倍福故障手册只是分享
6、厂家产品介绍
6.1 倍福
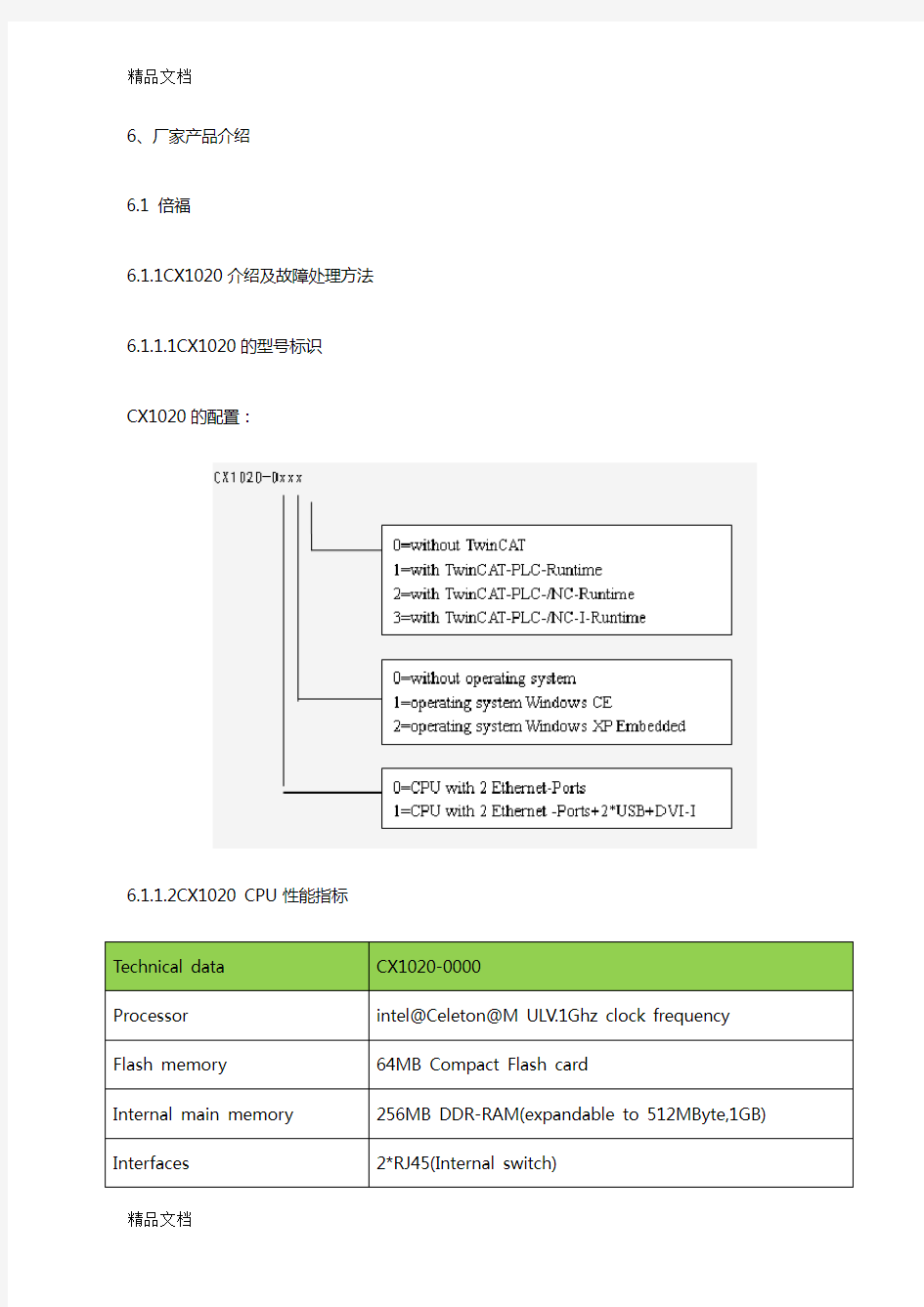
6.1.1CX1020介绍及故障处理方法6.1.1.1CX1020的型号标识
CX1020的配置:
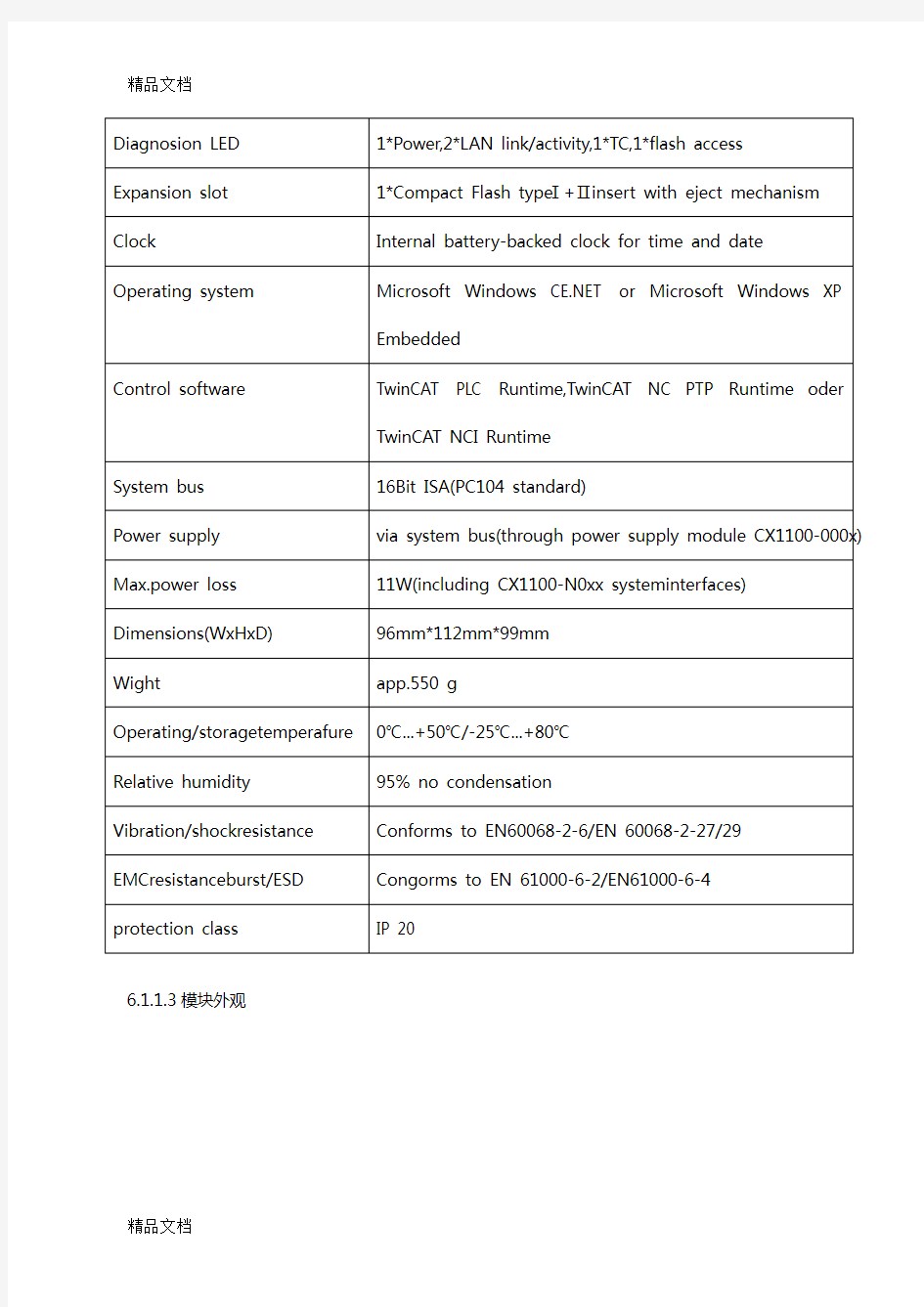
6.1.1.2CX1020 CPU 性能指标
6.1.1.3模块外观
6.1.1.4电源模块与CPU的组装
将模块安装到导轨上:
a、在装到导轨之前将模块下白色锁紧机构拉下,使其不起作用。(如下图)
b、将模块后的卡槽对准导轨轻轻按下,然后推上白色紧锁机构,至此CPU和模块的机械安装完毕。
c、将模块安装到导轨上。
d、CF卡的安装方法
6.1.1.5 CPU诊断初步——指示灯
TC指示灯饿几种状态,直接反映了TwinCAT的运行状态。(CX1020-0000)
6.1.1.6 CPU 诊断初步——常见故障及处理
6.1.1.7CX1100-00XX诊断介绍
I/O Error指示灯在快速闪烁之后,第一次慢闪烁表示错误码,第二次慢闪烁为具体的出错信息。
诊断过程:
例如:系统上电后,cx1100-0002 I/O error指示灯闪烁不停。记录快速闪烁后的第一次慢次数
对照上面诊断信息进行原因分析和出错处理。
6.1.2 I/O 模块介绍及故障处理方法
6.1.2.1 KLL1104
(1)模块介绍
4通道输入端子模块额定电压24V DC 3.0ms滤波
“0”信号电压-3V…5V “1”信号电压15V…30V
(1)LED灯
每一个数字量输入通道都有一个对应的LED灯。如果该通道有输入,则该LED等变为绿色。没有输入的时候,LED等不亮。
(3)诊断方法
a、如果有输入信号,但是LED灯没有亮。可能是LED灯坏了,也有可能是输入通道坏了。
b、检查该通道的输入信号电压是否在15V-30V之间。
c、检查TwinCAT System Manager中该通道的值。
如果电压不在15V-30V之间,并且TSM文件中钙通道的值为“1”。则是LED灯坏了。
如果电压在15V-30V之间,并且TSM文件中该通道的值为“0”。则是改通道硬件出了问题。
6.1.2.2 KL2134
(1)模块介绍
4通道数字量输出端子,额定电压24V DC,额定电流0.5A
(1)LED灯
每一个数字量输出通道都有一个对应的LED灯。如果该通道有输出,则该LED灯变为绿色。没有输出地时候,LED灯不亮。
(3)诊断方法
a、如果在TSM文件中输出信号置为“1”,但是LED灯没有亮。可能是LED灯坏了,也有可能是输出通道坏了。
b、检查TwinCAT System Manager 中该通道的值是否置为“1”。
c、检查该通道的输出信号电压与模块自带的0V电压之间差是否在24V。如果TSM文件中该通道的值为“1”,LED灯没有亮,并且通道的输出电压在24V左右。则是LED灯坏了。
d、如果TSM文件中该通道的值为“1”,LED灯也亮了,但是通道没有电压输出,则是该通道硬件出了问题。
e、如果TSM文件中该通道的值为“1”,LED灯没有亮,但是通道没有电压输出,则是该模块出现问题。
6.1.2.3 KL3204
(1)模块介绍
4 通道模拟量输入端子,PT100(RTD)
(1)LED灯
每一个输入通道都有一个对应的故障LED灯。正常时,LED灯不亮,如果LED灯为红色,则表示该通道的传感器线路或者断路
(3)诊断方法
如果LED灯为红色。
a、检查传感器的线路,有无短路和断路。
b、检查该通道的输入信号
c、如何检测该通道的输入是否正确:在相应的通道中插入固定值的电阻,在TSM文件中,检查该通
道的的输入值是否和电阻值相符合。
6.1.2.4 KL3404
(1)模块介绍
4 点差分量模拟量输入,-10V…+10V, 12位
(2)LED灯
每一个输入通道都有一个对应的故障LED灯。正常时,LED灯亮,为绿色。当控制器和总线耦合器之间在大于100ms的时间内没有过程数据通讯传输的话,绿灯会灭掉,这时就出现了一个看门狗计时器溢出现象。
(3)诊断方法
如果LED的绿灯灭了。
a、检查线路,有无短路和断路。
b、检查该通道的输入信号。
c、检查是否存在过程数据丢失现象。
6.1.2.5 KL5001
(1)模块介绍
SSI编码器接口端子
(2)LED灯
KL5001只有一个输入通道LED灯。正常时,LED灯亮,为绿色。当控制器和总线耦合器之间在大于100ms的时间内没有过程数据通讯传输的话,绿灯会灭掉,这时就出现了一个看门狗计时器溢出现象。(3)诊断方法
诊断位,Status值,
如果LED的绿灯灭了:
1、检查编码器线路,有无短路和断路。
2、检查TSM文件中Status的值,判断问题的出处。
3、检查是否存在过程数据丢失现象。
6.1.2.6 KL9210
(1)模块介绍
KL9210可以放在端子排的任意位置,它的作用是给它右方的端子提供电源,并且KL9210具有诊断功能,还可以添加熔断器。
(2)LED灯
LED灯,当供电端子正常的时候,绿灯亮,当不正常的时候,红灯亮。
(3)诊断方法
简易单轴运动控制器使用说明书
简易单轴运动控制器使用说明书 该款简易单轴运动控制器SAMC(Simple Axis Motion Controller)不需编程,提供多种运动方式:单向单次、往返单次、单向连续、往返连续,自动回原点等,参数设置合理简单,工作中实时显示位置状态,适用于单轴步进电机的各种场合控制应用,如自动送料、自动冲床、自动剪板机、器件编带、商标印刷、切标机、切带机、化妆品封尾等。 一、性能指标: 1.输出脉冲频率:20KHz。 2.位置最大设置值999900脉冲。 3.速度最小设置值100Hz、加速度最小设置值100Hz/s。 二、电气特性: 1.工作电源:DC24V。 2.输入检测口:5V开关信号(IO1\IO2\IO3\IO4,TTL电平)。 3.输出控制口:P+、P-、D+、D-、E+、E-都是差分输出,当用作单端时,可利用Vcc(+5V)与P+、D+、E+配合使用。 三、使用操作说明 控制器底端有六个按键,分别是MODE、SET、SHIFT、UP、RUN、STOP分别表示模式、设定、移位、上加、运行、停止。控制器通电(24V)以后,数码管全部显示零。1.位移设定 按下MODE键,则显示1,表示位移设定模式,如需进入该模式,则按下SET键,此时百位闪烁(位移、速度、加速度的设置值规定都是100的整数倍,所以位移、速度、加速度都是从百位开始设置),每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT 键,则千位开始闪烁,同样方法完成各位设置。当位移值设定好以后,则再次按下SET键,此时设定的位移值成功被CPU读取。位移初始默认值是40000。 2.最大速度设定 再次按下MODE键,则显示2,表示最大速度设定模式,最大速度表示位移进给过程中最大进给速度,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。当最大速度设定好以后,则再次按下SET键,此时设定的最大速度成功被CPU读取。最大速度初始默认值是4000。 3.加速度设定 再次按下MODE键,则显示3,表示加速度设定模式,该值表示位移进给过程中电机按此加速度加速到最大速度或者减速到零,如需进入该模式,则按下SET键,此时百位闪烁,每按下一次UP键、数字显示增加1,百位设置完成后,按SHIFT键,则千位开始闪烁,同样方法完成各位设置。当加速度设定好以后,则再次按下SET键,此时设定的加速度成功被CPU读取。最大加速度初始默认值是4000。 4. 两次运行间隔时间设定 再次按下MODE键,则显示4,表示两次运行间隔时间设定模式,如需进入该模式,则按下SET键,此时个位闪烁,每按下一次UP键、数字显示增加1(1表示两次运行过程中间隔时间是1秒,如果该位不设置则默认为1秒),如果两次运行中间间隔时间较长、则按下SHIFT键,设置十位,设置完成后再次按下SET键,此时设定的连续运行停留时间被CPU读取。注:最大停留时间最大是99秒。
倍福故障手册
6、厂家产品介绍 6.1 倍福 6.1.1CX1020介绍及故障处理方法 6.1.1.1CX1020的型号标识 CX1020的配置: 6.1.1.2CX1020 CPU 性能指标 Technical data CX1020-0000 Processor intel@Celeton@M ULV.1Ghz clock frequency Flash memory64MB Compact Flash card Internal main memory256MB DDR-RAM(expandable to 512MByte,1GB) Interfaces2*RJ45(Internal switch) Diagnosion LED1*Power,2*LAN link/activity,1*TC,1*flash access Expansion slot1*Compact Flash typeⅠ+Ⅱinsert with eject mechanism Clock Internal battery-backed clock for time and date Operating system Microsoft Windows https://www.360docs.net/doc/e67341036.html, or Microsoft Windows XP Embedded Control software TwinCAT PLC Runtime,TwinCAT NC PTP Runtime oder TwinCAT NCI Runtime System bus16Bit ISA(PC104 standard) Power supply via system bus(through power supply module CX1100-000x) Max.power loss11W(including CX1100-N0xx systeminterfaces) Dimensions(WxHxD)96mm*112mm*99mm
单轴控制器使用手册
单轴运动控制器操作手册 目录 一与外部驱动器及IO(输入输出)接线图 (4) 二用户管理操作 (5) 三系统参数设置 (6) 四IO(输入输出)设置 (7) 五系统自检操作 (10) 六手动操作 (12) 七编程操作 (14)
八自动执行 (17) 九指令详解 (18) 十电子齿轮计算及公式 (20) 十一编程案例 (23) 十二常见问题及处理 (28)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线)
注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。二用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内
容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。 三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分两屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。
Beckhoff测量模块
Beckhoff 的自动化技术适用于各种信号和现场总线,可为 所有常用的 I/O 信号、模拟量信号和现场总线系统提供全 系列的现场总线组件。EtherCAT 是用于实现工业自动化的 以太网解决方案,具有性能优异和操作简单的特点。 本书详述了 Beckhoff 现场总线模块中的测量模块、高精度 模块、XFC 模块和宽温模块。目录 现场总线端子模块简介 测量模块的的应用 ? 只有 12mm 宽的测量仪器 ——基于现场总线的测量模块 ? 称重模块介绍 ? 三相电力模块介绍 ? 万用表介绍 ? 振动测量模块介绍? 温度测量模块介绍? 高精度模块? XFC 模块? 宽温模块SCOPE VIEW 2 软件介绍
只有 12 mm 宽的测量仪器 ——基于现场总线的测量模块
称重模块介绍三相电力测量模块介绍 EL3356 和 EL3356-0010 称重测量端子模块可以直接连接一个电阻桥或者 1 个 6 线制的称重传感器,最终的重量值作为一个过程数据在模块内部计算,不需要在 PLC 上面进行额外的计算。 为了满足各种需求,这系列模块有以下特点: ? 测量误差 <0.01% ? 高分辨率:16 位(EL3356)或者 24 位(EL3356-0010) ? 采样时间:10 ms(EL3356)或者 100 μs(EL3356-0010) ? 电路自整定——消除温漂和时漂 ? 分布式时钟模式——可以获取采样数据的具体时间(仅 EL3356-0010) ? 手动输入传感器的铭牌参数(如 KG 和 mV/V)以及通过整定程序来整定传感器的参数(如零平衡点) ? 预制皮重功能,可以在测量值中去掉产品外包装的重量 ? 针对高速动态称重的特殊功能 可以使用 EL3356 来实现高精度慢速称重测量任务,而 EL3356-0010 特别适合用于快速、准确监测扭矩或张力的传感器。 此类传感器的应用范围包括: ? 称重任务:慢速料仓测量或快速装袋 ? 运动部件的张力测量 ? 静载荷下的变形测量和变形报警 ? 通过传感器变形进行压力测量EL3403、EL3413 和 EL3773 EtherCAT 电力测量端子模块可以直接通过现场总线对相连工厂或建筑物电网进行能耗分析,也可以对各个用电设备进行具体的能耗数据分析。 EL3403 测量范围为500V AC 3~,1A,通过测量到电压(U)和电流(I)的有效值,EL3403可以计算出有功功率(P),能源消耗(W)以及功率因数(cos j)等。 EL3413 测量范围为 690 V AC 3~,5A,专为直接监测高性能发电机而设计,例如,可用于风力发电行业。电流输入回路之间互相电气绝缘。 EL3773 测量范围为 500V AC 3~/410V DC,1A AC/1.5A DC。这是一款极端高速的测量设备,能够以最高达每 100 μs 采样一次的速度测量数值,然后将测量数据传输至控制器。控制器拥有足够的运算能力来进行有效值或性能的计算,且用户能执行基于所测电压电流的复杂自定 义算法。
双轴运动控制器操作手册
双轴运动控制器操作手册 目录 一 与外部驱动器及IO(输入输出)接线图 (3) 二 用户管理操作 (4) 三 系统参数设置 (5) 四 IO(输入输出)设置 (6) 五 系统自检操作 (8) 六 手动操作 (9) 七 编程操作 (11) 八 自动执行 (13) 九 指令详解 (14) 十 电子齿轮计算及公式 (15) 十一 编程案例 (17)
十二 常见问题及处理 (19)
一与外部驱动器及IO(输入输出)接线图 1.控制器与步进驱动器或伺服驱动器的连接(红色线为1号线) 2.IO(外部开关及继电器)的接线图(红色线为1号线) 注:因输入采用低电平有效,若选用光电开关,则需要选择NPN型。
二 用户管理操作 注意:所有重要参数只有用户登录以后才可修改保存。防止他人随意更改参数,影响加工质量。 从主画面进入参数设置,并进入用户管理,进行密码输入。 输入用户密码,按确认键,若输入正确,则提示“用户登陆成功”,否则提示“密码错误,请重新输入”。用户密码出厂值为“123456”。 用户登录成功后,则可进行加工参数的修改保存。否则加工参数不可修改保存。若进入此界面后,提示“用户已登录!”,表示用户登录成功。 然后直接按退出按键,对系统参数及IO 设置进行编辑,编辑完成,再次进入用户管理,并选择用户退出,按确认键,当前参数设置里的内容全部不可更改。若需要修改,再次进入用户管理进行登录。 注:用户密码可以修改。但是必须要记忆下新设的密码,否则加工参数将不可修改保存。
三系统参数设置 从主界面的参数设置里进入系统参数,通过移动光标,对光标所在位置进行数据修改。共分4屏,按“上页”“下页”键切换。 控制参数修改完毕可进入速度参数界面进行速度的参数修改,共2屏,修改方式同上。 修改完成后,按参数保存进入参数保存界面,按确认键对当前修改完成的数据进行保存。若保存成功则提示“参数保存成功”。
倍福PLC编程应用常见问题解答
目录 Q:TwinCAT的全称是什么? (2) Q:TwinCAT图标不同颜色各表示什么意义? (2) Q:什么是ADS? (2) Q:什么是source code download? (2) Q:怎样自启动PLC并运行程序? (3) Q:PLC变量如何与实际IO通道关联起来? (4) Q:PLC程序中能否执行关机重启等Windows的系统功能命令 (6) Q:System Manager处于何种模式时可以诊断IO模块的输入输出状态? (7) Q:把IO扫描上来后,怎样强制输出? (7) Q:TwinCAT Broadcast Search不到控制器的解决办法? (9) Q:TwinCAT PLC编程界面如图所示部分是用来干什么的? (9) Q:我在编写梯形图程序时,每当我定义/命名一个触点,软件就会弹出一个对话框,这个对话框是用来干什么的? (9) Q:TwinCAT延时启动方法? (9) Q:对数字量输出置true后但是输出一直在闪烁是什么问题? (13) Q:如果beckhoff某个端子模块出现故障并更换(甚至更换错了型号),PLC程序还会运行吗? (13) Q:强制数字量输出后,重新运行程序(停止后再运行)或者重新上电,会不会恢复原来值? (14) Q:如果工控机执行个死循环,那我们还可以连接到它吗? (14) Q:EL3318热电偶模块怎么在SystemManager里面添加进去(如何添加新模块到老TWINCAT版本) (14) Q:如何保证TwinCAT系统在进入操作系统后自动启动 (14) Q:如何在SystemManager中进行IO的组态? (15) Q:我用TwinCAT经常广播不到CP6701-0001-0020这屏,能ping通,但就是经常Broadcast不到 (18) Q:下载程序后,程序并没有运行,这是为什么? (18) Q:有什么功能可以诊断实际任务循环时间大于预设时间 (18) Q:在ST语言中和梯形图中分别如何添加功能块? (19) Q:TwinCAT添加路由需要注意什么? (19) Q:64位的操作系统安装了Tc211x64Engineering_R3_2.11.2230之后,无法切换LOCAL到运行模式? (23)
倍福模块故障诊断
1 、嵌入式PLC CX1020故障诊断: 1.1查看LED灯状态 1.2连接不上CX1020,防火墙关掉,杀毒软件禁用所有监控,甚至自动更新关掉。 如果还连不上,怎么办,拨码,恢复出厂值。 如果还连接不上,那就重新刷CE 的IMAGE文件。 如何刷新CE 的IMAGE文件,直接取出CF卡。U盘直接拷,覆盖掉Hard Disk的IMAGE文件,FTP下载到CF卡,然后更新。
2、E-BUS耦合器EK1100的故障诊断:2.1查看LED灯状态 2.2 在System Manager 里查看。 3、数字输入EL1004 诊断 3.1 查看LED灯状态
3.2在System Manager 里查看EL1004状态。 4、数字输出EL2004 和EL2024的诊断 4.1 查看LED灯状态 4.2在System Manager 里查看EL2004和EL2024状态。 5、模拟量输入模块EL3142的诊断(0-20mA) 5.1查看LED灯状态,查看Information System里对应故障。 5.2在System Manager 里查看EL3142状态。 6、PT100的模拟量输入模块EL3202诊断 6.1查看LED灯状态,查看Information System里对应故障。
6.2在System Manager 里查看EL3202状态。 7、2通道继电器输出端子模块EL2612诊断7.1 查看LED灯状态 7.2在System Manager 里查看EL2612状态。
8、带时间戳的输入端子模块EL1252 诊断 8.1查看LED灯状态 8.2在System Manager 里查看EL1252状态 9、PROFIBUS DP 端子(主站)EL6731和EL731-0010(从站)诊断9.1 查看LED灯状态
nMotion运动控制卡使用手册2.0
nMotion运动控制卡使用手册 nMotion控制卡特点: 支持Mach3所有版本,包括目前最新版本. 支持所有Windows版本,包括Windows8 USB无需驱动,所有Windows版本即插即用,支持热插。 USB总线采用高档芯片磁耦隔离,真正有价值的隔离,不同于一般控制卡的光耦隔离输入输出,做到了超可靠性,绝对保证电脑USB的安全。同时保证的超强的EMC抗干扰能力。 单芯片,系统更精减,比一般的又芯片处理方式稳定性高出不知多少倍。 双核超高速CPU(单核最高主频204MHz),运算处理能力有极大冗余。并保证实现4轴联动下500KHz的脉冲输出频率,6轴联动的脉冲输出频率最高达300KHz,可接伺服/步进。 运动控制缓冲大小可设,保证最快插补周期也能稳定运行,电脑运行负荷过重时也能平稳运行。 拥有16路输入口,输入接口更简单,端口干湿接点均可,接线更为简单,干接点方法只要外部接一个物理开关到地线即可,所有16路输入口都有信号指示,为低电平时指示灯亮,调试简单明了。 拥有8路输出口,单路输出驱动能力500mA,可直接驱动直流继电器 PWM调速输出端口,可设PWM频率,0~1000连续可调 拥有测速功能,主轴实际转速在Mach3界面中实时显示,测量精准稳定。 电路板由工程师精心打造,设计水平一目了然。 带有256字节NVRAM空间,可保存6个轴的座标值,下次上电无需找零点。
目录 nMotion运动控制卡使用手册 (1) nMotion控制卡特点: (1) 目录 (2) 外观及安装孔机械尺寸: (5) 1 Mach3的软件安装 (6) 1.1安装准备 (6) 1.2 USB电缆的准备 (6) 1.3运动控制卡的软件安装 (7) 2 Mach3的软件配置 (8) 3.运动控制卡的硬件安装 (11) 3.15轴输出信号 (11) 3.2 16个输入端子(Input Port)引脚位置图 (12) 3.3 8路控制输出端子引脚位置图: (13) 4. 引脚功能描述 (14) 4.1 5轴输出端子(Axis Output Port )引脚功能描述 (14) 4.2 16 个输入端子(Input Port)引脚功能描述 (14) 4.3 输出端子(Out Port)引脚功能描述: (15) 5 USB运动控制卡的接线图 (16) 5.1 X、Y、Z、A、B轴输出 (16) 5.2 输入端口 (18) 5.3 各类规格传感器的接线和配置方法 (19) 5.4 输出端口 (20) 6 外部倍率旋钮 (21) 7 主轴调速PWM模拟量输出 (23) 7.2 主轴调速模拟输出接口原理图 (26) 7.3 主轴输出接线图(通用变频器的接线图) (27) 8 主轴测速 (27) 8.1 nmotion控制卡配置对话框 (27) 8.2 主轴转速显示 (28)
SR-12401运动控制器用户手册
SR-12401系统控制器用户手册 第1章概述 产品命名规则: SR - 12 4 0 1 XX 年份轴数0:脉冲0:PCI XX:客户自定义 1:模拟1:以太网 1.2 主要特征 输出脉冲可以设定为普通脉冲(脉冲加方向)或双脉冲模式,输出逻辑也可以选择。 可实现任意2~4轴线性插补以及任意两轴圆弧插补。 运动中可实时改变速度及目标位置。 提供线性加减速和S曲线加减速功能。 消除速度曲线中的尖角即最大速度校正功能 预置运动数据功能。在执行一个运动过程时,可以将接下来的两个要执行的运动参数写入芯片的缓冲区。 软件限位功能。 间隙补偿功能 打滑校正功能。 同时启动和同时停止功能 减振功能 手轮控制功能 操作开关直接控制功能 失步检测功能 空转脉冲输出功能 操作模式有:连续、定长、回原点运动以及线性插补和圆弧插补。通过相应的设置,还可以使用以下模式:通过指令启动/停止;用手轮脉冲输入实现连续和定长运动;用操作开关信号启动连续运动或定长运动;回原点运动;用指令实现定长运动;通过外部信号实现硬件启动定长运动;通过外部信号触发改变目标位置。 运动中可实时读取逻辑位置、实际位置、驱动速度、加速度、驱动状态。 可接受伺服驱动器的各种信号:如编码器Z相信号、到位信号、报警信号、误差清除信号等。
4轴可同动同停,具有紧急停止输入信号。 支持windows95/98/NT/2000/XP/WIN7、linux等操作系统。 支持C/BC++/VC/VB/C++Builder/Labview等开发工具编程。 1.3 应用环境 操作温度:0~60℃ 储存温度:-20~80℃ 湿度:5~95% 无凝结 1.4 应用领域 可以服务于各个行业,从精密到微米级的设备到上千马力的重型设备。 应用包括: 机器人 食品机械 机床 印刷机械 木工机械 包装机械 装配线 材料处理 光学控制 橡胶机械 自动缠绕设备 激光切割 1.5 功能描述 脉冲输出: 4路脉冲输出,可以是脉冲方向或脉冲脉冲模式,最大输出脉冲频率4Mpps。 编码器输入: 输入信号模式可以是:90°相差信号(1倍、2倍、4倍)或双脉冲信号(在EA上输入正脉冲或者在EB上输入负脉冲)。 开关量输入/输出: 共32通道可编程输入输出。 其中:光耦隔离输入,输入电压:24V 集电极开路输出,NPN集电极开路:24V,最大电流:500mA。 控制方式: 提供多种控制方式:如定量运动、回零运动、多轴直线插补、二轴圆弧插补等。 位置管理:速度控制: 提供了线性加减速和S曲线加减速功能。因为加速度、减速度可以分别设置,所以可以实现线性加速、S形减速的运动,通过调整加速度和减速度可以在S形加减速曲线中插入线性加减速过程。 运动中可以改变速度及目标位置。 缓存功能: 大容量硬件缓存功能,可以确保运动连续,支持64Mflash缓存,用于存储插补指令。
倍福PLC编程应用常见问题解答
倍福PLC编程应用常见问题解答 目录Q:TwinCAT的全称是什么?............................................................. .........................2Q:TwinCAT图标不同颜色各表示什么意义?. (2) Q:什么是ADS?......................................................... ................................................2Q:什么是sourcecodedownload?............................... ............................................2Q:怎样自启动PLC并运行程序?............................................................... ................3Q:PLC变量如何与实际IO 通道关联起来?............................................................. 4Q:PLC程序中能否执行关机重启等Windows的系统功能命令.............................6Q:SystemManager
处于何种模式时可以诊断IO模块的输入输出状态?...........7Q:把IO扫描上来后,怎样强制输出?............................................................. ......7Q:TwinCATBroadcastSearch不到控制器的解决办法?..........................................9Q:TwinCATPLC编程界面如图所示部分是用来干什么的?...................................9Q:我在编写梯形图程序时,每当我定义/命名一个触点,软件就会弹出一个对话框,这个对话框是用来干什么的?............................................................. ...............9Q:TwinCAT延时启动方法?............................................................... .........................9Q:对数字量输出置true 后但是输出一直在闪烁是什么问题?.........................13Q:如果beckhoff 某个端子模块出现故障并更换,PLC程序还会运行吗?.............................................................
维宏数控运动控制系统用户手册
威克 雕刻机控制系统VicStudio V5.4 用户指南 南京威克曼科技实业有限公司 二○○四年五月
目录 1概述-----------------------------------------------1 1.1 系统结构及组成------------------------------------------------------1 1.2 控制软件特性--------------------------------------------------------1 2系统安装与连接-------------------------------------3 2.1VicStudio的系统基本配置--------------------------------------------3 计算机主机 操作系统 2.2VicStudio系统的安装------------------------------------------------4 安装软件 安装运动控制卡 重新起动计算机 2.3其它安装问题--------------------------------------------------------5 2.4卸载Vicstudio 系统--------------------------------------------------5 2.5VicStudio控制卡与驱动系统的连接-------------------------------------5 2.6雕刻机安装的步骤和要求-----------------------------------------------5 3VicStudio基本概念------------------------- ---------7 3.1操作模式与状态------------------------------------------------------7 操作模式 操作状态 3.2机床坐标系----------------------------------------------------------8 机械坐标系 工件坐标系 4 VicStudio的操作界面--------------------------------10 4.1 标题栏---------------------------------------------------------------11 4.2 菜单栏---------------------------------------------------------------12 4.3 工具栏---------------------------------------------------------------13 4.4 数控信息栏-----------------------------------------------------------13
倍福模块故障诊断
倍福模块故障诊断
————————————————————————————————作者: ————————————————————————————————日期: ?
1 、嵌入式PLC CX1020故障诊断: 1.1查看LED灯状态 ? 1.2连接不上CX1020,防火墙关掉,杀毒软件禁用所有监控,甚至自动更新关掉。 如果还连不上,怎么办,拨码,恢复出厂值。 如果还连接不上,那就重新刷CE 的IMAGE文件。 如何刷新CE 的IMAGE文件,直接取出CF卡。U盘直接拷,覆盖掉HardDisk的IM AGE文件,FTP下载到CF卡,然后更新。
2、E-BUS耦合器EK1100的故障诊断: 2.1查看LED灯状态 2.2在System Manager 里查看。 3、数字输入EL1004 诊断 3.1 查看LED灯状态
3.2在SystemManager 里查看EL1004状态。 4、数字输出EL2004 和EL2024的诊断 4.1 查看LED灯状态 4.2在System Manager 里查看EL2004和EL2024状态。 5、模拟量输入模块EL3142的诊断(0-20mA) 5.1查看LED灯状态,查看InformationSystem里对应故障。 5.2在System Manager 里查看EL3142状态。 6、PT100的模拟量输入模块EL3202诊断 6.1查看LED灯状态,查看InformationSystem里对应故障。
6.2在System Manager 里查看EL3202状态。 7、2通道继电器输出端子模块EL2612诊断7.1 查看LED灯状态 7.2在SystemManager 里查看EL2612状态。
倍福PLC 无法与电脑连接解决方法
倍福PLC 无法与电脑连接的解决方法 倍福PLC 的型号是CX9020,电脑上刚安装好TwinCAT 2.1软件时,可以用一根网线直接和CX9020 连接。连接很方便。不用象连其它PLC 那样去指定IP 地址,只要设定自动获取IP 地址就可以通过 TwinCAT 2.1 提供的广播搜索功能连到CX9020。 后来,不知安装了什么其他软件,再用广播查找功能,就再也连不上了。而且诡异的是网卡的状态如下图所示,是没有IP 地址的。 查了一下CX9020的IP 地址,是 169.254.215.207,子网掩码是 255.255.0.0 ,于是就指定电脑网卡的IP 地址 为169.254.0.10, 子网掩码也是 255.255.0.0。再通过TwinCAT 2.1 提供的广播搜索功能,就可以连上CX9020 了。 继续查找原因,原来 169.254.XXX.XXX 是保留的IP 网段。在开启了DHCP 功能,但又连不到DHCP 服务器的情况下,系统自动获得一个IP 地址,这个IP 地址以169.254 开头。这
个过程叫做"自动专用IP寻址"(APIPA),是一种DHCP 故障转移机制。我的电脑和CX9020 都设置了DHCP 功能,通过网线直接相连,没有连到DHCP服务器,CX9020 自动获得了一个169.254.网段地址,而我的电脑没有获得。查我的电脑设置,发现已经设置了自动专用IP 功能。如下图所示,但就是不起作用。 继续查找原因,原来注册表里还有个设置,用Regedit 命令进入注册表编辑器,在HKEY_LOCAL_MACHINE\SYSTEM\CurrentControlSet\Services\Tcpip\Parameters 下有个IPAutoconfigurationEnabled,要设成1, 并且要在下面Interfaces 下对应接口内的IPAutoconfigurationEnabled 也要设为1。重启电脑,就可以正常连接CX0920。 至此,恢复到了刚安装TWINCAT 2.1 时的状态。之所以出现无法连接的问题,应该是后面安装的某些软件把注册表内IPAutoconfigurationEnabled 改为0 了。
倍福故障手册
盛年不重来,一日难再晨。及时宜自勉,岁月不待人。 6、厂家产品介绍 6.1 倍福 6.1.1CX1020介绍及故障处理方法 6.1.1.1CX1020的型号标识 CX1020的配置: 6.1.1.2CX1020 CPU 性能指标 Technical data CX1020-0000 Processor intel@Celeton@M ULV.1Ghz clock frequency Flash memory 64MB Compact Flash card Internal main memory 256MB DDR-RAM(expandable to 512MByte,1GB) Interfaces 2*RJ45(Internal switch) Diagnosion LED 1*Power,2*LAN link/activity,1*TC,1*flash access Expansion slot 1*Compact Flash typeⅠ+Ⅱinsert with eject mechanism Clock Internal battery-backed clock for time and date Operating system Microsoft Windows https://www.360docs.net/doc/e67341036.html, or Microsoft Windows XP Embedded Control software TwinCAT PLC Runtime,TwinCAT NC PTP Runtime oder TwinCAT NCI Runtime System bus 16Bit ISA(PC104 standard)
运动控制器软件说明书-V1.0
运动控制器软件说明书 第一部分:软件产品简介(重点介绍软件实现的功能,技术特点、参数)运动控制器软件是由电子自主研发的一款嵌入式软件产品,可以配合SPC-STW-26A1型号运动控制器实现IO扩展功能以满足各种恶劣工况条件下的分布式控制应用需求。该运动控制软件采用16位CPU—Infineon XC2287作为数据控制核心,遵守IEC 61131-3标准的CoDeSys 2.3编程环境,支持CANOpen协议。并且可任意配置数字量输入有效电平和频率阈值,以满足客户的不同需求。 本软件实现的主要功能有: ?最多可支持26路数字量输入,可配置有效电平; ?最多支持10路模拟电压输入,其中6路0~10V,4路0~32V; ?最多支持8路4~20mA电流输入; ?最多支持6路频率输入,阈值可配置; ?2路CAN,支持CANOpen协议; ?1路标准RS232通信口,波特率可配置; ?1路固定5V或可变5V输出; ?1路D+低功耗输入检测信号; ?所有输入端口支持误接电源、地; ?高防护等级(IP67); 本软件具备如下技术特点: ?根据IEC61131标准,采用“扫描输入→计算处理→输出控制”架构,系 统结构紧凑简单,稳定性可靠性高; ?系统采用ARM公司的CMSIS-RTOS实时操作系统内核; ?具有二次开发能力,开发平台基于IEC61131-3标准,支持CoDeSys2.3编 程; ?系统输入输出响应时间快,能够及时的反馈输入信号和产生输出信号,并 对输出状态进行保护; ?通信采用标准CANopen协议,易于与国际CAN通信主流融合;
?软件通过深层次的与CPU内部硬件结合,有效的降低了CPU的软件负载 率; ?软件能实时对自身运行状态进行监控,出现故障时将及时恢复。 第二部分:功能模块介绍(完整的设计流程图、功能模块图) 运动控制器软件设计可以分为接收端和发送端两部分,主要包括CAN通信、输入数据采集与检测、单片机数据存储与处理、数据输出等,具体设计思路与流程如下图1所示:
倍福Beckhoff在步进电机控制中的应用研究汇总
倍福Beckhoff在步进电机控制中的应 用研究 倍福Beckhoff在步进电机控制中的应用研究 类别:传感与控制 该系统为某主机电控系统,完成对光束的准直过程中的参数诊断、数据采集、闭环控制等实时控制功能以及与主控系统的通信功能。步进电机以性价比高,实时效果好,不需要昂贵的反馈系统著称,该系统中采用了一千多个步进电机来实现对光束的准直。神光原型采用控制卡控制大量步进电机,控制卡控制步进电机没有负载位置的反馈信号,实时效果差,故障定位非常困难;试验中采用西门子PLC(Programmable Logic Controller,可编程逻辑控制器)控制这些电机可靠性好,但控制少量步进电机时比较简单,控制大量步进电机时时序复杂,接线复杂,成本高,调试困难。最终方案采用德国Beckhoff公司的自动化产品,如嵌入式控制器,现场总线端子、步进电机总线端子等设备控制电机,该方案具有成本较低、操作简便、占用空间小等优点,也提高了系统的性能和可靠性,现已通过试验和审进入调试阶段。 1 步进电机运动控制系统总体设计思想电控系统的总体设计思想为:控制系统设计应分别满足现场独立控制与远程集中控制,各子系统具备对系统各类设备的状态进行实时监测的功能,包括故障定位检测和报警;具备对系统各设备进行参数设置、参数采集、存储、处理等功能。主控计算机位于主控制室内,通过1 000 Mb/s光纤网络与分控计算机通信,分控计算机通过光纤交换机与控制设备采用工业以太网通信,其网络拓扑图如图1所示。 2 步进电机运动控制系统设计方案 2.1 倍福步进电机总体控制架构设计采用基于嵌入式PC的模块化运动控制器,型号为CX1020,运动控制器本身集成双Ethernet 接口,其中一个向上连接到现场工业以太网,接受运动控制的调用指令,另一个可以作为本地调试的网络接口。运动控制器、运动控制网络接口部件、步进电机驱动器通过硬实时的超高速以太网EtherCAT(Ethernet for Controland Automation Technology)构成运动控制网络系统,采用EtherCAT取代以往的现场总线传输技术,可以显著减少控制系统CPU的负荷,而且无需任何智能主站卡,适合集中式与分布式控制体系。末端端子与底层EtherCAT总线耦合器端子BK1120相连,在本机架内总线耦合器通过K-Bus总线接口连接电机驱动总线端子KL2531和KL2541,步进电机直接连接在这两个端子上,如果使用 KL2541端子,还需要在机架上安设数字输入端子KL1002,用于接人步进电机限位信号,最后在机架末端安放BK9010总线终端端子。每级机架上总线耦合器BK1120的另一网络端口向下依次级联另一机架上的总线耦合器,最后从控制器到各级机架网络节点形成一个总线型的控制网络拓扑结构。KL2531和 KL2541是步进电机总线端子,提供一路20 kHz的脉冲,可以各带一个步进电机。步进电机总体控制架构如图2所示。具体的控制器和通讯模块等数量配置见表1。 2.2 硬件组成电机控制系统主要由控制服务器、运动
运动控制卡说明书
运动控制卡说明书 篇一:HY-JK02-M 5轴运动控制卡使用说明书 HY-JK02-M 5-axis interface board manual Thank you for choosing our products,For your use of NC products better and faster,Please read this manual In the test machine, note the following before 1, note that using the 5V power supply 2, determine the stepper driver works (Model0) 3, to determine the drive wiring step Second, "the definition of the pin : 5V 1A power supply, please take more than switching power supplies, power input received indicated on the map interface Spindle motor control is controlled via the parallel port PIN1. Spindle motor voltage must comply with the supply voltage range. Three "MACH software to use Figure 1 Figure 1, open the MACH3 software, then select OK now mach3MILL
7SC3xx-4xxA系列运动控制器使用说明书(2015-11新)
SOFN INSTRUMENTS CO.,LTD 7SC3xx/4xxA Motion Controller 北京赛凡光电仪器有限公司 0 目录 1.运动控制器内部驱动器设置的输出电流------------------------------------------ 1 2.运动控制器前操作面板-------------------------------------------------------- 1 3.运动控制器后操作面板-------------------------------------------------------- 3 4.运动控制器与电动位移台的连接------------------------------------------------ 3 5.运动控制器的手动运行方式---------------------------------------------------- 4 5.1参数设定 -------------------------------------------------------------------------------------------------------------- 4 5.2位移量(步)计算-------------------------------------------------------------------------------------------------- 5 5.3移动电移台到指定位置 ------------------------------------------------------------------------------------------- 5 5.4其他 -------------------------------------------------------------------------------------------------------------------- 6 6.7SS3运动控制软件联机运行--------------------------------------------------- 6 6.1技术参数 -------------------------------------------------------------------------------------------------------------- 6 6.2综合介绍 -------------------------------------------------------------------------------------------------------------- 6 7.故障分析及排除------------------------------------------------------------- 13