基于特征线条的手势识别
手势识别算法总结

手势识别算法总结手势识别算法是指通过计算机视觉和模式识别技术,对人的手势进行实时检测和分类的过程。
手势识别算法在人机交互、虚拟现实、智能监控等领域具有广泛的应用前景。
本文将对手势识别算法的基本原理、分类方法、应用领域等进行综述。
手势识别算法的基本原理是利用图像或视频中的人手部分进行检测和分类。
首先,通过图像或视频的采集设备(如摄像头)获得人手的图像序列。
然后,对获得的图像进行预处理,包括背景减除、手势分割、噪声过滤等。
接着,对预处理后的图像进行特征提取,常用的特征包括颜色特征、纹理特征、形状特征等。
最后,通过训练分类器对提取的特征进行分类,得到手势的类别。
手势识别算法可以分为基于2D图像和3D模型的方法。
基于2D图像的方法是指在2D平面上对手势进行检测和分类。
常用的算法包括基于背景减除的方法、基于模板匹配的方法、基于统计学的方法等。
基于背景减除的方法通过建模背景和前景来实现手势分割,然后对分割的手势进行特征提取和分类。
基于模板匹配的方法是指事先构建一系列模板,然后将待识别手势与模板进行匹配,选择匹配最好的模板作为识别结果。
基于统计学的方法是指通过统计的方法计算手势与训练样本之间的相似性,然后选取相似性最高的样本作为识别结果。
基于3D模型的方法是指在3D空间中对手势进行检测和分类。
常用的算法包括基于深度摄像机的方法、基于传感器的方法、基于模型拟合的方法等。
基于深度摄像机的方法通过获取物体与摄像机之间的深度信息,从而实现对手势的精确定位和分类。
基于传感器的方法是指通过手持传感器(如陀螺仪、加速度计等)获取手势的运动轨迹和姿态信息,然后对这些信息进行处理和分类。
基于模型拟合的方法是指通过建立手势模型,然后将待识别手势与模型进行拟合,选取拟合效果最好的模型作为识别结果。
手势识别算法在许多领域具有广泛的应用。
在人机交互中,手势识别可以替代传统的鼠标和键盘输入,提供更直观、自然的交互方式。
在虚拟现实中,手势识别可以实现用户的身体感知和控制,增强虚拟场景的沉浸感。
整理了现有的手势识别的重点,以及几个重要方法的特点,对每种方法都分析了优缺点
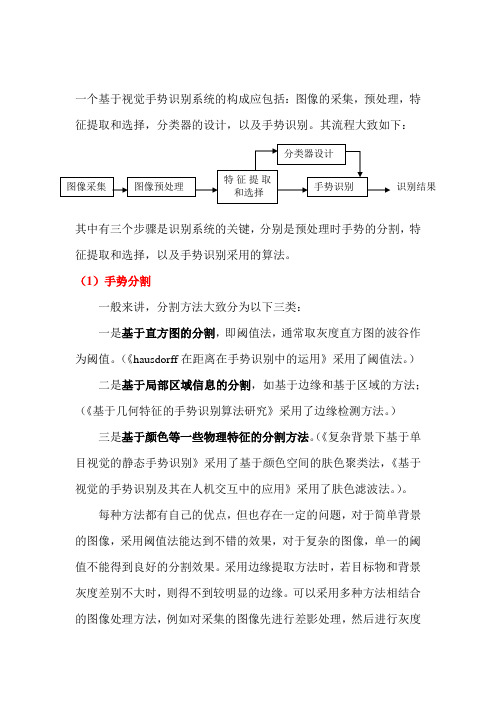
一个基于视觉手势识别系统的构成应包括:图像的采集,预处理,特征提取和选择,分类器的设计,以及手势识别。
其流程大致如下:其中有三个步骤是识别系统的关键,分别是预处理时手势的分割,特征提取和选择,以及手势识别采用的算法。
(1)手势分割一般来讲,分割方法大致分为以下三类:一是基于直方图的分割,即阈值法,通常取灰度直方图的波谷作为阈值。
(《hausdorff在距离在手势识别中的运用》采用了阈值法。
)二是基于局部区域信息的分割,如基于边缘和基于区域的方法;(《基于几何特征的手势识别算法研究》采用了边缘检测方法。
)三是基于颜色等一些物理特征的分割方法。
(《复杂背景下基于单目视觉的静态手势识别》采用了基于颜色空间的肤色聚类法,《基于视觉的手势识别及其在人机交互中的应用》采用了肤色滤波法。
)。
每种方法都有自己的优点,但也存在一定的问题,对于简单背景的图像,采用阈值法能达到不错的效果,对于复杂的图像,单一的阈值不能得到良好的分割效果。
采用边缘提取方法时,若目标物和背景灰度差别不大时,则得不到较明显的边缘。
可以采用多种方法相结合的图像处理方法,例如对采集的图像先进行差影处理,然后进行灰度阈值分割,或者对图像按区域分成小块,对每一块进行设置阈值。
手势分割是手势识别系统中的关键技术之一,它直接影响系统的识别率,目前的分割技术大都需要对背景,用户以及视频采集加以约束。
其受背景复杂度和光照变化的影响最大,可以在这些方面进行改进。
(2)特征提取和选择手势本身具有丰富的形变,运动以及纹理特征,选取合理的特征对于手势的识别至关重要。
目前常用的手势特征有:轮廓、边缘、图像矩、图像特征向量以及区域直方图特征等等。
《基于计算机视觉的手势识别研究》中提到了多尺度模型,它就是采用此模型提取手势的指尖的数量和位置,将指尖和掌心连线,采用距离公式计算各指尖到掌心的距离,再采用反余弦公式计算各指尖与掌心连线间的夹角,将距离和夹角作为选择的特征。
手势识别与跟踪技术研究

手势识别与跟踪技术研究手势识别与跟踪技术是一种通过计算机视觉和图像处理技术来识别和跟踪人体手势的技术。
随着人机交互技术的发展,手势识别与跟踪技术成为了一种新型的人机交互方式,可以广泛应用于虚拟现实、游戏、智能家居等领域。
本文将介绍手势识别与跟踪技术的研究内容、方法和应用,并探讨其未来发展方向。
手势识别与跟踪技术的研究内容包括静态手势识别、动态手势识别和手势跟踪。
静态手势识别是指通过对手的姿态进行分析和识别,来判断手势的含义。
动态手势识别则是根据手势的运动轨迹和速度等特征进行识别。
手势跟踪是通过对手的位置和运动进行实时追踪,以实现与用户的实时交互。
手势识别与跟踪技术的研究方法主要包括基于视觉特征、基于深度学习和基于传感器的方法。
基于视觉特征的方法主要通过提取手的外形和纹理等特征来进行手势识别和跟踪。
基于深度学习的方法则是利用神经网络来学习和提取手势的特征,以提高识别和跟踪的准确性和鲁棒性。
基于传感器的方法则是借助于传感器设备,如摄像头、雷达等,来获取手势的信息,并进行分析和处理。
手势识别与跟踪技术在很多领域都有广泛的应用。
在虚拟现实领域,手势识别与跟踪技术可以用于控制虚拟场景中的物体和角色,增强用户对虚拟环境的交互感。
在游戏领域,手势识别与跟踪技术可以实现更加自然和直观的游戏操作方式,提升游戏的娱乐性和沉浸感。
在智能家居领域,手势识别与跟踪技术可以用于智能设备的控制,如通过手势操作灯光、电视等家居设备,实现更加智能化的家居体验。
随着硬件技术的进步和算法的不断创新,手势识别与跟踪技术有着广阔的发展前景。
未来的研究方向主要包括提高识别和跟踪的准确性和鲁棒性,探索更加高效和可靠的数据处理算法,以及研究更加优化和智能化的交互方式。
此外,还可以结合其他技术,如人脸识别、语音识别等,实现更加全面和多样化的人机交互体验。
总之,手势识别与跟踪技术是一种新型的人机交互方式,具有广泛的应用前景。
通过对手势的识别和跟踪,可以实现更加自然、直观和智能化的人机交互,提升用户的体验和满意度。
基于多点特征提取的手势识别的研究

基于多点特征提取的手势识别的研究手势识别系统是指人类用语言中枢建立起来的一套用手掌和手指位置、形状构成的特定语言系统。
为了解决传统手势识别计算量大的问题,在已有的手势识别基础上,提出一种重心距离的手势识别方法。
通过肤色检测方法进行手势分割,计算手的重心,将手的边缘的点与重心点的距离按顺时针方向或者逆时针方向遍历,就会出现五个峰值,分别是五个手指。
实验结果表明,与现有方法相比,此方法在識别速度方面有了明显的提高。
标签:手势识别;肤色检测;手势分割;指尖检测Abstract:Gesture recognition system (GRS)is a special language system composed of palm and finger position and shape,which is established by human language center. In order to solve the problem of heavy computation in traditional gesture recognition,a new gesture recognition method based on barycentric distance is proposed. The skin color detection method is used to segment the hand gesture,calculate the center of gravity of the hand,and traverse the distance between the edge of the hand and the center of gravity clockwise or counterclockwise,and there will be five peaks,five fingers respectively. The experimental results show that the recognition speed of the proposed method is much higher than that of the existing methods.Keywords:gesture recognition;skin color detection;gesture segmentation;fingertip detection1 概述手势作为一种人类日常普遍使用的交互方式,因其形象生动而成为了人机交互中的非常重要的一部分。
如何使用AI技术进行手势识别和分析

如何使用AI技术进行手势识别和分析一、手势识别与分析的概述随着人工智能(Artificial Intelligence,简称AI)技术的不断发展,手势识别和分析逐渐成为研究的热点领域。
手势是人类交流的重要方式之一,通过分析手势可以推测人的意图、情感以及思维过程,对于理解人类行为和提升用户体验具有重要意义。
手势识别和分析主要通过计算机视觉技术来完成,其中AI技术扮演了关键角色。
利用AI技术进行手势识别不仅可以实现高准确率的分类和定位,还能够处理复杂背景下的捕捉和跟踪问题。
本文将介绍如何使用AI技术进行手势识别和分析,并探讨其应用领域与挑战。
二、基于深度学习的手势识别算法1. 数据收集与标注:首先需要收集并标注大量带有手势动作的图像或视频数据集。
这些数据集需包含多种姿态、角度和光照条件下的手势图像,并按照不同类型进行标注。
2. 网络模型选择:基于深度学习方法实现手势识别,通常选择卷积神经网络(Convolutional Neural Network,简称CNN)作为网络模型。
CNN具备处理图像数据的能力,并且可以通过训练自动学习到关键特征用于分类。
3. 数据预处理与增强:在输入数据进入网络之前,需要进行一系列预处理和增强操作。
例如,可以使用图像增强技术提高网络的鲁棒性和泛化能力,同时对图像进行标准化、旋转或平移等变换以适应不同的输入。
4. 模型训练与优化:利用标注好的手势图像数据集,通过监督学习的方式对网络进行训练。
采用适当的损失函数和优化器来最小化预测结果与真实标签之间的差异,并调整参数使得网络输出更加接近真实手势。
5. 模型评估与验证:在模型训练完成后,需要对其进行评估和验证。
通过将新样本输入已经训练好的模型中,并观察其预测结果是否与真实情况匹配来判断模型的准确性和可靠性。
三、手势识别技术在各行业中的应用1. 人机交互界面:利用AI技术进行手势识别,可以实现自然、直观的人机交互界面。
例如,在虚拟现实(VR)或增强现实(AR)应用中,用户可以通过手势来控制游戏、浏览信息或操作界面。
基于深度学习的手势识别技术

基于深度学习的手势识别技术手势识别技术是一种基于计算机视觉的技术,通过分析和识别人类手势的动作和姿态,实现人机交互。
近年来,随着深度学习算法的快速发展,基于深度学习的手势识别技术取得了显著进展。
本文将从深度学习算法、数据集和应用领域三个方面来探讨基于深度学习的手势识别技术。
一、深度学习算法1. 卷积神经网络(CNN)卷积神经网络是一种广泛应用于图像处理领域的深度学习模型。
在手势识别中,CNN通过多层卷积层和汇聚层来提取图像中的特征,并通过全连接层将提取到的特征映射到不同类别上。
CNN在处理图像数据方面具有很强的优势,因此在手势识别中得到了广泛应用。
2. 循环神经网络(RNN)循环神经网络是一种递归结构模型,在处理时序数据方面具有优秀性能。
在手势识别中,RNN可以对手势序列进行建模,捕捉手势之间的时序信息。
通过引入长短时记忆(LSTM)单元,RNN可以有效地解决梯度消失和梯度爆炸等问题,提高手势识别的准确性。
3. 生成对抗网络(GAN)生成对抗网络是一种通过两个神经网络相互对抗的方式来生成新样本的模型。
在手势识别中,GAN可以用于生成更多样本来增强数据集的多样性。
通过训练一个生成器网络和一个判别器网络,GAN可以不断提高生成器生成样本的质量,并使得判别器更难以区分真实样本和虚假样本。
二、数据集1. MSRC-12数据集MSRC-12是一个常用于静态手势识别研究的数据集。
该数据集包含了12个不同类别的静态手势图像,并提供了准确标注信息。
MSRC-12数据集在深度学习算法中广泛应用,并被用于评估不同算法在静态手势识别上的性能。
2. ChaLearn Gesture Challenge数据集ChaLearn Gesture Challenge是一个大规模、多种类、多种姿态和动作变化丰富的动态手势识别数据集。
该数据集包含了来自不同人的手势视频序列,并提供了详细的标注信息。
ChaLearn GestureChallenge数据集对于研究动态手势识别算法和模型具有重要意义。
基于皮肤特性的人体手部识别算法的研究

任 永 捷 ( 市沈阳 沈阳 科学宫 )
摘要 : 本文利用 H V颜 色模型 , S 针对人体 皮肤 的色相统计特性 , 对人 体 手 部 进 行 了 识别 , 后通 过 中值 滤 波 消 除 了噪 声 , 后 计 算 出 然 最
了 手部 所在 的重 心 位 置 。
关键词 : S H V颜色模型
手势识别
中值滤波
随着 计 算机 技术 的发展 , 与计 算机 之 间 的交互 不再 人 局 限于 鼠标键 盘 , 别是 近年来 手势 在人 机 交互 中 占有越 特 来 越重 要 的地位 , 而人 体 手部 的识 别是人 体 姿态 识别 的重 要 基础 。目前 对人体 手部 的识 别主 要包括 基于皮 肤颜 色建 模、 基于 连续 神经 网络 与 马尔科 夫模 型 的手势 识别 等等 。 本 文主 要分 析 了基 于 皮肤 颜 色模 型 人 体手 部 在 复 杂 背景 下 的识 别过 程。识别过 程主 要包括 R GB到 HS V模 型 的转
的取值 : 实验过 程 中采用 的源自图片如下 _ 图 4 中值滤波后的图像
3 手部重心的计算
a) 原 始 图像 b 变 换 后 的 H分 量 )
图1 R GB颜色模型至 H V颜色模型的转换 S
手 部重 心 的计 算是 手部 位 置识 别 的 重要 特征 参 数 , 是 人 机交 互 的重要数 据。重心 的计 算 主要采 用 了一阶距 来计
I兰 呈 x : { 兰m l
31 5
辐条张力仪校准方 法研 究
吴子 荣 孙 维强 ( 山 计 测 所) 昆 市 量 试
摘要 : 随着 我国经济 的快速发展 , 对计 量仪器 的检定 、 校准 的需 则就调 整 高度 , 以保证 大梁 的平衡 。
基于计算机视觉技术的手势识别步骤与方法研究

基于计算机视觉技术的手势识别步骤与方法研究手势识别是一种基于计算机视觉技术的识别和理解人类手势的方法。
它可以应用于很多场景,如人机交互、智能家居、虚拟现实等。
本文将介绍基于计算机视觉技术的手势识别步骤与方法。
一、手势识别步骤1. 图像获取:获取图像是手势识别的第一步。
图像可以通过摄像头、 Kinect 等设备获取。
2. 预处理:对获取的图像进行预处理,包括去噪、裁切、增强等。
3. 特征提取:从图像中提取出手势的特征,用于识别。
常见的特征包括轮廓、颜色、纹理等。
4. 特征选择:根据不同的应用场景选择不同的特征,提高识别准确率。
5. 分类器训练:利用机器学习技术训练分类器,识别手势。
6. 手势识别:利用分类器对输入的图像进行识别,输出相应的手势。
手势识别方法可以分为基于传统图像处理技术和基于深度学习技术两类。
(1)基于颜色特征的手势识别方法:利用肤色分割技术,提取出人手的肤色区域,再进行形态学处理,提取出手势的轮廓,从而实现手势识别。
2. 基于深度学习技术的手势识别方法基于深度学习技术的手势识别方法,主要是利用卷积神经网络(CNN)对手势图像进行识别。
CNN 是一种基于多层神经网络的深度学习方法,能够自动从数据中提取出特征。
其中,常用的 CNN 架构包括 LeNet、AlexNet、VGG、GoogLeNet 等。
手势识别技术在很多场景中都有应用,如:1. 人机交互:利用手势识别技术,可以实现人机交互,代替传统的鼠标、键盘,提高交互效率。
2. 智能家居:利用手势识别技术,可以实现智能家居的控制,如打开灯、调节温度等。
3. 手势控制游戏:利用手势识别技术,可以实现游戏的手势控制,提高游戏的体验性。
总之,手势识别技术的应用前景广阔,随着计算机视觉技术的不断发展,手势识别技术将会不断完善,为人们带来更多的便利。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
任海兵 等:基于特征线条的手势识别 最后得到的图像 Et ,由一些能够表示手结构特征的曲线段组成,这些曲线段称为手的特征线条.
989
2 曲线段的跟踪
在利用边缘信息进行跟踪的系统中 , 通常是跟踪边缘中曲率变化比较大的特征点 , 在手势识别中 , 这种方法 的鲁棒性较低,一方面是由于手在运动过程中存在变形,同一部分在两幅图像中的曲率往往存在较大的差异 ;另 一方面是因为这种方法对于特征提取的要求较高,很难适用于复杂背景、复杂光照的情况. 本文将特征线条分割成等长度的微小曲线段 , 虽然特征线条可能有较大的变形 , 但是这些曲线段的变形很 小 , 可以认为只存在旋转和平移运动 . 在下一幅图中寻找对应的曲线段 ;根据各个曲线段的对应关系 , 跟踪手形 各部分的细微运动 , 最后解释为手的整体运动 . 各部分的细微运动可能不都是很准确 , 但是只要大部分比较准 确 , 利用信息的融合和鲁棒性约束 , 就可以解释出较为准确的整体运动 . 而如果小的曲线段跟踪很准确 , 就可以 得到各部分准确的细微运动,这对于研究手的细微运动很有帮助,可以达到替代数据手套的目的 , 因此具有很好 的扩展性. 2.1 运动补偿 将 t 时刻特征线条按等长的原则分割成小的曲线段,在 t + ∆t 时刻的特征线条图像中寻找最接近的曲线段 . 为了快速地进行计算,本文以直线段近似小的曲线段 , 以向量 ( x, y,θ ) 描述这个曲线段的特征, 其中 ( x, y ) 为曲线 段的中心坐标,θ为直线段与 x 轴的夹角. 由于在相邻的图像之间 , 手的运动不是很大 , 所以对应的小曲线段距离相距不是很大 . 而且 , 基本只存在平 移和旋转运动 , 形状基本保持不变 . 故匹配的原则是距离和夹角的相似 . 然而以向量 ( x, y,θ ) 直接度量两幅图像 中曲线段的相似性,就会出现一个问题 , 即只有两幅图中曲线段位置 ( x, y ) 和倾斜角θ差别都比较小 ,才能匹配成 功 .而事实上 , 手一直是运动的 , 只要有平移 , 同样的曲线段其位置在两幅图中几乎不可能相同 ;只要有旋转 , 倾斜 角就不可能相同 .所以 , 同样的曲线段在两幅图像中 , 由于手整体的平移和旋转 , ( x, y,θ ) 会产生一定的差异.在匹 配之前,必须先补偿手整体运动而导致的平移和旋转分量. ˆ 建模 ( 具体方法参见文献[2]), 以椭圆的中心作为手的中心,椭圆长轴与 x 轴的夹角 以椭圆为手区域图像 d t 作为手的倾斜角 . 通过两幅图像中手整体的中心位移和角的偏转,对 t 时刻曲线段的中心位置和倾斜角进行补 偿,具体方法如下 ˆ和d ˆ 的中心及倾斜角分别为 ( x , y , θ ) 和 ( x , y ,θ ) ,t 时刻图像中的一个曲线段 ( x , y ,θ ) , 增 设d
4 节简单介绍了手势识别的方法.最后为实验结果和结论.
1 特征线条的获取
已知 r ,g,b 分量组成的彩色手势图像序列 ,本文结合皮肤颜色信息和运动信息,利用种子算法 ,分割出运动的 人手 ;以彩色图像的过零点作为图像的精细边缘信息.最后结合两者结果 ,利用连续性和平滑性等得到人手的特 征线条. 1.1 手势分割 基于计算机视觉的手势识别技术中 , 由于环境因素多种多样 , 不可预见也无法描述 , 将人手与环境背景 ( 包 括手臂)划分开来始终是一个难点.为了较好地解决这个问题,我们采用运动信息和皮肤颜色信息融合的策略. 假设摄像机是处于静止状态,拍摄得到 r ,g ,b 分量组成的彩色图像序列.定义 s = ( x, y) 表示图像平面空间坐 标系 , t 表示时间坐标系 , i ( i = r ,g ,b ) 表示 r ,g ,b 中任意一个分量 . 那么 Iti 表示分量 i 在 t 时刻的亮度图像 .本文利用 t − ∆t , t , t + ∆t 时刻连续 3 帧图像计算 t 时刻 i 分量运动图像 dti 为 dti ( s ) = min(| I ti ( s ) − I ti− ∆t ( s ) |, | I ti ( s ) − I ti+ ∆t ( s ) |) , i = r , g, b . 综合 r,g,b 分量,可得彩色序列在 t 时刻的运动图像 dt 为
H S V 空间的聚集特性 ,将彩色视频图像转换为皮肤概率分布图像,通过 C A M S H I F T 算法 ,寻找 3 个最大的皮肤
区 域 块 , 利 用 位 置 和 面 积 等 约 束 条 件 分 割 出 人 手 . 而 Weng[7,8] 的 系 统 采 用 预 测 和 确 认 的 分 割 方 法
ˆ , 具体内容见参考 用运动的皮肤图像得到手的种子 , 在皮肤颜色图像中利用种子算法得到相应的手区域图像 d t 文献[2].
~
1.2 精细边缘信息的获取 在 RGB 图像中,以式(3)中的算子分别计算 r,g,b 分量上的边缘信息图像 etr(s),etg(s)和 etb(s): eti = Gσ * ∇I ti , i = r , g , b , ∇I ti
1000-9825/2002/13(05)0987-07
©2002 Journal of Software
软 件 学 报
Vol.13, No.5
基于特征线条的手势识别
任海兵, 徐光祐, 林学訚
á
(清华大学 计算机科学与技术系 人机交互与媒体集成研究所,北京 E-mail:
100084)
renhaibing@; xgy-dcs@; lxy-dcs@
摘要: 单目视觉的手势识别系统,通常把人手建模成一个像素或者一块,从整体上分析手势的运动参数并提取表观 特征.从细微之处着手,融合颜色、运动和边缘等多种信息以提取能够反应人手结构特性的特征线条 ,并将特征线条 分割成小的曲线段 ,跟踪这些曲线段的运动 .采用平面模型对手势图像表观的变化建模 ,根据各个曲线段的运动 ,融 合成手的整体运动分量.同时分析了图像坐标系的选取和对运动参数的影响,提出了随手运动的坐标系,以抽取平移 不变的平面模型参数,进行手势识别. 关 键 词: 特征线条;平面模型;平移不变;手势识别 中图法分类号: TP391 文献标识码: A
~ 最后 , 对运动图像进行平滑和二值化处理 , 得到运动图像 dt . 这个模型可以推广到运动的摄像机 , 只需要先
(1)
d t ( s ) = max( d tr ( s ), d tg ( s ), dtb ( s )) .
(2)
检测背景图像的整体运动,引入一个运动参数进行补偿[9].
Байду номын сангаас
利用人体皮肤颜色在 HLS 空间的分布 [13],可以排除运动图像 dt 中的非皮肤区域,得到运动的皮肤图像 . 利
在虚拟现实的环境中 , 键盘、鼠标、游戏杆目前是主要的输入工具.然而 , 这些工具几乎都是基于 2 D 的 , 在
3 D 环境中应用起来很不方便 ,不能实现自然而随意的人机交互 (human computer interaction, 简称 HCI). 而人的语
音、手势可以说是最为自然、最为方便的交流手段 , 同时手势又由于其在 3 D 环境中意义明确、方向精确 , 更是 虚拟现实中极好的输入工具.但是由于人手是复杂的变形体(defo r mable object ), 无法用简单的模型加以表示,人 手跟踪和手势识别又受到环境因素的影响 , 因此很多研究人员采用数据手套 (dataglove) 或者电磁波等方法 . 然 而手上带有数据手套或者电磁波发射器等接触性传感器(contact type sensors),不利于自然灵活的人机交互[1,2]. 随着计算机硬件的发展 , 计算机视觉的方法已经逐渐地应用在人手的定位、跟踪以及手势识别等方面 .其 中, 首先需要解决的问题是环境因素,特别是背景 ,对人手的分割、 定位造成的影响 . 在单目视觉系统中 , 最简单而 常用的方法是外加种种限制 , 如黑色或白色的墙壁、深色的服装等简化背景 , 或要求人手戴特殊颜色的手套或 者标记物 ( m a r k e r ) 等强调前景 , 这样可以直接从背景中划分出手区域[3~5]. 又有如 Gary[6] , 应用人体皮肤颜色在
r g
(3)
表示分量 i 在 t 时刻的差分图像 .融合各分量的边缘图像 et ( s ), et ( s ) 其中 Gσ 是标准差为 σ 的高斯滤波函数 , b 和 et ( s ), 并且去除干扰点 , 得到 R G B 图像的边缘信息 et . 在 et 图像中 ,再次求导数 ,水平方向和垂直方向的过零点 ˆt . (zero crossing)即为精细边缘,二值化后为精细边缘图像 e 1.3 特征线条的获取 ˆ 和精细边缘图像 e ˆt 都是二值图像. 将两者对应 由以上计算得到 , 每一幅图像对应的运动的皮肤颜色区域 d t ˆ . 然而 , 本文需要的是比较完整的特征线条 , 因此还需要根据特征 图像进行与操作 , 得到运动区域的边缘图像 E t 曲线的平滑性和连续性,去除干扰曲线、连接断开的线条等.
(prediction- and- verification segmentation scheme ), 先建立手势形状数据库 ,保存手势过程中各个时刻不同位置不
同比例的手势图像,分割时以此为模板计算相似度 , 进行复杂背景下的手势分割.Charles [9]使用 Markov 模型对 人手的轮廓建模 , 以从背景中分割出手轮廓 , 然而一个模型只能适用于一个特定的手形轮廓 . 当然 , 也有系统采 用双目立体视觉原理,由区域匹配计算图像各点视差,由视差分割人手区域,如 Joshua[10]. 人手模型在手势识别中占有更加重要的地位 . 手的模型多种多样 , 相应的特征也多种多样.而在以运动参数 为特征的手势识别中 , 几乎都是将人手建模成一点或者一块,直接计算整体的运动参数.L e e [11] 与 P e n g[12]都将手 看成一个点 ,以其运动轨迹作为手势特征 , 所不同的是 ,Lee 应用 H M M 模型判断手势的开始和结束 ,以进行手势 识别 ,而 P e n g 采用的是有限状态机 ( finite s tate machines) 的方法进行识别 .Starner[8] 以椭圆为人手建模 , 以椭圆中