转台数字化测控系统的设计
简易转台控制系统设计
简易转台控制系统设计
一、任务
转台是一种可以精密测量角度的设备。
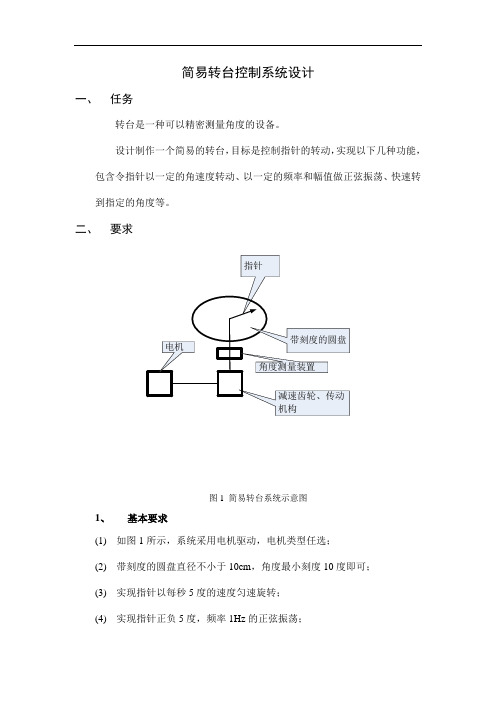
设计制作一个简易的转台,目标是控制指针的转动,实现以下几种功能,包含令指针以一定的角速度转动、以一定的频率和幅值做正弦振荡、快速转到指定的角度等。
二、要求
图1 简易转台系统示意图
1、基本要求
(1)如图1所示,系统采用电机驱动,电机类型任选;
(2)带刻度的圆盘直径不小于10cm,角度最小刻度10度即可;
(3)实现指针以每秒5度的速度匀速旋转;
(4)实现指针正负5度,频率1Hz的正弦振荡;
(5)实现指针正负10度,频率0.2Hz的正弦振荡。
2、发挥部分
(1)设置角度测量装置,测角精度至少0.5度;
(2)PID控制是最常用的闭环控制手段,其中P代表比例环节,它能调节整
个系统的增益,如果比例环节数值较大,系统跟踪常值指令时会出现
超调现象。
指针初始位置设置在0度,要求采用PID控制方法,使指
针角度快速变化到30度;
(3)将比例环节参数调大,令系统在完成(2)的过程中出现超调。
三、说明
(1)尽量使用STC公司的最新系列单片机产品。
(2)减速齿轮和传动机构可以省掉不设计,即电机轴可直接带动指针运动;(3)发挥部分(1)的角度显示可用上位机,也可用液晶屏。
四、评分标准。
两轴转台控制系统设计
两轴转台控制系统设计
两轴转台控制系统设计
转台系统是以控制论、相似原理、系统和信息技术为基础,利用计算机和专用物理设备等辅助工具,为飞行器实验提供平台的专用设备.不同的转台系统对控制精度有着不同的要求,本文在给定技术指标的要求下,利用PMAC运动控制器,为转台设计了一套PID控制方案.通过对转台进行建模、仿真,验证了所设计方案的可行性.最后,搭建电路并调试系统,实现了预期的要求.
作者:李亮孙力闫杰 Li Liang Sun Li Yan Jie 作者单位:西北工业大学航天学院,西安,710072 刊名:电子测量技术 ISTIC 英文刊名:ELECTRONIC MEASUREMENT TECHNOLOGY 年,卷(期):2009 32(2) 分类号:V448.25+3 关键词:转台系统 PMAC运动控制器 PID控制。
测控系统设计方式与步骤

➢转换灵活
• 模数转换与数模转换 • 信号形式的转换 • 量程的变换 • 信号的选取 • 信号处理与运算
测控系统设计方式与步骤
➢可靠性与经济性
• 测控电路越来越多地实时地用在各种系统中; • 测控电路越来越多地国防和高科技中; • 测控电路越来越多地用在医疗和其它与生命有关的
PT100温度检测电路
– 设计参数 1.测量范围:0℃~+100℃; 2.最小置入深度:热电阻的最小置入深度≥200mm; 3.允通电流 ≤ 5mA 4.最大非线性偏差小于0.5 摄氏度
– 涉及知识 1.直流电桥; 2.运算放大电路;
– 查阅资料 1.TL431资料; 2.LM358资料; 3.PT100资料;
• 实际电路设计
– DS18B20电路设计 – 显示电路设计 – 报警电路设计 – 多通道扩展 – 温度上下限扩展 – 参数设置扩展 – RS232通讯扩展
• 温控电路扩展
测控系统设计方式与步骤
测控系统设计方式与步骤
测控系统的设计方法及步骤
• 明确任务,找出关键参数 • 选择系统工作方式
– 开环模式 – 闭环模式
直流电机调速器
光电编码器
开关电源芯片
单片机
异或门
图3.2 所用的部分器件
测控系统设计方式与步骤
液晶模块
• 测速部分 • 模拟输出部分 • 电源部分
– 开关电源 – 线性电源
• 键盘部分 • 显示部分 • 复位部分
直流调速系统
测控系统设计方式与步骤
直流调速系统
• 测速方案
– 脉冲测速,无方向,单脉冲 – 脉冲测速,有方向(正交脉冲,脉冲-方向)
测控系统设计方式与步骤
某测试转台电控系统设计

— 稿 件 编 号 :0 2 2 8 2 10 0 8
作者简 介 : 田伟 强 (9 9 ) 男 , 南 荥 阳人 , 士研 究 生 , 17 一 , 河 硕 工程 师 。研 究 方 向 : 自动 控 制 。
72 -
田伟 强 某 测 试 转 台 电 控 系统 设 计
台 显 示 屏 上 ,另 一 路 连 接 至 显 控 台 上 的 视 频 输 出 B NC插 座 上 . 以将 目标 图像 直接 输 出 至靶 场监 视设 备 。 用 系 统 的 工 作 过 程 为 : 被 试 设 备 架 设 在 转 台 工 作 面 并 固 将 定 好 之 后 . 统 加 电 , 过 显 控 台 操 作 面 板 控 制 转 台 手 动 搜 系 通 索 目标 或 直 接 控 制转 台转 到 指 定 角 度 , 后 转 台 可 自动 锁定 然 主 控 解 算 模 块 需 要 根 据 情 况 向 俯 仰 电 机 发 送 解 除 抱 闸 的 信 号 。根据 要求 , 台转 动 范 围为方 位 一 8 ̄12 , 仰一 5^ 5, 转 12~ 8o俯 1。4。 | 为 确 保 安 全 , 机 械 限 位 装 置 外 转 台上 还 设 置 了 多 组 限位 监 除 测 开 关 , 台转 动 到 设 定 的 限位 位 置 时 , 应 的 限位 监 测 开 转 相
第 2 0卷 第 8期
Vo .0 12 No 8 .
电 子 设 计 工 程
El cr ni sg g n e i g e to c De i n En i e rn
21 0 2年 4月
Ap .2 2 r 01
某 测试 转 台 电控 系统设 计
田伟 强
( 国 电子科 技 集 团公 司 第 二 十 七研 究所 河 南 郑 州 4 0 4 ) 中 5 0 7 摘 要 : 出了 测 试 转 台 电控 系统 的组 成 , 重 讨 论 了伺 服 控 制 单 元 的设 计 , 细介 绍 了伺 服 主控 模 块 的 设 计 和 对 外 给 着 详 接 口 , 析 计 算 了转 台 负载 力 矩 , 由 此给 出 了伺 服 电机 的选 型 , 分 并 简要 介 绍 了 系统 的 电 源设 计 。 最后 研 制 出 了测 试 转
测控系统的智能化设计与实现方法

测控系统的智能化设计与实现方法在当今科技迅速发展的时代,测控系统在工业生产、科研实验、航空航天等众多领域发挥着至关重要的作用。
随着智能化技术的不断进步,测控系统的智能化设计与实现方法成为了研究的热点。
智能化的测控系统能够更高效、更精确地完成测量和控制任务,为各种复杂的应用场景提供可靠的支持。
测控系统的智能化设计首先需要明确其功能需求和性能指标。
例如,在工业生产中,可能需要对温度、压力、流量等物理量进行精确测量和控制,同时要求系统具有较高的稳定性和实时性;在科研实验中,可能需要对微小信号进行高精度检测和分析,并能够实现灵活的参数设置和数据处理。
明确这些需求和指标是设计的基础,有助于确定系统的整体架构和选用合适的技术方案。
在硬件方面,智能化测控系统通常由传感器、数据采集卡、控制器、执行机构等组成。
传感器负责感知物理量的变化,并将其转换为电信号;数据采集卡用于将传感器输出的模拟信号转换为数字信号,并传输给控制器;控制器根据预设的算法和策略对采集到的数据进行处理和分析,生成控制指令;执行机构则根据控制指令对被控对象进行相应的操作。
为了提高系统的性能和智能化水平,硬件的选型和配置至关重要。
例如,选择高精度、高稳定性的传感器,以及具有强大运算能力和丰富接口的控制器,可以为系统的智能化运行提供有力保障。
软件是实现测控系统智能化的核心部分。
通过编写高效、可靠的软件程序,可以实现数据采集、处理、分析、控制算法的实现以及人机交互等功能。
在数据采集方面,需要考虑采样频率、数据精度、滤波算法等因素,以确保采集到的信号准确可靠。
数据处理和分析则涉及到各种数学算法和统计方法,如傅里叶变换、小波分析、回归分析等,用于提取信号中的特征信息,识别异常数据,并对系统的运行状态进行评估。
控制算法的选择直接影响到系统的控制效果,常见的控制算法有 PID 控制、模糊控制、神经网络控制等,需要根据具体的应用场景和控制要求进行选择和优化。
人机交互界面的设计要简洁直观,方便操作人员进行参数设置、数据查看和系统监控。
转台控制系统设计
电磁骚扰是指任何可能引起装置、设备或系统性能降低或者对生命或无生命物质产生损害作用的电磁现象。
它可以通过辐射和传导两种方式转播,而辐射骚扰的测试必须要考虑可重复性、经济性、准确性、抗干扰性和快速定位。
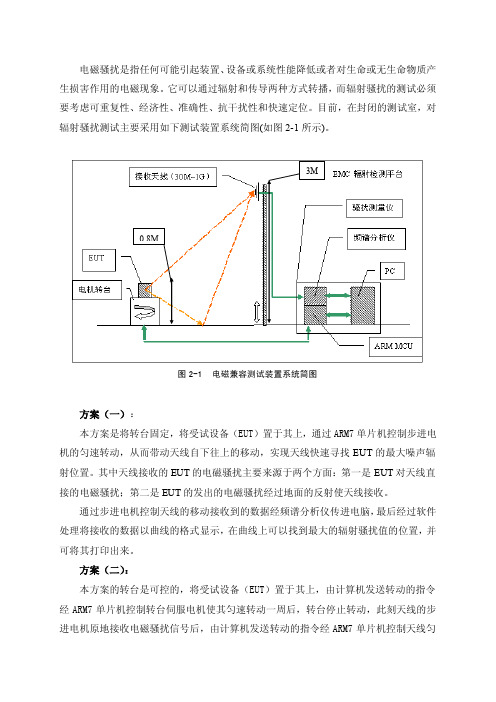
目前,在封闭的测试室,对辐射骚扰测试主要采用如下测试装置系统简图(如图2-1所示)。
3M0.8M图2-1电磁兼容测试装置系统简图方案(一):本方案是将转台固定,将受试设备(EUT)置于其上,通过ARM7单片机控制步进电机的匀速转动,从而带动天线自下往上的移动,实现天线快速寻找EUT的最大噪声辐射位置。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
方案(二):本方案的转台是可控的,将受试设备(EUT)置于其上,由计算机发送转动的指令经ARM7单片机控制转台伺服电机使其匀速转动一周后,转台停止转动,此刻天线的步进电机原地接收电磁骚扰信号后,由计算机发送转动的指令经ARM7单片机控制天线匀速向上移动,同时天线将接收到得信号经频谱分析仪处理后所得的数据,经过串口发给计算机,由计算机里测试软件以一定的算法、最快的速度处理数据,以此找到设备在该点的最大电磁骚扰值。
等天线向上移动1M后,由计算机的测试软件发出指令,使天线停止,同时让再次匀速转动一周,在转动中有天线接收EUT发出的电磁骚扰信号,后面的步骤如上所述。
当计算机读完四次数据时天线移动到最顶端。
测试完毕,由测试软件发出指令使天线回到原始位置,以便下次的测试。
其中天线接收的EUT的电磁骚扰主要来源于两个方面:第一是EUT对天线直接的电磁骚扰;第二是EUT的发出的电磁骚扰经过地面的反射使天线接收。
通过步进电机控制天线的移动接收到的数据经频谱分析仪传进电脑,最后经过软件处理将接收的数据以曲线的格式显示,在曲线上可以找到最大的辐射骚扰值的位置,并可将其打印出来。
精密数控分度转台的控制系统设计
仪 表 技ns r n tu nt c ni e n e o
201 0 No. 7
第 7期
精 密数 控 分度 转 台的 控 制 系统 设计
杨继森, 万文略 , 方 燕 , 郑 张天 恒
( 庆 理 工 大 学 机 械 检 测 技 术 与 装 备 教 育部 工 程 研 究 中 心 , 庆 重 重 40 5 ) 00 0
rANG i e , J— n WAN e - e, HEN F n —a ZHANG T a — e g s W nl Z u G a gy n, inh n
( nier gR sac e t f c a i l et gT c n lg n q ime t E gn ei ee rh C ne o h nc s n eh ooya dE up n , n r Me aT i
制 系统。该 系统采用步进 电机作为驱动装置 , 利用转 台中嵌入 的高精度 时栅 角位移 传感 器的角位移 测量数据 作为反馈 , 构成闭环控 制, 用分段控制 、 采 逐步逼近 的控制算 法, 达到 高速 、 高精 度分度定位的 目的 。实际应 用表 明: 该控制 系统的分
度 定 位精 度 达 到 ± ” 2。
s se w sd sg e n e e o e i h ih a v n e mb d e r c s o y t m a e in d a d d v lp d w t t e hg d a c d e e d d p o e s r h ARM. h tp moo ed v n q i me t a d T e s t ri t r i ge up n , n e sh i
te i ai oka l t id xa c rt yb r i eh n w el f o r bei sc n cl ,n e esr dut h me t gw r t e o n e c ua l y unn t a d h e o t yt l n e o ds a a di i n csa t a js t g n r b e t gh ra a e ts y O
航空转台通用控制系统设计与研究

航空转台通用控制系统设计与研究型、电机类型、编码器点数精确到具体转台。
下位机平台分为数据处理模块、位置跟踪模块、速率校准模块;上位机界面设有综合控制区、单轴控制区、角位置速率显示区、波形显示区。
软件系统由上下位机共同作用完成,可实现控制三个轴、任意两个轴或任意一个轴位置和速率等功能。
转台的精度控制基于误差控制理论,上位机给出的指令值与转台运转实际的反馈值之间的差值为误差,系统的精度目标就是使这个误差等于零,达到指令值等于反馈值。
该误差经过控制算法计算产生一个数字电压值,通过DA 转换为模拟电压输出给电机驱动器,电机驱动器根据给定的电压驱动转台各轴的电机,实现对电机的控制。
利用MATLAB 仿真环境,建立仿真模型,搭建算法控制器,通过算法不断计算,推导出最优的参数组合,实现控制系统的精确控制。
3 通用控制系统原理分析3.1 通用控制系统控制结构通用控制系统主要由电流环闭合回路与位置环闭图2 控制回路图1 控制系统结构图图3 数字PID 控制器原理图图4 通用转台软件结构框图调试程序通过对转台控制系统进行参数整定,根据PID控制算法调节系统的数学模型,通过定点试验方法分别找出最合理的KP与KI数值,得到最完美的算法模型,调试过程通常采用一个参数不变调试另一个参数的办法,不断根据测试状态缩小的数值,且每台转台每轴都需要提前进行大量的调试,调试出固定参数,将得到的数学参数烧写到DSP+FPGA组合控制模块。
控制程序根据已经固定的数学参数模型,通过DSP+FPGA组合控制模块对控制系统执行元件输送特定的命令,并通过DA数字信号转换为模拟信号,此信号作为电机驱动器输入,控制着电机驱动器对相应的电机进行指令控制,控制转台按照控制程序给出的控制指令进行运动,从而实现控制转台的速度、位置、模式、状态写入的功能,此前根据转台的差异性选择不同的转台,同时,程序也会进行判读是否转台选择正确,根据反馈数据分析出问题所在,给出错误提示,及时进行位置制动,防止出现图5 通用转台控制系统界面图结语通过将通用控制系统进行台体选型、电机选型、编码器选型区分出控制台体类型;通过将通用控制系统进行分模块设计,实现任意一轴单独运转、任意两轴运转及三轴连续运转,实现多轴精确定点控制;通过给出任意一轴目标位置及目标速度,实现台体定速、定点运行。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
转台数字化测控系统的设计汤 辉 费业泰合肥工业大学摘 要:介绍了由传统机械式转台升级改造为数字转台的不同方案;设计了以AT89C51为核心、采用旋转编码器输出信号倍频和辨向、计数键盘控制、角秒级LE D显示及四相步进电机控制电路构成的测控系统,采用该测控系统可以低成本地进行转台数字化改造。
关键词:转台, 旋转编码器, 步进电机, 单片机Design of Measuring and Controlling System of Digital PlatformT ang Hui Fei Y etaiAbstract:The different schemes to change the mechanical platform to the digital one are introduced.The measuring and controlling system is designed in which the AT89C51is regarded as the core,including circuits for timing the frequency and distin2 guishing the direction of the output waveform of the rotary encoder,for counting and controlling the keyboard,for the LE D display on the second grade,and for controlling the four phases stepper m otor.The application of the measuring and controlling system can success fully reconstructing the digital platform with low cost.K eyw ords:platform, rotary encoder, stepper m otor, MC U 1 引言随着现代工业自动化程度的不断提高,为满足生产需求,许多传统的纯机械产品都要求进行数字化、自动化改造。
回转台在机械加工和测量领域中应用非常广泛,其性能好坏将直接影响加工和测量的质量。
回转台的工作原理是利用上下转盘等分齿数相互交错来实现一定精度的回转,等分的齿数越多,精度越高,但同时加工难度也越大,价格越昂贵。
所以,迫切需要在低成本条件下实现传统转台的数字化、智能化和高精度。
2 改造方案选择传统转台传动件和定位件合一的特点对产品的机械精度要求很高,而修复性能较差,这一点是数字化改造的关键问题。
数字化转台应具备三个要素:圆分度传感器、高精度控制系统和误差分离与修正系统。
其中,圆分度传感器可以选择(柱面)光栅、旋转编码器、角度编码器或感应同步器等;控制系统可采用步进电机或伺服电机;而实现误差分离与修正则需要进行误差检测试验,通过多面棱体和光电自准直仪测得的采样点误差数据,拟和三次样条曲线,采用插补算法,达到误差修正的目的。
211 数字化转台改造方案的特点(1)方案一:采用高精度元件,例如角度编码器和高精度伺服电机。
采用这个改造方案,从原理上可以一次达到较高的精度,但是改造成本很高(甚至会超过改造前传统机械转台的价格),同时对安装也有较高的要求;(2)方案二:采用一般精度元件,例如旋转编码器(或柱面光栅)和步进电机。
采用该方案虽不能一次达到较高精度,但是改造成本低,并可通过高精度测试手段,以软件方式进行误差修正,达到提高转台定位精度的目的。
212 改造方案的选择无论采用哪一种方案,所选用的圆分度传感器精度和控制元件精度以及误差分离精度都必须匹配,以免造成精度浪费。
考虑到在低成本条件下实现传统转台的数字化并提高精度的目的,本次数字化转台改造采用方案二:取消传统转台制造成本较高的传动分度定位件,在主轴上安装数字圆柱光栅(或旋转编码器)作为回转分度定位件,保留一般精度的蜗轮蜗杆传动副,由步进电机控制蜗杆以实现一定精度的步距角,配合误差修正技术,实现高精度回转。
转台改造原理如图1所示,测控电路系统框图如图2所示。
3 测量电路系统以常用单片机AT89C51-24PC为核心。
在实际改造中,采用了K OY O公司的TRD2SH2500B旋转编码器,其每转NPN集电极开路输出2500个脉冲信号,负逻辑有效,共有三路输出(见图3),其中,A、86工具技术收稿日期:2005年3月B 相位相差90°,用于后续电路辨别旋转方向以及信号四倍频;Z 相是零位输出,用于消除累计误差。
图1 转台改造原理图图2 测控电路系统框图图3 旋转编码器输出信号在一般应用场合中,都要对旋转编码器输出信号进行倍频处理,以达到提高测量精度的目的。
随着计算机技术的发展,已开发出许多编码器输出信号倍频技术(如时钟脉冲细分技术、量化细分技术等),但这些细分技术对信号都有较高要求,如时钟脉冲细分要求输入信号频率必须是稳定的,而量化细分则要求信号幅值稳定、准确。
因此,考虑到转台应用的各种场合信号变化复杂,本系统首先采用最基本、最可靠的四倍频方法,使转台一周的实际细分数达到10000。
其原理是利用两路相位相差90°的脉冲信号,在一个整周期里,可以分别捕捉到4个上升沿和4个下降沿,由此达到四细分的目的。
集成电路芯片ST289AX4在完成信号细分的同时,也可以辨识旋转方向,使倍频后的信号分正反两路输出,大大简化了电路。
当然,如果期望达到更高精度,可以选用线数更多的编码器或者柱面光栅,也可以使转台固定应用于某一场合,这样信号形式相对比较稳定,再对其采用适当的细分方法。
为了达到此目的,在四倍频的基础上又增加了可选的脉冲细分倍频方法,根据应用场合,通过键盘选择决定是否在测量中加入这种细分。
脉冲细分技术适用于匀速运动测量对象,利用微机时钟的高频率,把位移信号测量转化为高精度的时间测量,主要依靠软件达到细分的目的,几乎不需要增加任何附加的硬件。
脉冲细分原理见图4:方波信号是旋转编码器旋转角位移输出信号,角位移Φ由Φ0、Φ1、Φ2三部分组成。
其中Φ0=N θ为计数器记下的整周期旋转编码器转过的角度(N 为计数器的整周期计数值);Φ1、Φ2是小于一个周期方波代表的角位移值,它们的计数依靠微机内部的计数器来完成,即由填入的计时脉冲数得到T x1、T x2;整周期T 0也是通过计数微机时钟脉冲得到。
图4 脉冲细分原理由Φ0=N θΦ1=T x 1T 0θΦ2=T x 2T 0θ则Φ=Φ0+Φ1+Φ2=Nθ+T x 1T 0θ+Tx 2T 0θ式中 θ———旋转编码器刻线间距角,如TRD 2SH2500B 输出信号θ=3604×2500=01036°T x1———起始阶段转过Φ1所用时间T x2———结束阶段转过Φ2所用时间T 0———编码器转过一个刻线所用时间在上述脉冲细分方法中,假设转台在整个过程中是匀速转动的,旋转编码器输出的方波信号周期也是稳定的。
当然,完全满足这种假设条件的实际应用几乎是不存在的,但是在现代工业的某些应用场合中,在一定的精度要求下,这种细分方法依然具有其应用价值。
因此在本次转台数字化改造中,加入了这个可选项,由用户根据应用场合选择采用。
因此,利用AT89C51定时器T 0对倍频后的脉冲信号计数。
由于AT89C51晶振可以达到24MH z ,所以T 0的最高计数频率为1MH z ,转台最高转速可962005年第39卷№11达到600r/min ,能够满足大部分的应用场合。
LE D 显示和键盘控制采用传统的I NTE L8279集成控制。
用7位LE D 实现角秒级显示与实时显示,键盘控制则实现了转台启停、转角、方向、控制方式(远控和本控)选择。
另外,考虑到产品的远控,增加了RS232串口,采用M AX232转换芯片,使上位机可以实时显示转台转角,并接收上位机发出的控制转角信号。
4 步进电机控制通过对机械转矩的分析,选用86BYG 201四相步进电机,本系统采用L297+L298+L6210的驱动控制方案。
早期的步进电机驱动及控制都是采用大量分立元件构成模拟控制电路,这种方式调试难度较大且可靠性不高。
随着集成电路的飞速发展,已经出现了多种步进电机专用控制芯片,这不仅方便了步进电机控制及驱动器的设计,同时也大大提高了系统的可靠性。
L297是集成环形分配器,它可以产生四相驱动信号,适用于微机控制系统中对两相双极和四相单极步进电机的驱动。
L297使用很方便,只占用单片机3个I/O 口,分别控制脉冲输出、方向选择及控制模式选择。
通过硬件实现脉冲环形分配,大大减轻了单片机程序的处理负担。
L298是一种高电压、大电流双全桥驱动集成芯片,用于接收标准TT L 电平以驱动电感负载(如继电器、电磁线圈、直流电机和步进电机等)。
其驱动电流为4A ,工作电压可达到46V 。
每个桥的三极管射极连在一起,外接线段可用来连接外部传感电阻。
L6210是一款集成两组八个硝特二极管芯片。
因为在双极性步进电机控制中,电流较大,要求电压翻转速度很快。
L6210具有4A 的峰值电流,因而在步进电机驱动控制中应用很普遍。
图5 步进电机驱动控制 5 软件设计软件包括以下几部分:键盘扫描及LE D 显示子程序、旋转角度输入子程序、电机启停子程序、脉冲细分子程序及串口通信子程序等。
系统主程序流程图如图6所示。
图6 主程序流程图 6 结语对传统机械式转台进行数字化改造,不仅使产品适应了现代工业发展,同时也降低了制造成本,由于所采用技术均已成熟,开发成本也较低。
当然,不同的应用场合对转台的精度会有不同的要求,在转台数字化改造的后续工作中,可以对影响旋转精度的因素进行分析,采用图1所示方法,并通过软件进行误差修正,以达到提高转台精度的目的。
参考文献1 费业泰.误差理论与数据处理.北京:机械工业出版社,2002,58~792 张国雄.测控电路.北京:机械工业出版社,2001,57~983 魏立君,韩华琦.C M OS 4000系列60种常用集成电路的应用.北京:人民邮电出版社,1993,125~2224 万福君,潘松峰.单片微机原理系统设计与应用.合肥:中国科学技术大学出版社,2001,221~2405 吴金戌,沈庆阳等.8051单片机实践与应用.北京:清华大学出版社,2002,83~1186 陈理璧.步进电动机及其应用.上海:上海科技出版社,1993,84~927 孟 超,费业泰.光栅信号时钟脉冲细分技术的误差分析.宇航计测技术,1996(6):6~9第一作者:汤 辉,硕士研究生,合肥工业大学仪器仪表学院,230009合肥市7工具技术。