西北工业大学机械原理课后答案第3章-1
《机械原理》第七版西北工业大学习题答案 特别全答案详解
题 2-8 图示为一刹车机构。刹车时,操作杆 1 向右拉,通过构件 2、3、4、5、6 使两闸瓦刹住车轮。试计 算机构的自由度,并就刹车过程说明此机构自由度的变化情况。(注:车轮不属于刹车机构中的构件。)
解:1)未刹车时,刹车机构的自由度
n 6 pl 8 ph 0
F 3n 2 pl ph 3 6 28 0 2
F 3n 2 pl ph 35 2 7 0 1
所设计的一种假肢膝关节机构,该机构能 为机架,
自由度,并作出大腿弯曲 90 度时的机构
简图。大腿弯曲 90 度时的机构运动简图
题 2-6 试计算如图所示各机构的自由度。图
a、d 为齿轮-连杆组合机构;图 b 为凸轮-连
杆组合机构(图中在 D 处为铰接在 题2-5
移动副。 解法一:
n 13 pl 17 ph 4
虚约束:
因为 AB BC CD AD ,4 和 5,6 和 7、8 和 9 为不影响机构传递运动的重复部分,与连杆 10、
11、12、13 所带入的约束为虚约束。机构可简化为图 2-7(b)
重复部分中的构件数 n 10 低副数 pl 17 高副数 ph 3 局部自由度 F 3
p5 3 p4 1 F 1
5
F 6 mn i mpi F 6 3 3 5 3p5 4 3p4 F 1 i m1
F0 6n ipi F 6 3 5 3 411 2 将平面高副改为空间高副,可消除虚约束。
题 2-10 图示为以内燃机的机构运动简图,试计算自由度,并分析组成此机构的基本杆组。如在该机构中 改选 EG 为原动件,试问组成此机构的基本杆组是否与前者不同。 解:1)计算此机构的自由度
p 2 pl ph 3n 2 17 3 310 3 4 局部自由度 F 4
西北工业大学机械原理课后答案第3章
答:
(1分) (1分)
Vc3=VB+VC3B=VC2+VC3C2(2分)
aC3=aB+anC3B+atC3B=aC2+akC3C2+arC3C2(3分)
VC2=0 aC2=0(2分)
VC3B=0 ω3=0 akC3C2=0(3分)
(b)
答:
(2分)
(2分)
VC2=VB+VC2B=VC3+Vc2C3(2分)
解:(1)以μl作机构运动简图如(a)所示。
(2)速度分斫:
此齿轮连杆机构可看作,ABCD受DCEF两个机构串联而成,则可写出:
vC=vB+vCB
vE=vC+vEC
以μv作速度多边形如图(b)所示.由图得
vE=μvpe m/S
取齿轮3与齿轮4的啮合点为k,根据速度影像原理,作△dck∽△DCK求得k点。然后分别以c,e为圆心,以ck.ek为半径作圆得圆g3和圆g4。圆g3代表齿轮3的速度影像,圆g4代表齿轮4的速度影像。
解1)以μl作机构运动简图.如图(a)。
2)利用瞬心多边形图(b)依次定出瞬心P36,P13.P15
vC=vP15=ω1AP15μl=1.24 m/S
3 -19图示齿轮一连杆组合机构中,MM为固定齿条,齿轮3的直径为齿轮4的2倍.设已知原动件1以等角速度ω1顺时针方向回转,试以图解法求机构在图示位置时E点的速度vE以及齿轮3,4的速度影像。
aD=μap`d`=0.6 4m/S2
aE=μap`e`=2.8m/s2
α2=atC2B/lBC=μan`2C`2/lBC=8.36rad/s2(顺时针) i
3- l5在图(a)示的机构中,已知lAE=70 mm,;lAB=40mm,lEF=60mm,
机械原理第八版课后练习答案(西工大版)(孙恒等)

齿轮 3、5 和齿条 7 与齿轮 5 的啮合高副所提供的约束数目不同,因为齿轮 3、5 处只有一个 高副,而齿条 7 与齿轮 5 在齿的两侧面均保持接触,故为两个高副。 2-13 图示为一新型偏心轮滑阎式真空泵。其偏心轮 1 绕固定轴心 A 转动,与外环 2 固连在一 起的滑阀 3 在可绕固定轴心 C 转动的圆柱 4 中滑动。当偏心轮按图示方向连续回转时可将设 备中的空气吸入,并将空气从阀 5 中排出,从而形成真空。(1)试绘制其机构运动简图;(2) 计算其自由度。
解:
f 37210 1 2-18 图示为一刹车机构。刹车时,操作杆 j 向右拉,通过构件 2、3、4、5、6 使两闸瓦刹住 车轮。试计算机构的自由度,并就刹车过程说明此机构自由度的变化情况。(注;车轮不属于 刹车机构中的构件。
(1)未刹车时,刹车机构的自由度 2)闸瓦 G、J 之一剃紧车轮时.刹车机构的自由度 3)闸瓦 G、J 同时刹紧车轮时,刹车机构的自由度
解:
1> f 3628 2
2> f 3527 1
3> f 3426 1
2-23 图示为一内然机的机构运动简图,试计算自由度 t 并分析组成此机构的基本杆组。如在 该机构中改选 EG 为原动件,试问组成此机构的基本杆组是否与前者有所不同。
解:
f 37210 1
2-21
图示为一收放式折叠支架机构。该支架中的件 1 和 5 分别用木螺钉连接于固定
收起(如图中双点划线所示)。现已知机构尺寸 lAB=lAD=90 mm;lBC=lCD=25 mm,其余尺寸
见图。试绘制该机构的运动简图,并计算其自由度。
解:机械运动简图如下:
F=3n-(2p1+pb-p`)-F`=3×5-(2×6+1-0)-1=1
机械原理第2、3、4、6章课后答案西北工业大学(第七版)

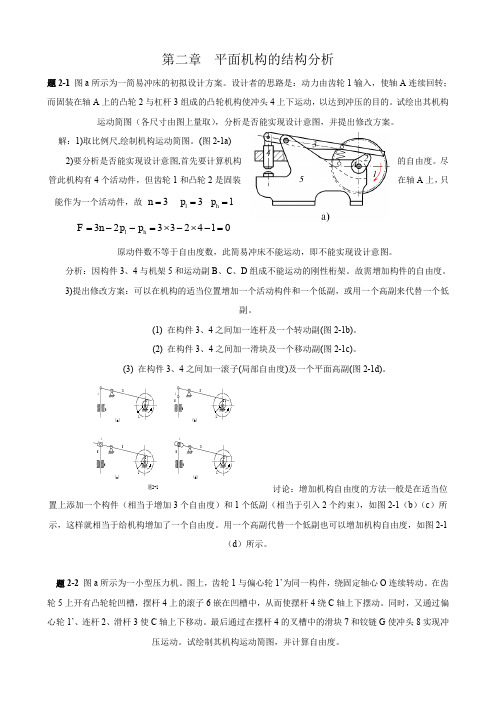
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)5364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
机械设计基础第三章(西北工业大学)

第三章机械零件的强度3-1 材料的疲劳特性§3-2 机械零件的疲劳强度计算§3-3 机械零件的抗断裂强度§3-4 机械零件的接触强度疲劳曲线机械零件的疲劳大多发生在s -N 曲线的CD 段,可用下式描述:)(D C m rN N N N C N ≤≤= s )D r rN N N >=∞ (s s D 点以后的疲劳曲线呈一水平线,代表着无限寿命区其方程为:由于N D 很大,所以在作疲劳试验时,常规定一个循环次数N 0(称为循环基数),用N 0及其相对应的疲劳极限σr 来近似代表N D 和σr∞,于是有:CN N ==0m rm rN s s 有限寿命区间内循环次数N 与疲劳极限s rN 的关系为:式中,s 、N 及m 的值由材料试验确定。
二、s -N 疲劳曲线m0r rN N N s s =0mrN r N N ⎪⎪⎭⎫ ⎝⎛=s s s -N 疲劳曲线详细说明极限应力线图三、等寿命疲劳曲线(极限应力线图)机械零件材料的疲劳特性除用s -N 曲线表示外,还可用等寿命曲线来描述。
该曲线表达了不同应力比时疲劳极限的特性。
在工程应用中,常将等寿命曲线用直线来近似替代。
用A 'G'C 折线表示零件材料的极限应力线图是其中一种近似方法。
A 'G'直线的方程为:m a1s ψs s s '+'=-s m as s s ='+'C G'直线的方程为:12s s s ψs -=-ψσ为试件受循环弯曲应力时的材料常数,其值由试验及下式决定:详细介绍对于碳钢,ψ≈0.1~0.2,对于合金钢,ψ≈0.2~0.3。
机械零件的疲劳强度计算1一、零件的极限应力线图由于零件几何形状的变化、尺寸大小、加工质量及强化因素等的影响,使得零件的疲劳极限要小于材料试件的疲劳极限。
以弯曲疲劳极限的综合影响系数Kσ表示材料对称循环弯曲疲劳极限σ-1与零件对称循环弯曲疲劳极限σ-1e 的比值,即e11--=s s s K 在不对称循环时,Kσ是试件与零件极限应力幅的比值。
机械原理第三章习题答案
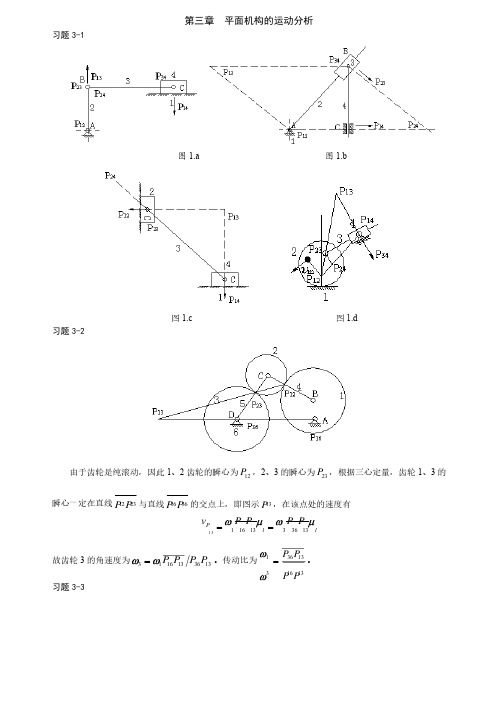
第三章平面机构的运动分析习题3-1 图1.a 图1.b 图1.c 图1.d 习题3-2 由于齿轮是纯滚动,因此1、2齿轮的瞬心为12P ,2、3的瞬心为23P ,根据三心定量,齿轮1、3的瞬心一定在直线2312P P与直线3616P P 的交点上,即图示13P ,在该点处的速度有ll P PP P P P v m w m w 133631316113==故齿轮3的角速度为1336131613P P P P w w =。
传动比为1316133631P P P P =w w 。
习题3-3答:1)三个瞬心中,14P、12P 为绝对瞬心,24P 为相对瞬心。
2)不利用其它的三个瞬心,因为它们全是相对瞬心。
3)构件2和4之间的转向关系可以根据瞬心24P 的瞬时绝对速度方向判断。
的瞬时绝对速度方向判断。
习题3-4取比例尺为mmm l 003.0=m ,作图如下,作图如下1) 由图上可知:l l P P P P P v m w m w 241442412224==,根据量得的长度,得,根据量得的长度,得s rad P P P P/455.414.72/14.32102414241224=´==w w 可计算出C 点的速度为:s m CD v l C /4.0003.030455.44=´´==m w2) 构件1、3的瞬心在点13P 处,且为绝对瞬心,因此构件3的角速度为的角速度为()s rad C P v l c /53.2)67.52003.0/(4.0133=´==mw 显然构件3上速度最小点在E 点,则其速度为点,则其速度为s m EP v l E /36.0003.04.4753.2133=´´==mw 3) 要使0=C v ,需瞬心12P 、24P 重合(如图),两位置分别为0126'=Ð=DAB j ,02227''=Ð=DAB j 。
机械原理第七版西北工业大学课后习题答(1-8章)
机械原理作业集答案详解 第二章平面机构的结构分析题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
机械原理_课后习题答案免费(全面)高教版 西北工大
2) 求vC2
v C 2 = v B + v C 2 B = v C 3 + vC 2 C 3
方向: 大小: ⊥AB
√
⊥BC ?
0 0
∥BC ?
取
μv = 0.005
m/s mm
作速度图
b
题3-10 解(续2)
[解] (2)速度分析
v B → vC 2 → v D , v E → ω 2
1) 求vB 2) 求vC2 3) 求vD 和求vE 用速度影像法
C
E
vC = v B + vCB v D = v B + v DB
(2) 求vE
D p(a, f )
v E = vC + v EC = v D + v ED
b d e c
题3-5 解
b) 解: 顺序 (1) 求vC
v B → vC → v E → v F
D B vB A E G F C
vC = v B + vCB
√
0 0
∥CD ?
b2 (b1) (b3)
其中 a B3B2 = 2ω2 v B3B2 = 0(∵ v B3B2 = 0)
a B1 ⎛ m / s 2 ⎞ 取 μa = ⎜ ⎟ 作加速度图 p ' b '1 ⎝ mm ⎠
题3-8 c) 解(续2)
[解] (3)加速度分析 a B 2 ( = a B1 ) → a B 3 → a C 3 1) 求aB2 A 1 ω1 2) 求aB3
取
√ v ⎛m/s⎞ μ v = B1 ⎜ ⎟ 作速度图 pb1 ⎝ mm ⎠
3) 求vC3 : 用速度影像法
v C 3 = 0 同时可求得 ω3 =
西工大版机械原理第3章
1 2
1
2 A(A1A2)
VA2、VA1为两构件上A点的绝对速度,VA2A1为相对速度
VA2A1方向为平行于导路方向。
(2)加速度分析
r aA2 aA1 ak a A2 A1 A2 A1
1 2
aA2、aA1为两构件上A点的绝对加速度
科氏加速度: a k A2 A1 21VA2 A1, 方向为将相对速度VA2 A1沿1转过90
大小 方向
? ⊥C P14 ?
?
⊥AB ⊥BC
vS 4 vC vS 4C vE vS 4 E
vS 4 vB vCB vS 4C vE vS 4 E
大小 方向
(1)用瞬心法确定C点方向
⊥AB
?
⊥CB
?
⊥SE
借助速度瞬心法
VC ?
= VB
+ VCB
P36 E • C G 3 5 A D 2 1 4 F B 6 即:VS3 = VB
vK 3 vK 2 2lOK
(2)用影像原理求vB
⊥OK
vC vB vCB
vB v pb
vC v pc 6 lCD lCD
例 3 – 3 图示为6杆(Ⅲ级)机构,已知2 ,作速度多边形
d
c p
b (2)利用特殊点S减少未知量
S
p14
e
vC vB vCB
n t k r aB3 aB 3 aB3 aB2 aB3B2 aB3B2
大小: 方向:
2 3 lBC
?
⊥BC
2 1 l AB
23VB3B 2
?
' ' b( ) 2 b1
机械设计(第八版)课后习题答案(最新,参考答案)
3到13章答案 免费下载 0财富值西北工业大学机械原理及机械零件教研室 编著第三章 机械零件的强度习题答案3-1某材料的对称循环弯曲疲劳极限MPa 1801=-ζ,取循环基数60105⨯=N ,9=m ,试求循环次数N 分别为7 000、25 000、620 000次时的有限寿命弯曲疲劳极限。
[解] MPa 6.373107105180936910111=⨯⨯⨯==--N N ζζNM P a 3.324105.2105180946920112=⨯⨯⨯==--N N ζζNM P a 0.227102.6105180956930113=⨯⨯⨯==--N N ζζN3-2已知材料的力学性能为MPa 260=s ζ,MPa 1701=-ζ,2.0=ζΦ,试绘制此材料的简化的等寿命寿命曲线。
[解] )170,0('A )0,260(C 0012ζζζΦζ-=-ζΦζζ+=∴-1210M P a 33.2832.0117021210=+⨯=+=∴-ζΦζζ得)233.283,233.283(D ',即)67.141,67.141(D '根据点)170,0('A ,)0,260(C ,)67.141,67.141(D '按比例绘制该材料的极限应力图如下图所示3-4 圆轴轴肩处的尺寸为:D =72mm ,d =62mm ,r =3mm 。
如用题3-2中的材料,设其强度极限σB =420MPa ,精车,弯曲,βq =1,试绘制此零件的简化等寿命疲劳曲线。
[解] 因2.14554==d D ,067.0453==d r ,查附表3-2,插值得88.1=αζ,查附图3-1得78.0≈ζq ,将所查值代入公式,即()()69.1188.178.0111k =-⨯+=-α+=ζζζq查附图3-2,得75.0=ζε;按精车加工工艺,查附图3-4,得91.0=ζβ,已知1=q β,则 35.211191.0175.069.1111k =⨯⎪⎭⎫ ⎝⎛-+=⎪⎪⎭⎫ ⎝⎛-+=q ζζζζββεK ()()()35.267.141,67.141,0,260,35.2170,0D C A ∴根据()()()29.60,67.141,0,260,34.72,0D C A 按比例绘出该零件的极限应力线图如下图3-5 如题3-4中危险截面上的平均应力MPa 20m =ζ,应力幅MPa 20a =ζ,试分别按①C r =②C ζ=m ,求出该截面的计算安全系数ca S 。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
解法一:
速度分析:先确定构件3得绝对瞬心P36,利用瞬心多边形,如图(b)
由构件3、5、6组成得三角形中,瞬心P36、P35、P56必在一条直线上,由构件3、4、6组成得三角形中,瞬心P36、P34、P46也必在一条直线上,二直线得交点即为绝对瞬心P36。
第三章平面机构得运动分析
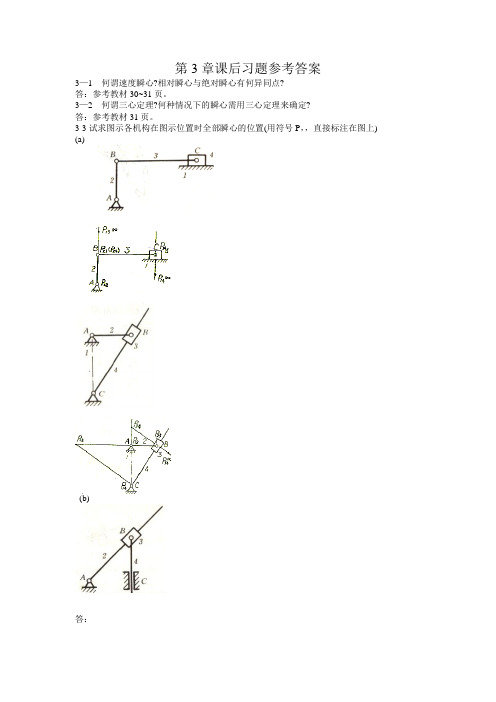
题33试求图示各机构在图示位置时全部瞬心得位置(用符号Pij直接标注在图上)
解:
题34在图示在齿轮连杆机构中,试用瞬心法求齿轮1与齿轮3得传动比w1/w3、
解:1)计算此机构所有瞬心得数目
2)为求传动比需求出如下三个瞬心、、如图32所示。
3)传动比计算公式为:
题36在图a所示得四杆机构中,lAB=60mm,lCD=90mm,lAD=lBC=120mm,ω2=10rad/s,试用瞬心法求:
解:1)速度分析:
以F为重合点(F1、F5、、F4)有速度方程:
以比例尺速度多边形如图37 (b),由速度影像法求出VB、VD
2)加速度分析:以比例尺
有加速度方程:由加速度影像法求出aB、aD
题316在图示得凸轮机构中,已知凸抡1以等角速度转动,凸轮为一偏心圆,其半径,试用图解法求构件2得角速度与角加速度。
4)当时,P13与C点重合,即AB与BC共线有两个位置。作出得两个位置。
量得
题312在图示得各机构中,设已知各构件得尺寸、原动件1以等角速度ω1顺时针方向转动。试用图解法求机构在图示位置时构件3上C点得速度及加速度。
解:a)速度方程:
加速度方程:
b)速度方程:
加速度方程:
c)速度方程:
加速度方程:
题314在图示得摇块机构中,已知lAB=30mm,lAC=100mm,lBD=50mm,lDE=40mm。曲柄以等角速度ω1=10rad/s回转,试用图解法求机构在φ1=45°位置时,点D与点E得速度与加速度,以及构件2得角速度与角加速度。
解:1)高副低代,以选定比例尺,绘制机构运动简图。
2)速度分析:图(b)
取B4、、B2
为重合点。
速度方程:
速度多边形如图(b)
转向逆时针
3)加速度分析:图(c)
转向顺时针。
题318在图a所示得牛头刨床机构中,h=800mm,h1=360mm,h2=120mm,lAB=200mm,lCD=960mm,lDE=160mm,设曲柄以等角速度ω1=5rad/s逆时针方向回转,试用图解法求机构在φ1=135°位置时,刨头上点C得速度Vc。
速度方程
方向垂直AB。
VB3得方向垂直BG(BP36),VB3B2得方向平行BD。速度多边形如图(c)
速度方程
解法二:
确定构件3得绝对瞬心P36后,再确定有关瞬心P16、P12、P23、P13、P15,利用瞬心多边形,如图39(d)由构件1、2、3组成得三角形中,瞬心P12、P23、P13必在一条直线上,由构件1、3、6组成得三角形中,瞬心P36、P16、P13也必在一条直线上,二直线得交点即为瞬心P13。
两切刀E与E’同时剪切钢带时, E与E’重合,由机构运动简图可得2)速度分析:速度方程:由速度影像
3)VE必须与V5同步才能剪切钢带。
加速度方程:
题321图a所示为一汽车雨刷机构。其构件1绕固定轴心A转动,齿条2与构件1在B点处铰接,并与绕固定轴心D转动得齿轮3啮合(滚子5用来保证两者始终啮合),固联于轮3得雨刷3作往复摆动。设机构得尺寸为lAB=18mm,;轮3得分度圆半径r3=lCD=12mm,原动件1以等角速度ω1=1rad/s顺时针回转,试以图解法确定雨刷得摆程角与图示位置时雨刷得角速度。
1)当φ=165°时,点C得速度Vc;
2)当φ=165°时,构件3得BC线上速度最小得一点E得位置及速度得大小;
3)当Vc=0时,φ角之值(有两个解),定出瞬心P13得位置。如图33(a)
3)定出构件3得BC线上速度最小得点E得位置。
因为BC线上速度最小得点必与P13点得距离最近,所以过P13点引BC线延长线得垂线交于E点。如图33(a)
利用瞬心多边形,如图39(e)由构件1、3、5组成得三角形中,瞬心P15、P13、P35必在一条直线上,由构件1、5、6组成得三角形中,瞬心P56、P16、P15也必在一条直线上,二直线得交点即为瞬心P15。
如图39 (a) P15为构件1、5得瞬时等速重合点
题319在图示得齿轮连杆组合机构中,MM为固定齿条,齿轮3得齿数为齿轮4得2倍,设已知原动件1以等角速度ω1顺时针方向回转,试以图解法求机构在图示位置时,E点得速度VE以及齿轮3、4得速度影像。
解: 1)选定比例尺,绘制机构运动简图。
在图中作出齿条2与齿轮3啮合摆动时占据得两个极限位置C′与C″,可得摆程角
解:1)选定比例尺绘制机构运动简图。(图(a))
2)速度分析:
此齿轮连杆机构可瞧成ABCD及DCEF两个机构串联而成。则
速度方程:
以比例尺作速度多边形,如图(b)
取齿轮3与齿轮4得啮合点为K,根据速度影像原理,在速度图(b)中作
,求出k点,以c为圆心,以ck为半径作圆g3即为齿轮3得速度影像。同理,以e为圆心,以ek为半径作圆g4即为齿轮4得速度影像。
解: 1)选定比例尺,绘制机构运动简图。(图(a))
2)速度分析:图(b)
速度方程
由速度影像法求出VE速度多边形如图36 (b)
(顺时针)
3)加速度分析:图36(c)
由加速度影像法求出aE加速度多边形如图(c)
(顺时针)
题315在图示得机构中,已知lAE=70mm,lAB=40mm,lEF=60mm,lDE=35mm,lCD=75mm,lBC=50mm,原动件1以等角速度ω1=10rad/s回转,试以图解法求点C在φ1=50°时得速度Vc与加速度ac。
题320如图a所示得摆动式飞剪机用于剪切连续运动中得钢带。设机构得尺寸为lAB=130mm,lBC=340mm,lCD=800mm。试确定剪床相对钢带得安装高度H(两切刀E及E`应同时开始剪切钢带5);若钢带5以速度V5=0、5m/s送进时,求曲柄1得角速度ω1应为多少才能同步剪切?
解:1)选定比例尺,绘制机构运动简图。