汽车转向系统模态仿真分析方法及评价指标
65_基于HyperWorks的汽车转向系统模态分析_李飞亚
Altair 2011 HyperWorks 技术大会论文集 基于 HyperWorks 的汽车转向系统模态分析李飞亚 王卓 张剑 长安汽车股份有限公司汽车工程研究总院 CAE 工程所 重庆 401120摘要:本文针对某款车的转向系统,运用 HyperMesh 建模,进行模态分析。
然后用后处理软件 HyperView 观察其结果,并通过对应变能云图进行分析来进行模态优化。
优化后, 转向系统的一阶垂向模态提高了 1Hz,而转向系统的质量减轻了 0.45kg,在降低成本的同 时提升了产品的性能。
关键词:转向系统 建模 后处理 优化 性能 成本1 概述转向系统是汽车结构中一个非常重要的子系统,其性能的好坏会给用户最直观的体现。
如果其设计刚度不足, 就容易在低频时产生较高的灵敏度响应, 进而发生方向盘振动的现象。
在很多时候,转向系统性能的好坏会直接影响到顾客是否会购买该汽车。
因此,在进行转向 系统设计的时候,要充分考虑其刚度要求。
在传统的开发流程中, 需要对样车进行测试才知道方向盘是否会发生振动现象。
如果这 个时候再采取补救措施,会面临改动空间小,成本大、周期长等问题,而且往往效果不甚理 想。
如果运用 CAE 方法对转向系统进行模态分析,前期发现问题,进行整改优化,那么就 可以避免上述问题。
本文案例运用 Altair 公司的有限元前处理软件 HyperMesh 和后处理软 件 HyperView 对某款车的转向系统进行分析,在前期发现了问题,并提出了解决方案。
实 现了该车在性能上和成本上的领先。
2 有限元理论N 自由度系统振动微分方程M x + C x + Kx = f ( t ) 其中,M 为质量矩阵,C 为阻尼矩阵,K 为刚度矩阵, f ( t ) 为激励力。
对于无阻尼自•••‐ 1 ‐ Altair 2011 Hy yperWorks 技术 术大会论文集由振 振动, C = 0 , f ( t ) = 0 ,方程变为: M x + Kx = 0 设特解 ••x = ϕ jωt 程化为 则微分方程( K − ω M )ϕ = 0 2得特征方程 程 K − ω 2M = 0 ω 为系统的 的固有频率, ϕ 为相应的 的振型。
转向系统模态分析方法

转向系统模态分析方法1.概述1.1模态分析简介模态分析亦即自由振动分析,是研究结构动力特性的一种近代方法,是系统辨别方法在工程振动领域中的应用。
模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。
模态参数可以由计算或实验分析取得,这样一个计算或试验分析过程称为模态分析。
1.2转向系统模态分析目的模态分析的最终目的是识别出系统的模态参数,为系统的振动特性分析、振动故障诊断和预报、结构动力特性的优化设计提供依据。
模态分析应用可归纳为:●评价现有结构系统的动态特性。
●在新产品设计中进行结构动态特性的预估和优化设计。
●诊断及预报结构系统的故障。
●控制结构的辐射噪声。
●识别结构系统的载荷。
汽车在行驶过程中,外界激励振源会引起转向系统产生共振,带来噪音,极大地降低了车辆的乘坐舒适性,造成板件的抖动开裂,零部件的疲劳损坏,转向系统表面保护层的破坏,削弱转向系统的抗腐蚀能力等。
因此,为提高汽车产品的开发设计水平,达到优化设计的目标,需要对汽车转向系统进行模态分析,通过有限元计算来得到该结构在不同频率下的振型,避免因共振等原因引起的结构破坏。
1.3模态分析的相关物理理论模态求解根据弹性力学有限元法,经分析的车身结构的运动微分方程为:[M]{ä(t)}+[C]{ȧ(t)}+[K]{a(t)}={F(t)}(1)式中,[M],[C],[K]分别为系统的质量矩阵,阻尼矩阵和刚度矩阵;{a(t)},ȧ(t),ä(t)分别为系统的位移列向量、速度列向量和加速度列向量,{F(t)}为系统的载荷列向量。
若无外力作用,即系统自由振动,有{F(t)}={0};在求解车身结构自由振动的固有频率和振型时,阻尼对它们影响不大,因此,阻尼项可以略去,这时无阻尼自由振动的运动方程为:[M]{ä(t)}+[K]{a(t)}={0}(2)其对应的特征方程为:([K]−ω2[M]){a(t)} ={0}(3)(3)式中,ω为系统的固有频率。
车载测试评估汽车行驶中的转向系统性能
车载测试评估汽车行驶中的转向系统性能随着汽车行业的迅速发展,人们对汽车的安全性和性能要求也越来越高。
车辆的转向系统作为汽车行驶过程中至关重要的组成部分,对其性能进行准确评估和测试显得尤为重要。
本文将介绍车载测试评估汽车行驶中的转向系统性能的方法和技术。
一、转向系统的重要性转向系统是汽车行驶过程中的核心系统之一,直接影响到驾驶者的操控感受和行驶的稳定性。
一个高效、准确、可靠的转向系统能够确保车辆在行驶过程中准确地按照驾驶者的操控指令进行转向,从而提高行驶的安全性和舒适性。
二、车载测试评估方法1. 实地测试:对于转向系统的评估,实地测试是最直观和准确的方法之一。
测试车辆在真实道路环境下进行各种转向动作,通过检测车辆的操控响应时间、转向力度和操控精度等指标,评估转向系统的性能。
通过实地测试,可以更真实地模拟出日常行驶中的各种场景,获得高质量的评估数据。
2. 虚拟仿真测试:虚拟仿真测试是一种基于计算机模拟的测试方法,可以在较短的时间内对转向系统进行全面的评估。
通过建立转向系统的数学模型,模拟车辆在不同道路条件下的转向行为,评估转向系统在各种情况下的表现。
虚拟仿真测试具有成本低、效率高的特点,可以在早期设计阶段发现和解决问题,加快产品开发进程。
三、转向系统性能评估指标1. 响应时间:转向系统的响应时间是指驾驶者转动方向盘到车辆真实产生转向响应的时间。
响应时间越短,转向系统的性能越好。
2. 转向精度:转向精度是指转向系统按照驾驶者操控的精度和准确性。
转向精度越高,驾驶者在操控车辆时更加准确和稳定。
3. 转向力度:转向力度是指操控方向盘所需的力量大小。
良好的转向系统应该具有较小的转向力度,减少驾驶者在操控车辆时的劳动强度。
四、转向系统性能评估技术1. 传感器技术:利用传感器技术可以实时感知车辆的转向行为和动态参数。
通过安装在转向系统中的传感器,可以准确地测量转向系统的位置、速度和力度等参数,进而评估转向系统的性能。
汽车整体式转向梯形机构仿真计算与优化
汽车整体式转向梯形机构仿真计算与优化首先,需要进行操纵性能仿真计算。
操纵性能是指车辆在转向过程中的稳定性、准确性和操纵力的大小。
通过建立车辆动力学模型,可以模拟车辆在不同转向输入下的行驶状态,并计算车辆的操纵性能参数,如转向响应时间、转向幅度和操纵力矩等。
通过对不同转向梯形机构参数的变化进行仿真计算,可以评估梯形机构对操纵性能的影响,并进行优化设计。
其次,还需要进行力学性能仿真计算。
力学性能是指转向机构在不同工况下的强度、刚度和耐久性等。
通过建立转向机构的有限元模型,可以分析转向机构在不同工况下的应力、应变和位移等力学参数,评估转向机构的设计是否满足强度和刚度要求,并进行优化调整。
同时,还可以通过应用疲劳分析方法,预测转向机构在长期使用过程中的损伤、疲劳寿命和可靠性等问题,以提高整体转向机构的耐久性。
最后,需要进行优化设计。
在进行仿真计算的基础上,可以通过参数优化和结构优化方法,对转向机构的参数和结构进行调整和改进。
例如,通过对齿条、滚珠丝杠、主动齿轮和从动齿轮等关键部件的几何参数进行优化,可以减小滚动摩擦和间隙,提高转向机构的机械效率和动力传递精度。
同时,还可以通过改变转向机构的布局和材料选择,减少转向机构的质量,并提高其刚度和强度,从而提升整体转向机构的性能。
综上所述,汽车整体式转向梯形机构的仿真计算与优化是确保汽车操纵性和稳定性的重要环节,能够通过操纵性能仿真计算、力学性能仿真计算和优化设计方法,对转向机构的性能进行评估和改进,提高汽车整体转向梯形机构的性能和可靠性。
某SUV的转向系统仿真分析及优化设计
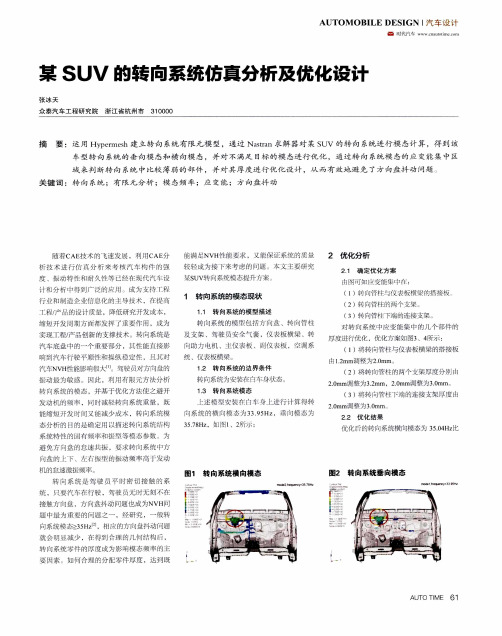
车 型 转 向 系统 的 垂 向模 态和 横 向模 态 ,并 对 不 满 足 目标 的 模 态进 行 优 化 ,通 过 转 向 系统 模 态 的应 变 能 集 中区
域 来判 断转 向 系统 中比较 薄 弱 的部 件 ,并 对 其 厚 度 进 行优 化 设 计 ,从 而 有 效 地 避 免 了方 向盘 抖 动 问题
转 向系 统 是 驾 驶 员平 时密 切 接触 的 系 统 ,只 要 汽 车 行 驶 , 驶 员 _尢 时 无 刻 不 和 接触 方 向需:,方 向盘 抖动 问题也成 为NVH问 题 中最为 重 的 题 之一 ,经研 究 ,一般转 向系 统 模 态  ̄35Hz ],村]麻 的方 向 盘 抖 动 问 题 就 会 明 显 减 少 , 在 得 到 合 理 的 几 何 结 构 后 , 转 向系统 零件 的厚度 成为 影响模 态频率 的主 要 因素 如何合 理 的分配 零件厚 度 ,达 到 既
3 结语
水文通过Hypermesh建立转 向系统 仃限7 模型 ,利用Nastran求斛器 对 E-SUV的转 J系 统模 态进行 仿真 分析 找 到 陔 删转 …系统 f.I{J薄 弱部位 ,并 埘 l0进 优 化 使 甜转 …系 统 态 达 到 目标 (J!t35Hz 、从 而 柯 效 地 避 』
图2 转向系统垂 向模态
翟 Βιβλιοθήκη 一 AUTO TIME 61
AUTo M o BlLE DESIG N
图3 转向系统应 变能示意 图 1115 转 向 系 统 横 向模 态 (优 化 后 )
图4 优化方案示意图 图6 转 向系 统 垂 向 模 态 (优 化 后 )
原:队态提升 _ r1.09Hz, 向模 态为37.60Hz, 比原状 态提升了 1.82Hz,L1J优 化斤_ >35Hz,涡 足 H标 求 .、优化 旧结 如图5、6所爪:
汽车转向系统动力学性能的仿真分析

汽车转向系统动力学性能的仿真分析汽车是现代社会的必需品之一,而转向系统作为汽车最基本的控制系统之一,也是汽车安全性能最直接相关的部件之一。
转向系统的好坏对于安全行车至关重要。
在汽车设计中,转向系统的动力学性能是一个非常重要的指标,因此对其进行仿真分析可以有效地提高汽车安全性能和行驶稳定性。
汽车转向系统的动力学性能受到多种因素的影响,如转向系统的目标点、转向系统的转向角度、车辆的速度、地面的摩擦力等等。
因此,分析转向系统的动力学性能不仅需要考虑转向系统本身的特性,还要考虑车辆的实际行驶环境以及路面的状态。
为了对汽车转向系统的动力学性能进行分析,可以利用虚拟仿真技术来模拟汽车转向过程中的各项数据,并通过数据分析来得出转向系统的动力学性能指标。
虚拟仿真技术是指利用计算机模拟现实世界中各种场景和物理过程的技术,通过分析和计算来得出需要的结果。
在进行汽车转向系统的动力学性能仿真分析时,需要先构建汽车转向系统的模型,并且确定好模型的各项参数。
一般来说,模型的参数可以根据车辆的实际情况进行调整,如车辆的长度、车宽、质量、轮胎压力等等。
通过模型构建和参数的确定,可以为汽车转向系统的仿真分析提供可靠的数据。
在进行仿真分析时,需要将模型放置在特定的环境中,如模拟特定的道路、交通状况等等。
然后,将各种力和扭矩作用于模型上,以模拟汽车在实际行驶过程中的环境和载荷。
通过对模拟过程中所得到的数据进行分析,可以得到很多有价值的信息。
如汽车的行驶稳定性、转向系统的响应速度、转向优化效果等等。
这样,设计师们可以通过仿真分析来修改和优化转向系统的设计方案,以提高汽车的行驶稳定性和安全性能。
值得注意的是,汽车转向系统的动力学性能仿真分析需要借助一些现代化的仿真软件,如Msc.Adams、MATLAB、AutoCAD等等。
这些专业仿真软件可以大大提高仿真分析的精度和准确性,从而得到更加可靠的分析结果。
总而言之,汽车转向系统的动力学性能仿真分析对于汽车设计和生产来说是非常重要的。
某卡车转向系统模态测试与分析
2 方向盘振动分析
2.1 激励源 - 传递路径 - 接受体模型 从传递路径的角度分析,引起方向盘振 动的主要原因是激励源的激励力过大或激励 频率和转向系统的固有频率耦合,使系统产 生共振。转向系统振动的激励源 - 传递路径 接受体模型如图 1 所示。 2.2 方向盘振动激励源分析 发动机激励以点火阶次为主,对于四缸 四冲程发动机而言,则以二阶激励为主。
汽车在路面上行驶,路面对轮胎进行周
期性激励,一般激励频率不超过 d
V ×N 2π R × 3.6
(1)
式中:froad 为路面对轮胎的激励频率,V
行驶速度,R 为轮胎半径,N 为路面激励阶次。
3 转向系统动力学特性试验
3.1 模态测试基本原理 具有 n 自由度的运动系统,其振动微分 方程可描述为 [M ]{x(t)}+[C]{x(t)}+[K ]{x(t)} = { f (t)} (2) 式中:[M]、[C] 和 [K] 分别为系统的质量 矩阵、阻尼矩阵和刚度矩阵;x(t)和 f(t) 分别为系统的位移向量和外界对系统的激励 向量。 对(2)式两边进行傅里叶变换,有 (−ω2[M ] + iω[C] + [K ]){X (ω)} = {F (ω)} (3) 令 H (ω) = [−ω2[M ] + iω[C] + [K ]]−1 可得
固定力锤激励点,通过不断移动加速度响应
点得到频响函数矩阵的一列,从而可以获得
一组完整的模态测试数据。
综合考虑附加质量影响和试验效率,测
试过程中以两个三向加速度传感器为一组每
汽车转向系统性能检测与评价分析
• 机动车方向盘的最大自由转动量不允许 大于:
• (1)最高设计车速不小于100km/h的机 动车:20°;
• (2)三轮汽车:45°;
• (3)其他机动车:30°。
• 2)方向盘转向力
• 机动车在平坦、硬实、干燥和清洁的水 泥或沥青道路上行驶,以10km/h的速度在
• 5s之内沿螺旋线从直线行驶过渡到直径为 24m的圆周行驶,施加于方向盘外缘的最 大切向力不应大于245N。
ab之间距离称为主销后倾拖距 力矩YL称为稳定力矩
在YL力矩作用下,将使车轮 回复到原来中间的位置,从而 保证了汽车稳定的直线行驶。 此力矩称为稳定力矩。
但此力矩也不宜过大,否 则在转向时为了克服此力矩, 驾驶员必须在转向盘上施加较 大的力(即转向沉重)。
因稳定力矩的大小取决于 力臂L的数值,而力臂L又取决 于后倾角γ的大小。现在车辆一 般采用的γ角不超过2°~3°现 代高速汽车由于轮胎气压降低 弹性增加,而引起稳定力矩增 加,因此γ角可以减小到零甚至 为负。
第四章
汽车转向系统性能检测与评价
多媒体课件
4.1汽车转向系统性能评价指标
• 1操纵性与稳定性
•汽车操纵性----驾驶员以最少的修正而能维 持汽车按给定的路线行驶以及按驾驶员愿望 转动转向盘以改变汽车行驶方向的能力。
• 操纵性能的评价: • (1)在规定车速下,汽车质心曲线轨迹与
转向盘转角的关系;
②气候条件
③左右车轮运动状态
2.转向操纵轻便性
• 转向操纵轻便性——驾驶员操纵转向盘的 容易程度。
• 转向沉重容易使驾驶员产生驾驶疲劳或使 车辆操纵失控而导致交通事故。通常采用 转向助力装置。
• 转向助力装置:液压助力、气压助力、电 动机助力
乘用车横梁及转向系统模态分析规范
精选文档Q/JLY J711 -2009乘用车IP横梁及转向系统模态CAE分析规范编制:校对:审核:审定:标准化:批准:浙江吉利汽车研究院有限公司二〇〇九年九月精选文档前言为了给新车型开发提供设计依据,指导新车设计,评估新车IP横梁及转向系统的振动特性,结合本企业实际情况,制定本规范。
本规范由浙江吉利汽车研究院有限公司提出。
本规范由浙江吉利汽车研究院有限公司工程分析部CAE科负责起草。
本规范主要起草人:袁连太。
本规范于2009年9月10日发布并实施。
1 范围本规范规定了IP横梁及转向系统模态CAE分析的软硬件设施、输入条件、输出物、分析方法、分析数据处理及分析报告。
本标准适用于乘用车IP横梁及转向系统模态CAE分析。
2 软硬件设施乘用车IP横梁及转向系统模态CAE分析,主要包括以下设施:a)软件设施:主要用于求解的软件,采用MSC/NASTRAN;b)硬件设施:高性能计算机。
3 输入条件3.1 IP横梁、转向系统、方向盘3D几何模型乘用车IP横梁及转向系统模态CAE分析的IP横梁、转向系统、方向盘3D几何模型,数据要求如下:a)IP横梁、转向系统、方向盘各个零件的厚度或厚度线;b)IP横梁、转向系统几何焊点数据;c)CAD数据中无明显的穿透或干涉;d)IP横梁、转向系统、方向盘各个零件的明细表。
3.2 IP横梁有限元模型乘用车IP横梁及转向系统模态CAE分析的输入条件主要指IP横梁、转向系统、方向盘的有限元模型,一个完整的IP横梁及转向系统模态CAE分析的有限元模型包含如下内容:a)IP横梁、转向系统、方向盘各个零件的网格数据;b)IP横梁、转向系统的焊点数据;c)各个零件的材料数据;d)各个零件的厚度数据。
3.3 关键零部件的质量信息a)方向盘安全气囊质量、安装点、质心坐标;b)DVD机质量、安装点、质心坐标。
4 输出物乘用车IP横梁及转向系统模态CAE分析的输出物为PDF文档格式的分析报告,针对不同的车型统一命名为《车型IP横梁及转向系统模态CAE分析报告》(“车型”用具体车型代号替代如:车型为GC-1,则分析报告命名为《GC-1IP横梁及转向系统模态CAE分析报告》),报告内容按7规定的内容编制。
基于仿真的汽车转向管柱模态分析
转 向管 柱总成 是汽 车转 向系统 的最 基本 组成部 分之一, 它是 决定 汽 车行 驶 安 全 性 与可 靠 性 的关 键 部 件 。如何保 证转 向管 柱总 成符合设 计 的性 能要求
是人们 最关 注 的问题 , 中对 转 向 管柱 总成 的 模态 其 分析 是保证 和提 高产 品质量 的一个 重要 环节 。车身 结 构 本身是 一个无 限 多 自由度 的振 动 系 统 , 外界 在
厚 度 。电机需 采用简 化 的壳体 处理 , 通过 改变厚 度 、
/ 一 型 /
图 2 简 化 的 方 向盘模 型 图 3 部 分 内 管
表 1 模 型 单 元数 与节 点 数
密 度来 调节 电机 的质量 和质 心 。方 向盘 的气 囊模块 采 用质 量点 表示 , 他构 件 均采 用 壳单 元 。 图 1 3 其 ~
2 8
H i h y Au与 o ieAp运 to s g 公 路 t m tv plc in wa s o 汽 ia
第 6期 21 0 1年 l 1月
基 于仿 真 的汽 车 转 向管柱 模 态分 析
孙 连 伟
( 宁省 交通 高等 专 科 学 校 , 宁 沈 阳 10 2 ) 辽 辽 1 12
ห้องสมุดไป่ตู้
总第 1 7期 4
Hi h y g wa s& Auo tv plc to s tmoie Ap ia in
表 2 模 型 材 料 参 数
公 路 与 汽 运
2 9
图 ‘ 转 向管 柱 初 始 模 态 分 析 结 果 6
近 , 明模 拟频 率值 比较 准 确 , 型搭建合 理 。接下 证 模 分析 。选 取 仪 表 板 横 梁 上 所 有 的部 件 作 为 设 计 变 量 , 解 出灵 敏度 高 的部 件 ( 图 4所示 ) 求 如 。图 5为 初始 仪表 板横 梁结 构 , 中标 注 的部 件 为 灵 敏 度 高 其