Halcon学习(11)边缘检测(二)
halcon测量

close_measure(MeasureHandle) 释放内存
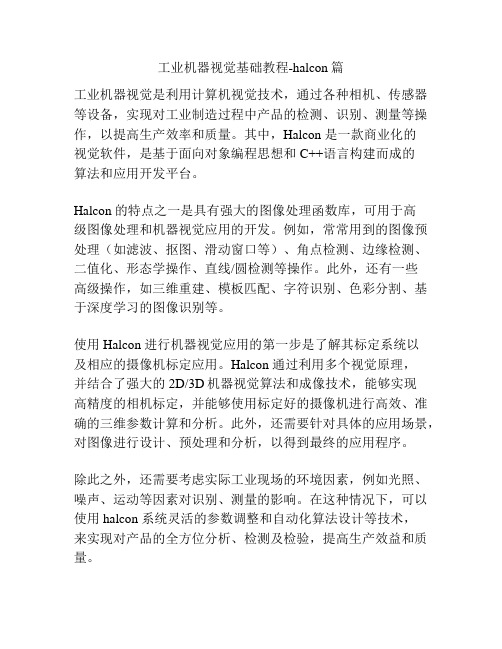
1D 测量:创建对象: gen_measure_arc
Profile Line
ROI
Radius
AngleExtend
Annulus Radius
AngleStart CenterRow CenterCol
1D 测量: measure_projection
0
3
6
剖面
9
12
15
index
1D 测量: measure_thresh
为测量对象计算剖面灰度值 通过阈值提取剖面函数和插值的交点 参数:
Image:输入图像 MeasureHandle: 剖面测量句柄 Sigma: 剖面高斯平滑的色散 Threshold: 剖面函数点提取阈值 Select:选取点的位置 Row/ColumnThres: 提取点的坐标(sub-pixels) Distance: 两连续点的距离(sub-pixels)
-20.0
'negative'
Distance
边缘提取
一阶导数
1D 测量: measure_pairs
在1D剖面上提取插值边缘 边缘分组 参数:
Image: 输入图像 MeasureHandle: 剖面线测量句柄 Sigma:剖面高斯平滑的色散 Threshold:剖面上提取边缘的最小梯度幅值 Transition:边缘灰度值过渡类型 Row/ColumnEdgeFirst: 一组对边中第一条边的坐标 AmplitudeFirst:一组对边中第一条边的过渡幅值 Row/ColumnEdgeSecond:一组对边中第二条边的坐标 AmplitudeSecond:一组对边中第二条边的过渡幅值 IntraDistance: 一组对边两个边缘之间的距离(sub-pixels) InterDistance: 相邻边缘之间的距离(sub-pixels)
边缘检测

边缘检测算子图像配准的方法7.4.1 基于特征的图像配准基于特征的图像配准首先提取图像信息的特征,然后以这些特征为模型进行配准。
特征提取的结果是一含有特征的表和对图像的描述,每个特征由一组属性表示,对属性的进一步描述包括边缘的定向和弧度、区域的大小等。
局部特征之间存在着相互关系,如几何关系、辐射度量关系、拓扑关系等。
可以用这些局部特征之间的关系描述全局特征。
通常基于局部特征配准大多都是基于点、线或边缘的,而全局特征的配准则是利用局部特征之间的关系进行配准的方法。
由于图像的特征点比图像的像素点要少很多,因此大大减少了配准过程的计算量,但特征提取方法的计算代价通常较大,不便于实时应用。
特征点的配准度量值对位置的变化比较敏感,可以大大提高配准的精确程度。
对于纹理较少的图像区域提取的特征的密度通常比较稀少,局部特征的提取就比较困难。
特征点的提取过程可以减少噪声的影响,对灰度变化、图像形变和遮挡等都有较好的适应能力。
因此,在图像配准领域得到了广泛应用。
基于特征的图像配准方法有两个重要环节:特征提取和特征配准。
7.4.2 基于互信息的图像配准医学图像配准技术从基于特征的配准方法发展到基于统计的配准方法有其突破性的意义。
与基于特征的配准方法相比,基于统计的配准方法的突出优点为鲁棒性好、配准精度高、人工干预少。
基于统计的配准方法通常是指最大互信息的图像配准方法。
基于互信息的图像配准是用两幅图像的联合概率分布与完全独立时的概率分布的广义距离来估计互信息,并作为多模态医学图像配准的测度。
当两幅基于共同的解剖结构的图像达到最佳配准时,它们的对应像素的灰度互信息应为最大。
由于基于互信息的配准对噪声比较敏感,首先,通过滤波和分割等方法对图像进行预处理。
然后进行采样、变换、插值、优化从而达到配准的目的。
基于互信息的配准技术属于基于像素相似性的方法。
它基于图像中所有的像素进行配准,基于互信息的图像配准引入了信息论中的概念,如熵、边缘熵、联合熵和互信息等,可使配准精度达到亚像素级的高精度。
边缘检测及拟合-概述说明以及解释
边缘检测及拟合-概述说明以及解释1.引言1.1 概述边缘检测及拟合是图像处理和计算机视觉领域中重要的技术研究方向,旨在从图像中提取出物体或目标的边缘信息,并进一步对边缘进行拟合和分析。
通过边缘检测和拟合,可以实现诸如物体检测、轮廓提取、目标跟踪、三维重构等多种计算机视觉任务。
边缘是指图像中灰度或颜色变化剧烈的区域。
边缘检测的目标是在图像中准确地标记和定位出这些边缘。
边缘检测是计算机视觉中常用的技术,具有广泛的应用领域,例如机器人导航、图像识别、医学影像处理等。
通过边缘检测,我们可以对图像进行分割,从而将图像分成不同的区域,方便后续处理。
边缘拟合是对图像中的边缘进行曲线或直线拟合的过程。
通过对边缘进行拟合,可以得到更加平滑的边缘曲线或直线,从而更好地描述物体的形状和轮廓。
边缘拟合广泛应用于图像重建、形状分析、目标识别等领域,能够提高边缘的准确性和鲁棒性。
边缘检测和拟合是紧密相连的两个过程,相互影响并共同完成对图像边缘的提取和分析。
边缘检测是边缘拟合的基础,而边缘拟合可以通过拟合来修正和优化边缘检测的结果。
在实际应用中,边缘检测和拟合经常需要同时进行,相互补充来提高整体的效果和精度。
本文将对边缘检测和拟合的概念进行介绍,并总结常用的方法和应用领域。
同时还会重点探讨边缘检测与拟合的关系,包括相互影响、综合应用以及未来的研究方向。
通过深入研究边缘检测及拟合的原理和方法,我们可以更好地理解图像的结构和特征,为计算机视觉和图像处理领域的相关应用提供有力支持。
文章结构部分的内容可以如下所示:1.2 文章结构本文分为引言、正文和结论三部分。
- 引言部分介绍了边缘检测及拟合的相关概念和研究意义,并对文章的结构进行了概述。
- 正文部分包括了边缘检测和边缘拟合两个主要部分。
- 边缘检测部分主要介绍了边缘检测的概念、常用方法和应用领域。
- 边缘拟合部分主要介绍了边缘拟合的概念、拟合方法和实际应用。
- 边缘检测与拟合的关系部分探讨了二者之间的相互影响,以及如何综合应用边缘检测和拟合方法,并给出了拓展研究方向的建议。
Halcon应用之边缘检测
Halcon应用之边缘检测边缘检测的定义:使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。
边缘是指周围像素灰度有阶跃变化或屋顶等变化的那些像素的集合。
图像的边缘对应着图像灰度的不连续性。
显然图像的边缘很少是从一个灰度跳到另一个灰度这样的理想状况。
真实图像的边缘通常都具有有限的宽度,呈现出陡峭的斜坡状。
边缘的锐利程度由图像灰度的梯度决定,梯度是指灰度变化的最快的方向和数量。
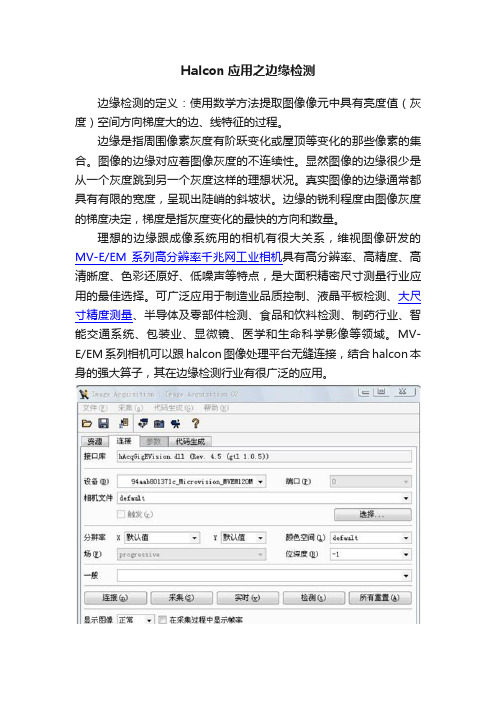
理想的边缘跟成像系统用的相机有很大关系,维视图像研发的MV-E/EM 系列高分辨率千兆网工业相机具有高分辨率、高精度、高清晰度、色彩还原好、低噪声等特点,是大面积精密尺寸测量行业应用的最佳选择。
可广泛应用于制造业品质控制、液晶平板检测、大尺寸精度测量、半导体及零部件检测、食品和饮料检测、制药行业、智能交通系统、包装业、显微镜、医学和生命科学影像等领域。
MV-E/EM系列相机可以跟halcon图像处理平台无缝连接,结合halcon本身的强大算子,其在边缘检测行业有很广泛的应用。
MV-EM120在halcon中的调用示意常见的边缘点有三种:第一种是阶梯形边缘(Step-edge),即从一个灰度到比它高好多的另一个灰度;第二种是屋顶型边缘(Roof-edge),它的灰度是慢慢增加到一定程度,然后慢慢减小;还有一种是线性边缘(Line-edge),它的灰度从一级别跳到另一个灰度级别之后,然后回来。
边缘检测的方法主要有以下几种:第一种是检测梯度的最大值。
由于边缘发生在图像灰度值变化比较大的地方,就是说函数梯度较大的地方,所以研究比较好的求导算子就成为一种思路。
Roberts算子、Prewit算子和Sobel算子等就是比较简单而常用的例子。
还有一种比较直观的方法就是利用当前像素邻域中的一些像素值拟合一个曲面,然后求这个连续曲面在当前像素处梯度。
从统计角度来说,我们可以通过回归分析得到一个曲面,然后也可以做类似的处理。
halcon间隙测量思路

halcon间隙测量思路Halcon间隙测量思路在机器视觉领域中,间隙测量是一个常见的任务,用于测量物体之间的间隙大小。
Halcon是一款常用的机器视觉软件,提供了多种方法和工具来进行间隙测量。
本文将介绍一种基于Halcon的间隙测量思路。
一、图像预处理在进行间隙测量之前,首先需要对图像进行预处理,以提高测量的准确性。
常用的预处理方法包括图像平滑、滤波和边缘增强等。
通过这些预处理步骤,可以减少图像中的噪声和干扰,使得后续的测量更加可靠。
二、边缘检测间隙测量通常是基于物体的边缘进行的。
在Halcon中,可以使用边缘检测算法来提取物体的边缘信息。
常用的边缘检测算法有Sobel算子、Canny算子等。
通过对图像进行边缘检测,可以得到物体的边缘轮廓。
三、边缘匹配在得到物体的边缘轮廓之后,需要对边缘进行匹配,以确定物体之间的间隙位置。
Halcon提供了多种边缘匹配算法,如形状匹配、模板匹配等。
通过选择合适的匹配算法,可以实现对边缘的精确匹配。
四、间隙测量通过边缘匹配,我们可以得到物体之间的边缘位置信息。
根据边缘的位置,可以计算出物体之间的间隙大小。
在Halcon中,可以使用测量工具来进行间隙的测量。
测量工具提供了多种测量方法,如距离测量、角度测量等。
根据实际情况,选择合适的测量方法进行间隙测量。
五、结果分析在完成间隙测量之后,需要对结果进行分析和判断。
根据测量结果,可以判断物体之间的间隙是否符合要求。
如果间隙大小超出了预期范围,可以进行相应的调整和控制。
基于Halcon的间隙测量思路主要包括图像预处理、边缘检测、边缘匹配、间隙测量和结果分析等步骤。
通过这些步骤的组合,可以实现对物体间隙的准确测量。
在实际应用中,还可以根据具体的需求进行调整和优化,以达到更好的测量效果。
Halcon提供了丰富的功能和工具,可以实现对间隙的准确测量。
通过合理的算法选择和参数设置,结合图像预处理和结果分析,可以得到准确可靠的间隙测量结果,为机器视觉应用提供了强大的支持。
halcon 目标检测 推理
一、概述目标检测是计算机视觉领域中的重要任务,它能够识别图像或视瓶中的特定目标并将其标记出来。
随着深度学习技术的发展,目标检测算法在准确性和效率上取得了显著的提升。
而在目标检测的过程中,推理的速度和准确性是至关重要的。
本文将重点介绍 Hn 目标检测推理的相关内容。
二、Halcon 目标检测简介1. Halcon 是一种集成了图像处理、分析和机器视觉功能的软件开发评台,它具有强大的图像处理能力和丰富的图像处理工具。
2. Halcon 的目标检测功能基于深度学习技术,可以进行识别、定位和标记图像中的目标,支持多种类型的目标。
其算法在高准确性的也具有较快的推理速度。
3. Halcon 提供了丰富的开发接口和文档支持,方便开发者进行二次开发和定制。
三、Halcon 目标检测推理介绍1. 推理是深度学习模型在实际应用中对输入数据进行处理并得出输出结果的过程,推理的速度和准确性直接影响着系统的实时性和可靠性。
2. Halcon 的目标检测推理算法通过对目标检测模型进行优化和加速,实现了较快的推理速度和较高的准确性。
其推理引擎能够充分利用硬件资源,提高推理效率。
3. Halcon 在目标检测推理过程中,能够实现多种场景下的实时推理,包括工业自动化、智能监控、无人驾驶等领域。
四、Halcon 目标检测推理的优势1. 高效性:Halcon 的推理算法能够充分利用硬件资源,实现较高的推理效率,满足实时性要求。
2. 精准度:Halcon 的目标检测推理具有较高的准确性,对于小目标和复杂场景也能够进行准确的检测。
3. 稳定性:Halcon 目标检测推理经过充分的测试和优化,具有较强的稳定性和可靠性,能够适应多种复杂环境。
4. 易用性:Halcon 提供了丰富的开发接口和文档支持,开发者可以快速上手,并进行定制化开发。
五、Halcon 目标检测推理的应用1. 工业自动化:Halcon 目标检测推理可以应用于生产线上的产品检测、质量控制等领域,实现自动化生产。
工业机器视觉基础教程-halcon篇
工业机器视觉基础教程-halcon篇工业机器视觉技术是近年来广泛应用于制造业、智能制造等领域的一项先进技术。
而Halcon(halcon软件)作为机器视觉领域的一个重要工具之一,为很多工厂和企业的生产提供了有力的支持。
以下是Halcon基础教程的一些内容:一、图像的基本处理1.图像读取和显示使用 HDevelop 进行图像读取和显示,首先需要打开 Halcon 的环境。
read_image (Image,"图片路径")Using HDevelop 进行图像显示dev_close_window ()dev_open_window (0,0,800,600,"image", "no_titlebar", "") dev_display (Image)2.图像的预处理图像的预处理指对原始图像进行一系列处理,以便于后续处理。
常见的预处理有图像灰度化、平滑化、二值化等。
a.灰度化:将RGB图像转换为灰度图象。
gray_image(Image,GrayImage)b.平滑化:对于物体在图像中可能产生的噪声,需对图像进行平滑化处理。
gauss_filter(Image,GaussImage,2)c.二值化:将灰度图产生为二值图,以便于后续的分析处理。
threshold(Image,Region,20,255)二、圆形和直线的基本检测1、圆形的检测a.使用梯度方向不变性(Gradient direction invariant)方法。
1) 对图像进行预处理,平滑和边缘检测。
gauss_filter(Image,Filtered,3)sobel_amp(Filtered,DerivGaussian,3)2) 选定圆心和半径的最小值和最大值,对圆进行扫描。
find_circles(FilteredCircles,DerivGaussian,MinRadius,Max Radius)3) 对于查找到的圆形和可能的重叠,消除重叠。
工业机器视觉基础教程-halcon篇
工业机器视觉基础教程-halcon篇
工业机器视觉是利用计算机视觉技术,通过各种相机、传感器等设备,实现对工业制造过程中产品的检测、识别、测量等操作,以提高生产效率和质量。
其中,Halcon 是一款商业化的
视觉软件,是基于面向对象编程思想和C++语言构建而成的
算法和应用开发平台。
Halcon 的特点之一是具有强大的图像处理函数库,可用于高
级图像处理和机器视觉应用的开发。
例如,常常用到的图像预处理(如滤波、抠图、滑动窗口等)、角点检测、边缘检测、二值化、形态学操作、直线/圆检测等操作。
此外,还有一些
高级操作,如三维重建、模板匹配、字符识别、色彩分割、基于深度学习的图像识别等。
使用 Halcon 进行机器视觉应用的第一步是了解其标定系统以
及相应的摄像机标定应用。
Halcon 通过利用多个视觉原理,
并结合了强大的2D/3D机器视觉算法和成像技术,能够实现
高精度的相机标定,并能够使用标定好的摄像机进行高效、准确的三维参数计算和分析。
此外,还需要针对具体的应用场景,对图像进行设计、预处理和分析,以得到最终的应用程序。
除此之外,还需要考虑实际工业现场的环境因素,例如光照、噪声、运动等因素对识别、测量的影响。
在这种情况下,可以使用 halcon 系统灵活的参数调整和自动化算法设计等技术,
来实现对产品的全方位分析、检测及检验,提高生产效益和质量。
总之,作为一款行业顶尖的机器视觉软件,Halcon 在应用于各种机器视觉应用方面都有良好的表现,并能帮助工程师快速高效地进行图像处理、算法设计,以及现场调试和优化案例。