步进电机PLC控制的研究设计
PLC实现步进电机的正反转和调整控制

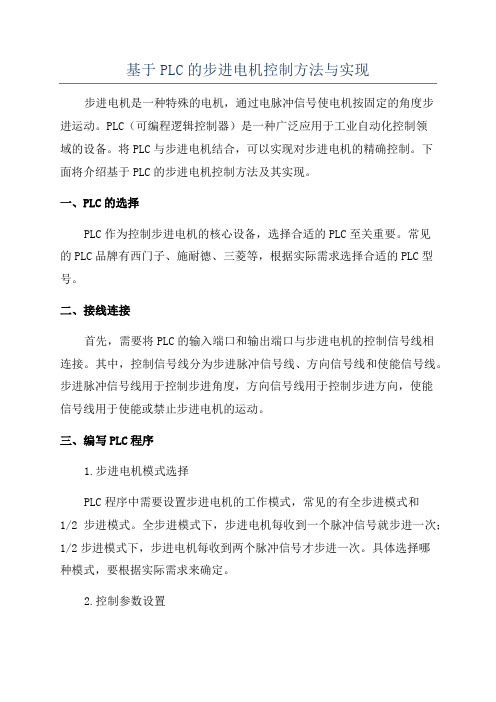
实训课题三PLC实现步进电机正反转和调速控制一、实验目的1、掌握步进电机的工作原理2、掌握带驱动电源的步进电机的控制方法3、掌握DECO指令实现步进电机正反转和调速控制的程序二、实训仪器和设备1、FX-48MR PLC一台2N2、两相四拍带驱动电源的步进电机一套3、正反切换开关、起停开关、增减速开关各一个三、步进电机工作原理步进电机是纯粹的数字控制电动机,它将电脉冲信号转换成角位移,即给一个脉冲信号,步进电机就转动一个角度,图3-1是一个三相反应式步进电机结图;从图中可以看出,它分成转子和定子两部分;定子是由硅钢片叠成,定子上有六个磁极大极,每两个相对的磁极N、S极组成一对;共有3对;每对磁极都绕有同一绕组,也即形成1相,这样三对磁极有3个绕组,形成三相;可以得出,三相步进电机有3对磁极、3相绕组;四相步进电机有4对磁极、四相绕组,依此类推;反应式步进电动机的动力来自于电磁力;在电磁力的作用下,转子被强行推动到最大磁导率或者最小磁阻的位置,如图3-1a所示,定子小齿与转子小齿对齐的位置,并处于平衡状态;对三相异步电动机来说,当某一相的磁极处于最大导磁位置时,另外两相相必处于非最大导磁位置,如图3-1b所示,即定子小齿与转子小齿不对齐的位置;把定子小齿与转子小齿对齐的状态称为对齿,把定子小齿与转子小齿不对齐的状态称为错齿;错齿的存在是步进电机能够旋转的前提条件,所以,在步进电机的结构中必须保证有错齿的存在,也就是说,当某一相处于对齿状态时,其它绕组必须处于错齿状态;本实验的电机采用两相混合式步进电机,其内部上下是两个磁铁,中间是线圈,通了直流电以后,就成了电磁铁,被上下的磁铁吸引后就产生了偏转;因为中间连接的电磁铁的两根线不是直接连接的,是采用在转轴的位置用一根滑动的接触片;这样如果电磁铁转过了头,原先连接电磁铁的两根线刚好就相反了,所以电磁铁的N极S极就和以前相反了;但是电机上下的磁铁是不变的,所以又可以继续吸引中间的电磁铁;当电磁铁继续转,由于惯性又转过了头,所以电极又相反了;重复上述过程就步进电机转了;根据这个原理,如图3-2所示,两相步进电机的转动步骤,以正转为例:由图可见,现相异步电机正转过程分为四个步骤,即A相正方向电流、B相正方向电流、A向反方向电流和B相反方向电流;反转工作的顺序与之相反;A、B两相线圈不是固定的电流方向,这与其它步进电机的控制逻辑有所不同;因此,控制步进电机转动时,必须考虑用换相的思路设计实验线路;可以根据模拟驱动电路的功能和plc必须的逻辑关系进行程序设计;四、采用步进电机驱动器的控制方式利用步进电机驱动器可以通过PLC的高速输出信号控制步进电机的运动方向、运行速度、运行步数等状态;其中:步进电机的方向控制,只需要通过控制U/D端的On和Off就能决定电机的正转或反转;将光耦隔离的脉冲信号输入到CP端就能决定步进电机的速度和步数;控制FREE信号就能使电机处于自由状态;因此PLC的控制程序相当简单,只需通过PLC的输出就能控制步进电机的方向、转速和步数;不必通过PLC控制电机换相的逻辑关系,也不必另外添加驱动电路;实训面板见图3-4,梯形图见图3-5;本程序是利用D0的变化,改变T0的定时间隔,从而改变步进电机的转速;通过两个触点比较指令使得D0只能在10~50之间变化,从而控制步进间隔是1S~5S之间,I/O分配表见表3-1;表3-1 I/O分配表图3-5 梯形图五、采用PLC直接控制步进电机方式对于两相步进电机控制,根据其工作原理,必须考虑其换向的控制方式,因此将其步骤用代号分解,则为:①实现电流方向A+→A-、②实现电流方向B+→B-、③实现电流方向A-→A+、④实现电流方向B-→B+;如果反转则按照④、③、②、①的顺序控制;PLC的I/O分配表按照表3-2,分配图按照图3-6,梯形图见图3-7;表3-2 PLC的I/O分配表步进电机正反转和调速控制的梯形图如图3-7所示,程序中采用积算定时器T246为脉冲发生器,因系统配置的PLC为继电器输出类型,其通断频率过高有可能损坏PLC,故设定范围为K200 ms~1000ms,则步进电机可获得1~10步/秒的变速范围,X0为ON时,正转,X1为ON时;反转;X0为ON时,输出正脉冲列,步进电机正转;当X0为ON时,T246以D0值为预置值开始计时,时间到,T246导通,执行DECO指令,根据D1数值首次为0,指定M10输出,Y0、Y4为ON,步进电机A相通电,且实现电流方向A+→A-;D1加1,然后,T246马上自行复位,重新计时,时间到,T246又导通,再执行DECO指令,根据D1数值此次为1,指定M11输出,Y1、Y5为ON,步进电机B相通电,且实现电流方向B+→B-;D1加1,T246马上又自行复位,重新计数,时间到,T246又导通,再执行DECO指令,根据D1数值此次为2,指定M12输出,Y2、Y6为ON,步进电机A相通电,且实现电流方向A-→A+;D1加1,T246马上又自行复位,重新计时,时间到,T246又导通,再执行DECO命令,根据D1数值此次为3,指定M13输出,Y3、Y7为ON,步进电机B相通电,且实现电流方向B-→B+;当M13为ON,D1复位,重新开始新一轮正脉冲系列的产生;X1为ON时,输出反脉冲列,步进电机正转;当X1为ON时,T246以D0值为预置值开始计时,时间到,T246导通,执行DECO指令,根据D1数值首次为0,指定M10输出,Y3、Y7为ON,步进电机B相通电,且实现电流方向B-→B+;依此类推,完成实现A相反方向电流、B相正方向电流、A相正方向电流三个脉冲列输出;当M13为ON,D1复位,重新开始新一轮正脉冲系列的产生;当X2为ON时,程序由自动转为手动模式,当X0X1为ON时,每点动一次X3,对D1数值首次为0加1,分别指定M10、M11、M12及M13输出,从而完成一轮正反脉冲系列的产生;第73步中,当X4为ON,M8012为ON,M4为ON,且D0当前值<K1000,则D0即加1;第88步中,当X5为ON,M8012为ON,M4为ON,且D0>K200,由D0即减1;六、程序调试及执行调速时按X4或X5按钮,观察D0的变化,当变化值为所需速度时释放;如动作情况与控制要求一致表明程序正确,保存程序;如果发现程序运行与控制要求不符,应仔细分析,找出原因,重新修改,直到程序与控制要求相符为止;七、实训思考练习题如果调速需经常进行,可将D0的内容显示出来,试设想方案,修改程序,并实验;图3-7 步进电机正反转和调速控制程序说明1、步骤0,指定脉冲序列输出顺序移位值;2、当X0为ON,输出正脉冲序列,电机正转;当X1为ON,输出负脉冲序列,电机反转;3、当X2为ON,程序由自动转为手动模式,由X3状态单步触发电机运转;4、当X4为ON,如D0小于1000,每100ms对D0加1,从而延长每脉冲输出的时间间隔,降低电机的转速;5、当X5为ON,如D0大于200,每100ms对D0减1,从而缩短每脉冲输出的时间间隔,加快电机的转速;6、T0为频率调整限制;。
基于PLC的步进电机控制方法与实现
基于PLC的步进电机控制方法与实现步进电机是一种特殊的电机,通过电脉冲信号使电机按固定的角度步进运动。
PLC(可编程逻辑控制器)是一种广泛应用于工业自动化控制领域的设备。
将PLC与步进电机结合,可以实现对步进电机的精确控制。
下面将介绍基于PLC的步进电机控制方法及其实现。
一、PLC的选择PLC作为控制步进电机的核心设备,选择合适的PLC至关重要。
常见的PLC品牌有西门子、施耐德、三菱等,根据实际需求选择合适的PLC型号。
二、接线连接首先,需要将PLC的输入端口和输出端口与步进电机的控制信号线相连接。
其中,控制信号线分为步进脉冲信号线、方向信号线和使能信号线。
步进脉冲信号线用于控制步进角度,方向信号线用于控制步进方向,使能信号线用于使能或禁止步进电机的运动。
三、编写PLC程序1.步进电机模式选择PLC程序中需要设置步进电机的工作模式,常见的有全步进模式和1/2步进模式。
全步进模式下,步进电机每收到一个脉冲信号就步进一次;1/2步进模式下,步进电机每收到两个脉冲信号才步进一次。
具体选择哪种模式,要根据实际需求来确定。
2.控制参数设置根据步进电机的特性和需求,需要设置脉冲频率、步进电机角度、加速度、减速度等控制参数。
这些参数的设置会直接影响步进电机的运动效果和精度。
3.控制逻辑编写根据具体应用场景,设计步进电机的运动逻辑。
例如,可以设置按下按钮时步进电机顺时针旋转,松开按钮时停止旋转;也可以设置根据传感器的信号来控制步进电机的运动。
通过控制逻辑的编写,实现对步进电机的精确控制。
四、运行程序并调试五、实现布线和安装根据实际需求,进行步进电机的布线和安装。
注意布线过程中要避免信号干扰和线路短路等问题,确保步进电机能够正常工作。
总结:基于PLC的步进电机控制方法主要包括PLC的选择、接线连接、编写PLC程序、运行程序及调试和布线和安装等步骤。
通过合理选择PLC、编写控制逻辑和调整参数,可以实现对步进电机的精确控制。
步进电机控制PLC课程设计

步进电机控制PLC课程设计一、课程目标知识目标:1. 学生能理解步进电机的原理、结构和应用场景;2. 学生能掌握PLC在步进电机控制中的编程方法和技巧;3. 学生了解步进电机与PLC接口的硬件连接和调试方法;4. 学生掌握步进电机速度、位置和加速度等参数的调整方法。
技能目标:1. 学生能运用所学知识,设计并实现简单的步进电机控制程序;2. 学生具备调试和优化步进电机控制系统的能力;3. 学生能够结合实际需求,选择合适的PLC和步进电机进行项目设计。
情感态度价值观目标:1. 培养学生对自动化控制技术的兴趣,激发学生学习热情;2. 培养学生团队协作、沟通表达的能力,提高学生的综合素质;3. 培养学生严谨、务实的科学态度,树立正确的价值观。
课程性质:本课程为实践性较强的课程,旨在让学生在实际操作中掌握步进电机控制技术。
学生特点:学生具备一定的电气基础和PLC编程知识,对步进电机控制有一定了解。
教学要求:结合实际案例,以任务驱动的方式进行教学,注重培养学生的动手能力和创新能力。
通过本课程的学习,使学生能够将理论知识应用于实际项目中,提高学生的综合应用能力。
二、教学内容1. 步进电机原理与结构- 步进电机的分类、工作原理- 步进电机的结构特点及参数2. PLC在步进电机控制中的应用- PLC与步进电机的连接方式- 步进电机控制程序编写方法- PLC编程软件的使用3. 步进电机控制系统的设计与实现- 系统硬件设计:PLC选型、步进电机选型、接口电路设计- 系统软件设计:步进电机控制算法、PLC程序设计4. 步进电机控制系统的调试与优化- 系统调试方法与步骤- 常见问题及解决方法- 系统性能优化策略5. 实践项目案例分析- 案例一:简易步进电机控制系统设计- 案例二:复杂步进电机控制系统设计教学内容安排与进度:第一周:步进电机原理与结构第二周:PLC在步进电机控制中的应用第三周:步进电机控制系统的设计与实现第四周:步进电机控制系统的调试与优化第五周:实践项目案例分析及讨论教材章节关联:本教学内容与教材中“第三章 步进电机控制技术”和“第四章 PLC控制技术”相关章节紧密关联。
步进电机控制方法plc

步进电机控制方法plc随着现代制造业的飞速发展,步进电机作为一种精密控制技术在自动化设备中得到广泛应用,而PLC(可编程逻辑控制器)则是控制步进电机的常见方案之一。
在工业生产中,步进电机的控制方法多种多样,其中结合PLC技术进行控制是一种高效可靠的方式。
本文将介绍一些常见的步进电机控制方法,并分析PLC在这些控制方法中的应用。
正转和反转控制正转和反转控制是步进电机最基本的控制方法之一。
通过控制电机输入的脉冲信号的频率和方向,可以实现步进电机的正转和反转。
在PLC中通常会使用计数器来记录脉冲信号的数量,从而控制电机的转动角度和方向。
通过设定计数器的值和控制脉冲信号的输出频率,可以精确控制步进电机的转动。
速度控制除了控制电机的方向外,控制步进电机的速度也是至关重要的。
在工业自动化系统中,需要根据不同的生产需求来调整步进电机的转速。
PLC可以通过调节输出脉冲信号的频率来实现步进电机的精确速度控制。
通过监控电机的转速并根据实际情况进行调整,可以保证生产过程的稳定性和效率。
位置控制在很多自动化系统中,需要步进电机按照预先设置的位置进行精确定位。
PLC在位置控制中发挥了关键作用。
通过监测电机的位置信息以及输入的控制指令,PLC可以精确地控制步进电机的位置。
在工业生产中,位置控制常常用于需要高精度定位的场景,如自动装配线和自动化仓储系统等。
脉冲控制步进电机的运动是通过输入一定数量的脉冲信号来实现的。
因此,脉冲控制是控制步进电机最基本的方法之一。
PLC通过输出一定频率和数量的脉冲信号,可以精确控制步进电机的运动。
在工业生产中,通常会根据实际需求设定脉冲信号的参数,如脉冲频率、脉冲数量和脉冲方向等,从而实现对步进电机的精确控制。
总结步进电机作为一种精密控制技术,在工业自动化领域具有重要的应用意义。
结合PLC技术可以实现对步进电机的高效控制,包括正转和反转控制、速度控制、位置控制和脉冲控制等。
通过合理设计控制方案并结合PLC的灵活性和可编程特性,可以实现对步进电机运动的精确控制,从而提高生产效率和产品质量。
PLC实现步进电机的正反转及调整控制
PLC实现步进电机的正反转及调整控制
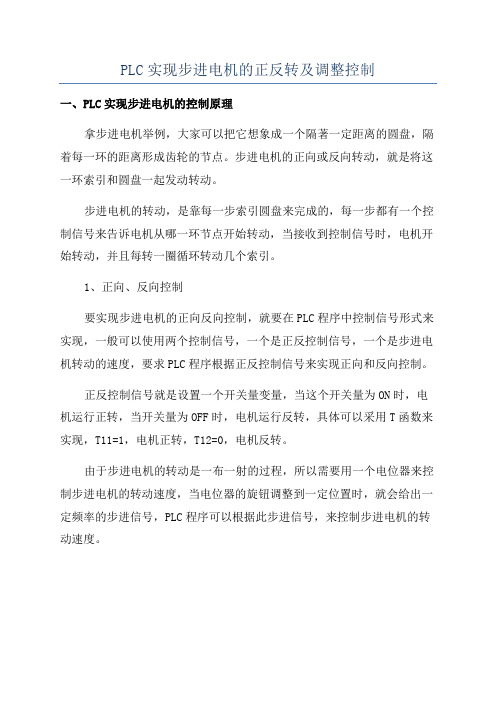
一、PLC实现步进电机的控制原理
拿步进电机举例,大家可以把它想象成一个隔著一定距离的圆盘,隔着每一环的距离形成齿轮的节点。
步进电机的正向或反向转动,就是将这一环索引和圆盘一起发动转动。
步进电机的转动,是靠每一步索引圆盘来完成的,每一步都有一个控制信号来告诉电机从哪一环节点开始转动,当接收到控制信号时,电机开始转动,并且每转一圈循环转动几个索引。
1、正向、反向控制
要实现步进电机的正向反向控制,就要在PLC程序中控制信号形式来实现,一般可以使用两个控制信号,一个是正反控制信号,一个是步进电机转动的速度,要求PLC程序根据正反控制信号来实现正向和反向控制。
正反控制信号就是设置一个开关量变量,当这个开关量为ON时,电机运行正转,当开关量为OFF时,电机运行反转,具体可以采用T函数来实现,T11=1,电机正转,T12=0,电机反转。
由于步进电机的转动是一布一射的过程,所以需要用一个电位器来控制步进电机的转动速度,当电位器的旋钮调整到一定位置时,就会给出一定频率的步进信号,PLC程序可以根据此步进信号,来控制步进电机的转动速度。
PLC控制步进电机的系统设计(毕业设计)

摘要本文主要阐述了三相三拍步进电动机结构和步进电机原理,以及对步进电机的调速和正反转的研究。
采用PLC基本逻辑指令和常用指令的方法对步进电机调速很正反转控制。
步进电机是一种将脉冲信号转换成直线位移或角位移的执行元件。
步进电机的输出位移量与输入脉冲个数成正比,其速度与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移量、速度和方向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变都可在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。
SummaryThis paper describes the structure of three-phase three-beat stepper motors and stepper motor principle,and the stepper motor speed control and reversing research. Using PLC basic logic instructions and common method of instruction is reversing the stepper motor speed control.Stepper motor is a pulse signal into a linear displacement or angular displacement of the actuator.The output of the stepper motor displacement is proportional to the number of input pulses,the speed and unit time input pulses (ie pulse frequency)is proportional to its steering and pulse distribution phase stepper motor winding phase sequence of the.So long as the control command pulse number, frequency and phase sequence of the motor windings are energized,the output can be controlled stepper motor displacement, velocity and direction.Stepper motor has good control performance, and its start,stop,reverse and other changes in the way of any operation can be completed within a few pulses, and the availability of high control accuracy,and have been widely used。
PLC高速脉冲输出控制步进电机

PLC高速脉冲输出控制步进电机1. 背景介绍步进电机是一种常见的电动机类型,它具有精准的位置控制和高速运动的特点。
在很多工业自动化应用中,步进电机常常需要与PLC(可编程逻辑控制器)配合使用,以实现精准的位置控制和高速脉冲输出。
本文档将介绍如何通过PLC实现高速脉冲输出控制步进电机的方法和步骤。
2. 所需材料在开始之前,我们需要准备以下材料:•PLC控制器•步进电机驱动器•步进电机•连接线•电源请确保以上材料齐全并符合各自的规格要求。
3. PLC高速脉冲输出控制步进电机的步骤步骤一:连接电源和PLC控制器首先,将电源连接到PLC控制器上。
确保电源的电压和PLC控制器的额定电压匹配。
然后将PLC控制器的电源线连接到电源上,并确保连接牢固。
步骤二:连接步进电机驱动器和PLC控制器将步进电机驱动器的电源线连接到电源上,并确保连接牢固。
然后,将步进电机驱动器的控制线连接到PLC控制器上,确保连接正确。
步骤三:连接步进电机和步进电机驱动器将步进电机的线束连接到步进电机驱动器上,确保连接正确。
根据步进电机的规格要求,选择正确的接线方法。
步骤四:PLC编程在PLC编程软件中进行编程,以实现高速脉冲输出控制步进电机。
以下是一个简单的PLC编程示例:BEGINVARmotor_output: BOOL := FALSE; -- 步进电机控制信号pulse_delay: TIME := T#10MS; -- 脉冲延迟时间,控制步进电机的速度END_VAR-- 主程序WHILE TRUE DO-- 输出一个脉冲信号控制步进电机运动motor_output := NOT motor_output;DELAY pulse_delay; -- 延迟一段时间,控制步进电机的速度END_WHILE;END;以上的PLC程序实现了一个简单的高速脉冲输出控制步进电机的功能。
在主程序中,通过循环不断地输出一个脉冲信号来控制步进电机的运动,同时通过调整延迟时间来控制步进电机的速度。
步进电机的PLC控制系统设计

Design of PLC Control System for Stepper MotorWu Ziming,Zhao Weixue(Heilongjiang University of Business and Technology, Harbin, Heilongjiang 150025, CHN)【Abstract】Firstly, designs the overall scheme of the stepper motor speed regulation electrical control system, and analyzes and selects the functions of the existing stepper drive functional mod⁃ules based on the corresponding modules. It mainly includes PLC control module, sensor module, motor drive module, power supply, and other parts. Secondly, a programming tool for the stepper motor speed control electrical control system was provided to control the sensors and the specific program for controlling the motor, and automatic cyclic positioning was achieved. In the field ex⁃periment, the specific methods of multiple working modes of the system are debugged, the physical objects of step positioning are analyzed, and the man-machine interface is added to realize the vi⁃sualization of the step motor speed control system.Key words:stepper motor;PLC;sensors;man-machine interface1引言在工业4.0的时代,步进驱动自动化的应用越来越广泛,其中,又以基于PLC的自动化控制系统最先进。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
[自控・检测]
收稿日期:2006204203作者简介:韩志强(1981-
),男,河北成安人,现为长安大学在读硕士研究生,研究方向为机械设计。
步进电机PLC 控制的研究设计
韩志强,刘晓婷
(长安大学,陕西西安710064)
摘 要:在PL C 步进电机控制中,输入到其线圈组中的脉冲数或脉冲频率可控制步进电机的角位移和速度。
在给步进电机的各线圈组输入脉冲时,需先经脉冲分配器进行分配。
脉冲分配器可由软件实现,也可由硬件组成。
以三菱的FX 2系列为例,讨论了步进电机的PLC 控制系统的硬件设计方法。
关 键 词:可编程控制器(PL C );步进电机;接线图;程序指令表
中图分类号:TM 301.2 文献标志码:A 文章编号:100522895(2006)0420114202
0 引 言
步进电机是一种将脉冲信号转换成直线位移或角位移的执行元件。
步进电机的输出位移量与输入脉冲个数成正比,其速度与单位时间内输入的脉冲数(即脉冲频率)成正比,其转向与脉冲分配到步进电机的各相绕组的相序有关。
所以只要控制指令脉冲的数量、频率及电机绕组通电的相序,便可控制步进电机的输出位移量、速度和方向。
步进电机具有较好的控制性能,其启动、停车、反转及其它任何运行方式的改变都可在少数脉冲内完成,且可获得较高的控制精度,因而得到了广泛的应用。
可编程控制器(P rogramm ab le L ogic Con tro ller ,通常称PL C )是适应工业环境,简单易懂,操作方便,可靠性高的新一代通用工业控制装置。
它能够完成较精确的位置控制。
利用PL C 控制步进电机,其脉冲分配可以由软件实现,也可由硬件组成。
本文论述了采用硬件控制的方法。
步进电机位置控制系统以三菱FX 2N 2n M T PL C 为主控单元,以步进电机驱动器为驱动单元,以0.6°步距角的三相步进电机为执行单元。
通过PL C 控制脉冲的发生个数,从而控制步进电机的运转角度,实现对位置的精确控制。
1 步进电机PLC 控制系统I O 接线图的设计
以三相步进电机为例,步进电机通常设有加速、减速控制及正反转控制等控制方式。
按控制要求可设计出步进电机的PL C 控制系统I O 接图(见图1)。
图中:CP
—脉冲信号输入端子;
C W —方向信号输入端子;EN —使能信号输入端子。
图1 步进电机的PL C 控制系统I O 接线图2 步进电机脉冲频率的变化规律
步进电机在启动和停止时有一个加速及减速过程,且加速速度越小则冲击越小,动作越平稳,所以步进电机工作一般要经历以下的变化过程:加速—恒速(高速)—减速—恒速(低速)—停止。
因步进电机转速与脉冲频率成正比,所以输入步进电机的脉冲频率也要经历一个类似的变化过程,其变化规律见图2。
可见在步进电机启动时要使脉冲升频,停车时使脉冲降频。
由于步进电机驱动器在输入脉冲200H z 时处于震荡区内,容易损坏内部元件,而在200H z 以下运转速度较慢,效率较低,故一般采用350H z 作为脉冲的低频起点。
经测试,轻载时高频脉冲可达到6.8kH z 。
第24卷第4期2006年12月
轻工机械
L ight I ndustry M achi nery
V o l .24,N o.4.
D ec .,2006
图2 步进电机脉冲频率的变化规律
3 FX 2N 的部分指令简介
斜坡信号
S 1
S 2D N FN C 67RAM P
D 1
D 2
D 3
K 1000
预先将初值与目标写入数据寄存器D 1、D 2,启动后,D 3内容从D 1到D 2慢慢变化,移动时间为N 次扫描,传输完毕后M 8029置ON 。
脉冲输出
S 1
S 2D FN C 57PL SY
K 1000
D 0
Y 0
S 1指定频率,2~20H z 执行中可更变。
S 2指定发生脉冲。
D 指定脉冲输出Y 的地址号
脉冲占空比为50%,执行完毕M 8029置ON .
D PL SY 为32位指令
4 控制系统的部分程序指令
LD M 800∥运行监视SUB D 2D 5D 7SET M 8039SET
M 30MOV K 4D 8039∥设定恒定扫描周期为4秒LD
M 30LD X 2∥正转RST M 20OR M 10RAM P D 9D 4D 10K40∥变频
AN I X 3RST
M 8029OU T M 10∥反转DPL SY D 10D 2Y 0∥脉冲输出
LD X 3OU T C 235D 7∥监测降频起点
OR M 11AND M 8029AN I
X 2RST C 235RST Y 1LD
C 235
OU T M 11MOV P D 4D 9MUL D 0K 8D 2MOV P K 350D 4
SET Y 2SET M 20LD
M 20
MOV P K 6500D 4MOV P K 1100D 5
5 结 论
利用可编程控制器可方便地实现对电机的速度和位置进行控制,可靠地实现各种步进电机的操作,完成各种复杂的工作。
它是一种先进的工业自动化设备,可广泛地在造纸、食品、包装以及其他轻工机械中得到应用。
参考文献:
[1] 张万忠.可编程控制器应用技术[M ].北京:化学工业出版社,
2001.
[2] 郑瑜平.可编程控制器[M ].北京:北京航空航天大学出版社,
1997.
[3] 上海乐兹科技发展有限公司.三菱微型可编程控制FX 2N 编程手
册[Z ].上海:上海乐兹科技发展有限公司,2005.
[4] 北京艾博瑞林电子公司.步进电机驱动使用说明书[Z ].北京:北
京艾博瑞林电子公司,2005.
[5] 季汉棋.用PL C 控制数字变频器改变异步电动机转速的实现[J ].
轻工机械,2006,24(1):104-106
Research of PLC to the Con trol of Stepp i ng M otors
HAN Zh i 2qiang ,L I U X iao 2ting
(Chang’an U niversity ,X i’an 710064,Ch ina )
Abstract :In the PL C con tro l of stepp ing m o to rs ,the num bers of i m p u lse o r frequency of i m pu lse can con tro l the angle disp lacem en t and velocity .W hen the i m pu lse need be distribu ted in to distribu ting i m p lem en t ,it can be designed by softw are and hardw are .T h is thesis takes the FX 2f or ex am p le to con trol PL C .
Key words :p rogramm ab le logic con tro ller (PL C );stepp ing m o to r driver ;w iring diagram ;p rogramm e reperto ire
[信息・简讯]
・专利摘要・
造纸打浆磨片和精浆机定子转子
一种用于纤维打浆并能使纤维均匀地切断和分丝帚化的造纸打浆机磨片和精浆机的定子、转子。
它由磨齿、挡圈、磨盘、固定螺孔组成。
特征是磨齿与磨盘的夹角a 为一倾角,0<a <90°。
其安装结构分别与普通打浆机磨片和精浆机的定子、转子兼容。
其适宜的打浆浓度相对普通磨片较高,打浆度上升相对较慢,打浆能耗低,寿命长,生产成本低。
(申请号:02238684.X )
・
511・ [自控・检测] 韩志强,等 步进电机PL C 控制的研究设计。