单向扫描调度算法
操作系统期末复习
操作系统练习题1.设计分时操作系统的主要目标是()A.吞吐量和周转时间B.交互性和响应时间C.灵活性和可适应性D.可靠性和完整性2()的操作应该只在核心态下执行?A.求三角函数的值B.改变文件内容 C.读时钟日期 D.屏蔽所有中断3当一个进程()就要退出等待队列而进入就绪队列。
A.启动了外设B.用完了规定的时间片C.获得了所等待的资源D.能得到所等待的处理器4采用多道程序设计能()A..增加平均周转时间B.发挥且提高并行工作能力C.缩短每道程序执行时间D.降低对处理器调度的要求5程序状态字反映了()状态。
A.进程调度B.作业调度C.与处理器有关的系统D.主存储器分配6.存储管理中地址重定位必须在CPU中设置专门寄存器,而()不是此类寄存器。
A.基址寄存器B.界限寄存器 C.页表控制寄存器D.程序计数器7.在段式分配的存储管理中,最坏适应算法要求对空闲区表项按()进行排列。
A.尺寸从小到大B.尺寸从大到小C.地址从小到大D.地址从大到小8.段式存储管理中的地址格式是()地址。
A.二维 B.一维 C.线性D.三维9.记录的成组与分解操作不仅提高()的利用率,而且可减少对存储设备的启动次数。
A.主存空间B.存储介质C.处理器 D.共享文件10.用户要求把一个新文件存放到存储介质上时,首先要使用()文件操作,目的是让系统做好存储文件前的准备工作。
A.打开B.建立 C.关闭D.删除11.磁盘上的每一个物理块要用三个参数来定位,首先要把移动臂移动并定位到不同盘面上具有相同编号的磁道位置,表示该位置的参数称()号。
A.柱面B.盘面 C.扇区 D.磁头12.下列程序中()程序不是spool系统的组成部分。
A.预输入B.缓输出C.通道D.井管理13.用户可以使用()编写控制作业执行步骤的作业说明书。
A.操作控制命令B.作业控制语言C.作业启动命令D.窗口或菜单14.计算时间短的作业优先的调度算法会使()A.每个作业等待时间较短B.平均周转时间最短C.系统效率最高 D.长作业等待时间较短15.涉及某一资源造成与时间有关的错误的原因,正确的是() A.一个进程多次申请,释放该资B.若干并发进程互斥使用该资源C.若干并发进程同时使用该资源D.以上说法均不对16作业由输入状态转变为收容状态,是由()程序完成的。
磁盘调度单向扫描
上机实验报告一、实验题目:磁盘调度的单向扫描算法二、实验目的:按找单向扫描算法实现磁盘的调度,计算磁盘的调度序列和磁头移动的磁道数三、实验要求:(1)用键盘输入磁头所在磁道数和所需调度的磁道数。
(2)将所给磁道数从小到大排列(3)计算出磁头的调度序列和磁头划过的磁道数。
四、程序源代码:/* Note:Your choice is C IDE */# define N 9#include "stdio.h"void main(){int i,j,a[N],n;int temp,m,c;printf("输入磁道数,磁头的位置放在最前面:\n");for(i=0;i<N;i++)scanf("%d",&a[i]);m=a[0];printf("磁头开始放在第%d磁道上:\n",a[0]);printf("需要访问的磁道数为:\n");for(i=1;i<N;i++)printf("%d ",a[i]);for(i=0;i<N-1;i++)for(j=i+1;j<N;j++)if(a[i]>a[j]){temp=a[i];a[i]=a[j];a[j]=temp;}printf("\n将磁道从小到大顺序排列:\n");for(i=0;i<N;i++)printf("%d ",a[i]);printf("\n采用单项扫描算法进行查找:\n");for(i=0;i<N;i++)if(a[i]==m)c=i;else ;n=a[N-1]-m;for(i=c;i<N;i++)printf("%d ",a[i]);printf("(快速返回到0磁道) ");i=0;for(i=0;i<c;i++)printf("%d ",a[i]);n=n+a[c-1];printf("\n磁头划过的磁道数为:%d",n); }五、程序完成情况:执行结果图为:。
2014操作系统复习题(含答案)
2013操作系统复习资料一、单项选择题1.影响分时系统响应时间的是(D)A.每个应用进程分配的时间片长度B.进程大小C.就绪进程数目D.就绪进程数目和时间片长度2.计算机系统中设置的访管指令(a )A.只能在目态执行B.只能在管态执行C.既可在目态又可在管态执行D.在目态和管态下都不能执行3.原语应是(C)A.操作系统中的一个函数B.操作系统中的一个过程C.操作系统中的一个执行不可中断的过程D.操作系统中的一个执行可中断的函数4.以下属于可变分区常用主存分配算法的是(A )A. 最优适应B. 最快适应C.最大适应D.最长适应5.通常,用户进程被建立后(B)A.便一直存在于系统中,直到被操作人员撤消B.随着程序运行正常或异常结束而撤消C.随着时间片轮转而撤消与建立D.随着进程的阻塞或唤醒而撤消与建立6.在页式虚拟存储管理中,为实现地址变换,应建立(C)A.空闲区表B.分区分配表C.页表D.移动表7.7. SPOOL技术用于( C )A. 处理器管理B. 存储管理C. 设备管理D. 文件管理8.在可变分区分配方案中,在空闲区表中以空闲区长度按递减顺序排列适合于( A )A.最坏适应算法B.最先适应算法C.最优适应算法D.首次循环适应算法9.用户程序发出磁盘I/O请求后,系统的正确处理流程是(B )A.用户程序→系统调用处理程序→中断处理程序→设备驱动程序B.用户程序→系统调用处理程序→设备驱动程序→中断处理程序C.用户程序→设备驱动程序→系统调用处理程序→中断处理程序D.用户程序→设备驱动程序→中断处理程序→系统调用处理程序10.对特权指令、系统调用和访管指令有关描述正确的是( B )A.“启动I/O”不是特权指令B.修改“基址寄存器”和“限长寄存器”的指令是特权指令C.“访管指令”是在管态下执行的指令D.“系统调用”是在目态下执行的程序11.从磁盘读取数据的下列时间中,对系统效率影响最大的是( D )A.处理时间B.传输时间C.延迟时间D.寻道时间12.以下关于进程的并发执行描述正确的是(A)A.多个进程在某个时间段内轮流占用处理器执行B.多个进程在某个时刻同时占用处理器执行C.单处理器的系统也允许进程并发执行D.只有多处理器的系统才能允许进程并发执行13.造成某进程状态从就绪态转变成运行态的原因是(D )A.上次分配给该进程的处理器时间太短B.有更高优先级的进程要运行C.该进程需要更多的处理器时间运行D.该进程被进程调度程序选中14.逻辑文件必须存放在连续存储空间中的存储结构有(B )A.链接结构B.顺序结构C.索引结构D.流式结构15.文件系统与什么密切相关,它们共同为用户使用文件提供方便(C)A.处理器管理B.存储管理C.设备管理D.作业管理16.页式存储管理采用的装入作业方式是(B )A.静态重定位B.动态重定位C.静态和动态重定位D.以上都不是17.以下存储管理技术中,可以实现虚拟存储器的技术是( D )A.单用户连续存储管理B.固定分区存储管理C.可变分区存储管理D.页式存储管理18.PCB全称(B)A.进程队列B.进程控制块C.进程状态D.进程对象19.从用户观点看,文件系统的主要目的是(A)A.实现对文件的按名存取B.实现虚拟存储C.提高外存的读写速度D.用于存储系统文件20.对文件的存取方式有关描述正确的是( A )A.顺序结构文件可以随机存取B.链式结构文件采用随机存取是高效的C.索引结构文件不能顺序存取D.链式结构文件可以顺序存取21.计算机系统能及时处理由过程控制反馈的数据,并做出响应的操作系统是(B )A. 批处理操作系统B. 实时操作系统C. 分时操作系统D. 多处理机操作系统22.有关原语的说法中正确的是(B )A. 原语是不可中断执行的用户过程B. 原语是不可中断执行的操作系统过程C. 原语是可中断执行的用户过程D. 原语是可中断执行的操作系统过程23.操作系统在计算机系统中处于哪些之间的位置(B)A. 计算机硬件和软件B. 计算机硬件和用户C. 处理机和用户D. 外部设备和处理机24.在多道程序设计技术的计算机系统中,中央处理器(C )A.只能被一个程序占用B.可以被多个程序同时占用C.可以被多个程序交替占用D.可以被操作系统和另一个程序同时占用25.某进程所要求的一次打印输出结束,该进程被唤醒,其进程状态将从(B )A. 就绪状态到运行状态B. 等待状态到就绪状态C. 运行状态到等待状态D. 运行状态到就绪状态26.在以下的存储管理方案中,能扩充主存容量的是(D)A. 固定式分区分配B. 可变式分区分配C. 页式存储管理D. 分页虚拟存储管理27.内存分配的最佳适应算法的空闲区表是(B )A. 按大小递减顺序排列B. 按大小递增顺序排列C. 按地址由小到大排列D. 按地址由大到小排列28.对磁盘进行移臂调度的目的是为了缩短( A )A. 寻道时间B. 延迟时间C. 传送时间D. 启动时间29.对顺序文件做读文件操作时,总是从哪里按顺序读出信息(A )A.从文件头部向后B.文件尾部向前C.文件中部开始D.当前位置开始30.作业调度选择一个作业装入主存后,该作业能否占用处理器必须决定于(D )A.设备管理B.作业控制C.驱动调度D.进程调度31.关闭文件的作用是( A )A.向系统归还文件使用权B.将文件从磁盘删除C.不允许文件被任何人打开D.收回文件占用的磁盘存储空间32.以下说法错误的是(D)A.并发进程中与共享变量有关的程序段称为临界区B.并发进程中涉及到相同变量的程序段称为相关临界区C.临界区的引入主要是为了解决并发进程执行时出现与时间有关的错误D.所有并发进程都会产生与时间有关的错误33.硬件采用了中断和通道技术的目的是(a )A.使得CPU速度提高B.使得CPU与外设能并行工作C.使得外设速度提高D.使得CPU与外设能紧密结合34.系统在接到用户哪种文件操作命令后,就在文件目录中寻找空目录项进行登记(A )A. 建立B. 打开C. 读D. 写35.死锁的防止措施的实现依据是( C )A. 配置足够的系统资源B. 使进程的推进顺序合理C. 破坏产生死锁的四个必要条件之一D. 防止系统进入不安全状态36.下列文件物理结构中,适合随机访问且易于文件扩展的是(B)A. 连续结构B. 索引结构C. 链式结构且磁盘块定长D. 链式结构且磁盘块变长37.用户要求计算机处理的一个计算问题称为一个(B)A. 程序B. 作业C. 进程D. 系统调度38.系统出现死锁的根本原因是(D)A. 作业调度不当B. 系统中进程太多C. 资源的独占性D. 资源管理和进程推进顺序都不得当39.一种既有利于短小作业又兼顾到长作业的作业调度算法是(B )A. 先来先服务B.最高响应比优先C.轮转D.均衡调度40.按文件的物理组织结构可将文件分成(C)A. 数据文件,命令文件,文本文件B. 命令文件,库文件,索引文件C. 顺序文件,链式文件,索引文件D. 输入文件,输出文件,随机文件41.计算机操作系统的功能是(D)A.把源程序代码转换为目标代码B.实现计算机用户之间的相互交流C.完成计算机硬件与软件之间的转换D.控制、管理计算机系统的资源和程序的执行42.特权指令(B)A. 只能在目态下执行B. 只能在管态下执行C. 在目态或管态下均能执行D. 在目态或管态下均不能执行43.多道程序设计是指(C)A. 在多台处理机上同时执行多道程序B. 在多台处理机上同一时刻执行多道程序C. 在一台处理机上同时执行多道程序D. 在一台处理机上同一时刻执行多道程序44.有关进程的下列叙述中正确的是( D )A. 进程是静态的文本B. 进程与程序是一一对应的C. 进程与作业是一一对应的D. 多个进程可以在单个CPU上同时执行45.以下属于程序性中断的是(C)A.执行访管指令B.电源断电C.除数为0D.打印机未找到46.有甲、乙两道算题,每道需执行1小时(其中处理器的工作时间为12分钟)。
操作系统-第8章练习题
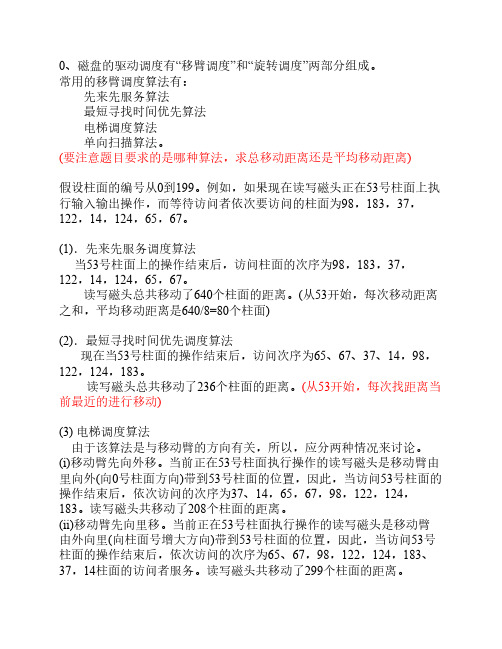
0、磁盘的驱动调度有“移臂调度”和“旋转调度”两部分组成。
常用的移臂调度算法有:先来先服务算法最短寻找时间优先算法电梯调度算法单向扫描算法。
(要注意题目要求的是哪种算法,求总移动距离还是平均移动距离)假设柱面的编号从0到199。
例如,如果现在读写磁头正在53号柱面上执行输入输出操作,而等待访问者依次要访问的柱面为98,183,37,122,14,124,65,67。
(1).先来先服务调度算法当53号柱面上的操作结束后,访问柱面的次序为98,183,37,122,14,124,65,67。
读写磁头总共移动了640个柱面的距离。
(从53开始,每次移动距离之和,平均移动距离是640/8=80个柱面)(2).最短寻找时间优先调度算法现在当53号柱面的操作结束后,访问次序为65、67、37、14,98,122,124,183。
读写磁头总共移动了236个柱面的距离。
(从53开始,每次找距离当前最近的进行移动)(3) 电梯调度算法由于该算法是与移动臂的方向有关,所以,应分两种情况来讨论。
(i)移动臂先向外移。
当前正在53号柱面执行操作的读写磁头是移动臂由里向外(向0号柱面方向)带到53号柱面的位置,因此,当访问53号柱面的操作结束后,依次访问的次序为37、14,65,67,98,122,124,183。
读写磁头共移动了208个柱面的距离。
(ii)移动臂先向里移。
当前正在53号柱面执行操作的读写磁头是移动臂由外向里(向柱面号增大方向)带到53号柱面的位置,因此,当访问53号柱面的操作结束后,依次访问的次序为65、67,98,122,124,183、37,14柱面的访问者服务。
读写磁头共移动了299个柱面的距离。
(总之象电梯一样,移动一个来回完成所有访问)(4).单向扫描调度算法1. 一个磁盘组有100个柱面,每柱面8个磁道,每磁道8个扇区,现有一个文件含5000个记录,每记录与扇区大小相等,在磁盘组上顺序存放(从0面0道0扇区开始),问(1)第3468个记录的物理位置(2)第56个柱面上第7磁道第5扇区对应的块号。
操作系统期末复习(南京工业大学)
4.某系统采用段页式存储管理,其逻辑地址结构和某作业的段表、页表 结构如下图所示。请计算该作业中逻辑地址135468对应的物理地址 (用十进制表示)。 段表 0 1 2
3
0段页表 0 1 2 5 7 8
1段页表 0 1 2 3 6 9
2段页表 0 1 2 10 4 15
8位 S
4位 P
12位 W 逻辑地址结构
则并发执行进程P0和P1时产生的情形是 。(2010全国试题) A.不能保证进程互斥进入临界区,会出现“饿死”现象
B.不能保证进程互斥进入临界区,不会出现“饿死”现象 C.能保证进程互斥进入临界区,会出现“饿死”现象 D.(1)
1.有两个作业A和B,分别在7:00和8:30到达系统,它们估计的计算时间 分别为0.8小时和0.1小时,系统在9:00开始以响应比高者优先算法进 行调度。在单道系统中该两个作业被选中时的响应比各为多少? 2.有一个具有两道作业的批处理系统(最多可有两道作业同时装入内存 执行),作业调度采用计算时间短的作业优先调度算法,进程调度采 用以优先数为基础的抢占式调度算法,今有如下作业序列(表中所列 作业优先数即为进程优先数,数值越小优先级越高): 作业名 到达时间 估计运行时 优先数 间 J1 J2 J3 J4 10 : 10 10 : 20 10 : 30 10 : 50 20分钟 30分钟 25分钟 20分钟 5 3 4 6
作业1——进程同步(1)
1.设有n个进程使用同一个共享变量,如果最多允许m(m < n)个进程 同时进入相关临界区,则信号量的变化范围是 。 A. n,n-1,...,n-m B. m,m-1,...1,0,-1,...m-n C. m,m-1,...1,0,-1,...m-n-1 D. m,m-1,...1,0,-1,...m-n+1 2.对于有两个并发进程的系统,设互斥信号量为mutex,若mutex=0, 则 。 A. 表示没有进程进入与mutex相关的临界区 B. 表示有一个进程进入与mutex相关的临界区 C. 表示有一个进程进入与mutex相关的临界区,另一个进程等待进入 D.表示有两个进程进入与mutex相关的临界区 3.S.queue,S.value是信号灯S的两个组成部分,当S.queue为空时, S.value的值是 。 A.S.value≤0 B.S.value=0 C.S.value=1 D. Svalue≥0 4.如果信号量的当前值为-3,则表示系统中在该信号量上有 进程。 5.下列选项中,操作系统提供给应用程序的接口是 试题) A.系统调用 B.中断 C.库函数 D.原语 6.下列选项中,导致创建新进程的操作是 I.用户登录成功 II.设备分配 A.仅I和II B.仅II和III C.仅I和III 个等待
调度算法OS
调度算法OS调度算法(OS)2011-04-05 20:59处理机调度的分级高级、中级和低级调度作业从提交开始直到完成,往往要经历下述三级调度:高级调度:(High-Level Scheduling)又称为作业调度,它决定把后备作业调入内存运行;低级调度:(Low-Level Scheduling)又称为进程调度,它决定把就绪队列的某进程获得CPU;中级调度:(Intermediate-Level Scheduling)又称为在虚拟存储器中引入,在内、外存对换区进行进程对换。
1.进程调度算法(处理器管理)A).先来先服务和短作业(进程)优先调度算法B).高优先权优先调度算法C).基于时间片的轮转调度算法2.作业调度算法2)短作业优先法SJF、3)最高响应比优先法HRN、4定时轮转法和优先数法3.移臂(磁盘)调度算法(设备管理根本目的在于有效利用磁盘,保证磁盘的快速访问)1)先来先服务算法;(根据访问者提出访问请求的先后次序来决定执行次序。
)2)最短寻找时间优先调度算法;(从等待的访问者中挑选寻找时间最短的那个请求执行,而不管访问者的先后次序。
)3)电梯4)单向扫描4.页式调度算法(存储器管理)1先进先出调度算法2最近最少调度算法3最近最不常用调度算法/////////////////////////////调度算法是指:根据系统的资源分配策略所规定的资源分配算法。
进程调度算法(处理器管理)一、先来先服务和短作业(进程)优先调度算法1.先来先服务调度算法先来先服务(FCFS)调度算法是一种最简单的调度算法,该算法既可用于作业调度,也可用于进程调度。
FCFS算法比较有利于长作业(进程),而不利于短作业(进程)。
由此可知,本算法适合于CPU繁忙型作业,而不利于I/O繁忙型的作业(进程)。
2.短作业(进程)优先调度算法短作业(进程)优先调度算法(SJ/PF)是指对短作业或短进程优先调度的算法,该算法既可用于作业调度,也可用于进程调度。
电梯优先调度算法
电梯优先调度算法电梯调度算法(ms InterView)移臂调度算法包括以下四种:1)先来先服务算法:根据访问者提出访问请求的先后次序来决定执行次序。
2)最短寻找时间优先调度算法:从等待的访问者中挑选寻找时间最短的那个请求执行,而不管访问者的先后次序。
3)电梯调度扫描算法:从移动臂当前位置沿移动方向选择最近的那个柱面的访问者来执行,若该方向上无请求访问时,就改变移动方向再选择。
4)单向扫描调度算法:从0柱面开始往里单向扫描,扫到哪个执行哪个。
*/// t1.cpp : 定义控制台应用程序的入口点。
//#include "stdafx.h"#include"math.h"#include"stdlib.h"#include"string.h"struct Head{int nPosition;bool bVisited;};void Visit(struct Head *pHead){printf("visite cy:%d\n",pHead->nPosition); pHead->bVisited=true;}int ReadInputKeyboard(struct Head *pHead,int *pCurrentPosition,int nMaxNumber){int i;printf("please input Current position:");scanf("%d",pCurrentPosition);printf("please input will visit position:");for(i=0;i<nMaxNumber;i++){scanf("%d",&pHead[i].nPosition);pHead[i].bVisited=false;if(pHead[i].nPosition<0)break;}return i;}int ReadInputFile(struct Head *pHead,int *pCurrentPosition,int nMaxNumber){int i;char szFileName[256],*q,*p,szTemp[20];printf("please input filename:");scanf("%s",szFileName);FILE *pFile=fopen(szFileName,"r");if(pFile==NULL){printf("open file %s error",szFileName); return -1;}for(i=0;!feof(pFile) &&i<nMaxNumber;) {p=szFileName;fgets(p,256,pFile);while(q=strchr(p,',')){memset(szTemp,0,sizeof(szTemp)*sizeof(char)); strncpy(szTemp,p,q-p);p=q+1;if(i==0)*pCurrentPosition=atoi(szTemp);else{pHead[i-1].nPosition=atoi(szTemp);pHead[i-1].bVisited=false;}i++;}memset(szTemp,0,sizeof(szTemp)*sizeof(char));pHead[i-1].nPosition=atoi(p);pHead[i-1].bVisited=false;//i++;}fclose(pFile);return i;}int FifoVisit(int nCurrentPosition,struct Head *pHead,int nNumber) {//先来先服务int nHaveVisited=0;int nMoveDistance=0;int i;while(nHaveVisited<nNumber){for(i=0;i<nNumber;i++){if(pHead[i].bVisited)continue;Visit(&pHead[i]);nHaveVisited++;nMoveDistance+=abs(nCurrentPosition-pHead[i].nPosition); nCurrentPosition=pHead[i].nPosition;}}printf("the sum of move distance:%d\n",nMoveDistance); return nMoveDistance;}int SsfoVisit(int nCurrentPosition,struct Head *pHead,int nNumber) {// 最短寻找时间优先int nHaveVisited=0;int nMoveDistance=0;int nMinDistance=0;int nMinIndex=0;int i;while(nHaveVisited<nNumber){nMinDistance=0xffff;nMinIndex=0;//找最小值for(i=0;i<nNumber;i++){if(pHead[i].bVisited)continue;if(nMinDistance>abs(pHead[i].nPosition-nCurrentPosition)) {nMinDistance=abs(pHead[i].nPosition-nCurrentPosition); nMinIndex=i;}//访问Visit(&pHead[nMinIndex]);nHaveVisited++;nMoveDistance+=nMinDistance;nCurrentPosition=pHead[nMinIndex].nPosition;}printf("the sum of move distance:%d\n",nMoveDistance); return nMoveDistance;}int DtVisit(int nCurrentPosition,bool bOut,struct Head *pHead,int nNumber){//电梯调度算法int nHaveVisited=0;int nMoveDistance=0;int nMinDistance=0;int nMinIndex=0;int i;while(nHaveVisited<nNumber)nMinDistance=0xffff;nMinIndex=0;//找最小值for(i=0;i<nNumber;i++){if(pHead[i].bVisited)continue;if(bOut&&pHead[i].nPosition<nCurrentPosition||!bOut&am p;&pHead[i].nPosition>nCurrentPosition){if(nMinDistance>abs(pHead[i].nPosition-nCurrentPosition)){nMinDistance=abs(pHead[i].nPosition-nCurrentPosition);nMinIndex=i;}}}if(nMinDistance==0xffff){bOut=!bOut;continue;}//访问Visit(&pHead[nMinIndex]);nHaveVisited++;nMoveDistance+=nMinDistance;nCurrentPosition=pHead[nMinIndex].nPosition;}printf("the sum of move distance:%d\n",nMoveDistance); return nMoveDistance;}int DxVisit(int nCurrentPosition,struct Head *pHead,int nNumber) {//单向调度算法int nHaveVisited=0;int nMoveDistance=0;int nMinDistance=0;int nMinIndex=0;int i;while(nHaveVisited<nNumber){nMinDistance=0xffff;nMinIndex=0;//找最小值for(i=0;i<nNumber;i++){if(pHead[i].bVisited)continue;if(pHead[i].nPosition>nCurrentPosition ){if(nMinDistance>abs(pHead[i].nPosition-nCurrentPosition)) {nMinDistance=abs(pHead[i].nPosition-nCurrentPosition); nMinIndex=i;}}}if(nMinDistance==0xffff){nMoveDistance+=199-nCurrentPosition;nCurrentPosition=0;continue;}//访问Visit(&pHead[nMinIndex]);nHaveVisited++;nMoveDistance+=nMinDistance;nCurrentPosition=pHead[nMinIndex].nPosition;}printf("the sum of move distance:%d\n",nMoveDistance); return nMoveDistance;}int main(int argc, char* argv[]){//p114struct Head mylist[20];//={98,false,183,false,37,false,122,false,14,false,124,false,65,f alse,67,false};//int nCurrentPosition=53;//int nRealNumber=8;int nCurrentPosition=0;int nRealNumber=ReadInputFile(mylist,&nCurrentPosition,20);// FifoVisit(nCurrentPosition,mylist,nRealNumber);// SsfoVisit(nCurrentPosition,mylist,nRealNumber);//DtVisit(nCurrentPosition,false,mylist,nRealNumber);DxVisit(nCurrentPosition,mylist,nRealNumber);return 0;}。
2017年下半年程序员考试真题及答案解析
全国计算机技术与软件专业技术资格(水平)考试2017年下半年程序员上午试卷(考试时间 9 : 00~11 : 30 共 150 分钟)1. 在答题卡的指定位置上正确写入你的姓名和准考证号,并用正规 2B 铅笔在你写入的准考证号下填涂准考证号。
2. 本试卷的试题中共有 75 个空格,需要全部解答,每个空格 1 分,满分75 分。
3. 每个空格对应一个序号,有 A、B、C、D 四个选项,请选择一个最恰当的选项作为解答,在答题卡相应序号下填涂该选项。
4. 解答前务必阅读例题和答题卡上的例题填涂样式及填涂注意事项。
解答时用正规 2B 铅笔正确填涂选项,如需修改,请用橡皮擦干净,否则会导致不能正确评分。
例题● 2017年下半年全国计算机技术与软件专业技术资格(水平)考试日期是(88)月(89)日。
(88)A. 9 B. 10 C. 11 D. 12(89)A. 4 B. 5 C. 6 D. 7 因为考试日期是“11 月 4 日”,故(88)选 C,(89)选 A,应在答题卡序号 88 下对 C 填涂,在序号 89 下对 A 填涂(参看答题卡)。
●当一个企业的信息系统建成并正式投入运行后,该企业信息系统管理工作的主要任务是(1)。
(1)A.对该系统进行运行管理和维护B.修改完善该系统的功能C.继续研制还没有完成前功能D.对该系统提出新的业务需求和功能需求●通常企业在信息化建设时需要投入大量的资金,成本支出项目多且数额大。
在企业信息化建设的成本支出项目中,系统切换费用属于(2)。
(2)A.设施费用 B.设备购置费用 C.开发费用 D.系统运行维护费用●在Excel中,设单元格F1的值为38,若在单元格F2中输入公式“= IF(AND(38)(3)A.输入正确 B.输入错误 C.TRUE D.FALSE●在Excel中,设单元格F1的值为56.323,若在单元格F2中输入公式“=TEXT (F1,”¥0.00”)”,则单元格F2值为(4)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单向扫描调度算法
什么是单向扫描调度算法?
单向扫描调度算法是一种操作系统中的进程调度算法。
在单向扫描调度算法中,CPU按照固定方向(通常为从低到高)扫描进程队列,并选择下一个可运行的进程来执行。
该算法通常用于实时系统和嵌入式系统中。
单向扫描调度算法的优点
1.简单易实现:单向扫描调度算法的实现非常简单,只需要按照固定方向扫描进程队列即可。
2.适用范围广:由于其简洁性和高效性,该算法被广泛应用于实时系统和嵌入式系统中。
3.响应时间短:由于该算法能够快速响应新到达的进程请求,因此其响应时间相对较短。
4.公平性好:该算法能够保证每个进程都有机会被执行,从而保证了公平性。
5.资源利用率高:由于该算法能够充分利用CPU资源,因此其资源利
用率相对较高。
单向扫描调度算法的缺点
1.容易产生饥饿现象:由于该算法只按照固定方向扫描进程队列,因此可能导致某些进程一直得不到执行,从而产生饥饿现象。
2.无法适应动态变化的负载:由于该算法只按照固定方向扫描进程队列,因此无法适应动态变化的负载,可能导致系统响应速度下降。
3.不够灵活:由于该算法只能按照固定方向扫描进程队列,因此不够灵活,无法适应复杂多变的系统环境。
单向扫描调度算法的实现过程
1.建立进程队列:首先需要建立一个进程队列,用于存储所有可运行的进程。
2.设定扫描方向:根据系统需求设定CPU扫描进程队列的方向(通常
为从低到高)。
3.开始扫描:CPU开始按照设定方向依次扫描进程队列中的每个进程。
4.选择下一个可运行的进程:如果当前扫描到的进程处于就绪状态,则选择该进程执行;否则继续扫描下一个进程。
5.执行选中的进程:CPU开始执行选中的可运行进程,并将其从就绪
队列中移除。
6.等待新请求:当选中的可运行进程执行完毕后,CPU重新开始扫描
进程队列,等待新的请求。
单向扫描调度算法的应用场景
1.实时系统:由于单向扫描调度算法能够快速响应新到达的进程请求,因此在实时系统中得到广泛应用。
2.嵌入式系统:由于嵌入式系统通常需要高效地利用CPU资源,因此
单向扫描调度算法也被广泛应用于该领域。
3.低负载系统:由于单向扫描调度算法具有简洁性和高效性,因此在低负载系统中也得到了广泛应用。
总结
单向扫描调度算法是一种简单、高效、适用范围广的进程调度算法。
该算法能够快速响应新到达的进程请求,保证了公平性和资源利用率,并在实时系统和嵌入式系统中得到了广泛应用。
但是该算法也存在一
些缺点,如容易产生饥饿现象、无法适应动态变化的负载等。
因此,
在实际使用中需要根据具体情况进行选择。