4.3节拉氏变换的基本性质
数学物理方法 拉氏变换
1 c j st (1)利用公式 f (t ) F (s)e ds c j 2 πj
(2)对简单形式的F(s)可以查拉氏变换表得原函数 (3)把F(s)分解为简单项的组合
F ( s ) F1 ( s ) F2 ( s ) Fn ( s )
f (t ) f1 (t ) f 2 (t ) f n (t )
K2 Kn ( s p1 ) F (s) K1 ( s p1 ) s p s p 2 n
令 s = p1 方法2
求极限的方法
N (s)(s pi ) K i lim s pi D(s)
返 回 上 页 下 页
N (s)(s pi ) K i lim s pi D(s)
2. 拉氏变换的定义
定义 [ 0 , ∞)区间函数 f(t)的拉普拉斯变换式:
简写 F (s) L f (t ) , f (t ) L F (s)
-1
F ( s ) f (t )e st dt 0 1 c j st F ( s ) e d s f (t ) c j 2 πj
s 1
3
d K 21 [( s 1) 2 F ( s )] s 1 d [ s 4 ] 4 s 1 ds ds s
f (t ) 4 4e 3te
t
t
返 回
上 页
下 页
小结 由F(s)求f(t) 的步骤: n =m 时将F(s)化成真分式和多项式之和 N 0 (s) F (s) A D(s)
(2) f (t ) δ ( t )的象函数
1 L[ (t )] s d (t ) 1 L (t ) L[ ] s 0 1 dt s 2 d f ( t ) ' 推广:L[ ] s[ sF ( s) f (0 )] f (0 ) 2 dt 2 ' s F ( s) sf (0 ) f (0 )
拉氏变换详细解读
s+a
(二)、拉氏变换的主要定理 )、拉氏变换的主要定理 1.线性定理
L[ f1(t ) + f2 (t )] = L[ f1(t )] + L[ f2 (t )] = F1(s) + F2 (s)
L[kf (t )] = kL[ f (t )] = kF(s)
2.微分定理
df (t ) L = sF(s) − f (0+ ) dt
n −at
s 2 2 s +ω n! sn+1 n!
( s + a)
1
n+1
( s + a) ( s + b)
1 s ( s + a) ( s + b)
( s + a) ( s + b)
s
序号
−at
f(t)
F(s)
13
e sinωt e cosωt
− at
( s + a ) + ω2
2
ω
14
s + a ) + ω2 (
) 式中 f (−1) (0+ ) 为 ∫ f (t dt 在t时间坐标轴的右端 趋于零时的f 的值,相当于初始条件。 趋于零时的f(t)的值,相当于初始条件。
f (t )(dt )2 = 1 F(s) + 1 f (−1) (0+ ) + 1 f (−2) (0+ ) L ∫∫ s2 s2 s
2. 部分分式展开法 (利用逆变化的线性原理)
控制工程中,象函数F(s)通常可以表示有理分式形式 控制工程中,
B(s) bm sm + bm−1sm−1 + bm−2 sm−2 +⋅⋅⋅⋅⋅⋅ +b1s + b0 F(s) = = A(s) an sn + an−1sn−1 + an−2 sn−2 +⋅⋅⋅⋅⋅⋅ +a1s + a0
拉氏变换的基本性质.
• 主要内容
•线性(叠加) •原函数的微分与积分 •延时、 S域平移 •尺度变换 •初值、终值、卷积定理
• 重点:拉氏变换的基本性质 • 难点:基本性质公式的推导
一、线性(叠加)
若 f1(t) F1(s) f2(t) F2(s)
则
C1 f1 (t) C2 f2 (t) C1F1 (s) C2F2 (s) 其中:C1,C2为任意常
0
1 t f t est d t F s
s0
s
电容元件的s域模型
iC t C vC t
1 vC (t) C
t
ic ( )d
设LiC (t) IC (s), LvC (t) VC (s)
VC
(s)
1 C
IC (s) s
iC (1) (0 s
)
1 sC
IC (s)
1 s
卷积
定理
f1(t). f2 (t)
F1(s).F2 (s)
1
2j
F1(s) *
F2
(s)
思考题
• 1. 拉氏变换的基本性质及其变换公式?
数
例:
f (t) cos(0t)
1
e e j0t
j0t
F s f (t)es tdt
2
0
e-at 1
sa
F(s)
1 2
s
1 j0
s
1 j0
s2
s 02
f(t)=sin(ot
)
1 2j
e e j0t
j0t
F(s)
1 2j
s
1 j0
s1 j0s20 02二.原函数微分
拉氏变换
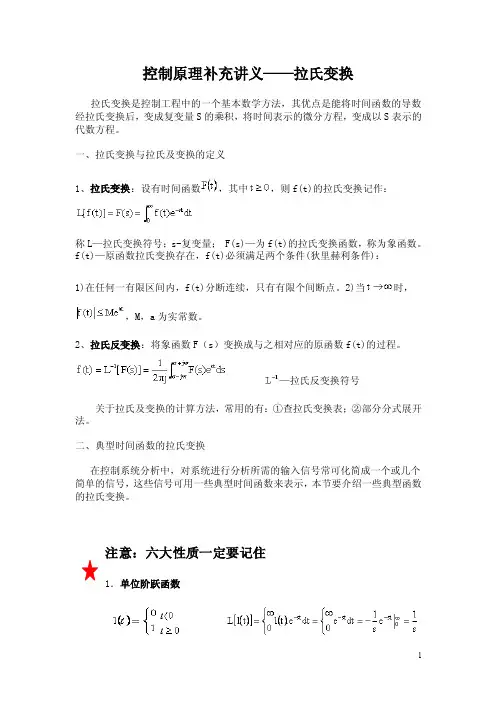
控制原理补充讲义——拉氏变换拉氏变换是控制工程中的一个基本数学方法,其优点是能将时间函数的导数经拉氏变换后,变成复变量S的乘积,将时间表示的微分方程,变成以S表示的代数方程。
一、拉氏变换与拉氏及变换的定义1、拉氏变换:设有时间函数,其中,则f(t)的拉氏变换记作:称L—拉氏变换符号;s-复变量; F(s)—为f(t)的拉氏变换函数,称为象函数。
f(t)—原函数拉氏变换存在,f(t)必须满足两个条件(狄里赫利条件):1)在任何一有限区间内,f(t)分断连续,只有有限个间断点。
2)当时,,M,a为实常数。
2、拉氏反变换:将象函数F(s)变换成与之相对应的原函数f(t)的过程。
—拉氏反变换符号关于拉氏及变换的计算方法,常用的有:①查拉氏变换表;②部分分式展开法。
二、典型时间函数的拉氏变换在控制系统分析中,对系统进行分析所需的输入信号常可化简成一个或几个简单的信号,这些信号可用一些典型时间函数来表示,本节要介绍一些典型函数的拉氏变换。
注意:六大性质一定要记住1.单位阶跃函数2.单位脉冲函数3.单位斜坡函数4.指数函数5.正弦函数sinwt由欧拉公式:所以,6.余弦函数coswt其它的可见下表:拉氏变换对照表 序号 F(s) f(t) 序号 F(s) f(t)11 1121(t) 123t13414511+Ts Tte T-1 156)(1a s s +ate --1167)1(1+Ts sTt e--117)1sin(122ϕξωξωξω----t e n t nn8189191020三、拉氏变换的性质1、线性性质若有常数k1,k2,函数f1(t),f2(t),且f1(t),f2(t)的拉氏变换为F1(s),F2(s),则有:,此式可由定义证明。
2、位移定理(1)实数域的位移定理若f(t)的拉氏变换为F(s),则对任一正实数a有,其中,当t<0时,f(t)=0,f(t-a)表示f(t)延迟时间a.证明:,令t-a=τ,则有上式=例:求其拉氏变换(2)复数域的位移定理若f(t)的拉氏变换为F(s),对于任一常数a,有证:例:求的拉氏变换3、微分定理设f(t)的拉氏变换为F(s),则其中f(0+)是由正向使的f(t)值。
(完整版)最全拉氏变换计算公式
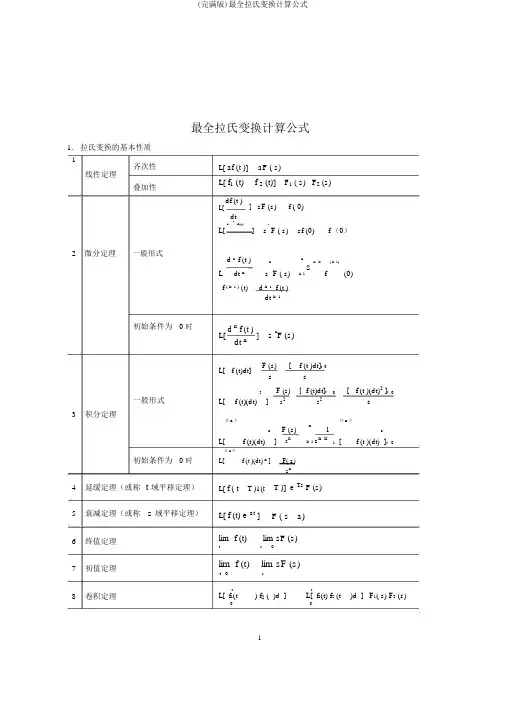
最全拉氏变换计算公式1.拉氏变换的基本性质1齐次性线性定理叠加性2微分定理一般形式初始条件为0 时一般形式3积分定理初始条件为0 时4延缓定理(或称 t 域平移定理)5衰减定理(或称 s 域平移定理)6终值定理7初值定理8卷积定理L[ af (t )] aF ( s)L[ f1 (t) f 2 (t)] F1 ( s) F2 (s)df (t )] sF (s) f ( 0)L[dt2d f (t ) 2L[] s F ( s) sf (0) f (0)d n f (t )nnn k ( k 1)k 1sL dt n s F ( s) f (0)f ( k 1 ) (t) d k 1 f (t )dt k 1L[d n f (t )] s n F (s)dt nL[ f (t)dt]F (s) [ f (t )dt]t 0s sL[ f (t)(dt)2]F (s) [ f (t)dt]t 0 [ f (t )(dt)2 ]t 0s2 s2 s共 n个n共 n个nF (s) 1 nL[ f (t)(dt) ] [ f (t )(dt) ]t 0s n k 1 s n k 1共n个L[ f (t )(dt) n ] F( s)s nL[ f ( t T )1(t T )] e Ts F (s)L[ f (t) e at ] F ( s a)lim f (t) lim sF (s)t s 0lim f (t) lim sF (s)t 0 st) f2 ( )d ]t)d ] F1( s) F2 (s) L[ f1(t L[ f1(t) f2 (t0 012.常用函数的拉氏变换和序号拉氏变换E(s) 1 112 1 e Ts13s4 1 s25 1 s361 s n 17 1s a8 1 2( s a)9 as(s a)10 b a(s a)(s b) 11 s 2 212ss2 213( s2 2a)14 s a 2 2(s a)1 z变换表时间函数e(t)δ(t)T (t )(t nT )n 01(t )tt 22t nn!e atte at1 e ate at e btsin tcos te at sin te at cos tZ 变换 E(z)1zz 1zz 1Tz(z 1) 2T 2 z( z 1)2(z 1)3lim(1)n nzn ( aT)a 0 n! a z ezaTz eTze aT( z e aT ) 2(1 e aT )z( z 1)(z e aT )z zz e aT z e bTzsin Tz2 2z cos T 1z2z( z cos T )2 zcos T 1ze aT sin Tz2 2ze aT cos T e 2 aTz2 ze aT cos Tz2 2ze aT cos T e 2aTz15 s (1/ T ) ln a a t / T z a23.用表法行拉氏反用表法行拉氏反的关在于将式行部分分式张开,尔后逐表行反。
拉氏变换.doc
控制原理补充讲义——拉氏变换拉氏变换是控制工程中的一个基本数学方法,其优点是能将时间函数的导数经拉氏变换后,变成复变量S的乘积,将时间表示的微分方程,变成以S表示的代数方程。
一、拉氏变换与拉氏及变换的定义1、拉氏变换:设有时间函数,其中,则f(t)的拉氏变换记作:称L—拉氏变换符号;s-复变量; F(s)—为f(t)的拉氏变换函数,称为象函数。
f(t)—原函数拉氏变换存在,f(t)必须满足两个条件(狄里赫利条件):1)在任何一有限区间内,f(t)分断连续,只有有限个间断点。
2)当时,,M,a为实常数。
2、拉氏反变换:将象函数F(s)变换成与之相对应的原函数f(t)的过程。
—拉氏反变换符号关于拉氏及变换的计算方法,常用的有:①查拉氏变换表;②部分分式展开法。
二、典型时间函数的拉氏变换在控制系统分析中,对系统进行分析所需的输入信号常可化简成一个或几个简单的信号,这些信号可用一些典型时间函数来表示,本节要介绍一些典型函数的拉氏变换。
注意:六大性质一定要记住1.单位阶跃函数2.单位脉冲函数3.单位斜坡函数4.指数函数5.正弦函数sinwt由欧拉公式:所以,6.余弦函数coswt其它的可见下表:拉氏变换对照表)1sin(122ϕξωξωξω----t e n t nn三、拉氏变换的性质1、线性性质若有常数k1,k2,函数f1(t),f2(t),且f1(t),f2(t)的拉氏变换为F1(s),F2(s), 则有:,此式可由定义证明。
2、位移定理(1)实数域的位移定理若f(t)的拉氏变换为F(s),则对任一正实数a有,其中,当t<0时,f(t)=0,f(t-a)表示f(t)延迟时间a.证明:,令t-a=τ,则有上式=例:求其拉氏变换(2)复数域的位移定理若f(t)的拉氏变换为F(s),对于任一常数a,有证:例:求的拉氏变换3、微分定理设f(t)的拉氏变换为F(s),则其中f(0+)是由正向使的f(t)值。
拉氏变换xin
图象沿t 轴向右平移距离而得。 这个性质表明,时间函数延迟 τ 的拉氏变换等于它的
象函数乘以指数因子 e s 。
28
0, t τ 的拉氏变换。 例 求函数 u (t τ ) 1, t τ
解 由于
f (t ) Mect ,0 t
成立(满足此条件的函数,称它的增大是指数级 的,c为它的增长指数)。
7
则 f (t ) 的拉氏变换
F ( s)
0
f (t ) e st dt
在半平面 Re(s) c上一定存在,右端的积分在 Re(s) c1 c 上绝对收敛而且一致收敛,并且在
0
sin t 1 dt d s arctan s 0 s2 1 t
0
2
22
d.位移性质 若 L f (t ) F (s) ,则有
L e at f (t ) F (s a)
证
(Re(s a) c)
0
L e f (t ) 其中 Nhomakorabea 0
f (t ) dt F ( s )d s 0 t
F (s) L f (t )
这一公式,常用来计算某些积分。
21
例 求积分
0
sin t dt t
1 L sin t 2 s 1
解 因为
且
所以
0
f (t ) dt F ( s )d s 0 t
1 sinh t L L sinh t ds 2 ds s s s 1 t
1 s 1 ln 2 s 1
拉氏变换
3、积分定理
f(t)先积分再取拉氏变换,由积分定理有:
F ( s ) f ( 1 ) ( 0 ) L [ f ( t )dt ] s s
1 f 式中, 0 f t dt在0时刻的初始值。
( 1 ) ( 2 ) F ( s ) f ( 0 ) f (0 ) 2 L [ f ( t )( dt ) ] 2 2 s s s
X ( s)
0 例1、求指数函数 f ( t ) at e
(t 0 ) (t 0 )
的拉氏变换 F( s ) 。
变量置换法
解:由拉氏变换的定义式有:
F ( s ) f ( t )e
0
st
dt e e
0
at st
dt e
0
( a s )t
L [ ( t )] 1
常用函数的Laplace变换见附表-1。
三、拉氏变换的基本定理
1、性线定理
(1)比例性
L[ af ( t )] aF( s )
(2)叠加性
L[ f1 ( t ) f 2 ( t )] F1 ( s ) F2 ( s )
2、微分定理
原函数的导数的拉氏变换为: 一阶导:
例(1)f(t)的拉氏变换为 F ( s ) ,应用终值定理求f(t)的 s( s 5 ) 终值。 1 (2)已知F ( s ) ( s 1 ) ,应用初值定理求 f ( 0 )和f ( 0 ) 的值。
2
5
解:(1)由终值定理有:
lim f (t ) lim s F ( s) lim s
于是:
st st st 0 ( te )dt 0 e dt 0 ste dt
拉氏变换详细解读
φ = arctan
1− 1 1−ζ
2
ζ
e−ζωnt sin ωn 1 − ζ 2 t + φ 1−ζ 2
(
18
φ = arctan
2 ωn 2 s ( s2 + 2ζωn s + ωn )
ζ
根据表格直接写出结果
L [δ (t )] = 1, L e
− at
1 L [1(t )] = , s
ω s L [sin ωt ] = 2 , L [ cos ωt ] = 2 2 2 s +ω s +ω
e sinωt →
−at
1 = s+a,
1 L [t ] = 2 s 1 at L e = s−a
s + a ) + ω2 (
2
ω
e cosωt →
−at
s + a ) + ω2 (
3
2
5s3Y (s) + 6s2Y (s) + sY (s) + 2Y (s) = 4sX(s) + X(s) (5s3 + 6s2 + s + 2)Y (s) = (4s + 1) X(s)
Y (s) 4s + 1 = 3 X (s) 5s + 6s2 + s + 2
3.积分定理 积分定理
f (t )dt = 1 F(s) + 1 f (−1) (0+ ) L ∫ s s
2. 部分分式展开法 (利用逆变化的线性原理)
控制工程中,象函数F(s)通常可以表示有理分式形式 控制工程中,
B(s) bm sm + bm−1sm−1 + bm−2 sm−2 +⋅⋅⋅⋅⋅⋅ +b1s + b0 F(s) = = A(s) an sn + an−1sn−1 + an−2 sn−2 +⋅⋅⋅⋅⋅⋅ +a1s + a0
4-3拉氏变换法分析电路,系统函数
解:
E2
i L (t )
E − 1 sR1
I L 0 ( s)
sL
I L ( s)
R0
R2
E2 sR2
+ +
+ E1 -
L
R0
E1 E2 + sR1 sR2 1 I L0 ( s ) = ⋅ 1 1 1 sL + + sL R0 R2 1 E1 E2 ( + ) s R1 R2 = R0 + R2 sL +1 R0 R2
VL ( s) iL (0− ) + 并联 I L ( s) = sL s
SL
I L (S ) SL
LiL (0 − ) + -
I L (S )串 +V NhomakorabeaL (S )
并 - +
iL (0 − ) S
V L (S )
-
哈尔滨工业大学自动化测试与控制系
信号与系统— 信号与系统—signals and systems
1 2 s vC ( s ) = = E( − ) 1 + RCs s s + 1/ RC
− RCE
⇒ vc (t ) = E − 2 Ee
−
t RC
, (t ≥ 0)
哈尔滨工业大学自动化测试与控制系
信号与系统— 信号与系统—signals and systems
②
dvR (t ) de(t ) 1 1 ∫ vR (t )dt + vR (t ) = e(t ) ⇒ RC vR (t ) + dt = dt RC
Li ′(0+ ) = vL (0+ ) = E ⇒ i ′(0+ ) = 2
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在原点处不
包含冲激.于是
df st lim e dt 0 即lim sF ( s) f (0 ) 0 s 0 dt s
f (0 ) f (0 ) f (0 ) lim sF ( s)
s
LT
LT
snT
利用时移特性
F1 ( s)
利用无穷递减等比 a 级数求和 s 1 - q
1
f (t nT ) F1 ( s) e SnT
n 0 n 0
F1 ( s) 1 e ST
例1:求全波整流周期信号的拉氏变换(习题4-20)
f (t )
1
0
f 0 (t )
e
st 0
F ( s)
f (t )e at
F ( s a)
拉氏变换的基本性质(2) 1 s F 尺度变换 f (at) a a
初值定理
t 0
lim f (t ) f (0 ) lim SF ( s)
s
终值 定理
lim f (t ) f () lim SF ( s )
f (t ) f (t ) se st dt 0 0
lime st f (t ) f (o ) sF ( s )
t
f (t )是指数阶函数 lim e st f (t ) 0
t
df (t ) L[ ] sF ( s ) f (0 )可以推广到高阶 dt (见p194,4-29和4-30式)
T sin(t ) 0 t 2
T
2
0 t为其它值时
T 解 : f (t ) sin(t ) [u (t ) u (t )] 2
T =sin( t) u(t)-sin( t) u(t- ) 2
利用 sin( B) sin cos cos sin 2 和T T sin (t ) sin t 2 T T f (t ) sin tu (t ) sin( (t )u (t ) 2 2 T T L[ f (t )] L[sin tu (t ) sin (t )u (t )] 2 2 T s 2 (1 e 2 ) 2 s
2.时域积分特性 若 f (t ) F (s) 则
F ( s) F ( s) f ( )d 拉 : f ( )d 且 f ( )d s s s 0
t t 0
付 : f (t ) F ( j ), 则
求:
t
1 f ( )d F ( j ) F (0) ( ) j
0 n 0
St
dt
f (nT )e
n 0
nsT
抽样信号的拉氏变换可表示为S域级数
(二). 时域微ห้องสมุดไป่ตู้积分特性
df 1.若f (t ) F ( s ),则 sF ( s ) f (0 ) Re s 0 dt dn f n n 1 n2 ' n 1 和 n s F ( s ) s f (0 ) s f (0 ) f (0 ) dt s n F ( s ) s n r 1 f ( r ) (0 )
为什么微分的变换式里与f (0 )有关?
虽然 : L[ f (t )] L[ f (t )u (t )] d d 但L[ [ f (t )u (t )] 不一定和L[ f (t )]相等。 dt dt
设:f1 (t ) e u(t )
f1 (t )
at
f 2 (t )
1...t 0
r 0 n 1
证明:
L[ f ' (t )] 令:u e st
0
df (t ) st e dt e st df (t ) dt 0 dv df (t ) v f (t ) du se st dt
L[ f ' (t )] e st
t s 0
f1 (t ) * f 2 (t )
卷积 定理
F1 (s).F2 (s)
1 F1 ( s) * F2 ( s) 2j
f1 (t ). f 2 (t )
P200.表4.2 拉氏变换的性质
4.时域平移 f (t ) f (t t 0 ) 2.对t微分 3.对t积分 重点讨论 7.初值 t 0 8.终值 t0 (一).时域平移特性和应用 1.时移性 设 f (t ) F (s)
f 2 (t )
e ...t 0
at
df1 df1 a at (t ) ae u (t ) L[ ] 1 sF1 ( s) dt dt sa
df 2 at 2 (t ) ae u (t ) dt df 2 a s L[ ] 2 1 sF2 (s) f (0 ) dt sa sa
n 0
L[ T (t )]
0
(t nt )e
n 0
St
dt
1 ST 1 e f s (t ) f (t ) T (t ) [ f (nT ) (t nT )]
n0
L[ f S (t )] F (nT ) (t nT )e
df 3 f (t ) 2 f ( ) d u (t ) dt f (0 ) 2,
0
t
f ( ) d 0
解:
0
F ( s ) sF ( s ) f (0 ) 3F ( s) 2[ s s
f ( )d
1 ] s
2s 1 1 3 F ( s) 2 s 3s 2 s 1 s 2 t 2 t f (t ) [e 3e ]u (t )
*几点说明 a.要注意初值f(t) 为t= 0 时刻的值,而不是 f(t)在t= 0 时刻的值,无论拉氏变换F(s)是
采用 0 系统还是采用 0 系统,所求得的初值 总是 f (0 ) b.若F(s)是有理代数式,则F(s)必须是真分式 即F(s)分子的阶次应低于分母的阶次,若不是 真分式,则应用长除法,使F(s)中出现真分式,而 初值 f (0 )等于真分式 F 0(s) 逆变换 f 0(t ). c.物理解释: s ( j ) 相当于接入信 号的突变高频分量.所以可以给出相应的初值
lim [ f (0 ) f (0 )] (t )e dt 0 f (0 ) f (0 )
st s 0
即 lim sF (s) f (0 ) f (0 ) f (0 )
s
f (0 ) lim sF (s)
s
*几点说明 a.如果所处理的函数为有始函数 即 f (t ) 0 t 0 则f (0 ), f ' (0 ), f ( n1) (0 ) 都为零.那么
df d n f (t ) n L[ ] sF ( s) L[ ] s F ( s) n dt dt
但若f(t)在t=0有跃变,应嵌入一个冲激.
设f (t ) sin t
sin(0t ) u(t )
t
0
0 t0
sin[0 (t t0 )] u(t )
t
sin(0t ) u(t t0 )
t
0 t0
0
sin[0 (t t0 )] u(t t0 )
t
t0
3.时移特性的应用p250.4-2 (1)
1. f (t )
这里还要说明一个基本问题,即不要把单边拉氏 变换理解为只能用于因果信号. 如在利用微分和 积分定理求非因果信号的单边拉氏变换时,这样 理解,可能会得出错误的结果,如
f 2( t )
t 0
1
若误认为 2 ( t ) f
t 0
0
结果就错了 .
c.为了不使t=0点的冲激丢失,在单边拉氏变 换中一般采用 0 系统.而且采用 0 系统, 对解决实际问题较为方便.
T 2
T
t
(1 e ) 2 2 S
T 2
1 1 e
S T 2
1 0
t
T 2
2 T
2 T sin( t ) [u (t ) u (t )] T 2
LT
信号加窗 第一周期
(1 e ) 2 2 S
T 2
抽样信号的拉氏变换
抽样序列
T (t ) (t nT )
T
*单边周期函数的拉氏变换定理:若接通的 周期函数f(t)的第一个周期的拉氏变换为F1 ( s) 则函数f(t)的拉氏变换为(习题4-19)
F1 ( s ) F (s) sT 0 1 e
例:周期信号的拉氏变换
f1 (t ) F1 ( s)
LT
第一周期的拉氏变换
f1 (t nT ) e
初始条件自动包含在变换式中,一步 求出系统的全响应。
三.初值和终值定理 1.初值定理 df 若f(t) 及其导数 dt 可以进行拉氏变换 且 f (t ) F (s) 则 lim f (t ) f (0 ) lim sF ( s )
t 0 s
证明:利用时域微分特性 df df st L[ ] e dt sF ( s ) f (0 ) 0 dt dt
第4.3节 拉氏变换的基本性质(1)
线性 微分 积分 时移 频移
k f (t)
i 1 i i