%% [ ProductName ESP Ghostscript]%% Extraction and Clustering of Motion Trajectories in Vid
NVIDIA Nsight Systems 2022.3.4安装指南说明书
Nsight Systems Installation GuideTABLE OF CONTENTS Chapter 1. Overview (1)Chapter 2. System Requirements (3)Supported Platforms (3)CUDA Version (3)Requirements for x86_64, Power, and Arm SBSA T argets on Linux (4)x86_64 Windows T arget Device Requirements (5)Host Application Requirements (5)Chapter 3. Getting Started Guide (7)3.1. Finding the Right Package (7)3.2. Installing GUI on the Host System (8)3.3. Optional: Setting up the CLI (8)3.4. Launching the GUI (9)Nsight Systems is a statistical sampling profiler with tracing features. It is designed to work with devices and devkits based on NVIDIA Tegra SoCs (system-on-chip), Arm SBSA (server based system architecture) systems, IBM Power systems, and systems based on the x86_64 processor architecture that also include NVIDIA GPU(s). Throughout this document we will refer to the device on which profiling happens as the target, and the computer on which the user works and controls the profiling session as the host. Note that for x86_64 based systems these may be on the same device, whereas with Tegra, Arm, or IBM Power based systems they will always be separate. Furthermore, three different activities are distinguished as follows:‣Profiling — The process of collecting any performance data. A profiling session in Nsight Systems typically includes sampling and tracing.‣Sampling — The process of periodically stopping the profilee (the application under investigation during the profiling session), typically to collect backtraces (call stacks of active threads), which allows you to understand statistically how much time is spent in each function. Additionally, hardware counters can also be sampled. This process is inherently imprecise when a low number of samples have been collected.‣Tracing — The process of collecting precise information about various activities happening in the profilee or in the system. For example, profilee API execution may be traced providing the exact time and duration of a function call.Nsight Systems supports multiple generations of Tegra SoCs, NVIDIA discrete GPUs, and various CPU architectures, as well as various target and host operating systems. This documentation describes the full set of features available in any version of Nsight Systems. In the event that a feature is not available in all versions, that will be noted in the text. In general, Nsight Systems Embedded Platforms Edition indicates the package that supports Tegra processors for the embedded and automotive market and Nsight Systems Workstation Edition supports x86_64, IBM Power, and Arm server (SBSA) processors for the workstation and cluster market.Common features that are supported by Nsight Systems on most platforms include the following:‣Sampling of the profilee and collecting backtraces using multiple algorithms (such as frame pointers or DWARF data). Building top-down, bottom-up, and flat viewsOverviewas appropriate. This information helps identify performance bottlenecks in CPU-intensive code.‣Sampling or tracing system power behaviors, such as CPU frequency.‣(Only on Nsight Systems Embedded Platforms Edition)Sampling counters from Arm PMU (Performance Monitoring Unit). Information such as cache misses gets statistically correlated with function execution.‣Support for multiple windows. Users with multiple monitors can see multiple reports simultaneously, or have multiple views into the same report file.With Nsight Systems, a user could:‣Identify call paths that monopolize the CPU.‣Identify individual functions that monopolize the CPU (across different call paths).‣For Nsight Systems Embedded Platforms Edition, identify functions that have poor cache utilization.‣If platform supports CUDA, see visual representation of CUDA Runtime and Driver API calls, as well as CUDA GPU workload. Nsight Systems uses the CUDA Profiling Tools Interface (CUPTI), for more information, see: CUPTI documentation.‣If the user annotates with NVIDIA Tools Extension (NVTX), see visual representation of NVTX annotations: ranges, markers, and thread names.‣For Windows targets, see visual representation of D3D12: which API calls are being made on the CPU, graphic frames, stutter analysis, as well as GPU workloads(command lists and debug ranges).‣For x86_64 targets, see visual representation of Vulkan: which API calls are being made on the CPU, graphic frames, stutter analysis, as well as Vulkan GPU workloads (command buffers and debug ranges).Nsight Systems supports multiple platforms. For simplicity, think of these as Nsight Systems Embedded Platforms Edition and Nsight Systems Workstation Edition, where Nsight Systems Workstation Edition supports desktops, workstations, and clusters with x86_64, IBM Power, and Arm SBSA CPUs on Linux and Windows OSs, while Nsight Systems Embedded Platforms Edition supports NVIDIA Tegra products for the embedded and gaming space on Linux for Tegra and QNX OSs.Supported PlatformsDepending on your OS, different GPUs are supportedL4T (Linux for Tegra)‣Jetson AGX Xavier‣Jetson TX2‣Jetson TX2i‣Jetson TX‣Jetson Nano‣Jetson Xavier NXx86_64, IBM Power (from Power 9), or Arm SBSA‣NVIDIA GPU architectures starting with Pascal‣OS (64 bit only)‣Ubuntu 18.04 and 20.04‣CentOS and RedHat Enterprise Linux 7.4+ with kernel version 3.10.0-693 or later.‣Windows 10, 11CUDA Version‣Nsight Systems supports CUDA 10.0, 10.1, 10.2, and 11.X for most platforms‣Nsight Systems on Arm SBSA supports 10.2 and 11.X Note that CUDA version and driver version must be compatible.CUDA Version Driver minimum version11.045010.2440.3010.1418.3910.0410.48From CUDA 11.X on, any driver from 450 on will be supported, although new features introduced in more recent drivers will not be available.For information about which drivers were specifically released with each toolkit, see CUDA Toolkit Release Notes - Major Component VersionsRequirements for x86_64, Power, and Arm SBSAT argets on LinuxWhen attaching to x86_64, Power, or Arm SBSA Linux-based target from the GUI on the host, the connection is established through SSH.Use of Linux Perf: To collect thread scheduling data and IP (instruction pointer) samples, the Linux operating system's perf_event_paranoid level must be 2 or less. Use the following command to check:If the output is >2, then do the following to temporarily adjust the paranoid level (note that this has to be done after each reboot):To make the change permanent, use the following command:Kernel version: To collect thread scheduling data and IP (instruction pointer) samples and backtraces, the kernel version must be:‣ 3.10.0-693 or later for CentOS and RedHat Enterprise Linux 7.4+‣ 4.3 or greater for all other distros including UbuntuTo check the version number of the kernel on a target device, run the following command on the device:Note that only CentOS, RedHat, and Ubuntu distros are tested/confirmed to work correctly.glibc version: To check the glibc version on a target device, run the following command:Nsight Systems requires glibc 2.17 or more recent.CUDA: See above for supported CUDA versions in this release. Use the deviceQuery command to determine the CUDA driver and runtime versions on the system. the deviceQuery command is available in the CUDA SDK. It is normally installed at:Only pure 64-bit environments are supported. In other words, 32-bit systems or 32-bit processes running within a 64-bit environment are not supported.Nsight Systems requires write permission to the /var/lock directory on the target system.Docker: See Collecting Data within a Docker section of the User Guide for more information.x86_64 Windows T arget Device RequirementsDX12 Requires:‣Windows 10 with NVIDIA Driver 411.63 or higher for DX12 trace‣Windows 10 April 2018 Update (version 1803, AKA Redstone 4) with NVIDIA Driver 411.63 or higher for DirectX Ray Tracing, and tracing DX12 Copy command queues.Host Application RequirementsThe Nsight Systems host application runs on the following host platforms:‣Windows 10, Windows Server 2019. Only 64-bit versions are supported.‣Linux Ubuntu 14.04 and higher are known to work, running on other modern distributions should be possible as well. Only 64-bit versions are supported.‣OS X 10.10 "Yosemite" and higher.3.1. Finding the Right PackageNsight Systems is available for multiple targets and multiple host OSs. To choose the right package, first consider the target system to be analyzed.‣For Tegra target systems, select Nsight Systems for Tegra available as part of NVIDIA JetPack SDK.‣For x86_64, IBM Power target systems, or Arm SBSA select from the target packages from Nsight Systems for Workstations, available from https:/// nsight-systems. This web release will always contain the latest and greatest Nsight Systems features.‣The x86_64, IBM Power, and Arm SBSA target versions of Nsight Systems are also available in the CUDA Toolkit.Each package is limited to one architecture. For example, Tegra packages do not contain support for profiling x86 targets, and x86 packages do not contain support for profiling Tegra targets.After choosing an appropriate target version, select the package corresponding to the host OS, the OS on the system where results will be viewed. These packages are inthe form of common installer types: .msi for Windows; .run, .rpm, and .deb for x86 Linux; .deb and .rpm for Linux on IBM Power; and .dmg for the macOS installer. Note: the IBM Power and Arm SBSA packages do not have a GUI for visualization of the result. If you wish to visualize your result, please download and install the GUI available for macOS, x86_64 Linux, or Windows systems.Tegra packages‣Windows host – Install .msi on Windows machine. Enables remote access to Tegra device for profiling.‣Linux host – Install .run on Linux system. Enables remote access to Tegra device for profiling.‣macOS host – Install .dmg on macOS machine. Enables remote access to Tegra device for profiling.Getting Started Guidex86_64 packages‣Windows host – Install .msi on Windows machine. Enables remote access to Linux x86_64 or Windows devices for profiling as well as running on local system.‣Linux host – Install .run, .rpm, or .deb on Linux system. Enables remote access to Linux x86_64 or Windows devices for profiling or running collection on localhost.‣Linux CLI only – The Linux CLI is shipped in all x86 packages, but if you just want the CLI, we have a package for that. Install .deb on Linux system. Enables only CLI collection, report can be imported or opened in x86_64 host.‣macOS host – Install .dmg on macOS machine. Enables remote access to Linux x86_64 device for profiling.IBM Power packages‣Power CLI only - The IBM Power support does not include a host GUI. Install .deb or .rpm on your Power system. Enables only CLI collection, report can be imported or opened in GUI on any supported host platform.Arm SBSA packages‣Arm SBSA CLI only - Arm SBSA support does not include a host GUI. Install .deb or .rpm on your Arm SBSA system. Enables only CLI collection, report can beimported or opened in GUI on any supported host platform.3.2. Installing GUI on the Host SystemCopy the appropriate file to your host system in a directory where you have write and execute permissions. Run the install file, accept the EULA, and Nsight Systems will install on your system.On Linux, there are special options to enable automated installation. Running the installer with the --accept flag will automatically accept the EULA, running withthe --accept flag and the --quiet flag will automatically accept the EULA without printing to stdout. Running with --quiet without --accept will display an error. The installation will create a Host directory for this host and a Target directory for each target this Nsight Systems package supports.All binaries needed to collect data on a target device will be installed on the target by the host on first connection to the device. There is no need to install the package on the target device.If installing from the CUDA Toolkit, see the CUDA Toolkit documentation.3.3. Optional: Setting up the CLIAll Nsight Systems targets can be profiled using the CLI. IBM Power and Arm SBSA targets can only be profiled using the CLI. The CLI is especially helpful when scripts are used to run unattended collections or when access to the target system via ssh is not possible. In particular, this can be used to enable collection in a Docker container.Getting Started Guide Installation Guide v2022.3.4 | 9The CLI can be found in the Target directory of the Nsight Systems installation. Users who want to install the CLI as a standalone tool can do so by copying the files within the Target directory to the location of their choice.If you wish to run the CLI without root (recommended mode) you will want to install in a directory where you have full access.Once you have the CLI set up, you can use the nsys status -e command to check your environment.~$ nsys status -e Sampling Environment Check Linux Kernel Paranoid Level = 1: OK Linux Distribution = Ubuntu Linux Kernel Version = 4.15.0-109-generic: OK Linux perf_event_open syscall available: OK Sampling trigger event available: OK Intel(c) Last Branch Record support: Available Sampling Environment: OKThis status check allows you to ensure that the system requirements for CPU sampling using Nsight Systems are met in your local environment. If the Sampling Environment is not OK, you will still be able to run various trace operations.Intel(c) Last Branch Record allows tools, including Nsight Systems to use hardware to quickly get limited stack information. Nsight Systems will use this method for stack resolution by default if available.For information about changing these environment settings, see System Requirements section in the Installation Guide. For information about changing the backtrace method,see Profiling from the CLI in the User Guide.To get started using the CLI, run nsys --help for a list of options or see Profiling Applications from the CLI in the User Guide for full documentation.3.4. Launching the GUIDepending on your OS, Nsight Systems will have installed an icon on your host desktop that you can use to launch the GUI. To launch the GUI directly, run the nsight-sys executable in the Host sub-directory of your installation.。
EPSON RC+ 7.0 选件 Force Guide 7.0 SPEL+ Language Re
EPSON RC+ 7.0选件Force Guide 7.0 SPEL+ Language Reference Rev.5EPSON RC+ 7.0选件Force Guide 7.0SPEL+ Language ReferenceRev.5Copyright © 2015-2018 SEIKO EPSON CORPORATION. All rights reserved.Force Guide 7.0 SPEL+ Language Reference Rev.5 i前言感谢您购买本公司的机器人系统。
本手册记载了正确使用Force Guide 7.0所需的事项。
使用该软件时请仔细阅读本手册与其他相关手册。
阅读之后请妥善保管,以便随时取阅。
保修本机器人及其选装部件是经过本公司严格的质量控制、测试和检查,并在确认性能满足本公司标准之后出厂交付的。
在交付产品的保修期内,本公司仅对正常使用时发生的故障进行免费修理。
(有关保修期事项,请咨询您的区域销售办事处。
)但在以下情况下,将对客户收取修理费用(即使在保修期内):1.因不同于手册内容的错误使用以及使用不当而导致的损坏或故障。
2.客户未经授权进行拆卸导致的故障。
3.因调整不当或未经授权进行修理而导致的损坏。
4.因地震、洪水等自然灾害导致的损坏。
警告、小心、使用:1.如果机器人或相关设备的使用超出本手册所述的使用条件及产品规格,将导致保修无效。
2.本公司对因未遵守本手册记载的“警告”与“注意”而导致的任何故障或事故,甚至是人身伤害或死亡,均不承担任何责任,敬请谅解。
3.本公司不可能预见所有可能的危险与后果。
因此,本手册不能警告用户所有可能的危险。
ii Force Guide 7.0 SPEL+ Language Reference Rev.5商标Microsoft、Windows、Windows标识、Visual Basic及Visual C++为美国MicrosoftCorporation在美国和/或其它国家的注册商标或商标。
鸽子的折腾日记②丨Klipper的安装

使用浏览器访问此地址后,显示类似如下内容即表示安装成功:
{"error": {"code": 404, "message": "Not Found", "traceback": "Traceback (most recent call last):\n\n File \"/home/msoushi/moonraker-env/lib/python3.8/site-packages/tornado/w
更换Klipper、Moonraker的源
获取到源代码后,使用 cd kiauh 进入kiauh目录,此时不要急着安装,由于KIAUH脚本使用GitHub来获取代码,在国内可能会导致下载缓慢,所 以需要使用下列命令修改 kiauh.sh 和 scripts/install_moonraker.sh 中的地址,通过代理服务加速源代码的获取:
鸽子的折腾日记②丨Klipper的安装
序言
最近发现3D打印群里的越来越多人想去尝试Klipper固件了,想必它的可扩展性和易于配置吸引了不少人。加上近期百无聊赖,于是就想写出这样 一篇安装教程,供各位参考。
开始
首先,你需要一个装有Debian系操作系统(如Debian、Ubuntu、Raspbian、Armbian等)的设备(电脑、瘦客户机、树莓派、玩客云等 等……)。 在瘦客户机、电脑等安装Debian的方法可以参考本人的这篇教程。
其它系统(Debian、Raspbian等)可参照清华源提供的教程来更换软件源。 更换好软件源后,运行 sudo apt update 和 sudo apt upgrade 来更新系统。
_IC5141_Calibre_MMSIM安装
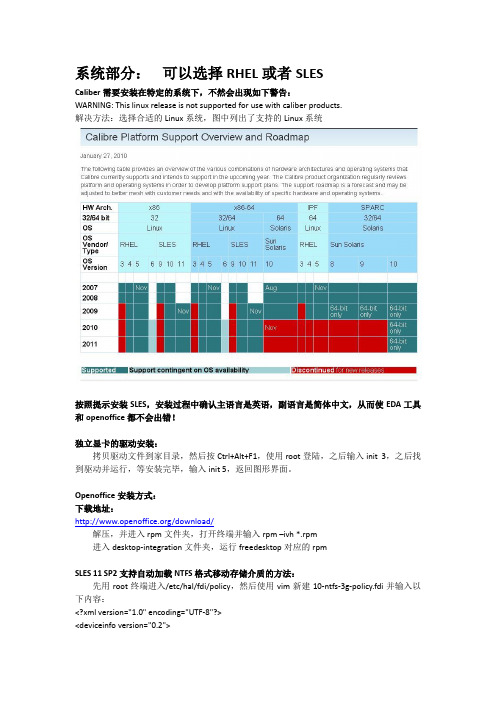
系统部分:可以选择RHEL或者SLESCaliber需要安装在特定的系统下,不然会出现如下警告:WARNING: This linux release is not supported for use with caliber products.解决方法:选择合适的Linux系统,图中列出了支持的Linux系统按照提示安装SLES,安装过程中确认主语言是英语,副语言是简体中文,从而使EDA工具和openoffice都不会出错!独立显卡的驱动安装:拷贝驱动文件到家目录,然后按Ctrl+Alt+F1,使用root登陆,之后输入init 3,之后找到驱动并运行,等安装完毕,输入init 5,返回图形界面。
Openoffice安装方式:下载地址:/download/解压,并进入rpm文件夹,打开终端并输入rpm –ivh *.rpm进入desktop-integration文件夹,运行freedesktop对应的rpmSLES 11 SP2支持自动加载NTFS格式移动存储介质的方法:先用root终端进入/etc/hal/fdi/policy,然后使用vim新建10-ntfs-3g-policy.fdi并输入以下内容:<?xml version="1.0" encoding="UTF-8"?><deviceinfo version="0.2"><device><match key="volume.fstype" string="ntfs"><merge key="volume.fstype" type="string">ntfs-3g</merge><merge key="volume.policy.mount_filesystem" type="string">ntfs-3g</merge><append key="volume.mount.valid_options" type="strlist">locale=</append></match></device></deviceinfo>然后再建立preferences.fdi并输入以下内容:<?xml version="1.0" encoding="UTF-8"?> <!-- -*- SGML -*- --><!--Some examples how to use hal fdi files for system preferencesYou can either uncomment the examples here or put them in a seperate .fdifile.--><deviceinfo version="0.2"><!--The following shows how to hint gnome-volume-manager and other programsthat honor the storage.automount_enabled_hint to not mount non-removable media.--><device><match key="storage.hotpluggable" bool="false"><match key="storage.removable" bool="false"><merge key="storage.automount_enabled_hint" type="bool">false</merge></match></match></device></deviceinfo>最后运行如下代码:/etc/init.d/haldaemon restart去下载最新的ntfs-3g源文件包ntfs-3g_ntfsprogs-****.tgz 解压,进入到解压文件夹并开启终端,在终端中依次输入:./configuremakemake install (此命令必须以root执行)等执行完毕,NTFS格式的移动硬盘就能像U盘一样自动挂载!IC5141部分:需要:base包和USR6 update包IC5141_bse包:ed2k://|file|Cadence.Base.IC5141.Lnx86.3CDs[.ck].rar|1201102747|A4DE108A291CC6BDD86D8E46D3E5 A677|h=PWYDUTUBIMHDVZ2EDLNMRNAKGAVIWJFA|/USR6_update包:/viewthread.php?tid=219912&highlight=USR6安装软件:解压和放置IC5141_base包和USR6_update包到/home/kury/cadence_install,文件夹分别命名为base和update。
CRF++使用小结(转)

CRF++使用小结(转)1. 简述最近要应用CRF模型,进行序列识别。
选用了CRF++工具包,具体来说是在VS2008的C#环境下,使用CRF++的windows版本。
本文总结一下了解到的和CRF++工具包相关的信息。
参考资料是CRF++的官方网站:CRF++: Yet Another CRF toolkit,网上的很多关于CRF++的博文就是这篇文章的全部或者部分的翻译,本文也翻译了一些。
2. 工具包下载第一,版本选择,当前最新版本是2010-05-16日更新的CRF++ 0.54版本,不过这个版本以前我用过一次好像运行的时候存在一些问题,网上一些人也说有问题,所以这里用的是2009-05-06: CRF++ 0.53版本。
关于运行出错的信息有/bbs/viewthread.php?action=printable&tid=7 945为证。
第二,文件下载,这个主页上面只有最新的0.54版本的文件,网上可以搜索,不过不是资源不是很多,我在CSDN上面下载了一个CRF++0.53版本的,包含linux和windows版本,其要花掉10个积分。
因为,我没有找到比较稳定、长期、免费的链接,这里上传一份这个文件:CRF++ 0.53 Linux和Windows版本。
3. 工具包文件doc文件夹:就是官方主页的内容。
example文件夹:有四个任务的训练数据、测试数据和模板文件。
sdk文件夹:CRF++的头文件和静态链接库。
crf_learn.exe:CRF++的训练程序。
crf_test.exe:CRF++的预测程序libcrfpp.dll:训练程序和预测程序需要使用的静态链接库。
实际上,需要使用的就是crf_learn.exe,crf_test.exe和libcrfpp.dll,这三个文件。
4. 命令行格式4.1 训练程序命令行:% crf_learn template_file train_file model_file这个训练过程的时间、迭代次数等信息会输出到控制台上(感觉上是crf_learn程序的输出信息到标准输出流上了),如果想保存这些信息,我们可以将这些标准输出流到文件上,命令格式如下:% crf_learn template_file train_file model_file >> train_info_file注意:运行train.exe或者test.exe时需要注意以下事情(就我个人情况来说):1.在cmd上来运行exe文件的,直接打开的话就会闪退。
LTR入门材料整理--小白学搜广推01

sigir2019-LTR-tutorial PPT链接地址: r.it/slides/ 搭配中文理解: 排序学习(LTR)杂谈 (下) https:///p/138436960
4. (2020-04)Transformer 在美团搜索排序中的实践: https:///2020/04/16/transformer-in-meituan.html 5. (2020-03)美团-WSDM Cup 2020检索排序评测任务第一名经验总结(多模融合排序检索): https:///2020/03/26/wsdm-2020-bert-lightgbm.html 6. (2019-01)大众点评搜索基于知识图谱的深度学习排序实践: https:///2019/01/17/dianping-search-deeplearning.html 7. 全面理解搜索Query:当你在搜索引擎中敲下回车后,发生了什么? https:///p/112719984 8. 漫谈搜索引擎 https:///p/99624706 ] LTR论文整理:
VSCode 如何编写运行 C、C++ 程序? - 谭九鼎的回答 - 知乎: https:///question/30315894/answer/154979413 几乎可以当作问题大全查看;
: VSCode实现C++多文件编译: 1. 命令行 : https:///qq_34801642/article/details/103770219?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.add_param_isCf&depth_1-utm_source=distribute.pc_relevant.none-task-bl 2. 基于MinGW: https:///u012030174/article/details/107791407?utm_medium=distribute.pc_relevant.none-task-blog-BlogCommendFromMachineLearnPai2-1.add_param_isCf&depth_1-utm_source=distribute.pc_relevant.none-task2.1 单纯修改tasks.json中的参数; VS Code:编译运行根目录下不同文件夹中的文件: https:///qq_34801642/article/details/106419763
详细图文IC5141安装说明

操作系统:CentOS-5.5-i386;虚拟机:VMwareWorkstation-6;软件:cadence ic5141 USR6和Base 1、安装CentOS-5.5,在软件定制部分需要立即定制,然后选择旧版支持,Java软件等等。
软件定制选择如下:桌面环境全选;应用程序全选;开发全选;基本系统全选;虚拟化全选;服务器选windows文件服务器,万维网服务器,打印支持。
2、由于CentOS-5.5的tar-1.15.1,sort-5.97,expr-5.97版本过高,需要用tar-1.14,sort-5.2.1,expr-5.2.1才能正常解压安装,而这几个程序可以在CentOS-4.8中找到。
之后,使用root账户登录,分别对应替换高版本的/bin/tar,/bin/sort,/usr/bin/expr。
此处记得备份CentOS-5.5的原件哦!(另外,我也给出了CentOS-4.8和CentOS-5.5中的程序,以便大家下载)3、新建一个用户kury(这个根据喜好,但此处我用kury说明),在/home/kury目录中新建文件夹cadence_install。
之后,在cadence_install里面新建文件夹base,update,用于存放IC5141的base 包跟update包。
base包在电驴上有:ed2k://|file|Cadence.Base.IC5141.Lnx86.3CDs[.ck].rar|1201102747|A4DE108A291CC6BDD86D8E46D3E5 A677|h=PWYDUTUBIMHDVZ2EDLNMRNAKGAVIWJFA|/USR6 update包在论坛里有:/viewthread.php?tid=219912&highlight=USR6此处需要说明,在CentOS-5.5下安装必须要有这两个包,不然不能运行cadence!!!4、解压:Cadence.Base.IC5141.Lnx86.3CDs[.ck] 得到三个base包,一个cadence_license_full.dat;解压:Update_IC50.46.006_lnx86得到四个update包。
exs迁移常见问题

已知问题vCenter Converter 4.2 版本包括以下已知问题:安装在从头安装 vCenter Converter 4.2 之前,必需从头启动运行 64 位 Windows Vista 或更高版本的运算机如果从 64 位 Windows Vista、Windows Server 2008 或 Windows 7 计算机上卸载 vCenter Converter 后没有重新启动计算机,则后续的 vCenter Converter 安装可能会失败,并显示以下错误消息:错误 29144。
无法安装服务 Vstor2 MntApi 1.0 Driver(共享)。
请重新引导并尝试再次安装 (Error 29144. Could not install service Vstor2 MntApi 1.0 Driver (shared). Please reboot and try to install again)。
解决方法:从头启动 Windows Vista、Windows Server 2020 或 Windows 7 运算机,然后尝试从头安装 vCenter Converter。
vCenter Converter 安装程序未发出任何通知即移除 Workstation 6.5.x 远程代理使用 Workstation 6.5.x 热克隆 Windows 源计算机时,Workstation 会在源上部署一个远程 Workstation 代理。
如果选择保留该源上的远程代理,然后将 vCenter Converter 4.2 安装在同一计算机上,则 vCenter Converter 安装程序将卸载该代理且不发出任何警告消息。
在远程热克隆进程中,vCenter Converter 4.2 无法安装 vCenter Converter 远程代理在对已安装 VMware Converter 3.x 代理的远程源计算机进行热克隆的过程中,vCenter Converter 4.2 无法安装其代理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Abstract
A system is described that tracks moving objects in a video dataset so as to extract a representation of the objects’ 3D trajectories. The system then finds hierarchical clusters of similar trajectories in the video dataset. Objects’ motion trajectories are extracted via an EKF formulation that provides each object’s 3D trajectory up to a constant factor. To increase accuracy when occlusions occur, multiple tracking hypotheses are followed. For trajectory-based clustering and retrieval, a modified version of edit distance, called longest common subsequence is employed. Similarities are computed between projections of trajectories on coordinate axes. Trajectories are grouped based, using an agglomerative clustering algorithm. To check the validity of the approach, experiments using real data were performed.
2. Estimation and Prediction of Trajectories
Objects and their trajectories must be extracted reliably from video sequences. We will need to find a model that is able to emulate the motion of an object in 3D space, which is robust enough to withstand to various influences exerted by the environment. Also, our model will have to take into account the noise injected by the capturing device. The approach presented here is based in large part on [7], with two extensions: 1.) occlusions are handled via multiple hypothesis tracking, 2.) under certain conditions we employ a ground-plane constraint in the estimation of 3D motion trajectories. The first step consists of initializing the system by collecting enough video frames for computing a statistical background model (mean and covariance of each pixel). After initialization, moving objects are segmented using maximum likelihood estimation. Next, binary image morphology and connected components analysis is employed to convert the foreground pixels that we got after segmentation into entities, blobs, bi(t), where t is the index of the current frame. The blobs that we get at this point represent the moving objects in the scene. Nevertheless, the results that we obtain may contain inaccurate information because of occlusions or similarity between the background and objects. In order to gain reliable estimates of the blob motion trajectories, we employ an Extended Kalman Filter (EKF). The trajectories associated with the moving objects are built step by step by matching blobs in the previous frame with the blobs in the current frame. For every frame we match each blob bi(t) of frame t with zero, one or more blobs bl(t-1) of frame t-1. In order to be able to estimate and predict the blob trajectory, we assign to each blob a tracker unit T j. A tracker unit is designed using the EKF described in [7]. The goal is that the tracker associated with each object will keep this association until the object disappears from the scene. The tracker’s role is important when blobs are occluded. In this case the information stored in a tracker unit will help us decide what hypothesis to follow. The trajectories will represent the output of this part of our system.
1. Inቤተ መጻሕፍቲ ባይዱroduction
This paper describes an approach for a computer vision problem: tracking multiple objects in video, estimating their 3D trajectories, and finding groups of similar motion trajectories via hierarchical clustering. The problem arises in a number of important applications, including surveillance and monitoring, remote sensing, transportation safety and traffic analysis systems, shopper flow analysis in stores, etc. Given the importance of the potential applications, there has been significant research activity directed towards solving problems related to tracking motion of multiple moving objects in video. A number of systems have been proposed for tracking moving objects and estimating their trajectories. For instance [1] use a Gaussian mixture model for modeling the background and detecting potential moving objects. They track moving blobs in consecutive video frames via a linearly predictive multiple hypothesis framework. The moving objects (cars, people) in the video sequence are tracked using Kalman filters. A different Kalman filter-based approach was employed in [4], where an active shape model modeled the contour of a person in each video frame. In [15] detection of moving objects is done using optical flow, and graph
Extraction and Clustering of Motion Trajectories in Video