模糊PID 控制水位系统
PID控制在供水控制系统中的应用
伴随着智能化技术的持续性发展,在目前多个行业中智能化控制技术均有比较成熟的研究与应用,其中在水利水电、石油化工以及交通运输领域中均有着智能化的应用案例。
新的形势下所提出的供水方案需减少供水成本,建立智能且高效的供水系统具有重要的社会意义和经济意义。
采用先进的智能控制策略,实现水资源的合理利用,成为迫切需要解决的问题,并具有重要的经济和社会意义。
一、供水系统的组成供水系统由模糊PID控制器、S7-300PLC控制器、压力及水位检测传感器、变频器、电动机、水泵、储水池、报警器等组成。
系统的具体工作过程为:针对水压和水位控制,传感器不停地采集管网中的数值,并将该值转换为电信号,并将此电信号传输给PLC,PLC将此水压水位值与给定值进行比较,再根据模糊PID控制算法计算岀相应的控制量来实时控制变频器的输岀频率,用于控制电机转速,从而使系统水压水位恒定不变,如发生偏差,立即报警。
二、PID控制系统设计水泵有主泵、辅泵和故障备用泵三种类型,并且三个泵之间可以互相交换。
通过变频器控制的水泵为主泵,通过工频电压控制的为辅泵,当故障发生时采用的是故障备用泵,三个泵的工作方式是先开先停循环工作,每次增加一个水泵投入运行工作,就把之前工作的变频泵软停止同时将其切换为工频运行,新泵继续采用变频器软起动变频运行。
QA是低压断路器,KM1、KM2、KM3、KM4、KM5、KM6和KM7是接触器,FR1、FR2和FR3是热继电器。
如果要供水,首先由PLC发岀指令,QA、KM1和KM2闭合,导致电动机M1开始变频软启动,当频率从0Hz上升到工频50Hz时,电动机M1增大转速,如果水压增到给定值,M1减速运行,如果水压还低于给定值,KM2断开,KM3闭合,M1开始进入工频运行,同时KM4闭合,电动机M2进入变频软启动,当频率从0Hz增大到工频50Hz时,电动机M2转速上升,如果水压高于给定值,M2减速运行,如果水压低于给定值或有故障发生,KM4打开,KM5闭合,M2工频运行,启动故障泵M3。
新型模糊PID复合控制在锅炉汽包水位控制中的应用

( a zo e ohm cl o eeo eh o g , a zo a s 3 0 0 C ia L nh uP t ce i lg Tcn l y L nh uG nu7 0 6 , hn ) r aC l f o
Ab t a t :Dr sr c um tr lv li n i ora tide o e u e t aey a d sa e o r to o ol r. A e d sg eh d o u z nd PI wae e e sa mp tn n x t ns r he s f t n tbl pea in fr b ie s n w e i n m t o ffz y a D
调 。为此 , 制系统引入模糊 控制 , 控 在常规 PD控 制器 初值 的基 I 础上通过对其参数进行在线修改 , 以满足不同误差和误差变化率 对控制参数的不 同要求 , 可使被控对象有 良好的动 、 静态性能 。
模 糊 PD控 制 结 构 是 一 类 被 广 泛 应 用 的 PD控 制 器 , 控 制 I I 该
明显 改 进 。
关 键词 :汽 包 水 位
模 糊 PD I
[ 中图分类号]T 23 [ P7 文献标识码 ]A [ 文章编号] 10 —8 6 2 1 ) 1 0 50 0 03 8 (0 1 0 - 3 -3 0
Ap l a i n o w u z - Hy r n r l n Dr m a e e e n r l fBo lr pi t fNe F z Байду номын сангаас PI c o D b i Co t u W t rL v l d o i Co to i s o e
过低会造成锅炉水循环 的破坏 , 使水 冷壁 管超温 过热 ; 重缺水 严 时 , 易使 水全部汽化烧坏锅 炉甚 至爆炸 , 容 造成 更严 重 的设 备损
基于模糊PID控制的锅炉汽包水位控制系统的研究

摘要本文首先分析了影响汽包水位的各种干扰因素,并对汽包水位的动、静态特性进行分析。
介绍了传统的PID控制方式,由于锅炉汽包水位控制系统的调节器的输入端常加有三个不确定的输入量,极易引起水位控制偏差。
所以本文提出了两种消除水位偏差的方法:辅助信号自消方法和辅助信号对消方法。
采用辅助信号蒸汽流量和给水流量对消方法消除水位偏差,根据锅炉汽包水位控制实际要求,采用模糊PID控制,用MATLAB中的SIMULINK仿真工具箱设计了二输入单输出模糊控制器对锅炉汽包水位进行在给定值下仿真。
并用常规PID和模糊PIDF方法去控制汽包液位,对比两种控制策略下的防真图像,仿真图像表明后者的抗干扰能力和鲁棒性更好,可以保证水位的稳定,并且能有效解决用常规PID无法解决的“虚假液位”问题。
最后简单介绍几种由汽包水位测量方法及测量误差带来影响、及消除方法,通过现场实例解决了汽包水位测量不准的问题,减少了由于水位测量误差给汽包水位带来的不利影响。
关键词:汽包水位、虚假液位、PID控制、模糊PID控制、水位测量误差AbstractThis article first analyzes the impact of the drum water level of the various interfering factors,and drum water level of the dynamic and static analysis features.Introduced the traditional PID control,due to the boiler drum water level control system input regulator has three regular increase of the input uncertainty is very easy to control the deviation caused by the water level.Therefore,this paper two methods to eliminate the water level deviation: auxiliary signal from the elimination method and auxiliary signal cancellation method. The use of auxiliary steam flow signal and water flow rate on the elimination method to eliminate the water level deviation of the boiler drum water level control in accordance with practical requirements, the use of fuzzy PID control, the use of MATLAB simulation toolbox SIMULINK design two-input single-output fuzzy controller on the boiler drum the waterlevel to the next value in a given simulation. Using conventional PID and fuzzy control approach to PIDF drum level,compared to two control strategies of anti-real images,simulation images show that the latter's anti-interference ability and robustness better, can guarantee the stability of the water level, and can effectively solution can not be resolved with conventional PID "false level" problem.Finally, a brief introduction by the drum water level of several measurement methods and about the impact of measurement error, and the elimination method, through on-site example of the drum water level measurement solution to the problem of not allowed to reduce measurement error due to the water level to the negative drum water level impact.Key words: Drum water level、PID control、fuzzy PID control,、water level measurement error第一章绪论1.1 课题背景与意义目前,我国现有工业锅炉几十万台,各种工业炉窑十万余台。
模糊PID双模控制器在水位控制中的应用

第29卷第5期Vbl.29No。
5唐山师范学院学报JoMmnl町‰蛩h∽Rnch日sCdtege2007年9月s∞.2007模糊一PID双模控糊器在水位控制中的应用马军爽,郭耀华,王维(唐山学院.河北唐山063000)摘要:针对传统的锅炉的水位冲量控制方法的不足,馈,比例。
PI、PlD控制思想,构成新的模糊复合控制器.控制效果得到明显改善。
关键词:锅炉水位;三冲量:模糊一PID双摸控制中图分类号:TPl83文献标识码:Al引言锅炉的水位控制是下业锅炉控制过程中的一个重璺环节;汽包水位足影响锅炉安仝运{r的匪耍参数,水位的过高或过低都n】能造成瞢太事故。
传统水位撺制常采用冲量控制方法,该方法具有直观、实现简甲和鲁棒性好等优点。
但是,锅炉是一个非线性、多变量、太滞后及强干扰的复杂渊节对象,且存在多种变量的耦台作用,很难建立准确的数学模型,而且对于汽包水位控制中产生的虚假水位现象,传统控制效果并不太理想。
奉义捉Ⅲ一种模糊.PID双模控制,即在模糊柠制中加入前馈、比伽I、PI、PID控制思想。
构成新的模糊复合控制器,即Fuzzy.PlD双模控制,控制系统总的挡制作用是模糊控制和PID控制作用之和,该方法给提出一种模糊.PID双模控制,印在模糊控制中掺入前这种方法在实际应用中大大提高了水位控制的性能,文章编号:1009-9115(2007)05-0104—03结合了传统控制和模糊控制的优点,可使控制效果得到明显改善。
2模糊一PID双模控制系统的设计在模糊{牵制中掺入前馈、比例、PI、PlD控制思想,构成新的模糊复台控制器,PID调解器的积分调节作用从理论J:可以使系统的稳态误差}卒制为O,有着很好的消除稳态误差的作用。
当误差“某一阀值以外时,采用模糊控制.以获得良好的瞬态性能;当误差落到阀值以内的范嘲时,则采用PID控制,以获得良好的稳奋性能。
控制系统总的控制作用是模糊控制器的控制作用和PID调解器控龟4作用之和。
模糊PID在水位控制系统中的应用

模糊PID在水位控制系统中的应用为了解决造纸行业对恒定水位的控制问题,设计并应用了水位恒定控制系统中的模糊PID控制器。
详细论述了模糊PID算法的设计过程,通过实验验证了此方法的可行性。
实现了水位控制系统的PID参数的在线调整,达到了对水位的有效控制的目的。
引言水位控制系统在造纸行业得到广泛应用,如果液位控制不好,液位高了或低了,会影响纸张的质量。
本文将模糊控制和PID控制结合起来,实现PID参数的在线调整,可以有效地解决系统的非线性和不确定性,同时随时根据系统的输入与反馈的偏差及偏差率来调节水位,实现水位的恒定。
实验结果表明,这样既能防止超调又能提高响应速度,明显地改善了系统的动态和静态性能,在水的压力及负载变化的情况下也能保持水位的恒定。
1 水位控制系统本系统的控制对象如图1所示:假若液罐I和液罐Ⅱ里面均是水,由液罐I的水通过进水管的水泵将水输送到液罐Ⅱ。
水位的控制过程如下:水位变送器检测到的水位值通过PLC 送到控制器中,该值与控制器的设定值进行比较,如果检测到的值小于设定值,那么控制器将输出调节信号,经过PLC、手操器,最终将信号送至出水管的电动调节阀上,此信号将阀关小。
如果检测到的值大于设定值,那么阀将开大。
如果检测值与设定值正好相等时,这时的出水量应与水泵的进水量相等,保持动态平衡犯。
2 水位的模糊PID控制2.1模糊PID的构成常规的PID控制虽有着原理简单、使用方便等优点但却不具备在线调整参数P、I、D 的功能,使其不能满足系统在不同条件下对PID参数自调整的要求,模糊控制器是一种近年来发展起来的新型控制器,其优点是不要求掌握被控对象的精确数学模型,而根据人工规则组织决策表,且由该表决定控制量的大小。
模糊控制器代替了传统的控制器,它是模糊控制系统的核心部分。
由输入量模糊化、模糊控制规则、模糊决策等几部分组成,如图2所示。
点击图片查看大图图1 水位控制结构框图点击图片查看大图图2 模糊控制系统原理框图2.2模糊-PID控制原理模糊一PID控制器是以误差e和误差变化率ec作为输入,根据不同的偏差和偏差率对PID参数进行在线调整,以满足不同时刻对控制参数的不同要求,而使被控对象有良好的动、静态性能,如图3所示。
蒸汽发生器水位的模糊—PID复合控制

蒸汽发生器水位的模糊—PID复合控制摘要笔者在对蒸汽发生设备的水位进行调控的时候使用的是模糊自适应PID的方式,通过这种方式来对水位控制设备与舰船的运动性能进行有效的调节;在具体的控制过程中将使用集总参数化模型,设计一种基于模糊控制原理的蒸汽发生器的模糊自适应PID水位调控设备,同时笔者又通过实际试验来对这种设备的作用进行验证。
关键词蒸汽发生器;水位;控制;PID0 引言蒸汽发生器作为一个大型的设备,具有非线性、时变性以及滞后性等特点。
一般情况下,正常使用中的PID控制设备的使用数据会出现各种不同类型的大大小小的问题,所以在使用过程中所起的作用不是特别得让人满意。
以模糊控制原理作为设计基础的模糊自适应PID控制设备,是通过将模糊控制与常规控制的有效合并形成的,它能够有效滴客服常规控制设备在工作中存在的一系列问题,可以提高控制设备的控制效能。
1 蒸汽发生器水位系统控制的要求做为水位系统,它的主要目标就是保证舰船在前行的时候,不管客观环境如何变化,都能将水位之间的差距控制在一定的区域内,稳定在某一设定数值范围内。
通常情况下,压水堆核电站,如果运行的功率环境比较高,大概在20%满功率的时候,SG的水位系统是由蒸汽流量、SG水位、给水流量三冲量这几个要素形成的,在这里它们的主要功用是,通过蒸汽流量与给水流量使得舰艇在运动的时候能够处在正常的水位范围内,以保证SG水位的平衡性,对水位系统来说,蒸汽流量和给水流量之间的区别属于一种提前反应的信息;在功率不高的运行环境下,因为水流量具有不明确性,所以只能通过SG水位的单冲量作为进行调控的手段,因为不正常水位问题的存在,在功率不高的环境下,想要对SG水位进行控制则需要克服很多的困难。
2 模糊控制系统设计2.1 模糊自适应控制原理本文以模糊控制基本原理作为设计研究的理论依据,通过多次试验制成了蒸汽发生器的模糊自适应PID水位调控设备,如下图所示正是该设备的控制原理。
基于PLC的模糊PID水箱液位控制系统设计

基于PLC的模糊PID水箱液位控制系统设计摘要常规PID控制器结构简单、稳定性好、工作可靠,被广泛应用于过程控制中,但常规的PID在系统参数、工作环境发生变化时往往不能获得较好的控制效果。
采用基于PLC 知识和不依赖精确数学模型的模糊控制来解决这类问题。
本文首先通过机理法建立液位控制系统水箱的数学模型,为了改善调节过程的动态特性,采用串级控制,主调节器用模糊控制,副调节器采用PID控制。
根据液位系统的特征,选取合适的模糊控制规则和隶属度函数,建立模糊控制规则查询表,设计PID控制器和模糊控制器,将设计好的串级系统在Simulink软件上进行仿真,比较常规PID 控制器和模糊PID控制器的控制性能。
通过西门子SIMATIC S7-300 PLC 编程系统和力控组态软件6.0设计了西门子PLC 的常规PID系统和模糊PID控制算法。
通过组态软件力控6.0实时监控液位变化,将设计好的液位控制系统进行仿真。
实验表明模糊控制器具有良好的动、静态控制效果。
关键词:过程控制,PID控制,模糊控制,PLC,力控组态软件Based on PLC fuzzy PID water level control system designAbstractThe conventional PID controller simple structure, good stability, reliable working, are widely used in process control, but the conventional PID parameters in the system, working environment change often cannot obtain the good control effect. Based on PLC knowledge and not rely on the accurate mathematical model of fuzzy control to solve the problem.This paper first through the mechanism of water level control system method to establish the mathematical model, in order to improve the dynamic characteristics of the regulatory process, the cascade control, regulation is the fuzzy control, vice regulator PID control. According to the characteristics of liquid level system, to select the suitable fuzzy control rules and membership functions, establish the fuzzy control rules lookup, PID controller and fuzzy controller design, the design good ship machine system in Simulink software, and simulation is the conventional PID controller and fuzzy PID controller control performance.Through the Siemens SIMATIC S7-300 PLC programming system and the force control configuration software design of the 6.0 Siemens PLC conventional PID systems and fuzzy PID control algorithm. Through the configuration software force charged with 6.0 real-time monitoring level changes, Will design good level control system was simulated. Experiments show that the fuzzy controller has good dynamic and static control effect.Key Words: Process control, PID control, Fuzzy control, PLC, Force contro目录1 绪论 (1)1.1过程控制概述 (1)1.2模糊控制理论的产生和发展状况 (2)1.3PLC的特点及发展状况 (3)1.3.1 PLC的特点 (3)1.3.2 PLC技术发展动向 (5)1.3.3 可编程控制器的硬件组成 (6)1.4课题研究的主要内容与论文结构 (6)1.4.1 课题研究内容 (6)1.4.2 论文结构 (7)2 水箱液位控制系统设计及模型分析 (7)2.1水箱液位串级控制系统设计 (8)2.2水箱液位控制系统组成及工作原理 (9)2.3双容水箱数学模型建立与分析 (10)3 PID控制和模糊控制 (14)3.1PID控制 (14)3.1.1 PID简述 (14)3.1.2 数字式PID控制算法 (16)3.2模糊控制 (18)3.2.1 模糊控制器的基本结构 (18)3.2.2 模糊集合 (20)3.2.3 隶属度函数及其确定 (22)3.2.4 模糊推理 (24)3.3液位模糊控制器的设计 (25)4 系统硬件设计 (31)4.1西门子S7-300PLC (31)4.2液位控制系统组成 (32)5 PLC编程实现 (35)5.1西门子S7-300编程基础 (35)5.2STEP7编程 (36)5.3控制算法的实现 (38)5.3.1 程序流程图 (38)5.3.2 梯形图程序 (40)5.4组态软件力控6.0 (43)5.5常规PID与模糊PID控制器性能比较 (44)5.5.1 用MATLAB模糊逻辑工具箱设计模糊控制器 (44)5.5.2 SIMULINK仿真 (46)结论 (48)致谢 (49)参考文献 (50)附录 (52)1绪论1.1过程控制概述过程控制技术是利用测量仪表、控制仪表、计算机、通信网络等技术工具,自动获得各种变量的信息,并对影响过程状况的变量进行自动调节和操作,以达到控制要求等目的的技术。
模糊pid在液位控制系统中的应用研究
液位控制系统往往存在状态时变、非线性和滞后等诸多不确定性因素,采用传统的PID控制策略已不能满足性能要求。
本文将模糊PID控制应用在双容水箱液位控制中,首先建立双容水箱数学模型,设计了模糊PID控制器并混沌优化生成模糊规则。
在Matlab/ Simulink环境下建立双容水箱控制的仿真模型,对模糊PID控制系统进行仿真研究;最后利用MCGS组态软件设计了系统组态并在天煌THFCS-1A型过控综合自动化控制实验系统上进行了实验。
通过仿真和实验,证明该控制方法优于常规PID,此结果对于过程控制的理论研究和工程应用具有较好的参考价值。
在人们生活以及工业生产等诸多领域常常会涉及到液位及流量的控制问题,需要设计出合适的控制器来自动调整液位及流量,使得液位满足要求。
各种实际生产中的液位控制问题,我们将其简化为某种水箱的液位控制问题。
这种问题具有非线性及滞后特性等等,常规PID控制效果不好,鉴于模糊控制特性,许多学者将模糊控制和PID控制结合应用在液位控制上,将模糊PID应用在AE2000A过控实验装置中,但是模糊调节PID的规则不一定是最优规则;仅对单容水箱进行了研究;将模糊PID应用在THJ-2、THJ-2液位控制系统中;还有很多学者对此类问题进行过相应研究与应用,有优点也有缺陷。
本文通过优化模糊自整定PID得到最优规则,并且仿真验证,通过天煌THFCS-1A型过控综合自动化控制实验系统验证了模糊PID控制器在液位控制系统中的应用,当模型参数变化或受到扰动时,系统具有良好鲁棒性。
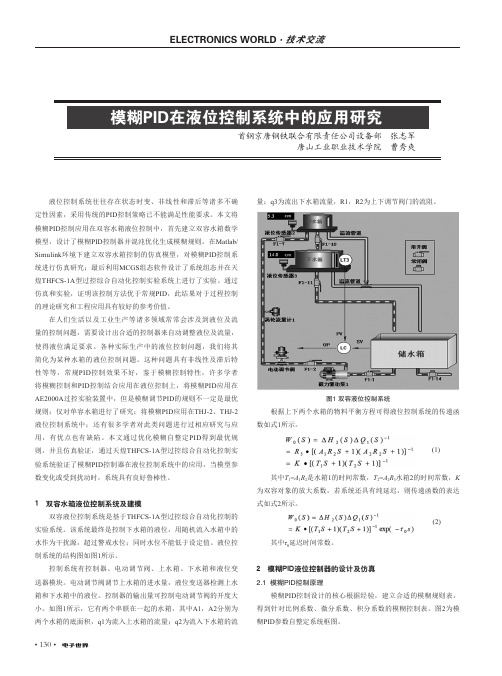
1 双容水箱液位控制系统及建模双容液位控制系统是基于THFCS-1A型过控综合自动化控制的实验系统。
该系统最终是控制下水箱的液位,用随机流入水箱中的水作为干扰源,超过警戒水位;同时水位不能低于设定值。
液位控制系统的结构图如图1所示。
控制系统有控制器、电动调节阀、上水箱、下水箱和液位变送器模块。
电动调节阀调节上水箱的进水量,液位变送器检测上水箱和下水箱中的液位。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
模糊PID 控制水位系统分析
摘要: pid调节规律对建立精确数学模型控制系统是非常有效的。
但对于那些具有非线性、时变不确定性的控制对象,应用传统的pid调节器就难以实现有效的控制。
文中提出了利用模糊pid控制技术,对水位进行控制,以使plc对不同模型参数的系统均具有较好的控制性能,实现对系统动静态参数的最优控制。
abstract: pid regulating law is very effective for establishing a precise mathematical model control system. however, for those control objects with non-linearity, time-varying uncertainty, applying the traditional pid regulator would be difficult to achieve effective control. this paper proposed tocontrol the water level by using indistinct pid control technology, so that the plc has better control performance on the system of different model parameters, to achieve optimal control of static and dynamic parameters of the system.
关键词: plc;模糊pid;模糊控制
key words: plc;indistinct pid;indistinct control
0 引言
对于pid控制技术,其工作稳定、可靠性高、鲁棒性强,且易于接受。
但是,工业生产过程中经常遇到大时滞、强扰动、被控对象
参数未知或是时变的系统,对这一类系统实施常规pid控制往往效果欠佳。
本文采用模糊自适应pid设计方法,根据人们要求的水位曲线,由计算机对系统进行监控,依据模糊推理判据,实现对任何一种模型参数的系统都能自动调整其pid参数,使输出与水位曲线趋于一致,实现快速响应特性与超调量最优的统一。
1 模糊控制原理
模糊控制器是一种近年来发展起来的新型控制器,其优点是不要求掌握被控对象的精确数学模型,而根据人工规则组织决策表,且由该表决定控制量的大小。
模糊控制或模糊自动控制系统是以模糊数学,即模糊集合论、模糊语言知识及模糊逻辑规则等作为理论基础;以计算机控制技术、自动控制理论作为技术基础的自动控制系统。
模糊控制模仿人的思维方式,计算控制量时并不需要参数的精确量,而是以参数的模糊信息为基础,通过模糊推理得到控制量的模糊形式,然后再经过反模糊化处理输出具体的控制量。
其控制方框图如下图1所示。
2 控制系统
本文的控制系统结构框图如图2所示:液灌ⅰ中的水通过水泵注入到液灌ⅱ中,电脑通过plc和固态继电器使水泵工作,液灌ⅱ中的水位随之持续上升。
当液灌ⅱ中的水达到某一百分比时,水位变送器发出的信号通过plc在电脑中与设定值进行比较,若大于设定值,电脑通过plc和手操器使电动调节阀开大;若小于给定值,电
脑通过plc和手操器使电动调节阀开小;若相等,说明电动调节阀出水量和进水量应相等,保持动态平衡。
对温度的控制:若要使液灌ⅱ中的温度达到某一设定值,就要在电脑上进行设定,通过测量温度变送器发出4~20ma模拟信号,该值反映了实际值的大小。
若实际值小于设定值,电脑通过plc和固态继电器使加热器工作,从而使水温上升,当实际值达到设定值时加热器停止工作。
其工作流程图如图3所示。
在“组态王6.5”软件中,工作人员只需在电脑前操作即可。
用鼠标点击电脑上的按钮即可控制水泵的启动、停止,从而控制水位和温度值。
在本控制系统中,共应用了温度的升降温判断程序、水位的模糊pid运算程序、滤波后水位运算程序、加热器通、断程序四个程序。
下面重点介绍水位的模糊pid运算程序。
3 模糊pid控制的应用
点击“pid设置”可以看到一个小界面,如图4所示。
在此界面上可以设定模糊p、i、d参数的大小。
在“自动”时用此界面。
在图下方有温度历史、实时曲线与水位历史、实时曲线界面的切换按钮。
管理员可通过“用户登录”输入口令,这样该界面才能运行。
“注销”可以停止运行该界面。
“退出”可以退出该软件。
4 实验结果
系统运行后通过水位实时趋势曲线显示水位设定值和当前值(实际值),水平线为水位设定值曲线,波浪线为水位的测量值曲线,
如图5所示。
该图反映了通过pid算法后系统实际水位值逼近设定水位值的情况,可以看出实际值与设定值的误差较大,实际值波动较大。
经过对比,采用模糊pid算法后实际值与设定值的误差较小,实际值比较稳定,如图6所示,取得了很好的控制效果。
5 结束语
本文通过控制水位,研究了模糊-pid算法的原理、结构、应用等。
实践证明,采用模糊-pid算法控制器不仅具有良好的动态及稳态特性,而且对系统时延和阶次具有鲁棒性,可以实现最优化控制。
参考文献:
[1]俞光昀.pic系列单片机应用技术[m].北京:电子工业出版社,2000,10,122-168.
[2]黄继昌等.传感器工作原理及应用实例[m].北京:人民邮电出版社,1998,5,155-171.
[3]2003 亚控公司,组态王6.5使用手册,北京:北京亚控科技发展有限公司,1999,4 286-455.
[4]殷兴光.fuzz-pid算法在物位、温度控制中的应用[c].咸阳:陕西科技大学工程硕士学位论文,2004,78-99.
[5]a.haj-ali and h.ying the structure of a class of mandani fuzzy controllers with nonlinear input fuzzy sets 2003 ieee international conference on fuzzy systems 523~52.
[6]jia-xin chen,wei li application of fuzzy control pid
algorithm intemperature controlling systems machine learning and cybernetics, 2003 international conference on 2601 2604 vo1.4.
[7]mohand mokhtari,michel marie matlab与simulink.i程应用(赵彦玲吴淑红译)北京:电子工业出版社,2002.
[8]余永权,曾碧.单片机模糊逻辑控制[m].北京:北京航空航天大学出版社,1999.
[9]张化光,何希勤.模糊白适应控制理论及其应用[m].北京:北京航空航大人学出版社,2002.。