三轴转台仿真设计---设计说明书
三轴仿真转台控制系统的设计

三轴仿真转台控制系统的设计作者:孙克诚王琪来源:《无线互联科技》2015年第18期摘要:文章介绍了一种无人机飞行半物理仿真平台的控制系统,本系统是以ARM处理器为核心控制器,采用模块化设计的方法,设计了一个三轴转台控制系统。
系统采用PC机与下位机两级控制,使用积分分离式的PID控制算法,对三轴转台进行精确控制。
控制系统能控制三轴转台转动并对平台上捷联惯导系统姿态信息进行实时测量,保存和显示。
关键字:三轴转台;PID算法;STM32;姿态控制;捷联惯导系统;近些年来,随着现代战争的日益发展,无人机也因其无人驾驶的独特性能得到各国的重视与关注。
飞行仿真转台能够真实地模拟出无人飞行器的动力学特性,在实验室中就能对飞行器的飞行姿态进行仿真,是检测无人飞控系统性能以及进行半物理仿真实验的重要装置。
三轴转台的控制精度直接影响了仿真或调试、检测的结果,因此,三轴转台的控制系统设计往往决定了转台的质量。
本文结合实际设计了一种可实时测量平台上传感器数据的飞行仿真转台控制系统。
1系统结构及总体方案设计本三轴转台控制系统由惯性传感器模块、STM32微控制电路、OLED显示模块、按键输入模块、步进电机驱动模块、RS 232串口通信模块、编码器数据采集模块等部分组成。
系统整体结构框图如图1所示。
惯性传感器系统采集到原始信号,通过I2C总线发送给STM32微控制器,STM32控制器运用捷联惯导算法处理惯性传感器获得的数据,解算出转台的实时姿态。
在LCD液晶显示屏上实时显示姿态参数,另外使用MAX3232将TTL电平转换成RS232电平,再与PC机的COM口连接,并将姿态数据打包成固定格式的串口数据包,通过串口发送给上位机软件,在PC端上位机软件实时动态显示姿态参数和波形曲线。
在上位机软件上可以控制三轴平台的状态,模拟无人机的俯仰、翻滚、航向三轴方向上的姿态控制,控制信息通过COM口发送给STM32控制器,编码器模块采集三轴平台的转动数据经过PID算法处理后反馈给驱动电路控制步进电机转动,提高了三轴转台的转动精度。
三轴雷达仿真转台设计
摘要三轴雷达仿真转台是三轴转台的一种,本次设计的三轴雷达仿真转台主要用于某型机载雷达的测试。
转台性能的优劣直接关系到仿真和测试试验的可靠性,是保证某型机载雷达的精度和性能的基础。
本文针对三轴雷达仿真转台的机械结构设计进行了详细的讨论,并进行了理论论证及必要的计算,同时对本转台中使用到的测量元件及联轴器等其他原件的结构及原理作了简单的介绍,设计中采用铸铝合金作为台体的材料,实现了低转速、高精度的要求,并且减轻了整体的重量,使机构在满足:转角范围、速度范围、最大角加速度等设计参数要求的前提下,使结构设计尽量优化。
本设计紧紧围绕着设计任务书中的各项指标,从内环开始至外环一步一步地展开设计。
本文主要内容包括转台的总体结构论证、转台的详细结构设计、转台的误差分析等。
结合转台设计的特点,本文重点讨论了转台机械结构的设计思想及设计过程。
关键词:三轴仿真转台;机载雷达;测量元件;联轴器:内环:中环:外环。
ABSTRACTThree shafts radar simulation turntable is one type of the three shafts turntable . The three shafts radar simulation turntable in this design is mainly used to test a certain type of airborne radar. The simulation turntable has great influence on the reliability and credence of experimentation,so the precision accuracy of a certain type of airborne radar is based on simulation turntable.This paper discusses detailedly the design of mechanical structure of the three shafts radar simulation turntable . Then uses the principle to demonstrate it and do the necessary calculation . At the same time, introduce the principle and structure of measurement components and clutch and other components used in the turntable in brief . This design closely revolves around every targets in design assignment,and spreads out from inner frame to outer frame step by step. The chief content of this paper involves the demonstration of the general structure , the design of the detailed structure and the analysis of error of the turntable. Combining the designing character of the turntable ,this paper emphatically discusses the idea and the process in designing the turntable.Key words:;Three Axis simulation turntable;Airborne radar;Measuring element;Coupling;Inner ring;Central;Outer ring目录摘要 (1)第1章绪论 (5)1.1课题背景 (5)1.2.1 智能扫描机械台的发展状况 (5)1.2.2 国内智能扫描机械台的发展状况 (7)1.2.3 未来转台的发展趋势 (8)1.3 立题的目的和意义 (8)1.4 本文主要工作 (8)第2章智能扫描机械台总体设计 (9)2.2总体设计流程 (9)2.3转台类型的确定 (9)2.4转台运动功能设计 (10)2.4.1 工作原理 (10)2.4.2 运动功能方案 (10)2.5转台总体布局设计 (10)2.6转台主要参数设计 (11)第3章智能扫描机械台机械结构详细设计 (12)3.1转台内环结构设计 (12)3.1.1 结构设计 (12)3.1.2 转矩计算 (13)3.1.3轴向固定方式的选择 (14)3.1.4轴的最小直径的确定 (15)3.1.5轴承的选择 (15)3.1.6轴承的固定与密封 (15)3.1.7内框轴与负载盘的联接方式 (16)3.1.8 主要零件刚度校核 (17)3.1.9 电机转矩的校核 (18)3.2转台中环结构设计 (19)3.2.1 结构设计 (19)3.2.2 转矩计算 (20)3.2.3 电机转矩校核 (21)3.3转台外环结构设计 (21)3.3.1 结构设计 (21)3.3.2 转矩计算 (21)3.3.3 电机转矩校核 (23)3.4机械转角限位装置设计 (23)第4章误差分析 (26)4.1回转精度分析 (26)4.1.1 滚动轴系回转精度 (26)4.1.2 俯仰轴系回转精度 (26)4.1.3 方位轴系回转精度 (27)4.2三轴相交度分析 (27)4.2.1 滚动轴与俯仰轴的相交度 (27)4.2.2 俯仰轴与方位轴的相交度 (28)第5章测量及其它元件简介 (29)5.1直流无刷电机 (29)5.2感应同步器 (30)5.3绝对式光电码盘 (30)5.4钢丝滚道轴承 (31)5.5胀紧式联轴器 (32)结论 (33)参考文献 (34)致谢 (33)第1章绪论1.1 课题背景远古时代,人类的祖先面对着充满神秘色彩的天空,编织出许多美丽、动人的神话、传说故事。
小型无人机三轴飞行仿真转台设计

人机 控 制 系统 的研 究提 供 了一个 地 面半仿 真 实验 的平 台 。 关 键 词 :三轴 转 台;结构 设 计 ;步 进 电机 ;控 制 系统 中图 分类 号 :T J 8 5 文献 标 志码 :A
De s i g n of a 3 一 Axi s Fl i g ht Si mu l a t o r f o r a Sm a l l UAV
2 0l 3— 1 1
兵 工 自动 化
Or d n a n c e I n d us t r y Aut o ma t i o n ・7 3・
3 2 ( 1 1 1
d o i :1 0. 76 9 0 / b g z d h . 2 01 3 . 1 1 . 0 2 0
0 引 言
小 型 无 人 机 具 有 噪 音 低 、 目标 小 、 效 费 比高 、 雷达信 号弱 、 机 动 性 强 等 特 点 ,对 起 降条 件 限 制 小 , 特别适 合在特殊环境 下使用 。 对 于小型无人机 而言 ,
良好 的 飞 行 控 制 系 统 至 关 重 要 。 小 型 无 人 机 的机 动 性 和 执 行 任 务 的 能力 很 大 程 度 上 取 决 于 其 飞 行 控 制 系统 的设计水平 。
f l i g h t s i mu l a t o r i s d e s i g n e d f o r t h e r e s e a r c h o f a s ma l l UAV.Pe r f o r ma n c e i n d e x a n d s t r u c t u r e o f li f g h t s i mu l a t o r i s
三轴转台控制系统校正与仿真设计
辉
葫芦 岛 15 0 ) 2 0 1
摘
要
做为一种用于特定研究 目的的试验和测量系统 , 三轴转 台存在着 内部和外部各种各样 的误差 因素。文章针对
主要误差源之一的三轴 转台控制系统进行 校正 , 并对校正后 的系统做计算机仿真 , 有效提高 了系统精度 , 满足 了模拟试验需
求。
关键词
t ewo k r q ie e t h r e urm n. Ke o d t r e a i u n a l ,c n r 1s s e ,c mp t re lt n y W r s h e - x s t r t b e o t o y tm o u e mu a i o Cls m b r TP1 a s Nl e 3
g/ 为 电气 时间常 数 。 r 转 台伺 服 系 统 的 被 控 对 象 比较 复 杂 , 果 把 如 诸如摩 擦 、 力矩 干 扰 等 对 控 制 不 利 的 问 题 都 集 中 到位 置 环 来解 决 , 很 难 实 现 要 求 的性 能 指 标 。 则
*
收 稿 日期 :0 9年 1 20 2月 1 7日, 回 日期 :0 0 1月 2 日 修 21年 0
响应输人信号的快速性 , 提高系统 的频带宽度, 可
以加快 系统 的响应 速度 ; 对 数字 测角装 置应 有 足够快 的反 应 速度 , 并对
其 中 一 ( ) ( r・ / K ・ ) K 为机 电时 间常数 , 一
采取相 应措施 尽 可能 的消 除各类 误 差 源 , 进 行模 是 拟试验研 究过 程 中十分 重要 的环 节 , 于提 高 转 台 对 精 度具 有十分 重要 的意 义 。 通 过分 析三轴 转 台 的结 构原 理 , 并经 过 具 体 的
三轴仿真转台上位机软件设计
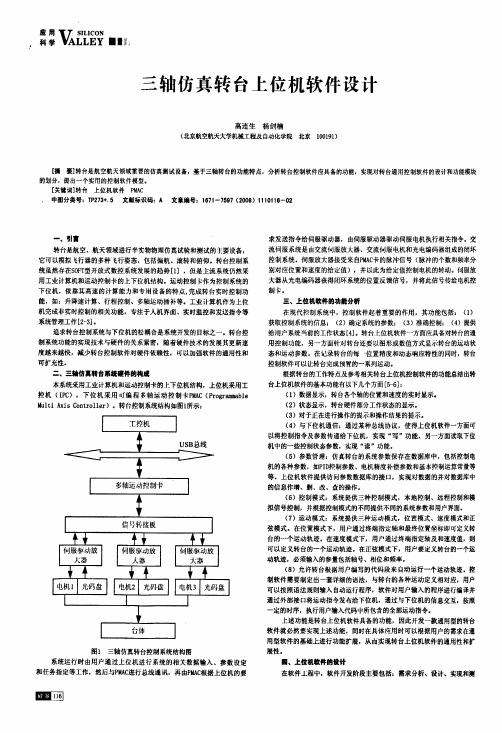
求发 送指 令给 伺服 驱动 器, 由伺 服驱 动器驱 动伺 服电 机执 行相 关指 令。 交 流伺 服系 统是 由交 流伺 服放 大器 、交 流伺服 电机 和光 电编 码器 组成 的闭 环 控制系统。伺服放大器接受来QPMAC卡的脉冲信号( 脉冲的个数和频率分 别对应位置和速度的给定值) ,并以此为给定值控制电机的转动。伺服放 大器 从光 电编 码器 获得 闭环 系统 的位 置反馈 信号 ,并 将此 信号 传给 电机 控 制#。
[ 关键词] 转台上位机软件PMAC 中图分类号:TP273+.5 文献标识码: ^ 文章编号;1671 - - 75 97( 2 008 ) 111 0116 一02
一 、弓 I一 转台是 航空、航 天领域进 行半实物物 理仿真试 验和测试 的‘t 要设 备, 它可以模拟b行器的多种飞行姿态,包括偏航,滚转和俯仰。转台控制系 统虽然存在SOFT型开放式数控系统发展的趋势[ 1] ,但是土流系统仍然采 用 工业 计算 机和 运动 控制 卡的 上下 位 机结 构。 运动 控制 膏作 为控 制系 统的 下 位机 ,依 靠其 高速 的计 算能 力和 专 用设 备的 特点 ,完 成转 台实 时控 制功 能 ,如 ;升 降速 计算 、行 程控 制、 多 轴运 动插 补等 。工 业计 算机 作为 上位 机 完成 非实 时控 制的 相关 功能 ,专 注 于人 机界 面, 实时 监控 和发 送指 令等 系统管理工作[2—3]。 追求 转台 控制 系统 与下 位机 的松 耦合是 系统 开发 的目 标之 一。 转台 控 制 系统 功能 的实 现技 术与 硬件 的关 系 紧密 ,随 着硬 件技 术的 发展 其更 新速 度 越来 越快 ,减 少转 台控 制软 件对 硬 件依 赖性 ,可 以加 强软 件的 通用 性和 可扩充性。 :、 三轴 仿真转 台系 统硬件 的构 成 本系 统 采用工 业计 算机 和运 动控 制卡 的十 下位 机结 构, 上位 机采 用工 控机( I PC) , 下位机采用 町编程多轴 运动控制 卡PMAC( Pr ogr ammabl e Mul t i Axi s Con t r ol l er ) 。 转台控 制系 统结构 如图 l 所示 :
三轴飞行仿真转台控制系统设计

三轴飞行仿真转台控制系统设计路平;刘凯;王龙【摘要】为实现转台的高精度控制,设计了转台数字控制系统.该控制系统以MSP430单片机为控制核心,采用模块化的设计理念和开放式的结构形式,设计了转台控制系统的硬件电路,并对其功能和原理进行了论述.以VC+ +6.0为开发环境,设计了控制系统的上位机软件结构;以IAR EW 5.0为开发环境设计了控制系统的下位机软件结构.为验证控制系统的性能,进行了控制实验,结果表明:系统控制效果良好,达到了预期效果.【期刊名称】《传感器与微系统》【年(卷),期】2016(035)009【总页数】5页(P110-113,117)【关键词】三轴转台;控制系统;硬件电路;软件设计【作者】路平;刘凯;王龙【作者单位】军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003;军械工程学院无人机工程系,河北石家庄050003【正文语种】中文【中图分类】TP273三轴飞行仿真转台是一种在航空、航天等领域中进行模拟、仿真、测试等相关实验的半实物仿真设备,可以通过对三个框架实施不同的运动,模拟飞行器在空中的各种飞行动作和姿态变化,军事和民用价值日益突出。
转台的内、中、外三个框架分别模拟飞行器的滚转、俯仰、偏航运动[1]。
超低速、宽调速、高频响、高精度是仿真转台最重要的技术指标,设计合理的控制系统是实现转台技术指标的关键,关系到仿真结果的优劣[2]。
转台控制系统作为转台系统的核心部件,主要用于控制转台转动,实现转台的飞行仿真功能。
本文设计了一种基于MSP430单片机的转台数字控制系统,从硬件设计、软件设计和系统调试与转台控制实验三个方面对搭建的转台数字控制系统进行了较为详尽的阐述。
通过数字控制器实现对转台的闭环控制,控制策略采用软件程序实现,具有结构简单、控制精度高、抗干扰能力强、可靠性高等特点,控制效果良好。
转台控制系统的设计思路是采用人机交互界面的形式,实现转台指令的收发以及转台的检测;通过下位机即转台的数字控制器实现对转台的高精度控制。
三轴虚拟仿真转台系统设计及实现_刘正华

作者简介: 刘正华, 北京航空航天大学博士研究生, 研究方向: 虚拟样机, 建模与仿真, ,() 2 0’( 2 0’5 。
计算机工程与应用
!""#$%&
!N
箱中提供了简单的线性控制模块和滤波模块, 可以方便地实现 前置滤波、 ’() 控制和其他连续时间系统的模拟仿真。 另 一 种 方法是使用 *+,-.+/ 模块,将机械系统仿真分析工具同控制设 计仿真软件有机地联系起来, 最终实现整个虚拟样机系统的设 计与开发。在实际系统开发中, 后一种方法可以很方便将机械 模型与先进控制率有机结合起来, 进行联合仿真; 同时可以简 化数学模型的建立,最终获得该控制率下的机电联合仿真结 果。 该文正是采用后者方法, 建立起虚拟转台系统模型, 通过加 载控制率进行机电联合仿真分析, 最终输出分析结果。
调用接口, 将转台零件图形库调入软件平台实现模型装配; 再通过 ’(’)* 与 )’KL’M 软件之间的仿真接口, 将控制器 调入转台样机; 最终实现机械模型和控制方法的联合仿真分析, 获得虚拟转台的特性, 包括样机传函和三框运行动 静 态 精度等特性状况。 关键词 虚拟仿真转台 虚拟样机 虚拟装配
虚拟仿真转台联合仿真分析及其实验结果
该 文 利 用 0)012 软 件 实 现 了 三 轴 虚 拟 仿 真 转 台 的 设 计
与开发。通过先对转台样机进行模态分析( 该文仅以某型转台 , 内框作为研究对象) , 获 得 该 型 转 台 内 框 名 义 传 递 函 数 ! "( #) 见公式( ; 同 时 利 用 24BC/4,D 设 计 系 统 ’) 参 数 及 前 馈 传 递 %) , 取名义传函的倒数, 且 % 取值为 "$& 。然后将 函数 ! $ ( #) ! $( #) 虚拟仿真转台系统的机械模型和控制率有机结合, 进行联合仿 真来设计和仿真真实转台系统, 如图 & 所示。
三轴转床课程设计说明书
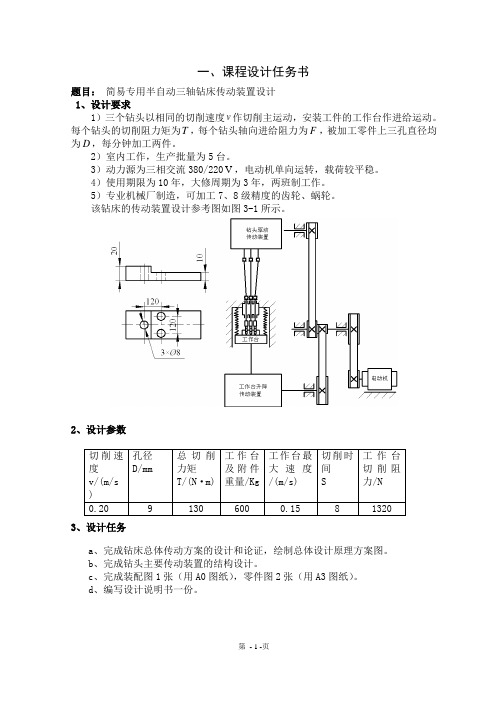
一、课程设计任务书题目:简易专用半自动三轴钻床传动装置设计1、设计要求1)三个钻头以相同的切削速度v作切削主运动,安装工件的工作台作进给运动。
每个钻头的切削阻力矩为T,每个钻头轴向进给阻力为F,被加工零件上三孔直径均为D,每分钟加工两件。
2)室内工作,生产批量为5台。
3)动力源为三相交流380/220V,电动机单向运转,载荷较平稳。
4)使用期限为10年,大修周期为3年,两班制工作。
5)专业机械厂制造,可加工7、8级精度的齿轮、蜗轮。
该钻床的传动装置设计参考图如图3-1所示。
2、设计参数a、完成钻床总体传动方案的设计和论证,绘制总体设计原理方案图。
b、完成钻头主要传动装置的结构设计。
c、完成装配图1张(用A0图纸),零件图2张(用A3图纸)。
d、编写设计说明书一份。
(方案一)(方案二)2、传动装置的选择总传动比为1,要实现传动方向改变90度,因而可以考虑采用涡轮蜗杆加斜齿轮或者是锥齿轮加斜齿轮减速器,但考虑到涡轮蜗杆效率较低,而且安装精度、润滑要求高等因素,因而决定采用后者,即方案二(锥齿轮加斜齿轮减速器)。
设计小结Time flies ,在几周的忙碌中,课程设计结束了。
此次课程设计我收获很多,对机械设计有了新的认识,同时有了规划,主要如下:当前,掌握先进制造技术的高技能人才严重短缺,已经成为制约我国经济和产业发展的最大瓶颈之一。
我们专业的学生尤其是学习技术的,前景一片光明,但是怎么样才能成为一名高技能人才,我们应该怎么做是值得思考的。
1)自我认识是自我发展规划的基础,因此一定要全面、客观、深刻,决不回避自己的缺点和短处。
在自我认识方面,“当局者迷、旁观者清”,我们可以参考家庭、同学、师长和其它专家的意见,力争对自己真正全面的认识。
2)我的优势是我所学的专业——机械制造及其自动化。
我从专业基础课已经学到了很多东西。
海阔凭鱼跃,天高任鸟飞。
我想要学好专业课,首先要学好专业基础课,这一点我做到了,而且很精通。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录摘要 (3)Abstract (4)1 绪论 (6)1.1 引言 (6)1.2 国外研究状况 (6)1.3国内研究状况 (6)2 三轴转台的机械设计 (8)2.1 三轴转台的概述 (8)2.1.1 三轴转台的性能指标 (8)2.1.2三轴转台工作原理概述 (8)2.1.3 伺服驱动电机的选择与计算 (9)2.1.4 直流力矩电机的计算分析 (12)2.1.5 框架的选材 (13)2.2 转台结构的设计 (14)2.2.1 外环装配示意图 (14)2.2.2 中环装配示意图 (15)2.2.3 内环装配示意图 (15)2.2.4 总装配示意图 (16)2.2.5 零件示意图 (16)3 伺服系统的总体设计 (17)3.1伺服系统的组成 (17)3.2 三轴转台的工作原理 (18)3.3 伺服系统硬件的选择 (18)3.3.1 直流电机驱动器的选择 (19)3.3.2 圆光栅编码器增量式YGM506 的选择 (20)3.3.3 稳压器的选择 (20)3.3.4 软件可编程器件的选择 (21)3.3.5 串口卡的选择 (21)3.4 伺服控制系统的硬件接线图 (23)4 三轴转台的运动仿真 (24)4.1 概述 (24)4.1.1 主要优点 (25)4.1.2 研究复杂的实际情况 (25)4.2 三轴转台仿真过程[20] (26)5 结论 (28)6 工作展望 (29)致谢 (30)参考文献 (31)2王伟摘要航空、航天工业发展水平是一个国家科技、经济及国防实力的重要标志。
在航空航天领域中, 惯性导航和制导技术是一项核心技术, 三轴转台是测试惯性元件及半实物仿真的重要非标设备, 其性能的好坏直接影响仿真和测试的可靠性和置信度。
三轴转台是以控制理论、相似理论、系统技术和信息技术为基础,利用计算机和专用物理设备为工具,为惯性导航和制导系统仿真试验提供平台的关键设备【1】。
它能够复现空间质心运动中的转角、角速度、角加速度等物理指标。
由此,可以在地面试验室中真实地模拟导弹、飞行器等在空中的各种飞行姿态,以对敏感元件、惯导系统、执行机构等加以测试。
将昂贵的实物试验转化为试验室中可预测、可重复性研究,为实物试验提供充分的技术指标和试验数据。
本文先建模设计,对转台的机械结构进行设计,并对一些标准件进行了选择,主要轴的设计,对一些装配关系进行了二维或者三维的建模。
其次,对控制系统进行了分析和选择,包括电机的选型,驱动器的选型,编码器的选型,接口扩充的选型,以及相关元件的选型,详细见附图(电控图)。
其中搭建基本的硬件设备,采用软件的控制方法,设置控制系统的各模块选择,实现转台系统的运行功能,完全实现对转台的控制。
(尤其是角速度和角位移的测量是本系统成为高精度转台仿真的关键性选择之一)。
关键词:三轴转台伺服系统建模直流电机3AbstractAviation, aerospace industry development level is a national science and technology, economy and an important symbol of national defense capabilities。
In aerospace field, inertial navigation and guidance technology is a core technology, three axis turntable is testing inertial components and hardware-in-the-loop simulation of important non-standard equipment,who will have a direct impact on the performance of simulation and test reliability and confidence。
The three-axis turntable is control theory, the similarity theory and system technology and information technology as the foundation, based on the computer and special physical equipment for the tool, for inertial navigation and provide the guidance system simulation experiment platform of key equipment。
It can reiteration the corner space centroid movement, angular velocity and Angle acceleration physical parameters and so on。
Thus, can be in the ground in the lab, real simulation of missiles, aircraft in the air each kind of etc, in order to flight attitude is sensitive components, inertial system, executive agencies to test。
The real test will be expensive can predict into laboratory research and repeatability, to provide adequate for physical test the technical indexes and test data。
The real test will be expensive can predict into laboratory research and repeatability, to provide adequate for physical test the technical indexes and test data。
This paper first modeling design, stabilized the mechanical structure design, and the choice of some standard, main shaft design, for some assembly relation of the two-dimensional or three-dimensional modeling。
Secondly, to control system is analyzed and options, including motor selection, drive selection, encoder Selection, interface expansion, and related components selection of selection。
(Detailed control chart is saw)One set of hardware equipments, adopts the basic control method, setting of the software of the control system, realize the turntable each module selection of system operation function, fully realize the control of turntable。
(Especially, the angular velocity and angular displacement measurement is this system become the key choose high one of simulation turntable)4王伟Key words: three-axis turntable Servo system modeling Dc motor51 绪论1.1 引言航空、航天以及航海事业的发展水平反映了一个国家的综合国力,是经济发展水平、科技发展水平及军事实力的综合体现。
这个领域的发展对于政治、国防、经济乃至人民的生活都有着重要的意义。
而惯性导航及制导技术是航空、航天、航海领域的一项核心技术,早期的同步卫星准确定位、航天飞机的成功发射、导弹的精确制导,这都得益于高水平的惯性导航和制导系统。
而惯性导航与制导系统中的核心元件是陀螺仪和加速度计,它们精度的高低将直接影响惯性系统的定位精度。
仿真测试转台是航空航天领域中进行地面半实物实时仿真和测试的一种关键硬件设备,它可在实验室环境内实时地复现飞行器在空中的动力学特性和各种飞行姿态,其性能的优劣直接关系到仿真和测试实验的逼真性和置信度[2],是最典型的测试仿真设备。
1.2 国外研究状况在国际上,由于惯性制导技术受到世界上技术先进国家和发展中国家的普遍重视,所以美国、俄罗斯、英国、法国、瑞士、中国、印度等国都投入了大量的资金和人力从事转台的研制。
其中,美国的转台研究一直处于世界领先水平,其次,德国、英国、法国和瑞士等国研制的转台也具有一定代表性,性能和质量仅次于美国。
世界上的第一台转台是1945年由美国麻省理工学院仪表实验室研制成功的,定为A型转台,采用普通滚珠轴承,用交流力矩电机驱动,角位置测量元件采用滚珠与微动开关,由于采用的元件精度比较低,加上没有经验可以借鉴,该转台存在许多缺点,精度也只能达到角分级,实际上没有投入使用。
随后,美国的欧思一伊利诺斯公司的菲克(Fecker)系统分公司又研制出了T-800型伺服转台,它标志着美国的转台设计己经达到了一个新水平。
六十年代开始对转台的重要部件如轴承、驱动马达和监测元件进行了系统的改进,研制成功了专用于转台的空气轴承和液压轴承,大调速比、高精度的液压马达和高分辨率的检测元件,把转台的技术水平推向了一个新台阶。
同时诞生了一些专业生产转台的公司,如美国的CGC公司、Carco公司、德国的MBB公司等。
1.3国内研究状况我国的转台研制虽然比发达国家起步晚,但这些年来也取得了一定的成就,特别6王伟7是近几年来,转台的研制得到了很大的发展。
目前,国内也有很多研究机构和高校在从事转台的研究与开发,例如哈尔滨工业大学、中航303所、中船6354所、南京航空航天大学等。