悬 臂 梁 的 有 限 元 分 析
考虑剪切变形的空间梁单元有限元分析
《有限元方法》2023年课程大作业*名:***学号:XS********指导老师:**教授*********大学二〇二三年五月目录1作业内容与要求 (2)2考虑剪切变形空间梁的势能泛函和梁单元位移插值函数,并通过泛函变分原理推导得到梁单元的刚度方程 (2)3、给出matlab编写的有限元程序源代码以及对应的说明,包括 (5)1) 有限元程序整体架构,计算的流程图; (5)2) 离散化与编号; (8)3) 数据的准备; (8)4) 单元分析形成单元刚度矩阵; (11)5) 组装整体刚度矩阵; (13)6) 节点载荷的计算; (14)7) 边界条件的处理及刚度方程求解; (17)8) 应力和应变的计算;.......................................................... 错误!未定义书签。
9) 和无开口梁情况分析比较 (18)10) 结论。
(20)1作业内容与要求如图1所示,某悬臂梁,有三个矩形开口,梁端承受一集中载荷F ,大小为60000N 。
试采用考虑剪切变形的2结点空间梁单元,用matlab 编写有限元程序,计算梁端A 点的线位移,并和无开口梁的结果进行比较。
悬臂梁材料的杨氏模量,泊松比。
图1 矩形开口悬臂梁结构末端受集中力F 作用示意图要求:一、纸质报告A4单面打印,随笔试答卷一起上交; 二、报告格式要求同研究生学位论文;2考虑剪切变形空间梁的势能泛函和梁单元位移插值函数,并通过泛函变分原理推导得到梁单元的刚度方程首先把空间梁单元分解成一个杆单元、一个轴单元,和xoy ,xoz 平面内的两个平面梁,由此可以吧得到空间梁单元的能量泛函为:22200022200000111Π(,,,)d d d 222111d ()d ()d 222 d d l l l x y xoz xoz z xoy xoz l l l x xoy xoy l l z z j iz i z jimj GA u v w EI x x EI x k d GA du x EA x JG x k dx dxq w x P w M qv x P θκγκθγθ=⎰+⎰+⎰+⎰+⎰+⎰-⎰-∑+∑-⎰-∑00 d -d ym m n n l l x z l x x k x k xknl lv M f u x F u m x M θθθ+∑⎰-∑-⎰-∑ (1)首先给出如下的形函数(插值函数)()()23123322332334561322321N N l N N l N N ξξξξξξξξξξξ=-+=-+=-=-+=-= (2)其中,01ix x lξξ-=≤≤ (3)对于考虑剪切变形的梁单元将挠度分解为b S w w w =+(4)则节点位移为112212b e b b s es s w q w w q w θθ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤=⎢⎥⎣⎦(5)其中1212d d ,d d b b w w x x θθ⎛⎫⎛⎫== ⎪ ⎪⎝⎭⎝⎭(6)考虑将s w 采用2结点的Lagrange 插值,即线性插值; bw 采用与不考虑剪切变形梁单元的w 相同的Hermite 插值,则有112132425162b b bsss w N w N N w N w N w N w θθ=+++=+ (7)利用平衡方程将sw 凝聚掉,可以得到最终平面梁单元的能量泛函为1Π()2Te q q K q Fq =- 其中()()11222321220[,,,]1261266(4)6(2)126126(1)6(2)6(4)d //e e T T Tj j b l k l l l b l l b l EI K l l b l l b l l b w l P N ql N P dN d M q lw ξξξθθξ-⎡⎤⎢⎥+--⎢⎥=⎢⎥---+⎢⎥--+⎣⎦=⎰+∑-∑⋅= (8)对于杆单元5162u N u N u =+(9)杆单元的能量泛函为1Π()2Te q q K q Fq =- 其中Ke 杆的刚度矩阵()02111111[,]d e T Tx j j x EA Ke l P N ql N P q u u ξξ-⎛⎫=⎪-⎝⎭=⎰+∑= (10)同理可以得到轴的5162x N N θθθ=+(11)能量泛函为1Π()2Te q q K q Fq =- 其中Ke 杆的刚度矩阵()02111111[,]d e T Tx j j x GJ Ke lP N ql N P q θξθξ-⎛⎫=⎪-⎝⎭=⎰+∑= (12)最后将这些进行组合可以得到总的能量泛函为 1Π()2T e q q K q Fq =-(13)其中3333333322333323126126(1)(1)(1)(1)126126(1)(1)(1)(1)6(4)6(2)(1)(1)(1)(1)6(4)(1)(1)z z z z y y y y yy y y z z EAEA l lEI lEI EI lEI b l b l b l b l EI lEI EI lEI b l b l b lb l GJ GJl llEI b l EI lEI b l EI b l b l b l b l lEI b l EI b l b --++++---++++-+--+++++++23333333333322333(2)6(1)(1)126126(1)(1)(1)(1)126126(1)(1)(1)(1)((2)(4)6(1)(1)(1)6(y z z z z z y y y y y y z z b l EI lEI l b l b l EA EA l lEI lEI EI lEI b l b l b l b l EI lEI EI lEI b l b l b l b l GJGJ l lb l EI b l EI lEI b l b l b l lEI --++---++++-++++---+-+++3111111222222223333((2)66(4)1 [,,,,,,,,,)(1)(1)(1,,)(1)z z z z x y z x y z b l E u I lEI lEI b l EI b l b l b l b l b w l q v u v w θθθθθθ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-+-+++++⎥⎢⎥⎢⎣⎦=](14)对能量泛函1Π()2Teq q K q Fq=-取变分为零即Π()0eq K q F=-=(15)即空间梁单元的刚度方程3、给出matlab编写的有限元程序源代码以及对应的说明,包括1) 有限元程序整体架构,计算的流程图;程序的流程图如下图所示global E mu G; %将泊松比和杨氏模量声明为全局变量E = 2.0e11; %给杨氏模量赋予指定值mu = 0.25; %给泊松比赋予指定值G = E/(1+mu)/2; %有泊松比杨氏模量计算剪切模量L=[15,30,15,30,15,30,15]*10^(-2);A=[30*10,15*10,30*10,15*10,30*10,15*10,30*10]*10^(-4);Iy=[10*(30^3),10*(30^3)-10*(15^3),10*(30^3),10*(30^3)…-10*(15^3),10*(30^3),10*(30^3)-10*(15^3),10*(30^3)]/12*10^(-8);2) 离散化与编号;在本次作业中根据梁的截面变化将梁分成七个单元从左到右依次编号为①②③④…⑦,为了保证最后组集得到最终刚度矩阵的稀疏性,减小存储矩阵的半带宽,节点编号也是采用从左到右依次1,2,3,4,…8的编号方法,具体离散化和单元以及节点编号的示意图如下图所示:图一、悬臂梁单元的离散以及单元节点编号示意图这一部分程序体现在main—function主函数中。
悬臂梁分析报告
悬臂梁受力分析报告高一博2016.11.13西安理工大学机械与精密仪器工程学院摘要利用ANSYS对悬臂梁进行有限元静力学分析,得到悬臂梁的最大应力和挠度位移。
从而校验结构强度和尺寸定义,从而对结构进行最优化设计修正。
关键词:悬臂梁,变形分析,应力分析目录一.问题描述: (4)二.分析的目的和内容: (4)三.分析方案和有限元建模方法: (4)四.几何模型 (4)五.有限元模型 (4)六.计算结果: (5)七.结果合理性的讨论、分析 (8)八.结论 (8)参考文献 (8)一.问题描述:现有一悬臂梁,长500MM,一端固定,另外一端施加一个竖直向下的集中力200N。
其截面20MMX20MM的矩形,现在要分析该梁的在集中力作用下产生的位移,应力和局部应力。
二.分析的目的和内容:1.观察悬臂梁的变形情况;2.观察分析悬臂梁的应力变化;3.找出其最大变形和最大应力点,分析形成原因;三.分析方案和有限元建模方法:1.使用ANSYS-modeling-create-volumes-block建模,2.对梁进行材料定义,网格划分。
3.一端固定,另外一端施加一个向下的200N的力。
4.后处理中查看梁的应力和变形情况。
四.几何模型500X20X20的梁在在ANSYS中进行绘制.由于结构简单规则,无需简化。
五.有限元模型单元类型:solid brick8node45材料参数:弹性模量2e+11pa,泊松比0.3边界条件:一端固定,一端施加载荷载荷:F=200N划分网格后的悬臂梁模型六.计算结果:变形位移图等效应力图局部应力图七.结果合理性的讨论、分析1.位移分析:在变形位移图上,在约束端位移最小为零,受压端位移最大。
与实际结果一致。
2.应力分析:在应力图上,应力最大处在约束端,而最小的位于受压端,与变形图相对应。
通过材料力学计算可知约束端的所受弯矩最大。
两个结果印证无误。
3.局部应力分析:在局部应力图上,可以看出在固定端上表面存有较大的应力,且为拉应力,受压端直角尖处有最大应力,从形成原因上分析属于尖角处应力集中。
有限元分析中的结构静力学分析怎样才能做好精选全文

可编辑修改精选全文完整版有限元分析中的结构静力学分析怎样才能做好1 概述结构有限元分析中,最基础、最根本、最关键、最核心同时也是最重要的一种分析类型就是“结构静力学分析”。
静力学分析可用于与结构相关、与流体相关、与电磁相关以及与热相关的所有产品;静力学分析是有限元分析的根基,是有限元分析的灵魂。
2 基础理论结构静力学按照矩阵的形式可表示为微分方程:[K]{x}+{F}=0其中,[K]代表刚度矩阵,{x}代表位移矢量,{F}代表静载荷函数。
由此可知,结构静力学有限元分析过程就是求解微分方程组的过程。
2.1 三个矩阵的说明静力学分析微分方程组三个矩阵进一步说明:[K]代表刚度矩阵。
举例说明,如果用手折弯一根筷子,假设筷子是钢材料的,比较硬,很难折断;假设筷子是常规木材的,比较脆,基本上都能折断。
这里筷子断与不断的本质并不是钢或者木材,而是钢或者木材表在筷子上表现出来的刚度(或者叫硬度),这里刚度用计算机数值分析的方式来描述,就是刚度矩阵。
{x}代表位移矢量。
举例说明,一把椅子,如果有人偏瘦,坐在椅子上,椅面基本不下沉;如果有人偏胖,坐在椅子上,椅面会有明显下沉(谁坐谁知道...),此时,椅面的下沉量,可用位移矢量来表示。
{F}代表静载荷函数,也是静力学分析的关键。
举例说明,上面筷子例子中,手腕对筷子的作用,就是一种载荷(或者叫外力、荷载、负荷、承重等);上面椅子例子中,人对椅子表面的作用,也是一种载荷。
这些载荷在大多数情况下,没有明显的快慢效应,就可用静载荷函数来表示。
2.2 静力学分析中的载荷说明静载荷函数本质说明:假设1,相同一根筷子,又假设筷子比较粗(或者说是几根筷子捆绑在一起):双手慢慢用1 / 5力,筷子难断;双手快速用力,筷子难断,此时慢慢折弯的效果就可以理解为静力学过程。
假设2,相同椅子:慢慢坐下去,椅子没有明显晃动;快速坐下去,椅子没有明显下沉与晃动,此时慢慢坐在椅子上的过程就可以理解为静力学过程。
悬臂梁结构动力响应分析与优化设计
悬臂梁结构动力响应分析与优化设计悬臂梁是一种常见的结构形式,在工程中有广泛的应用。
然而,由于其特殊的结构特点,悬臂梁在受到外界力作用时容易发生动力响应,影响其安全性和稳定性。
因此,对悬臂梁结构进行动力响应分析与优化设计,对于确保结构的安全性和可靠性至关重要。
悬臂梁结构的动力响应分析是指通过数学建模和计算分析对悬臂梁在受到外界力作用下的响应情况进行评估。
在进行动力响应分析时,需要考虑诸如结构的质量、刚度等参数。
通常,可以利用有限元方法对悬臂梁进行动力响应分析。
有限元方法是一种通过将结构离散为有限个小单元,然后对每个小单元进行力学计算,并将计算结果进行组合得出整体结构响应的数值计算方法。
通过有限元分析,可以得出悬臂梁受力情况、变形情况等重要参数,对于结构的合理设计和改进提供科学依据。
在动力响应分析的基础上,进行悬臂梁结构的优化设计是为了提高其动力响应性能。
悬臂梁的优化设计要考虑多个因素,包括结构的材料性能、几何形状、截面尺寸等。
在材料性能方面,通常需要选择具有较高强度和刚度的材料,以保证结构的承载能力。
在几何形状和截面尺寸方面,通过合理选择和设计,可以减小结构的质量和惯性矩,从而降低悬臂梁的动力响应。
对于悬臂梁结构的优化设计,常见的方法是结构拓扑优化和参数优化。
结构拓扑优化通过改变梁的支座位置、截面形状等来优化悬臂梁结构。
参数优化则是在已定形状的基础上,优化截面尺寸、材料性能等参数,以达到优化结构动力响应的效果。
这两种方法既可以分开进行也可以结合使用,通过多次计算和比较来找到最优的结构设计方案。
悬臂梁结构动力响应分析与优化设计是一个综合性和复杂性的工程问题。
在实际工程中,需要综合考虑结构的静力和动力响应,还要考虑材料的可获得性、成本等因素。
因此,对悬臂梁结构进行动力响应分析与优化设计需要多学科的知识和专业工具的支持。
只有通过科学的方法和综合考虑各种因素,才能得到结构性能和经济性的双重保证。
总之,悬臂梁结构动力响应分析与优化设计对于确保结构的安全性和可靠性具有重要意义。
第五章 悬臂梁桥简介
第五章 悬臂梁桥简介钢筋混凝土简支梁桥,由于构造简单,预制和安装方便,在桥梁建设中得到了广泛使用。
然而这种简支体系当跨径超过20~25m时,鉴于跨中恒载弯矩和活载弯矩将迅速增大,致使梁的截面尺寸和自重显著增加,这样不但材料耗用量大而不经济,并且很大的安装重量也给装配式施工造成困难。
因此,对于较大跨径的桥梁,为了降低材料用量指标,就宜采用能减小跨中弯矩值的其他体系桥梁,如悬臂体系和连续体系梁桥等。
本章内将主要介绍悬臂梁桥的力学特点、一般构造特点及其设计要点,以便在掌握简支梁桥构造和设计的基础上,从力学和混凝土原理等方面知识出发,进一步了解和掌握这类体系桥的计算和设计工作。
5.1 悬臂梁桥结构类型和力学特点5.1.1 悬臂梁桥结构类型将简支梁梁体加长延伸,并越过支点就成为悬臂梁桥。
我们把梁的一端悬出和两端均悬出分别称为单悬臂梁和双悬臂梁。
常见的类型有:双悬臂梁桥(图5.2a)、两个单悬臂梁与中孔简支挂梁组合的三跨悬臂梁桥(图5.2b)、双悬臂梁(或单悬臂梁)与简支挂梁联合组成多孔悬臂梁桥(图5.2c),以及带挂梁的T形悬臂梁桥(图5.1d,即带挂梁的T形刚构)。
根据桥长的需要可选用不同的类型。
通常将悬臂梁主跨称为锚跨。
多孔悬臂梁桥的结构特点是锚跨与挂孔跨交替布置,通常为奇数跨布置。
5.1.2 悬臂梁桥力学特点悬臂梁桥利用悬出支点以外的伸臂,使支点产生负弯矩,对锚跨跨中正弯矩产生有利的卸载作用。
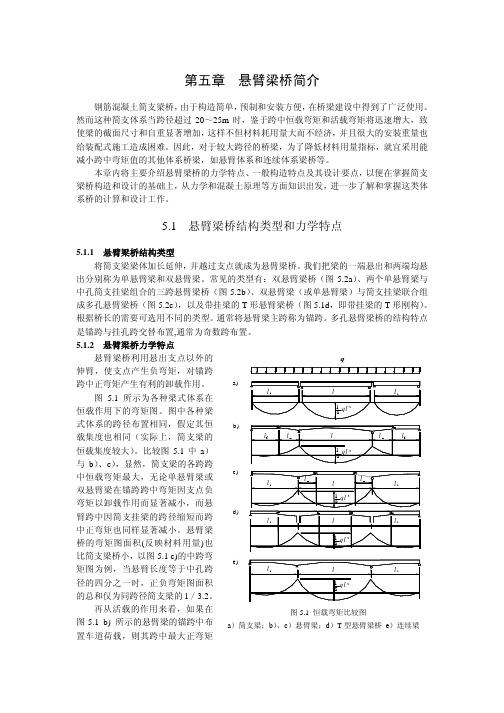
图 5.1所示为各种梁式体系在恒载作用下的弯矩图。
图中各种梁式体系的跨径布置相同,假定其恒载集度也相同(实际上,简支梁的恒载集度较大)。
比较图5.1中a)与b)、c),显然,简支梁的各跨跨中恒载弯矩最大,无论单悬臂梁或双悬臂梁在锚跨跨中弯矩因支点负弯矩以卸载作用而显著减小,而悬臂跨中因简支挂梁的跨径缩短而跨中正弯矩也同样显著减小。
悬臂梁桥的弯矩图面积(反映材料用量)也比简支梁桥小,以图5.1 c)的中跨弯矩图为例,当悬臂长度等于中孔跨径的四分之一时,正负弯矩图面积的总和仅为同跨径简支梁的1/3.2。
用有限元法对悬臂梁分析的算例算例
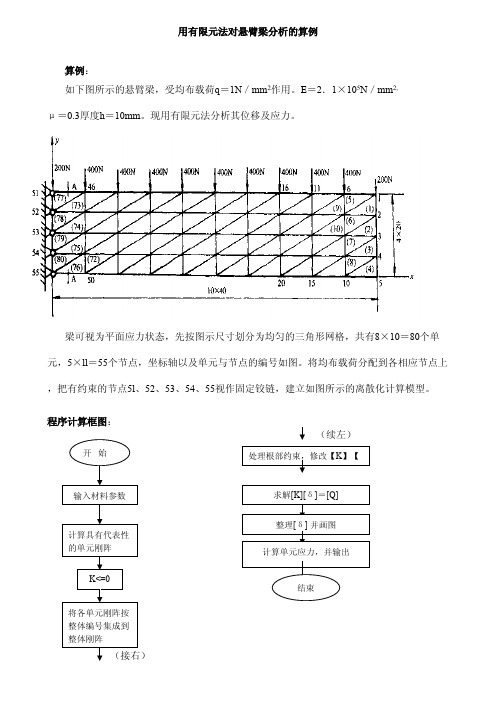
用有限元法对悬臂梁分析的算例算例:如下图所示的悬臂梁,受均布载荷q =1N /mm 2作用。
E =2.1×105N /mm 2,μ=0.3厚度h =10mm 。
现用有限元法分析其位移及应力。
梁可视为平面应力状态,先按图示尺寸划分为均匀的三角形网格,共有8×10=80个单元,5×ll =55个节点,坐标轴以及单元与节点的编号如图。
将均布载荷分配到各相应节点上,把有约束的节点5l 、52、53、54、55视作固定铰链,建立如图所示的离散化计算模型。
程序计算框图:(续左)程序中的函数功能介绍及源代码1.LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym)――该函数用于计算平面应力情况下弹性模量为E、泊松比为NU、厚度为t、第一个节点坐标为(xi,yi)、第二个节点坐标为(xj,yj)、第三个节点坐标为(xm,ym)时的线性三角形元的单元刚度矩阵.该函数返回6×6的单位刚度矩阵k.2.LinearTriangleAssemble(K,k,i,j,m)――该函数将连接节点i,j,m的线性三角形元的单元刚度矩阵k集成到整体刚度矩阵K。
每集成一个单元,该函数都将返回2N×2N的整体刚度矩阵K.3.LinearTriangleElementStresses(E,NU,t,xi,yi,xj,yj,xm,ym,u)-- 该函数计算在平面应力情况下弹性模量为E、泊松比为NU、厚度为t、第一个节点坐标为(xi, yi)第二个节点坐标为(xj,yj)、第三个节点坐标为(xm,ym)以及单元位移矢量为u时的单元应力。
该函数返回单元应力矢量。
函数源代码:function y = LinearTriangleElementStiffness(E,NU,t,xi,yi,xj,yj,xm,ym)A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;%三角形单元面积,单元节点应该按逆时针排序,保证每个三角形单元的面积都为正值(也可作为一个小函数:LinearTriangleElementArea)betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);%B为应变矩阵,其中betai=yi-ym,betaj=ym-yi,betam=yi-yj.gammai=xm-xj, gammaj=xi-xm, gammam=xj-xi.D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];%D为弹性矩阵,分为平面应力问题和平面应变问题对于平面应力问题D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];对于平面应变问题E1=E/(1-NU*NU),NU1=NU/(1-NU)y = t*A*B'*D*B;%单元刚度矩阵function y = LinearTriangleAssemble(K,k,i,j,m)K(2*i-1,2*i-1) = K(2*i-1,2*i-1) + k(1,1); K(2*i-1,2*i) = K(2*i-1,2*i) + k(1,2);K(2*i-1,2*j-1) = K(2*i-1,2*j-1) + k(1,3); K(2*i-1,2*j) = K(2*i-1,2*j) + k(1,4);K(2*i-1,2*m-1) = K(2*i-1,2*m-1) + k(1,5); K(2*i-1,2*m) = K(2*i-1,2*m) + k(1,6);K(2*i,2*i-1) = K(2*i,2*i-1) + k(2,1); K(2*i,2*i) = K(2*i,2*i) + k(2,2);K(2*i,2*j-1) = K(2*i,2*j-1) + k(2,3); K(2*i,2*j) = K(2*i,2*j) + k(2,4);K(2*i,2*m-1) = K(2*i,2*m-1) + k(2,5); K(2*i,2*m) = K(2*i,2*m) + k(2,6);K(2*j-1,2*i-1) = K(2*j-1,2*i-1) + k(3,1); K(2*j-1,2*i) = K(2*j-1,2*i) + k(3,2);K(2*j-1,2*j-1) = K(2*j-1,2*j-1) + k(3,3); K(2*j-1,2*j) = K(2*j-1,2*j) + k(3,4);K(2*j-1,2*m-1) = K(2*j-1,2*m-1) + k(3,5); K(2*j-1,2*m) = K(2*j-1,2*m) + k(3,6);K(2*j,2*i-1) = K(2*j,2*i-1) + k(4,1); K(2*j,2*i) = K(2*j,2*i) + k(4,2);K(2*j,2*j-1) = K(2*j,2*j-1) + k(4,3); K(2*j,2*j) = K(2*j,2*j) + k(4,4);K(2*j,2*m-1) = K(2*j,2*m-1) + k(4,5); K(2*j,2*m) = K(2*j,2*m) + k(4,6);K(2*m-1,2*i-1) = K(2*m-1,2*i-1) + k(5,1); K(2*m-1,2*i) = K(2*m-1,2*i) + k(5,2);K(2*m-1,2*j-1) = K(2*m-1,2*j-1) + k(5,3); K(2*m-1,2*j) = K(2*m-1,2*j) + k(5,4);K(2*m-1,2*m-1) = K(2*m-1,2*m-1) + k(5,5); K(2*m-1,2*m) = K(2*m-1,2*m) + k(5,6);K(2*m,2*i-1) = K(2*m,2*i-1) + k(6,1); K(2*m,2*i) = K(2*m,2*i) + k(6,2);K(2*m,2*j-1) = K(2*m,2*j-1) + k(6,3); K(2*m,2*j) = K(2*m,2*j) + k(6,4);K(2*m,2*m-1) = K(2*m,2*m-1) + k(6,5); K(2*m,2*m) = K(2*m,2*m) + k(6,6);K;%对号入座,如前所述,每集成一次都将返回2N×2N的整体刚度矩阵K.此题为110×110 function y = LinearTriangleElementStresses(E,NU,t,xi,yi,xj,yj,xm,ym,u)A = (xi*(yj-ym) + xj*(ym-yi) + xm*(yi-yj))/2;betai = yj-ym;betaj = ym-yi;betam = yi-yj;gammai = xm-xj;gammaj = xi-xm;gammam = xj-xi;B = [betai 0 betaj 0 betam 0 ;0 gammai 0 gammaj 0 gammam ;gammai betai gammaj betaj gammam betam]/(2*A);D = (E/(1-NU*NU))*[1 NU 0 ; NU 1 0 ; 0 0 (1-NU)/2];%平面应力和平面应变问题两种情况y = D*B*u;%单元应力计算主程序源代码E=21e7;NU=0.3;t=0.01;stifflike5=LinearTriangleElementStiffness(E,NU,t,0.4,0.08,0.36,0.08,0.36,0.06,1) %选取2个基本单元,调用M文件stifflike1=LinearTriangleElementStiffness(E,NU,t,0.4,0.08,0.36,0.06,0.4,0.06,1) K=sparse(110,110); %creat a xishu matrix for total stiff创建一个稀疏矩阵for i=1:49if rem(i,5)%模取余,bool型变量,非零即为真j=i;K=LinearTriangleAssemble(K,stifflike5,j,j+5,j+6);%节点编号K=LinearTriangleAssemble(K,stifflike1,j,j+6,j+1);endend%将每个单元刚度矩阵集成到总刚中K=full(K);%转化稀疏矩阵 k=K(1:100,1:100);k=[K,zeros(100,10);zeros(10,100),eye(10)];k=sparse(k);%利用边界条件简化基本方程Q=sparse(2:10:92,1,[-200,-400,-400,-400,-400,-400,-400,-400,-400,-400,],110,1);%外部荷载,此处不包括约束条件,通过形函数确定,是不是可以理解为梁的两端为中间的一半呢?d=k\Q;%高斯消元法,比克莱姆法则在计算速度上有绝对的优势!x=0:0.04:0.4;plot(x,d(106:-10:6))%基本绘图命令grid%带网格y=zeros(80,3);q=0;for i=1:49switch rem(i,5)case 1j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.08;xm=0.36;ym=0.06;xn=0.4;yn=0.06;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)';xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 2j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];xl=0.4;yl=0.06;xm=0.36;ym=0.04;xn=0.4;yn=0.04;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 3j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.04;xm=0.36;ym=0.02;xn=0.4;yn=0.02;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 4j=2*i;u=[d(j-1) d(j) d(j+11) d(j+12) d(j+1) d(j+2)];u=u';xl=0.4;yl=0.02;xm=0.36;ym=0;xn=0.4;yn=0;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;otherwiseq=q+3;endendq=4;for i=1:49switch rem(i,5)case 1j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.08;xm=0.36;ym=0.08;xn=0.36;yn=0.06;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 2j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.06;xm=0.36;ym=0.06;xn=0.36;yn=0.04;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 3j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.04;xm=0.36;ym=0.04;xn=0.36;yn=0.02;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)'; xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;case 4j=2*i;u=[d(j-1) d(j) d(j+9) d(j+10) d(j+11) d(j+12)];u=u';xl=0.4;yl=0.02;xm=0.36;ym=0.02;xn=0.36;yn=0;y(i+q,:)=LinearTriangleElementStresses(E,NU,t,xl,yl,xm,ym,xn,yn,u)';xl=xl-0.04;xm=xm-0.04;xn=xn-0.04;otherwiseq=q+3;endend %y(i+q,:)这是实现什么的?没见过这种用法,算法上应该就是通过节点位移实现指定单元的内力,这部分本人看的也晕晕的,望高人指点N=y(73:80,1)结果图及数据输出悬臂梁轴线挠度图:一单元的单元刚阵1.0e+006 *0.8077 0 0 -0.4038 -0.8077 0.40380 2.3077 -0.3462 0 0.3462 -2.30770 -0.3462 0.5769 0 -0.5769 0.3462-0.4038 0 0 0.2019 0.4038 -0.2019-0.8077 0.3462 -0.5769 0.4038 1.3846 -0.75000.4038 -2.3077 0.3462 -0.2019 -0.7500 2.5096五单元的单元刚阵1.0e+006 *00.050.10.150.20.250.30.350.4x/m w /m0.5769 0 -0.5769 0.3462 0 -0.34620 0.2019 0.4038 -0.2019 -0.4038 0-0.5769 0.4038 1.3846 -0.7500 -0.8077 0.34620.3462 -0.2019 -0.7500 2.5096 0.4038 -2.30770 -0.4038 -0.8077 0.4038 0.8077 0-0.3462 0 0.3462 -2.3077 0 2.3077根部73-80各单元应力计算结果如下(n/m2):1.0e+007 *2.1119 -0.0621 -2.2816 -4.8824 5.0479 2.4065 0.0352 -2.3753。
悬臂梁变形及应力分析

基于ANSYS 10.0对悬臂梁的强度及变形分析姓名:***班级:机制0803班学号:************对悬臂梁的受力及变形分析摘要:本研究分析在ANSYS10.0平台上,采用有限元法对悬臂梁进行强度与变形分析、验证此悬臂梁设计的合理性。
一、问题描述长度L=254 mm的方形截面的铝合金锥形杆,上端固定,下端作用有均布拉力P=68.9 Mpa,上截面的尺寸50.8×50.8 mm,下截面尺寸25.4×25.4 mm(见右图),弹性模量E=7.071×104 Mpa,泊松比μ=0.3,试用确定下端最大轴向位移δ和最大轴向应力。
试将分析结果与理论解进行比较,说明有限元分析的误差。
(理论解:最大轴向位移δ=0.1238 mm)。
二、建立有限元模型:定义模型单元类型为:solid(实体)95号单元,材料常数为:弹性模量E=7.071×104 Mpa,泊松比μ=0.3。
三、有限元模型图:建立有限元模型时,观察模型的形状可知,我们可以先建立模型的上下底面,再根据有上下底面形成的八个关键点(keypoints)生成线,接着生成面,生成体。
最后生成该悬臂梁的模型图,示图如下:整个模型建立好之后即可对其划分网格,划分网格时,若选择自由划分则生成的网格比较混乱,不能比较准确的模拟该梁真实的受力变形情况。
故我们选择智能划分模式,并且分别对模型的各个棱边(lines)进行均匀分割,这样可以划分出比较理想的网格,更利于我们的研究和分析。
网格划分之后的模型图为:四、加载并求解:根据该悬臂梁的受力特点,我们在其下底面(比较大的底面)上进行六个自由度的位移约束,而在其上地面上施加大小为P=68.9 Mpa均布拉力,将载荷加载好之后便可进行运算求解,求解完成之后,我们得到其位移变形图如下:Z向位移云图为:Z向应力云图为:五、结果分析及结论:由以上两张云图和一张变形图中我们可以读出,悬臂梁的最大轴向(Z向)位移和轴向(Z向)最大应力分别为:最大轴向位移为:δ=0.123746 mm 最大轴向应力为:σ=68.224 Mpa 但是,我们知道,如果所划分的网格有差异时,计算结果将会产生一定的误差,由于设计要求的最大轴向位移不能超过0.1238mm,而我们的建模计算结果已经小于此设计要求值。
基于有限元软件ANSYS分析简单悬臂梁的模型
2.2有 限元 网格 处理 速度 的提升
Cntrls—}ManualSize_ Lines—}AU Lines
有 限元分 析 过程 主要 包含 了三 个 步骤 :对 分 析对 象进 行 离 ANSYS Ma in Menu: Preprocessor _+ Meshing-+MeshrI l
2018.26科 学技 术创新 一123一
基 于有 限元软 件 ANSYS分析 简单悬臂 梁 的模 型
郭安 江 (安徽理工大学 土木建筑学院,安徽 淮南 232001)
摘 要:作为 目前世界上发展最快的计算机辅助工程(cAE)工具 ,NSYS软件的接 口可 以与大多数计算机辅助 工程(cAE)工具
关键 词 :ANSYS软件 ;有 限元 ;线 性 ;悬臂 梁
中 图 分 类 号 :TU375.1
文 献 标 识 码 :A
文章 编号 :2096-4390(2018)26-0123—02
1 ANSYS软 件简 介
于应用线性理论来解决破坏 、裂纹扩展等问题 ,还需要解决材料
为了验证某机械结构系统是否满足安全性等设计需求 ,我 的塑形和蠕变效应 ,此时必须求解材料的非线性问题 ,例如对塑
连接。计算机辅助设计软件相对应 ,为数据的共享和交流提供 了便利 ,例如 Creo,NASTRAN,I-DEAS,AutoCAD等软件 。ANSYS
软件 。包含 了多种有限元分析软件的功能 ,从 简单的线性静 力分析到非常复杂的非线性动 力分析 ,再到电磁 分析、流体分析 、热分
析等。在每一个不同的工程领域 ,ANSYS软件分析方法有所差别 ,步骤也不一样。本文主要分析简单悬臂梁的有限元模型。
散化 处理 、有 限元求 解 、对计 算 结果 进行 后处 理 。过 去 由于计 算 Mesh:lines
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬臂梁的有限元分析
1 几何模型
在部件中新建一个几何模型,类型为可变性,形状为实体,类型为拉伸,模型空间为三维。
在网格线中画一个5ⅹ5的正方形,进行拉伸,拉伸长度为47。
图1.1 几何建模过程图
如图所示,模块创立好
图1.2 几何建模图
2 材料属性
1)在模块列表中选择属性功能模块,按照步骤,先创建材料(材料类型为钢)。
2)材料行为选择为弹性,同时弹性模量为200e3MPa,泊松比为0.3
3)创建截面属性,保持默认参数不变,点击继续
4)给部件赋予截面属性
图2.1 材料属性
3定义装配件
在左上角的模块列表中选择装配功能模块,点击默认参数。
4设置分析步
选择分析步模块,取名为step-1,分析步类型为静力,通用。
其余默认-点击继续
图4.1 分析步
5.载荷与边界
1)施加载荷点击创建载荷,将分析步载荷类型设置为压强,其余参数为默认,点击继续,
选择平板上平面,压强大小为0.188
2)选择长方体做平面制定约束
图5.1 载荷与边界
6划分网格
在模块列表中选择网格功能模块,注意划分网格是为部件划分,而不是为装配件划分。
如图,单元类型为CPS4R:四结点双线性平面应力四边形单元,
如图,单元数为1175,结点总数为1728
7分析结果
7.1应力变形云图
7.2位移变形云图
8分析结果
如图所示,Smax=3.82e1<113根据第四强度理论,该平板不会发生断裂。