路产生故障 1. 确认手动脉冲发生器是否正常。 2. 更换存储板 3 机床不能回机床参 考点 检查参数534,最好 在200~500之间 1)把机床移动至坐标的中间位置再试试。2)更换电 机位置编码器 4 机床工作三小时,X 轴发现振动声音 在显示器屏幕上没 有报警,是由参数设 置不正确而引起的 1)、修改8103#2=0→1 2)、修改8121=120→100 5 进给轴低速运行时, 有爬行现象 调整参数 1)调整伺服增益参数; 2)调整电机的负载惯量化。 6 机床回参考点时,每 次返回参考点时的 位置都不一样 调整参数 重新计算并调整参考计数容量的值,即参数4号~7号或 者参数570~573的值 7 切削螺纹时,乱扣更换了位置编码器 和主轴伺服放大器 及存储板都无效时 参数49号设定不对,修改参数49#6由0→1。 8 不能进行螺纹切削位置编码器反馈信 号线路 1)更换主轴位置编码器;2)修改参数; 9 在单脉冲方式下,给 机床1μ指令,实际 走30μ的距离。 参数问题参数8103设定错误,修改8103#5由1→0 10 车床:用MX不能输 入刀偏量 未设参数参数10#7位设1 11 X、Y轴加工圆度超 差 没有报警 调整参数:1)伺服的增益:要求两轴一致。2)伺服控 制参数:见伺服参数说明书。3)加反向间隙补偿。 12 轮毂加工车床,当高 节奏地加工轮毂时, 经常出现电源单元 和主轴伺服单元的 由于主轴频繁高低 速启动 更换电源控制单元和主轴伺服控制单元的功率驱动模 块。并用A50L-0001-0303替换以前使用的功率模块。
FANUC机器人操作说明书
< > R-0+B 机构部 操作说明书 B-83624CM/01
在使用机器人之前,务须仔细阅读“FANUC Robot安全手册(B-80687EN)”,并在理解该内容的基础上使用机器人。 y本说明书的任何内容不得以任何方式复制。 y本机的外观及规格如需改良而变更,恕不另行通知。 本说明书中所载的产品,受到日本国《外汇和外国贸易法》的限制。从日本将这些出口到其他国家时,必须获得日本国政府的出口许可。 另外,将该产品再出口到其他国家时,应获得再出口该产品的国家的政府许可。此外,该产品可能还受到美国政府的再出口法的限制。 若要出口或者再出口此类产品,请向FANUC公司洽询。 我们试图在本说明书中描述尽可能多的情况。 然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。 因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-83624CM/01为了安全使用 为了安全使用 感谢贵公司此次购买FANUC(发那科)机器人。 本章说明为安全使用机器人而需要遵守的内容。 在使用机器人之前,务必熟读并理解本章中所载的内容。 有关操作机器人时的详细功能,请用户通过说明书充分理解其规格。 如果说明书与本章存在差异,应以本章为准。 在使用机器人和外围设备及其组合的机器人系统时,必须充分考虑作业人员和系统的安全预防措施。有关安全使用发那科机器人的注意事项,归纳在“FANUC Robot Safety Manual (B-80687EN)”中,可同时参阅该手册。 1 作业人员的定义 机器人作业人员的定义如下所示。 -操作者 进行机器人的电源ON/OFF操作。 从操作面板启动机器人程序。 -程序员 进行机器人的操作。 在安全栅栏内进行机器人的示教等。 -维修工程师 进行机器人的操作。 在安全栅栏内进行机器人的示教等。 进行机器人的维护(修理、调整、更换)作业。 “操作者”不能在安全栅栏内进行作业。 “程序员”、“维修工程师”可以在安全栅栏内进行作业。 安全栅栏内的作业,包括搬运、设置、示教、调整、维护等。 要在安全栅栏内进行作业,必须接受过机器人的专业培训。 在进行机器人的操作、编程、维护时,操作者、程序员、维修工程师必须注意安全,至少应穿戴下列物品进行作业。 - 适合于作业内容的工作服 - 安全鞋 - 安全帽 2 警告、注意和注释 本说明书包括保证操作者人身安全以及防止机床损坏的有关安全的注意事项,并根据它们在安全方面的重要程度,在正文中以“警告”和“注意”来叙述。 有关的补充说明以“注释”来描述。 用户在使用之前,必须熟读这些“警告”、“注意”和“注释”中所叙述的事项。 注释 指出除警告和注意以外的补充说明。
FANUC βi 系列维修说明书_部分3解析
B-65325CM/01 - 19 - 伺服放大器的定期维护 B-65325CM/01 - 20 - 5.1 绝对脉冲编码器用电池 绝对脉冲编码器用电池内一共有 [连接方式 1]和 [连接方式 2] 两种连接方式。[连接方式 1] 从 1台电池向多台 SVM APC (绝对脉冲编码器报警电池下降,或者电池电压为零时请更换电池。 另外,电池电压为零时,必须进行参考点返回操作。 βi S系列伺服电机(β0.4/5000i S ~β22/2000i S 按照标准在绝对脉冲编码
器内装有备用电容器。并且, 由于可持续 10分钟左右的绝对位置检测运行, 所以在该时间内,即使切断伺服放大器电源更换电池时,也不需要进行参考点返回操作。 另一方面,使用β系列伺服电机和部分βi S系列伺服电机(β0.2/5000i S ~β0.3/5000i S 时,由于脉冲编码器内没有安装内置备用电容器,此时必须引起操作着的高度重视。详情请参阅项目末尾的 [更换电池时的注意事项 NO.1]。 电池寿命在伺服电机 6轴连接时以及βi S系列伺服电机(β0.4/5000i S ~β 22/2000i S 时大约为 2年,使用β系列伺服电机和部分βi S系列伺服电机 (β0.2/5000i S ~β0.3/5000i S 时大约为 1年左右。因此,应当根据电池的寿命定期更换电池。 电池为1号碱性干电池(4节。并且可使用市面出售的电池。 B-65325CM/01
- 21 - [连接方式 2] 内置电池在各 SVM 内的安装方法 APC (绝对脉冲编码器报警器电池容量降低或者电池电压为零时,请更 换电池 (A06B-6093-K001。 另外,电池电压为零时,必须进行参考点返回操作。 βi S系列伺服电机(β0.4/5000i S ~β22/2000i S 按照标准在绝对脉冲编码 器内装有备用电容器。并且, 由于可持续 10分钟左右的绝对位置检测运行, 所以在该时间内,即使切断伺服放大器电源更换电池时,也不需要进行参考点返回操作。 另一方面,使用β系列伺服电机和部分βi S系列伺服电机(β0.2/5000i S ~β0.3/5000i S 时,由于脉冲编码器内没有安装内置备用电容器,此时必须引起操作者的高度重视。详情请参阅项目末尾的 [更换电池时的注意事项 NO.1]。 电池寿命在βi S系列伺服电机(β0.4/5000i S ~β22/2000i S 时为 2年,使 用β系列伺服电机和部分βi S系列伺服电机(β0.2/5000i S ~β0.3/5000i S 时大约为 1年左右。因此,应当根据电池的寿命定期更换电池。内置电池为非市场购买产品,因此,必须向我公司购买。因此,建议用户 事先准备好备用的内置电池。 B-65325CM/01
fanuc 几个维修修改参数
fanuc 维修中常用的参数-大家一起补充啊 FANUC系统有很丰富的机床参数,为数控机床的安装调试及日常维护带来了方便条件。根据多年的实践,对常用的机床参数在维修中的做了些归纳,大家一起添些,先扔块砖 1.手摇脉冲发生器损坏。一台FANUC 0TD数控车床,手摇脉冲发生器出现故障,使对刀不能进行微调,需要更换或修理故障件。当时没有合适的备件,可以先将参数900#3置“0”,暂时将手摇脉冲发生器不用,改为用点动按钮单脉冲发生器操作来进行刀具微调工作。等手摇脉冲发生器修好后再将该参数置“1”。 2.当机床开机后返回参考点时出现超行程报警。上述机床在返回参考点过程中,出现510或511超程报警,处理方法有两种: (1)若X轴在返回参考点过程中,出现510或是511超程报警,可将参数0700LT1X1 数值改为+99999999(或将0704LT1X2数值修改为-99999999)后,再一次返回参考点。若没有问题,则将参数0700或0704数值改为原来数值。 (2)同时按P和CAN键后开机,即可消除超程报警。 3.一台FANUC 0i数控车床,开机后不久出现ALM701报警。从维修说明书解释内容为控制部上部的风扇过热,打开机床电气柜,检查风扇电机不动作,检查风扇电源正常,可判定风扇损坏,因一时购买不到同类型风扇,即先将参数RRM8901#0改为“1”先释放ALM701报警,然后在强制冷风冷却,待风扇购到后,再将PRM8901改为“0”。 4.一台FANUC 0M数控系统加工中心,主轴在换刀过程中,当主轴与换刀臂接触的一瞬间,发生接触碰撞异响故障。分析故障原因是因为主轴定位不准,造成主轴头与换刀臂吻合不好,无疑会引起机械撞击声,两处均有明显的撞伤痕迹。经查,换刀臂与主轴头均无机械松动,且换刀臂定位动作准确,故采用修改N6577参数值解决,即将原数据1525改为1524后,故障排除。 5.密级型参数0900~0939维修法。按FANUC 0MC操作说明书的方法进行参数传输时,密级型参数0900~0939必须用MDI方式输入很不方便。现介绍一种可以传输包含密级型参数0900~0939在内的传输方法,步骤如下: (1)将方式开关设定在EDIT位置; (2)按PARAM键,选择显示参数的画面; (3)将外部接收设备设定在STAND BY(准备)状态; (4)先按EOB键不放开,再按OUTPOT键即将全部参数输出。 6.一台FANUC 0MC立式加工中心,由于绝对位置编码电池失效,导致X、Y、Z丢失参考点,必须重新设置参考点。 (1)将PWE“0”改为“1”,更改参数NO.76.1=1,NO.22改为00000000,此时CRT显示“300”报警即X、Y、Z轴必须手动返回参考点。 (2)关机再开机,利用手轮将X、Y移至参考点位置,改变参数NO.22为00000011,则表示X、Y已建立了参考点。 (3)将Z轴移至参考点附近,在主轴上安装一刀柄,然后手动机械手臂,使其完全夹紧刀柄。此时将参数NO.22改为00000111,即Z轴建立参考点。将NO76.1设“00”,PWE改为0。 (4)关机再开机,用G28 X0,Y0,Z0核对机械参考点。 7.由机床参数引起的无报警故障。一台FANUC 18i-W慢走丝,开机后CRT显示X、Y、U、V坐标轴位置显示不准确,即原正常显示小数点后三位数字,而且前显示小数点后四位数字,且CRT没有报警信息。首先应该怀疑是参数变化引起上述故障。检查参数发现 NO.0000#2 INI发生变化,原正常显示“0”(表示公制输入),而有故障时显示“1”(英制输
FANUC 故障维修
FANUC 0-C系统的基本结构及维修方法 一FANUC 0-C系统的基本结构1.主PCB板主PCB板(主印刷电路板)是系统的主控制板,由主CPU及其外围电路组成,也是安装其它PCB板的基板。是0-C系统的基本组成部分。系统控制单元有A 、B两种型号。A、B单元的选择是根据机床的需要来确定的,一般A规格主要用于4轴之内的系统,B规格用于5轴以上的系统。主PCB板与控制单元相同,也分为A、B两种规格,与控制单元配合使用。2.电源单元电源单元是0-C系统的基本组成部分,根据输出功率的不同有A、AI、B2三种型号,其中电源单元AI 包含了输入单元,是最常用的一种。3.存储卡存储卡是0-C系统的基本组成部分,是程序、数据存储的关键部分。另外,存储卡上还有串行主轴接口、模拟主轴接口、主轴位置编码器接口、手摇脉冲发生器接口、CRT/MDI接口、阅读机/穿孔机接口等。4.输入/输出卡输入/输出卡是0-C系统的基本组成部分,是连接CNC与机床侧开关信号的中间部分。根据输入/输出点数的不同,有I/OC5卡(I/O点数:40/40)、I/OC6卡(I/O点数:80/56)、I/OC7卡(I/O点数:104/72)几种。5.1~4轴控制卡/>1~4轴控制卡是0-C系统的基本组成部分。0-C系统采用全数字式伺服控制,其控制的核心(位置环、速度环、电流环)都在轴卡上。根据控制轴数的不同,轴卡分2轴卡、3/4轴卡几种。6.PMC-M控制卡PMC-M卡是0-C系统的选择部分。如果内装PMC-L不能满足要求,需要选择此控制卡。PMC-M卡有以下几种规格。PMC-M电路板A16B-1211-0907 />PMC-M(I/O Unit 光缆)A16B-1211-0909 PMC-M(I/O Link主+ 子功能)A16B-2200-0345 PMC-M(I/O Link主功能)A16B-2200-0346 />7.图形控制及2/3手脉接口卡图形控制及2/3手摇脉冲发生器接口卡是0-C系统的选择部分,当系统需要图形显示功能、伺服波形显示功能或要连接2/3手摇脉冲发生器时,必须选择此控制卡。8.宏程序ROM卡宏程序ROM卡是0-C系统的选择部分。系统使用宏程序执行器时,用户的宏程序固化在宏程序卡的ROM中。9.子CPU卡和远程缓冲卡子CPU卡和远程缓冲卡是0-C系统的选择部分。使用远程缓冲/DNC1/DNC2控制功能时,应选择此卡。该卡主要在系统与外设之间进行数据通讯和DNC控制时使用,通过选择不同的子CPU软件来实现不同的控制目的。远程缓冲卡A16B-1211-0930 A16B-2200-0770 />A16B-2200-0775 DNC1卡A16B-2200-0771 />A16B-2200-0776 DNC2卡A02B-0098-T056 10.5/6轴控制卡/>5/6轴控制卡是控制单元B的0-C系统才可选择的部分。使用5/6轴控制时,要选择此卡。该卡只能用于PMC控制轴,不能用于伺服控制轴。11.7/8轴控制卡7/8轴控制卡是控制单元B的0-C系统才可选择的部分。与5/6轴控制卡一样,该卡只能用于PMC控制轴,不能用于伺服控制轴。而与5/6轴卡不同的是该控制卡不包括子CPU。12.模拟输入/输出接口卡模拟输入/输出接口卡是控制单元B的0-C系统才可选择的部分。当用户使用多主轴模拟指令控制或者需要将模拟信号转换为数字信号时,可以选择此卡。二.FANUC 0-C系统控制单元的维修方法当系统接通电源后,如果电源正常,数控系统则会进入系统软件版本号显示画面(如下图所示),系统开始进行初始化。如果系统出现硬件故障,显示屏上会出现910~998号系统报警提示用户。下面介绍出现系统报警时的原因和处理方法。 fanuc系统诊断窗口和系统参数的显示和修改方法 1.诊断窗口的显示方法(1)按系统操作面板上的:“DGNNOS/PARAM”键,使CRT屏幕上出现“DGNOS”页面,如果出现的是“PARAM”页面,则可再按一次“DGNNOS/PARAM”键或CRT屏幕底部的软操作键“DGNOS”。(2)按系统操作面板上的“F/No.”键。(3)按
FANUC βi 系列维修说明书_部分1
FANUC AC SERVO MOTOR #*s series FANUC AC SPINDLE MOTOR #* series FANUC SERVO AMPLIF IER #* series 维修说明书 B-65325CM/01
·本说明书的任何内容不得以任何方式复制。 ·所有参数指标和设计可随时修改,恕不另行通知。 我们试图在本说明书中描述尽可能多的情况。 然而,对于那些不必做的和不可能做的情况,由于存在各种可能性,我们没有描述。因此,对于那些在说明书中没有特别描述的情况,可以视为“不可能”的情况。
B-65325CM/01为了安全使用为了安全使用 为了使您更安全的使用本公司的伺服电机、主轴电机以及伺服放大器(βi SVM βi SVPM),本公司已将相应的注意事项写入“为了安全使用”中。请在使用电机 及放大器之前仔细阅读“为了安全使用”。 另外,有关电机和放大器的各项功能请参阅本篇,请在完全理解的基础上正确使 用。 还有,对于“为了安全使用”中没有记录的事项,原则上是禁止操作的。有关此 方面的事项请在操作前预先与本公司进行联系。 目录 1.1 警告、注意、注释............................................................................................s-2 1.2 FANUC AC SERVO MOTOR βi s series, FANUC AC SPINDLE MOTOR βi series.........................................................s-3 1.2.1 警告..................................................................................................s-3 1.2.2 注意..................................................................................................s-5 1.2.3 注释..................................................................................................s-6 1.3 FANUC SERVO AMPLIFIER βi series............................................................s-8 1.3.1 安装时的警告及注意.......................................................................s-8 1.3.1.1 警告............................................................................................s-8 1.3.1.2 注意............................................................................................s-9 1.3.1.3 注释..........................................................................................s-10 1.3.2 试运行时的警告及注意.................................................................s-11 1.3. 2.1 警告..........................................................................................s-11 1.3. 2.2 注意..........................................................................................s-12 1.3.3 维护时的警告及注意.....................................................................s-13 1.3.3.1 警告..........................................................................................s-13 1.3.3.2 注意..........................................................................................s-14 1.3.3.3 注释..........................................................................................s-14
FANUC 10报警维修资料
FANUC 10/11/12/15系统报警和解决办法(1) FANUC10/11/12系统在一般情况下出现报警时,显示器屏幕上会显示报警号和报警内容。但当显示器屏幕没有显示时,可根据主板的LED显示内容来判断故障所在。 序号故障征兆故障原因解决办法 1 当主板上数码管显示A时1、显示器/MDI单元连接异常 1)确认MDI/显示器单元的连接光缆是否正确。 2)确认连接光缆是否损坏,请更换。 3)确认光缆座是否干净,请清洁。 2 主板上的数码管显示E 显示器/MDI单元与系统不匹配1)MDI/显示器单元有9"、14"等种类,请确认MDI/显示器单元是否与NC 的软件版号匹配。 2)与连接单元的连接是否正确。 3)检查MDI/显示器屏幕的连接电缆。 3 主板上的数码管显示F 连接单元和输入/输出卡D1--D3的连接异常1)连接单元的电缆连接是否正确。请检查确认其光缆及光缆座。 2)更换连接单元。 3)更换光缆及光缆座。 4)更换主板。 4 主板上的数码管D显示H 连接单元和输入/输出卡D1--D3与NC软件板本不匹配1)请检查确认NC软件的版本号。 2)请检查确认连接单元以及与连接单元的连接的电缆是否正确。 3)更换连接单元。 5 主板上的数码管显示C 通过光缆传输的数据出现错误1)请确认与光缆连接的控制板报警号信息。 2)更换主板。 3)更换MDI/显示器控制板。 4)更换连接单元及输入/输出单元。 5)更换光缆。 6)如果正在调试PC,请更换PCRAM板。 6 主板上数码管显示J 等待PC回应1)请确认系统是否装有PC-ROM盒PCRAM控制板、接口转换板、主板。 2)上述各控制板是否安装正确。 3)更换PMC-ROM盒 4)更换接口转换板 5)如果正在调试PC,更换PCRAM控制板 7 主板上的数码管显示L 等待PC准备1)请确认系统是否装有PC-ROM盒。 2)更换PCROM以及PC-ROM盒。 3)如果正在调试PC,更换PC-ROM控制板。 8 主板上的数码管显示B RAM奇偶校验错误1)更换主板。 2)请更换ROM/RAM控制板的附加存储器。 9 主板上的数码管显示E 系统错误1)更换主板。 2)更换NC软件。 3)更换ROM控制板。
FANUC βi 系列维修说明书_部分3
B-65325CM/01 βi SVM启动步骤 5.伺服放大器的定期维护5 伺服放大器的定期维护
5.伺服放大器的定期维护 βi SVM 启动步骤 B-65325CM/01 5.1 绝对脉冲编码器用电池 绝对脉冲编码器用电池内一共有 [连接方式1]和 [连接方式2] 两种连接方式。 [连接方式1] 从1台电池向多台SVM APC (绝对脉冲编码器)报警电池下降,或者电池电压为零时请更换电池。 另外,电池电压为零时,必须进行参考点返回操作。 βi S 系列伺服电机(β0.4/5000i S ~β22/2000i S )按照标准在绝对脉冲编码 器内装有备用电容器。并且,由于可持续10分钟左右的绝对位置检测运行, 所以在该时间内,即使切断伺服放大器电源更换电池时,也不需要进行参 考点返回操作。 另一方面,使用β系列伺服电机和部分βi S 系列伺服电机(β0.2/5000i S ~ β0.3/5000i S )时,由于脉冲编码器内没有安装内置备用电容器,此时必须 引起操作着的高度重视。详情请参阅项目末尾的[更换电池时的注意事项 NO.1]。 电池寿命在伺服电机6轴连接时以及βi S 系列伺服电机(β0.4/5000i S ~β 22/2000i S )时大约为2年,使用β系列伺服电机和部分βi S 系列伺服电机 (β0.2/5000i S ~β0.3/5000i S )时大约为 1年左右。因此,应当根据电池的 寿命定期更换电池。 电池为1号碱性干电池(4节)。并且可使用市面出售的电池。
B-65325CM/01 βi SVM启动步骤 5.伺服放大器的定期维护[连接方式2] 内置电池在各SVM内的安装方法 APC(绝对脉冲编码器)报警器电池容量降低或者电池电压为零时,请更 换电池(A06B-6093-K001)。 另外,电池电压为零时,必须进行参考点返回操作。 βi S系列伺服电机(β0.4/5000i S ~β22/2000i S)按照标准在绝对脉冲编码 器内装有备用电容器。并且,由于可持续10分钟左右的绝对位置检测运行, 所以在该时间内,即使切断伺服放大器电源更换电池时,也不需要进行参 考点返回操作。 另一方面,使用β系列伺服电机和部分βi S系列伺服电机(β0.2/5000i S ~ β0.3/5000i S)时,由于脉冲编码器内没有安装内置备用电容器,此时必须 引起操作者的高度重视。详情请参阅项目末尾的[更换电池时的注意事项 NO.1]。 电池寿命在βi S系列伺服电机(β0.4/5000i S ~β22/2000i S)时为2年,使 用β系列伺服电机和部分βi S系列伺服电机(β0.2/5000i S ~β0.3/5000i S) 时大约为1年左右。因此,应当根据电池的寿命定期更换电池。 内置电池为非市场购买产品,因此,必须向我公司购买。因此,建议用户 事先准备好备用的内置电池。
FANUC维修问答_系统报警
1:SVM 故障: LED显示2,怎样解除报警. SPM 故障: LED显示19,怎样解除报警. 谢谢! SVM 报警代码2, (1) 内容:变频器控制电源低电压 (2) 主要原因和排除方法 (a) 确认放大器的3相输入电压(应大于等于额定输入电压的倍) (b) 确认PSM 输出的24V 电源电压(正常时:大于等于 (c) 确认连接器、电缆(CXA2A/B) (d)更换SVM SPM报警代码19、20 U 相(报警代码19)、V 相(报警代码20)电流检测电路的偏移电压过大。通电时进行检测。发生报警时,请更换SPM。发生在刚更换SPM 控制印制电路板后时,请确认功率单元与SPM 控制印制电路板之间连接器的插入情况。 2:SVM故障:LED显示2号报警,查资料是内部控制回路用电源电压已下降.或控制印刷版上的时钟已停止.我想问内部控制回路用电源电压是靠电池供电还是供给控制电源供电.通过怎样方法解决谢谢! 内部控制回路用电源电压是靠PSM供给+24V电源供电 LED显示2号报警:变频器控制电源低电压报警 (1) 内容:变频器DC 链路部低电压 (2) 主要原因和排除方法 (a) 确认放大器的3相输入电压(应大于等于额定输入电压的倍) (b) 确认PSM 输出的24V 电源电压(正常时:大于等于 (c) 确认连接器、电缆(CXA2A/B) (d) 更换SVM 3:空气开关跳下,X,Y,Z三轴显示401报警,稳压电源无输出.当开关打上又正常工作. "稳压电源无输出"中的稳压电源是否指+24电源是否有可能有短路 4:专家你好,我看到有些车床的换档用到M41-M44的M指令,这个M指令是通过译码得来的吗我看书上知道M36,后面的是怎么回事还有一个就是我的光栅尺参考标记点在尺子中间,每次回零时都要先移动到超过中点后才可以回到零点,要不然就报90号报警,不知道可不可以通过修改参数将其移到离零点近的地方呀 1。所有M代码都需要译码才能使用。除了M00,M01,M02,M30有特定意义以外,其他的都可随意指定。 2。没有办法改变,回零前如果没有检测到光栅的0信号,就不可能正确的找到零点,所以就会出现90号报警。 5:专家你好!我是发那科系统的一名用户,系统为0-TD最近出现一故障,现象为:1、CRT上显示401号与414号报警; 2、驱动器上显示9。不知道是什么原因,请专家指导,谢谢! 驱动器上显示9说明伺服放大器控制的第二个轴有异常电流。 (1) 内容:变频器 IPM 报警 (2) 主要原因和排除方法 (a) 请切实按下面板(控制基板)。 (b) 将电机的动力线从SVM 上拆下,解除急停 ①没有发生IPM 报警时 →至(b)
FANUC i电气维修说明书
FANUC 18i-MB 电气维护说明书
目录
1.维护说明 1.1 操作面板外观 (a) 横式操作面板 RESRT POS PROG SYSTEM MESSAGE CUSTOM OFS /SET CAN GRAPH DELETE PAGE PAGE SHIFT HELP INPUT INSERT ALTER EOB 1 23 456789O N G P X Y Z Q I J K R M S T L F D H B ( )E C U V W ? , A @#= * + [ ]&SP X Y Z 45 1 st.#2 2 nd. +Y -Y +X -X +Z +4+5-Z -4 -5 RERURN ALL 44CLAMP 5 5CLAMP BLOCK SKIP BLOCK SINGLE STOP OPT TLM OPTION COOLANT CHIP MDI MEMORY EDIT REMOTE HANDLE JOG RAPID 1 st. RETURN 2 nd. RETURN #2 mm 10inch 1 mm 100 inch 10mm 1000inch 501%25%50%100% % READY MC ALARM RESET MC ?NEUTRAL ORIENT CCW SPOT CW FEED RADT ATC CYCLE RAPID SPINDLE SPINDLE % EMG .STOP FEED HOLD CYCLE START 0 20 406080200 180160140120 100 %Z MC ?AUTO RESTART HANDLE INT .Z-AXIS CANCLE MACHINE LOCK MST LOCK PROGRAM STOP PROGRAM END ALARM DRY RUN 100% MST
FANUC系统常见故障维修
FANUC系统常见故障诊断与处理方法 摘要:介绍日本日立精机、牧野精机、森精机等公司产数控系统,包括了FANUC 16i、18i、21i、18T、21T等系列的故障:如电网闪断停机、内置脉冲编码器通信异常、伺服放大器误差、外围器件损坏等进行了分析逐步查找及处理。 关键词:FANUC系统故障诊断维修 一、电网闪断和断电停机后出现的故障 1.一台森精机产SH403加工中心,采用FANUC 18iMA系统。电网闪断恢复后重新开机,显示“EX0557 OIL&AIR LUBRICANTPRESSURE DOWN”(主轴的油气润滑系统压力低下)报警。检查发现中间继电器未接通,润滑泵无100V电压供给。检查该中间继电器OK。利用系统的自诊断功能,检查PMC信号,发现开机时,油气润滑的供油信号输出接点Y6.4接通,但该中间继电器线圈却不得电,于是,怀疑接点所在的I/0模块UNIT1-2的基板有问题。将该印刷电路板对比调试后,未发现有任何问题,而该模块的其他输出接点均正常,据此判定是该输出接点烧坏。替代,故障排除。 2.一台牧野产V55立式加工中心,采用FANUC 16 Mi系统。设备断电停机几小时后再开机时,显示“306 APC ALARM: AXISBATTERY VOLTAGE 0(X);306 APC ALARM:AXIS BATTERYVOLTAGE 0(Y);306 APC ALARM:AXIS BATTERY VOLTAGE 0(Z);“300 APC ALARM: AXIS NEED ZRN (X);300 APC ALARMAXIS NEED ZRN (Y);300 APC ALARM: AXIS NEE D ZRN (Z)”。这时切勿关断设备电源,将NC后备电池(4节)更换后,按“RESET”键即可消除306报警,然后选定“原点回归”方式,对各轴执行原点回归操作。各轴回参考点后再按“RESET”键即可消除300报警。但若在出现上述报警后关断电源,换完NC后备电池后开机,X轴可按上述常规方法返回参考点,而Y、Z轴却无法彻底返回参考点,CRT显示“90 REFERENCE RETURN INCOMPLETE”报警。这时须将参数#1815中Y、Z轴对应的APC、APZ分别由1改为0,断电重启设备后按上述常规方法分别对Y、Z轴执行原点回归操作。回参考点后将y、z轴对应的APC由0改为1,再次断电重启设备后将Y、Z 轴对应的APZ由0改为1,最后断电重启设备,报警排除。 二、伺服系统故障 1.伺服电机内置脉冲编码器故障 一台森精机产SH403加工中心,加工过程中显示“351 APCALARM: AXIS COMMUNICATION(B) ;368 AXIS: SERIAL DATA ER-ROR(INT) (B)”报警。FANUC说明书指示,该报警的原因是由于B轴伺服电机内置脉冲编码器通信异常。断电后检查并重新插接B轴伺服放大器相关电缆后试机故障依旧,因此推测是由于脉冲编码器故障。打开机内Z轴防护伸缩盖板,发现B轴伺服电机周围积有大量铁屑,且电机后端的编码器防护盖破损,脉冲编码器已损坏。替换后安装试机,又显示“EX2561 SERVOBATTERY ABNORMAL;306 APC ALARM: AXIS BATTERY VOLT-AGE 0(B);300 APC ALARM: AXIS NEED ZRN(B);307 APCALARM: AXIS BATTERY