LED显示屏像素定位与标记的一种方法
LED显示屏灯点定位排序法及应用
第36卷㊀第4期2021年4月㊀㊀㊀㊀㊀㊀㊀液晶与显示㊀㊀㊀C h i n e s e J o u r n a l o fL i q u i dC r y s t a l s a n dD i s p l a ys ㊀㊀㊀㊀㊀V o l .36㊀N o .4㊀A pr .2021㊀㊀收稿日期:2020G10G16;修订日期:2020G11G23.㊀㊀基金项目:十三五国家重点研发计划(N o .2017Y F B 0404800);季华实验室科技研发项目(N o .X 190221T F 190)S u p p o r t e db y N a t i o n a lK e y R e s e a r c ha n dD e v e l o p m e n tP r o gr a mo fC h i n a (N o .2017Y F B 0404800);J iH u a L a b o r a t o r y S c i e n c e a n dT e c h n o l o g y R e s e a r c ha n dD e v e l o p m e n tP r o je c t (N o .X 190221T F 190)㊀㊀∗通信联系人,E Gm a i l :z h e n gx f @c c x i d a .c o m 文章编号:1007G2780(2021)04G0575G09L E D 显示屏灯点定位排序法及应用徐子程1,郭贵新1,郑喜凤1,2,3∗,周㊀洋1(1.长春希达电子技术有限公司,吉林长春130103;2.中国科学院长春光学精密机械与物理研究所,吉林长春130033;3.季华实验室,广东佛山528200)摘要:为实现对L E D 显示屏的亮色度校正,研究了一种可自动对L E D 显示屏死灯位置进行补点,并适用于图像采集过程中存在图像倾斜情况的灯点定位排序算法.首先对图像进行二值化处理,计算出所有灯点的中心坐标;然后通过极值法和二向排序法完成了图像中4角灯点的预定位;接着利用线性归类排序法对边界点进行定位排序,通过差值筛选法定位死灯并自动补点,利用边界点坐标与死灯位置理论坐标对所有直线进行归类排序,完成显示屏所有灯点的定位排序.最后介绍了L E D 显示屏亮度均匀性计算方法,通过亮度校正实验验证灯点定位排序结果的准确性.实验结果表明,校正前显示屏亮度均匀性为73.7%,校正后显示屏的亮度均匀性提高至98.7%.显示屏亮度均匀性已经达到人眼可接受的范围内,校正效果较好,灯点定位排序精度较高.关㊀键㊀词:L E D 显示屏;灯点定位排序;死灯位置自动补点;亮度均匀性校正中图分类号:T N 27㊀㊀文献标识码:A㊀㊀d o i :10.37188/C J L C D.2020G0278P o s i t i o n i n g a n d s o r t i n g m e t h o d a n d a p pl i c a t i o no f L E Dd i s p l a ypo i n t X UZ i Gc h e n g 1,G U O G u i Gx i n 1,Z H E N G X i Gf e n g 1,2,3∗,Z HO U Y a n g1(1.C h a n g c h u nC e d a rE l e c t r o n i c sT e c h n o l o g y C o .,L t d .,C h a n gc h u n 130103,C h i n a ;2.C h a n g c h u nI n s t i t u t e o f O p t i c s ,F i n eM e c h a n i c s a n dP h ys i c s ,C h i n e s eA c a d e m y o f S c i e n c e s ,C h a n gc h u n 130033,C h i n a ;3.J iH u aL a b o r a t o r y ,F o s h a n 528200,C h i n a )A b s t r a c t :I no r d e r t o r e a l i z e t h eb r i g h t n e s s a n dc h r o m a t i c i t y c o r r e c t i o no f t h eL E Dd i s p l a y sc r e e n ,a l a m pp o i n t p o s i t i o n i n g a nd s o r t i n g a l g o r i t h mt h a t c a n a u t o m a t i c a l l y c o m pe n s a t e t h e d e a d l a m p po s i t i o n o f t h eL E Dd i s p l a y s c r e e na n d i ss u i t a b l e f o r t h e i m a g et i l td u r i n g t h e i m a g ea c qu i s i t i o n p r o c e s s i s s t u d i e d .F i r s t l y ,t h e i m a g e i sb i n a r i z e d t o c a l c u l a t e t h e c e n t e r c o o r d i n a t e s o f a l l t h e l i gh t p o i n t s ;t h e n t h e f o u r Gc o r n e r l i g h t p o i n t s i n t h e i m a g e a r e p r e Gp o s i t i o n e db y t h e e x t r e m e v a l u em e t h o d a n d t h e t w o Gw a y s o r t i n g m e t h o d .T h e n ,t h e b o u n d a r y p o i n t s a r e p r o c e s s e d b y t h e l i n e a r s o r t i n g m e t h o d p o s i t i o n i n g. All Rights Reserved.a n d s o r t i n g,t h ed e a dl i g h t sa r e l o c a t e db y t h ed i f f e r e nc ef i l t e r i n g m e t h o da n da u t o m a t i c a l l y ad de d p o i n t s,a l ls t r a i g h tl i n e s a r e s o r t e d u s i n g t h e b o u n d a r y p o i n t c o o r d i n a t e s a n d t h e t h e o r e t i c a lc o o rd i n a te s of t h e d e a d l igh t s p o si t i o n t o c o m p l e t e t h e p o s i t i o n i n g a n ds o r t i n g o f a l l t h e l i g h t so n t h ed i s p l a y s c re e n.F i n a l l y,t h e c a l c u l a t i o nm e t h o dof t h eb r igh t n e s su ni f o r m i t y o f t h eL E Dd i s p l a y i s i nGt r o d u c e d,a n d t h e a c c u r a c y o f t h e p o s i t i o n i n g a n d s o r t i n g r e s u l t s o f t h e l a m pp o i n t s i s v e r i f i e d t h r o u g h t h e b r i g h t n e s s c o r r e c t i o n e x p e r i m e n t.E x p e r i m e n t a l r e s u l t s s h o wt h a t t h e b r i g h t n e s s u n i f o r m i t y o f t h e d i s p l a y s c r e e nb e f o r ec o r r e c t i o n i s73.7%,a n dt h eb r i g h t n e s su n i f o r m i t y o f t h ed i s p l a y s c r e e na f t e r c o r r e c t i o n i s i n c r e a s e d t o98.7%.T h e b r i g h t n e s s u n i f o r m i t y o f t h e d i s p l a y s c r e e n h a s r e a c h e d t h e r a n g e a c c e p t a b l e t o t h e h u m a n e y e,t h e c o r r e c t i o n e f f e c t i s b e t t e r,a n d t h e l a m p p o i n t p o s i t i o n i n g a n d s o r t i n g a c c u r a c y i s h i g h e r.K e y w o r d s:L E Dd i s p l a y s c r e e n;l i g h t p o i n t p o s i t i o n i n g a n ds o r t i n g;a u t o m a t i c c o m p e n s a t i o no f d e a d l i g h t p o s i t i o n;b r i g h t n e s s u n i f o r m i t y c o r r e c t i o n1㊀引㊀㊀言㊀㊀L E D(L i g h tE m i t t e dD i o d e)显示屏由于其尺寸灵活㊁亮度高㊁寿命长㊁视角大等优点,在展会㊁商场㊁影院㊁地铁㊁演播室㊁医院等场所被广泛地应用[1G4].但由于L E D经过长期使用后发光元件和驱动元件老化[5]㊁模块和箱体存在安装误差等因素,会对亮色度均匀性造成影响[6],所以需要对显示屏进行校正处理[7].而校正过程中图像上灯点定位排序的精度将直接影响最终校正的效果.传统的亮色度检测方法同一时间只能检测一个点,对于L E D显示器百万级像素点检测来说效率低下[8].而采用C C D(C h a r g eC o u p l e dD e v i c e)面阵检测器单次测量的像素点数量很大,在相同时间内,检测效率大幅提高[9].L E D显示屏内部的灯点分布存在一定的规律性,但是通过相机拍摄出来的图像由于畸变㊁图像倾斜等原因并不能保证图像中灯点严格按照理想的棋盘格形状分布.而且在L E D显示屏中会出现某些灯珠不能点亮,即死灯的情况,给灯点的定位造成极大的干扰.针对这种情况国内外相关学者通过对二值图像进行水平和垂直投影,确定灯点位置[10G11].本文利用机器视觉检测技术来测量L E D显示屏亮度[12G13],通过对图像中所有灯点的4个角点进行预定位㊁对4条边界点按照直线方程归类排序㊁对死灯位置自动补点㊁反馈角点和边界点死灯处的理论坐标㊁对所有直线进行归类排序完成显示屏所有灯点的定位排序.在提高了亮度采集效率的同时,补充了死灯位置的坐标,为生成系数矩阵及亮色度校正提供了更精确的灯点坐标.2㊀L E D灯点中心坐标提取L E D亮度校正的前提是找到图像上的灯点与显示屏灯点之间位置的一一对应关系,所以在校正前要确定图像中各个灯点的中心坐标,然后将所有坐标按照实际显示屏的灯点排列顺序进行坐标重排.在确定灯点的具体位置之前,先要对采集到的图像进行灰度分布统计,在所获取的感光图像中,由于灯点一般由矩阵的方式排列,且灯点区域与背景区域的灰度值存在明显的差异,有时还会产生环绕光的现象[14].因此需对图像进行二值化处理[15G16].首先将拍摄图像转化为灰度图像,在灰度图像中的非图像点区域提取部分像素灰度值的平均值.然后以二倍非图像点区域灰度值的平均值为阈值,将灰度图像中小于阈值的像素灰度值赋值为0,大于阈值的像素灰度值赋值为1.由于灯点位置像素灰度值较高,高于阈值的点分布密集且分布形状趋近于圆形,所以将灰度值高于阈值且密度较高的区域取该区域的中心为灯点坐标,完成灯点中心坐标的提取.3㊀L E D灯点定位排序由于拍摄过程中存在图像坐标系与像素坐标系的坐标轴线不能保证平行的情况,在灯点较多㊁倾斜角度较大的情况下,会出现坐标排序错误.因此本文针对由图像倾斜导致排序混乱的问题给出675㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第36卷㊀. All Rights Reserved.了一种L E D 灯点精准排序的算法(本文仅校正由于相机和L E D 显示屏没有对准导致图像在一定范围内倾斜的情况,如果倾斜非常严重可能出现校正失败,此时则需要调整相机重新获取图片).因为图像中所有灯点的坐标由于镜头畸变㊁相机倾斜㊁定位误差等因素并不是严格按照规律排列的,但总体排列形状趋向于棋盘格点型分布,因此本文的定位排序算法总体思路为先确定4个角点坐标,再根据斜率分别将所有点归类到各条直线上并排序.3.1㊀角点坐标预定位在以图像左上角为坐标原点的像素坐标系下,无论是镜头畸变㊁相机倾斜还是其他因素导致拍摄图像的L E D 灯点不能严格按照规律排列,其拍摄所得图像的左上角和右下角顶点分别为到坐标原点的最近点和最远点(图1(a ),1(b)).但是图1㊀屏幕顺时针偏移(a )和逆时针偏移(b)时定位距离原点最远和最近的两点F i g.1㊀T w o p o i n t s l e c a t e d f u r t h e s t a n d c l o s e s t t o t h e o r i g i nw h i l et h es c r e e nb e i n g s h i f tc l o c k w i s e (a )a n d c o a n c l o c kw i s e (b)经过大量实验发现,如果位于4个角点的L E D 灯珠出现死灯的情况,则无法完成角点定位.因此本文在定位排序的基础上将死灯所在位置按照周围点坐标排列规律进行了自动补点.首先设原点坐标为O 0,0(),坐标轴横向为X 轴,向右为正方向;纵向为Y 轴,向下为正方向,计算所有点坐标到坐标原点之间的距离,并取极小值所在点设为X i Y i ,极大值所在点设为X a Y a 分别作为图像左上角和右下角的定位点.然后找出所有点中最大的Y 值设为Y m a x ,找出所有点中Y 值小于Y m a x -3l 的点(l 为两个连续点之间的理想距离),如图2(a )所示.将图2(a )中框选的点按照X 从小到大排列并选取框内X 值与最小X 值的绝对值小于l /2的点,筛选结果如图2(b )所示.最后再从小框中选取Y 值最大的点即为左下角顶点,并将此点设为X i Y a.图2㊀初步筛选左下角顶点(a )和精确定位左下角顶点(b)F i g .2㊀P r e l i m i n a r y s c r e e n i n g of t h e l o w e r l e f t v e r t e x (a )a n d p r e c i s e p o s i t i o n i ng of t h e l o w e r l e f t v e r t e x (b )775第4期㊀㊀㊀㊀㊀㊀㊀徐子程,等:L E D 显示屏灯点定位排序法及应用. All Rights Reserved.同理可证,找出所有点中最大的X 值设为X m a x ,并找出所有点中X 值小于X m a x -3l 的点,如图3(a )所示.将图3(a )中框选的点按照Y 从小到大排列并选取框内Y 值与最小Y 值的绝对值小于l /2的点,筛选结果如图3(b)所示.最后再从小框中选取X 值最大的点即为右上角顶点,并将此点设为X a Y i ,至此通过二向排序,完成另外两个角点的定位.图3㊀初步筛选右上角顶点(a )和精确定位右上角顶点(b)F i g .3㊀P r e l i m i n a r y s c r e e n i n g o f t h e t o p r i gh tv e r t e x (a )a n d p r e c i s e p o s i t i o n i n g o ft h et o p r i gh t v e r t e x (b )以上是在4个角的顶点不是死灯的情况下进行的初步定位,如果在4个角点处出现死灯则需进一步进行补点并重新定位.首先将初步定位的4个角点相邻之间两两连线,得到4条直线并分别设为D 1㊁D 2㊁D 3㊁D 4(图4),得出理论上图像点最外围4条边的直线方程的参数.k 1=y X a Y i -y X i Y i ()/x X a Y i -x X i Y i (),(1)b 1=y X a Y i -k 1x X a Y i ,(2)㊀k 2=y X a Y a -y X i Y a ()/x X a Y a -x X i Y a (),(3)b 2=y X a Y a -k 2x X a Y a ,(4)k 3=y X i Y a -y X i Y i ()/x X i Y a -x X i Y i (),(5)b 3=y X i Y a -k 3x X i Y a ,(6)k 4=y X a Y a -y X i Y a ()/x X a Y a -x X i Y a (),(7)b 4=y X a Y a -k 4x X a Y a .(8)图4㊀无死灯情况下定位4条直线F i g .4㊀P o s i t i o n i n g f o u r s t r a i g h t l i n e sw i t h o u t d e a d l i gh t s 然后根据公式(9)分别计算所有点到4条直线之间的距离:d =k x -y +bk 2+-1()2,(9)当x X a Y i =x X i Y i ,或x X a Y a =x X i Y a 时,k 值不存在,所以此时用公式(10)和(11)计算点到直线之间的距离:d =x X i Y i -x ,(10)d =x X a Y a -x ,(11)将点到直线距离小于l /2的点分别归类到4条边线上,然后将属于D 1㊁D 2两条边的点按照X 值从小到大排列,将属于D 3㊁D 4两条边的点按照Y值从小到大排列,完成线性归类排序,并得出每条边上点的数量m 1㊁m 2㊁m 3㊁m 4.由于图像点行列数已知,并设为p 行q 列,且每条直线所属点个数也可以通过计算获得,所以通过对比图像点真实行列数与计算行列数是否相等可知角点处是否为死灯.但实际情况中4条边界线上也有可能出现死灯的情况,所以我们先计算边线上的死灯个数.通过公式(9)㊁(10)㊁(11)的筛选可以得到属875㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第36卷㊀. All Rights Reserved.于4条边界线的点坐标,分别以m 1㊁m 2㊁m 3㊁m 4行两列的矩阵形势表示,并将坐标矩阵分别设为A 1㊁A 2㊁A 3㊁A 4,通过A i 的后m i -1行与前m i -1行做差,寻找有多少x 或y 差值大于1.7l 的点来确定每条线上死灯的个数(=1,2,3,4).设:A m i -1=x i 1y i 1x i 2yi 2⋮⋮x i m i -1y i m i -1éëêêêêêùûúúúúú,A m i =x i 2y i 2x i 3y i 3⋮⋮x i m i y i m i éëêêêêêùûúúúúú,则有:B i =A m i -A m i -1,(12)设B 1㊁B 2中第二列有n 1㊁n 2个大于1.7l 的值,B 3㊁B 4中第一列有n 3㊁n 4个大于1.7l 的值,即n 1㊁n 2㊁n 3㊁n 4代表每条边界线上死灯的个数(不包括顶点).由于左上角顶点和右下角顶点是按照顶点到原点距离确定的,如果出现死灯则会分别出现两种情况;而左下角和右上角的点是通过边界排序计算的,所以只会出现一种情况(图5).㊀㊀㊀㊀㊀㊀图5㊀左上角顶点是死灯,预定位顶点为第二行第一列(a )和第一行第二列(b);右上角顶点是死灯,预定位顶点为倒数第二行最后一列(c )和最后一行倒数第二列(d );左下角顶点是死灯(e );右上角顶点是死灯(f).F i g .5㊀T o p l e f t v e r t e x i s ad e a d l a m p ,t h e p r e Gp o s i t i o n i n g ve r t e x i s t h e s e c o n dr o w ,f i r s t c o l u m n (a )a n d t h e f i r s t r o w ,s e c o n d c o l u m n (b );T h e t o p r igh t v e r t e xi s ad e a d l a m p ,t h e p r e Gp o s i t i o n i n g v e r t e x i s t h e l a s t c o l u m no f t h e s e c Go n d t o l a s t r o w (c )a n d t h e s e c o n d t o l a s t c o l u m n i n t h e l a s t r o w (d );T h ev e r t e xo f t h e l o w e r l e f t c o r n e r i s t h e d e a d l i g h t (e );T h e v e r t e xo f t h eu p p e r r i g h t c o r n e r i s t h e d e a d l i gh t (f ).975第4期㊀㊀㊀㊀㊀㊀㊀徐子程,等:L E D 显示屏灯点定位排序法及应用. All Rights Reserved.㊀㊀以图5(a)为例,左上角顶点为死灯,且第二行第一列为到原点最近的点,此时直线D 3上的点个数m 3加上死灯个数n 3加上一个顶点死灯等于图像点总行数p ,直线D 2上的点个数m 2加上死灯个数n 2等于图像点总列数q ,直线D 4上的点个数m 4加上死灯个数n 4等于图像点总行数p .如果满足公式(13)则可以确定左上角顶点为死灯,此时为了后续的定位,需要在顶点处按照点间距和排列顺序补充一个点坐标.p =m 3+n 3+1p =m 4+n 4㊀q =m 2+n 2㊀ìîíïïïï㊀,(13)同理可算出其余5种顶点死灯的坐标,完成角点坐标的定位.3.2㊀灯点排序角点坐标定位完成后,按照公式(3)㊁(4)㊁(7)㊁(8)可以计算出D 3㊁D 4两条直线方程,再按照公式(9)设立阈值将属于直线附近的点归类到直线上并按照X 值大小分别对两条直线排序,若直线中出现死灯则按照规律自动补点.此时获得两个p 行两列的坐标矩阵E 1㊁E2.其中,E 1=x 11y 11x 21y 21⋮⋮x p 1y p 1éëêêêêêùûúúúúú,E 2=x 1q y 1q x 2q y 2q ⋮⋮x p q y p q éëêêêêêùûúúúúú㊀.虽然像素点总体排列接近棋盘格分布,但经过实验发现如果按照某一行的斜率分别赋予每一行,再根据点间距确定直线方程中的参数b 这种方法计算所有行的直线方程,结果会出现误差,所以需要分别对每一行单独计算直线方程.矩阵E 1,E 2中每一行的点是相对应的,所以根据公式(14)㊁(15)可以计算出p 个直线方程.k i =y i q -y i 1()/x i q -xi 1(),i =1 p (),(14)b i =y i q -k i x i q ,i =1 p (),(15)然后根据公式(16)分别计算所有点到每条直线之间的距离:d i =k i x -y +b i /k 2i +-1()2,(16)如果出现斜率不存在的情况则有:d i =x i 1-x,(17)至此将所有点分别归属到每条横向直线上,再将每条直线上的点按照Y 值从小到大排列即完成所有点的正确排序.4㊀亮度校正4.1㊀计算校正系数矩阵L E D 显示屏的每个像素点是由红㊁绿㊁蓝3种颜色的发光二极管组成的,所以需要对每一种颜色的发光二极管进行校正.常见的方法中将亮度最低值作为目标值会导致显示屏校正以后亮度降低严重,影响观看效果.为了获得校正的系数矩阵,本文首先需要获取灯点的亮度值.具体方法为:将显示屏分别显示红㊁绿㊁蓝3种颜色,并将亮度调节至最大,方便C C D 相机采集显示屏图像.对灯点的亮度值提取采用亮度值积分法,即统计灯点的方框内所有像素点值之和,然后将所有灯点的亮度值相加求平均数,将亮度值的平均数乘以0.85得到的亮度作为校正亮度的目标值.确定目标值以后让所有灯点亮度通过一个变换矩阵变为这个目标值以达到亮度一致的目的.最后将目标亮度值与所有灯点的亮度值相除得出系数矩阵:R i =I r c I r i ˑ100%G i =I g c I g i ˑ100%B i =I b cI b iˑ100%ìîíïïïïïïïï,(18)式中R i ㊁G i ㊁B i 分别为红色㊁绿色㊁蓝色的第i 个灯点的校正系数;I r c ㊁I g c ㊁I b c 为3种颜色的目标亮度值;I r i ㊁I g i ㊁I b 为3种颜色第i 灯个点的亮度值.如果存在有灯点的亮度值小于目标亮度值的情况,则该点的校正系数赋值为1.至此可得出每个灯点对应的校正矩阵为R i G i B i []T .4.2㊀检测亮度均匀性亮度均匀性的计算过程如下:(1)在最高灰度级㊁最高亮度级下显示白场.(2)用亮度计测量图6所规定的P 0~P 8各个点的亮度值L 0~L 8,并计算平均值L -.(3)用公式(19)计算各点亮度均匀性P i .L i =1-L i -L-ˑ100%㊀,(19)085㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第36卷㊀. All Rights Reserved.式中i为0~8中任意一点.(4)取(3)中最小值来表示L E D显示屏的亮度均匀性L p .图6㊀亮度均匀性测量点示意图F i g.6㊀S c h e m a t i cd i a g r a m o fb r i g h t n e s su n i f o r m i t ym e a s u r e m e n t p o i n t s5㊀实验结果与分析为了验证本文提出算法的有效性,本文进行了一系列实验.实验选用尺寸为320ˑ180的矩形L E D显示屏进行检测,计算出了所有L E D灯点的位置信息,并根据目标亮度值计算出系数矩阵,对显示屏进行亮度均匀性校正,校正前后显示屏的白场显示效果如图7所示,其中(a)为校正前显示效果,(b)为校正后显示效果.图7㊀校正前(a)和校正后(b)显示屏白场显示效果对比图F i g.7㊀C o m p a r i s o nc h a r to ft h e w h i t ef i e l dd i s p l a ye f f e c to ft h e s c r e e n b e f o r e(a)a n d a f t e r(b)c a l i b r a t i o n㊀㊀对比图7(a)和图7(b),可以看出校正前显示屏存在亮度不一致的块状区域,经过校正后亮度趋于一致.最终经过亮度检测和计算可以得出校正前白场灯点亮度均匀性约为73.7%,而经过校正后白场灯点亮度均匀性约为98.7%.校正前后显示屏为白场和红㊁绿㊁蓝3种基色时测试点亮度值以及亮度均匀性结果如表1㊁表2所示.表1㊀校正前亮度值与亮度均匀性T a b.1㊀B r i g h t n e s s v a l u e a n db r i g h t n e s su n i f o r m i t y b e f o r e c o r r e c t i o n灯点位置白亮度值均匀性/%红亮度值均匀性/%绿亮度值均匀性/%蓝亮度值均匀性/%01549.874.4359.881.0984.273.1214.274.511559.173.7371.077.3982.273.4212.475.521558.873.7367.978.4977.574.0218.072.331465.381.3340.787.4927.180.5205.579.641515.777.2358.081.6956.876.7211.576.051541.775.1357.781.7987.172.8212.275.761535.275.6350.184.2991.972.1208.577.871535.175.6353.883.0986.772.8210.376.881509.877.7362.980.0952.977.2211.576.1185第4期㊀㊀㊀㊀㊀㊀㊀徐子程,等:L E D显示屏灯点定位排序法及应用. All Rights Reserved.表2㊀校正后亮度值与亮度均匀性T a b .2㊀B r i g h t n e s s v a l u e a n db r i g h t n e s su n i f o r m i t y af t e r c o r r e c t i o n 灯点位置白亮度值均匀性/%红亮度值均匀性/%绿亮度值均匀性/%蓝亮度值均匀性/%01233.799.9302.199.9778.799.6170.7100.011230.199.7304.899.2767.899.0168.798.821237.899.7307.298.4775.299.9171.799.431246.499.0305.499.0780.499.4171.699.541247.898.8304.299.4783.899.0171.399.651218.498.7297.498.3767.698.8169.799.561219.798.8296.598.0767.298.9169.399.271233.699.9%299.399.0780.299.4170.299.781241.599.4%304.999.2781.399.3172.698.86㊀结㊀㊀论本文针对L E D 显示屏校正过程中相机拍摄的图像存在一定程度的倾斜问题,提出了灯点定位排序的算法.通过二向排序和归类排序的方法完成了灯点坐标的预定位,然后根据差值检测和周围点坐标对死灯位置进行了补足.最后根据灯点的定位排序对L E D 显示屏进行了亮度校正实验,校正前后显示屏白场的亮度均匀性由73.7%提高至98.7%,达到人眼可接受的范围内,且亮度在可接受的范围内,从而验证了本文提出的灯点定位排序法的准确性.参㊀考㊀文㊀献:[1]㊀张志宏,张莹.L E D 显示屏色彩还原技术[C ]//第三十三届中国(天津)2019I T ㊁网络㊁信息技术㊁电子㊁仪器仪表创新学术会议论文集.天津:天津市电子学会,天津市仪器仪表学会,2019:394G397.Z HA N GZ H ,Z HA N G Y.L E Dd i s p l a y c o l o r r e d u c t i o n t e c h n o l o g y [C ]//P r o c e e d i n g s o f t h e 33r dC h i n a (T i a n Gj i n )2019I T ,N e t w o r k ,I n f o r m a t i o nT e c h n o l o g y ,E l e c t r o n i c s ,a n dI n s t r u m e n t a t i o nI n n o v a t i o nA c a d e m i cC o n Gfe r e n c e .T i a n j i n :T i a n j i n I n s t i t u t e of E l e c t r o n i c s ,T i a n j i n I n s t i t u t e o f I n s t r u m e n t a t i o n ,2019:394G397.(i nC h i n e s e )[2]㊀程萍.演播室L E D 大屏互动系统选型及应用[J ].影视制作,2019,25(6):70G76.C H E N GP .T h es e l e c t i o na n da p p l i c a t i o no f t h es t u d i oL E Dl a r g es c r e e n i n t e r a c t i v es ys t e m [J ].A u d i o &V i d e o P r o d u c t i o n ,2019,25(6):70G76.(i nC h i n e s e )[3]㊀尹景隆,程宏斌,王瑞光,等.基于分段伽马变换的医用L E D 显示控制系统设计[J ].现代电子技术,2019,42(24):20G24.Y I NJL ,C H E N G H B ,WA N G R G ,e t a l .D e s i g no fm e d i c a lL E Dd i s p l a y c o n t r o l s y s t e m b a s e do ns e gm e n t e d g a mm a t r a n s f o r m [J ].M o d e r nE l e c t r o n i c sT e c h n i qu e ,2019,42(24):20G24.(i nC h i n e s e )[4]㊀冯思悦,梁静秋,梁中翥,等.L E D 微阵列投影系统设计[J ].中国光学,2019,12(1):88G96.F E N GSY ,L I A N GJQ ,L I A N GZZ ,e t a l .D e s i g no f p r o j e c t i o n s y s t e mf o r am i c r o GL E Da r r a y [J ].C h i n e s eO pGt i c s ,2019,12(1):88G96.(i nC h i n e s e)[5]㊀张璟,杨艺伟,庄益娈,等.L E D 加速老化测试进展及失效分析[J ].科技创新与应用,2018(20):69G70.Z HA N GJ ,Y A N G Y W ,Z HU A N GYL ,e t a l .L E Da c c e l e r a t e d a g i n g t e s t p r o g r e s s a n d f a i l u r e a n a l ys i s [J ].T e c h Gn o l o g i c a l I n n o v a t i o na n dA p pl i c a t i o n ,2018(20):69G70(i nC h i n e s e )[6]㊀袁胜春,杨城,杨成沛.L E D 显示屏逐点校正应用中几个重要问题的探讨[J ].现代显示,2010,21(5):44G46.285㊀㊀㊀㊀液晶与显示㊀㊀㊀㊀㊀㊀第36卷㊀. All Rights Reserved.Y U A NSC ,Y A N GC ,Y A N GCP .T h e d i s c u s s i o n o f s e v e r a l i m p o r t a n t p r o b l e m s a b o u t t h e a p p l y of t h e c o r r e c t i o n t e c h n o l og y o fL E Dd i s p l a y [J ].A d v a n c e dD i s p l a y ,2010,21(5):44G46.(i nC h i n e s e )[7]㊀谢欢,朱荀,卢俊,等.基于机器视觉的L E D 大屏亮度一致性检测与矫正[J ].南京大学学报(自然科学),2019,55(2):170G179.X I E H ,Z HU X ,L UJ ,e t a l .L E Ds c r e e n s b r i g h t n e s s c o n s i s t e n c y d e t e c t i o n a n d c o r r e c t i o nb a s e d o nm a c h i n e v i s i o n [J ].J o u r n a l o f N a n j i n g U n i v e r s i t y (N a t u r a lS c i e n c e ),2019,55(2):170G179.(i nC h i n e s e )[8]㊀宋新丽,郑喜凤,凌丽清,等.基于灰度直方图的L E D 显示屏亮度均匀性评估方法[J ].液晶与显示,2009,24(1):140G144.S O N G XL ,Z H E N GXF ,L I N GLQ ,e t a l .L u m i n a n c e u n i f o r m i t y e v a l u a t i o n f o r L E Dd i s p l a y p a n e l b a s e d o n g r a y h i s t o g r a m [J ].C h i n e s eJ o u r n a l o f L i q u i dC r y s t a l s a n dD i s p l a ys ,2009,24(1):140G144.(i nC h i n e s e )[9]㊀王克,李志敏,古利超,等.L E D 大屏幕质量检测中的像素点定位方法研究[J ].灯与照明,2012,36(2):56G59.WA N G K ,L I Z M ,G ULC ,e t a l .S t u d y o nL E D l a r g e s c r e e n p i x e l s p o s i t i o n i n g m e t h o d [J ].L i g h t&L i g h t i n g ,2012,36(2):56G59.(i nC h i n e s e)[10]㊀常宇,李志敏,梁军,等.一种全彩L E D 显示屏亮度均匀性快速检测方法[J ].灯与照明,2009,33(4):33G35.C HA N G Y ,L I Z M ,L I A N GJ ,e t a l .Af a s t d e t e c t i o nm e t h o d f o r b r i g h t n e s s u n i f o r m i t y o f f u l l c o l o r L E Dd i s p l a ys c r e e n [J ].L i g h t&L i g h t i n g ,2009,33(4):33G35.(i nC h i n e s e )[11]㊀董文晓.基于C C D 相机测量的L E D 显示屏亮度和色度均匀性算法研究[D ].西安:西安电子科技大学,2012.D O N G W X.T h e b r i g h t n e s s a n dC h r o m a u n i f o r m i t y m e a s u r e m e n t f o rLE Dd i s p l a y s c r e e nu s i n g CC Dc a m e r a [D ].X i a n :X i d i a nU n i v e r s i t y,2012.(i nC h i n e s e )[12]㊀罗勇军,牟同升.基于成像方法L E D 有效辐亮度测量系统设计[J ].光子学报,2013,42(12):1496G1500.L U O YJ ,MU TS .D e s i g no f aw e i g h t e dr a d i a n c eo f t h eL E D m e a s u r i n g s ys t e m [J ].A c t aP h o t o n i c aS i n i c a ,2013,42(12):1496G1500.(i nC h i n e s e)[13]㊀X UP ,Z HO U WJ ,F E IM R.D e t e c t i o nm e t h o d s f o rm i c r o Gc r a c k e dd e f e c t s o f p h o t o v o l t a i cm o d u l e s b a s e do nm a Gc h i n e v i s i o n [C ]//P r o c e e d i n g s o f 2014I E E E 3r d I n t e r n a t i o n a l C o n f e r e n c e o nC l o u dC o m p u t i n g a n d I n t e l l i ge n c e S ys t e m s .S h e n z h e n :I E E E ,2014:610G614.[14]㊀L I A O CC ,H S USP ,C H E N GFC ,e t a l .Ac o s t Ge f f e c t i v e i m a g e Gp r o c e s s i n g a p p r o a c h t o i m p r o v i n gt h e u n i f o r m i Gt y o fL E D p a n e l s [C ]//P r o c e e d i n g s o f 2013I E E E 8t hC o n f e r e n c eo nI n d u s t r i a lE l e c t r o n i c sa n d A p pl i c a t i o n s .M e l b o u r n e :I E E E ,2013:1135G1140.[15]㊀严利民,潘浩,杜斌.全彩L E D 显示屏亮度检测与校正算法[J ].光学技术,2017,43(2):158G161,165.Y A NL M ,P A N H ,D UB .A l g o r i t h mo f b r i g h t n e s s d e t e c t i o n a n d c o r r e c t i o n o n f u l l Gc o l o rL E Dd i s p l a y [J ].O pt i Gc a lT e c h n i qu e ,2017,43(2):158G161,165.(i nC h i n e s e )[16]㊀吕宝林,佟首峰,徐伟,等.基于配准的机载红外非均匀性校正技术应用[J ].中国光学,2020,13(5):1124G1137.L VBL ,T O N GSF ,X U W ,e t a l .N o n Gu n i f o r m i t y c o r r e c t i o no f a i r b o r n e i n f r a r e dd e t e c t i o n s ys t e mb a s e do n i n Gt e r Gf r a m e r e g i s t r a t i o n [J ].C h i n e s eO p t i c s ,2020,13(5):1124G1137.(i nC h i n e s e )作者简介:㊀徐子程(1994-),男,吉林舒兰人,硕士,2020年于长春理工大学获得硕士学位,主要从事图像处理方面的研究.E Gm a i l :583646460@q q.c om ㊀郑喜凤(1965-),女,黑龙江庆安人,博士,研究员,2000年于中国科学院长春光学精密机械与物理研究所所获得博士学位,主要从事信号采集处理,信息显示,图像处理等方面的工作.E Gm a i l :z h e n gx f @c c x i d a .c o m 385第4期㊀㊀㊀㊀㊀㊀㊀徐子程,等:L E D 显示屏灯点定位排序法及应用. All Rights Reserved.。
LED显示屏的“逐点调整”方案
LED显示屏的“逐点调整”方案逐点调整是指在使用LED显示屏时,根据实际需求对每个像素点进行单独调整,以达到更好的显示效果。
逐点调整可以对亮度、颜色和灰度进行调整,使LED显示屏显示出更加真实、清晰、明亮的图像。
逐点调整主要包括以下几个方面的内容:1.亮度调整:在亮度调整中,首先需要对整个显示屏进行均匀性检测,以确定哪些区域的亮度过高或过低。
然后,根据实际情况,对每个像素点的亮度进行调整。
亮度的调整主要是通过调整每个像素点的电流来实现的,可以通过调整亮度表或者亮度调整软件进行。
亮度调整的目的是保持显示屏在不同环境下的适应性,能够在不同的亮度和对比度条件下,正常地显示图像。
2.颜色调整:在颜色调整中,主要是根据实际情况,对每个像素点的三原色(红、绿、蓝)进行调整。
颜色调整的目的是使显示屏能够准确地显示出原图中的颜色。
具体的调整方法可以通过色度表或者颜色调整软件进行。
在调整过程中,需要注意保持每个像素点的颜色一致,避免出现颜色不匹配的情况。
3.灰度调整:在灰度调整中,主要是对每个像素点的灰度进行调整,以保证显示屏的灰度级数准确显示。
灰度调整的目的是使LED显示屏能够显示出更加细腻、自然的灰度图像。
灰度调整可以通过灰度表或者灰度调整软件进行。
在调整过程中,需要注意灰度调整的平滑性,避免出现灰度级数不连贯的情况。
逐点调整方案的实施步骤如下:1.检测:首先需要对整个LED显示屏进行检测,以确定需要调整的像素点。
可以利用专业的检测设备对显示屏进行全面的检测,包括亮度检测、颜色检测和灰度检测。
2.调整:根据检测结果,对每个像素点进行调整。
调整的方法可以根据实际情况选择,可以是手动调整,也可以是利用调整软件进行自动调整。
在调整过程中,需要对每个像素点的调整情况进行记录,以便后续的维护和管理。
3.验证:在所有像素点调整完成后,需要对整个显示屏进行验证,确保调整效果达到预期。
可以利用专业的验证设备对显示屏进行全面的验证,包括亮度验证、颜色验证和灰度验证。
LED显示屏的调试方法
LED显示屏的调试方法一、硬件检查:1.检查电源连接:确保显示屏的电源线正常连接,并插头与电源插座完好无损。
2.检查信号连接:检查显示屏与控制器之间的信号连接,例如DVI、HDMI、VGA等接口连接是否牢固。
3.定位检查:确保显示屏和控制器之间的信号连接正确对应和连接。
4.查看显示屏状态灯:一般情况下,显示屏的电源灯、信号灯和工作灯有显示不同颜色或闪烁等,检查这些指示灯的运行状态是否正常。
二、软件设置:1.控制器设置:进入控制器的设置页面,检查各个参数设置是否正确,例如分辨率、刷新率、亮度、对比度等。
2.驱动程序:确保计算机中有正确的驱动程序,并使用最新版本的驱动程序,以保证与控制器之间的通信稳定。
3.显示设置:在计算机的显示设置中,确保选择了正确的显示屏作为主显示器,并调整分辨率和刷新率以匹配其最佳显示效果。
三、信号测试:1.信号源测试:更换不同的信号源(如电脑、DVD播放机等)连接到显示屏,观察显示效果是否正常。
2.信号线测试:更换不同的信号线(如HDMI线、VGA线等)进行连接,观察显示效果是否正常。
3.信号源设置:在信号源设备的设置中,检查分辨率和刷新率等参数是否与显示屏的要求匹配。
四、显示效果调整:1.亮度调整:根据显示环境的亮度要求,调整显示屏的亮度,以保证图像显示清晰且不过亮或过暗。
2.对比度调整:根据需要,调整显示屏的对比度,以提高图像的清晰度和对比度。
3.色彩调整:通过控制器的设置或显示屏本身的调节按钮,调整颜色和色彩饱和度等,以获得更准确和逼真的图像显示效果。
4.图像位置调整:使用控制器的调整功能,调整图像在显示屏上的位置和大小,以使其适应显示屏的实际尺寸。
五、测试和验证:1.像素测试:通过显示屏测试软件或检查显示屏上的像素点,并确保所有像素都正常工作,没有出现亮或暗的像素。
2.视角测试:从不同的角度观察显示屏,确保图像在各个角度下的可见性和色彩一致性。
3.灰度测试:使用灰度测试图像,观察显示屏在不同灰度级别下的显示效果,以确保其可以正确显示各种色彩和灰度。
LED显示屏测试方法
LED显示屏测试方法1.亮度测试:亮度是显示屏重要的性能指标之一,可以通过专业的亮度测试仪进行测试。
测试时需要设置不同的亮度级别,从最低至最高进行测试,并记录测试数据。
测试结果应当符合产品规格书中的亮度标准,以保证显示屏能够正常显示。
2.色彩测试:色彩对于显示屏来说也是非常重要的,可以通过色彩测试仪进行测试。
测试时需要选择一组常见的颜色,比如红色、绿色、蓝色等,然后使用色彩测试仪测量显示屏输出的颜色的准确性。
测试结果应当与产品规格书中的颜色标准相匹配。
3.温度测试:显示屏在长时间使用过程中会产生热量,因此需要对其进行温度测试,以确保其正常工作。
可以使用红外测温仪进行测试,将测温仪对准显示屏表面,记录显示屏在各个部位的温度。
测试结果应该在规定的温度范围内。
4.视角测试:显示屏的视角决定了在不同方向观看时其显示效果的变化程度。
可以通过视角测试仪进行测试,将视角测试仪放置在显示屏正前方,然后将其从不同的角度移动,记录测试结果。
测试结果应当与产品规格书中的视角标准相匹配。
5.响应时间测试:响应时间是指在输入信号发生变化时,显示屏从开始响应到完全显示变化所需要的时间。
可以通过专业的响应时间测试仪进行测试。
测试时发送不同的信号到显示屏上,并记录相应的响应时间。
测试结果应当符合产品规格书中的响应时间标准。
6.显示均匀性测试:显示屏的显示区域应该是均匀的,不能有明显的色差和亮度差异。
可以通过肉眼观察或者使用均匀度测试仪进行测试。
测试时将均匀度测试仪放置在显示屏正前方,然后观察是否出现明显的不均匀现象。
测试结果应当符合产品规格书中的均匀度标准。
7.像素测试:显示屏的像素应该是正常工作的,不应该有坏点和亮点。
可以通过像素测试仪进行测试,检测显示屏的每个像素点是否正常工作。
测试结果应当符合产品规格书中的像素标准。
综上所述,LED显示屏的测试方法主要包括亮度测试、色彩测试、温度测试、视角测试、响应时间测试、显示均匀性测试和像素测试。
LED显示屏矫正流程
3.明显屏“花”,采用多批次LED的显示屏建议采用“多bin色度校正”。
4.控制校正区域屏体的温度差异,不得超过5℃。
5.校正后箱体位置不得更换,应按照校正编号来拼屏。
八、分区校正,
点击启动自动校正,校正过程中观察软件右侧校正流程,当最后一项保存到数据库完成后,观察屏校正效果,如果屏上有白点为相机内部镜头有污物,请用专用工具擦拭,如没有问题,请将软件指向下一分区,将相机对准下一分区即可,切记不可移动相机,只能左右上下移动相机角度。
五、在一个相机位校正完成前,不要改变相机位置,也不要改变相机焦距,更不许触碰相机三角架,保持数据线连接,禁止拉扯牵拌数据线,防止损坏相机接口,相机接口损坏后就没有校正功能,只能用于拍照,绝对不许人在相机前走动。请保持相机镜头干净无污物,如果要擦拭请用相机镜头专用工具,尤其是镜头内部擦拭,有专用擦拭工具。
四、分辨率点数可以设置接收卡带载参数也可以设置单个模组带载参数,输入接收卡参数既为切割后的数据为单个箱体的系数,输入单个模组参数既为单个模组的系数。
五、编号方式选择手动,方便自己标记。
六、目标数据库选择多个。
七、选择文件路径。
八、开始转换。
备注:
上传校正系数
一、打开NovaLCT控制软件
二、进入高级用户登录
5、进入高级用户登录,点校正按钮,等待与校正软件相配合。
备注:
三、架设相机至高度和距离在适当位置。参考如下:
P0.8-P2.6为4-8M
P2.85-6.94为6-12M
P7.62-P8为8-15M
P8.33-P25为0-31M
P25以上依实际情况定
屏体搭设比较高的屏,高度为人体站立后可正常调试,机为宜,较低的屏为相机对应屏中部即可,误差50CM不影响校正。
一种LED显示屏像素光强均匀性评估方法
一种LED显示屏像素光强均匀性评估方法作者:添加日期:2009年3月31日丁铁夫1,2汪洋1,2(1.中国科学院长春光学精密机械与物理研究所,长春吉林130033)(2.长春希达电子技术有限公司,长春吉林130033)摘要:首先介绍现有LED显示屏的像素光强均匀性测试评估方法,分析该方法存在的问题。
然后提出基于CCD的LED显示屏像素光强信息采集系统的LED显示屏像素光强均匀性评估方法,对通过新方法评估的结果进行分析,最后对本文进行总结。
关键词:LED显示屏,光强均匀性,直方图,均方差1 前言各种显示系统不均匀性的缺陷一般表现为:在显示系统均匀与连续的输入信号时,输出信号出现可见空间不均匀的现象(光强、色度不均匀或二者的结合)。
如CRT显示屏的不均匀通常表现为中间区域较亮边角区域较暗;LCD显示屏的不均匀通常表现为靠近背光源区域较亮,远离背光源区域较暗;LED显示屏的不均匀则表现为屏幕上出现的“麻点”或“马赛克”等现象。
这些现象会严重影响显示屏的显示效果。
其中,在主波长相同的情况下像素光强均匀性对显示屏显示效果的影响起着决定性因素。
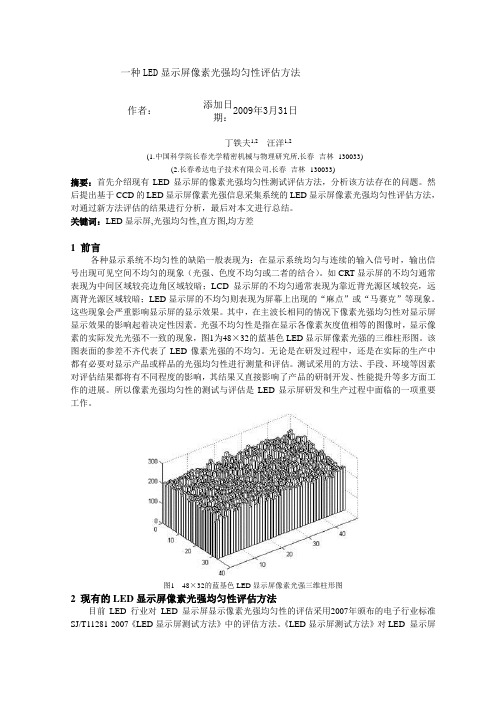
光强不均匀性是指在显示各像素灰度值相等的图像时,显示像素的实际发光光强不一致的现象,图1为48×32的蓝基色LED显示屏像素光强的三维柱形图。
该图表面的参差不齐代表了LED像素光强的不均匀。
无论是在研发过程中,还是在实际的生产中都有必要对显示产品或样品的光强均匀性进行测量和评估。
测试采用的方法、手段、环境等因素对评估结果都将有不同程度的影响,其结果又直接影响了产品的研制开发、性能提升等多方面工作的进展。
所以像素光强均匀性的测试与评估是LED显示屏研发和生产过程中面临的一项重要工作。
图1 48×32的蓝基色LED显示屏像素光强三维柱形图2 现有的LED显示屏像素光强均匀性评估方法目前LED行业对LED显示屏显示像素光强均匀性的评估采用2007年颁布的电子行业标准SJ/T11281-2007《LED显示屏测试方法》中的评估方法。
led显示屏各参数计算方法和相关知识
(1)LED显示屏供电系统的检测;
(2)LED显示屏显示系统的检测、调试;网络系统的调试;多媒体系统的调试。
LED三面翻显示屏的特点
LED三面翻显示屏结合了喷绘广告和LED显示屏的优点取二者之长、避二者之短的广告屏。LED三面翻显示屏带给人们很好的视觉效果,是很好的户外宣传媒介,是一种白天美化夜间亮化LED广告屏;白天作为传统的大型的广告牌,到晚上它将转变成全彩LED显示屏,可显示各种图案、文字、动态视频等;可分条目、分时段播放。
LED三面翻对传动的主动轮及从动轮加装了内镶式金属件,增加了从动部分的韧性,独特的配方使成型材表面更加光滑、耐磨,从而在根本上解决了三面翻设备的故障及画面不平整的问题,高科技的材料、领先的设计、精良的制作工艺是“科美芯”LED三面翻显示屏运转平整,故障率低的绝对保证。
LED显示屏单元板常见故障以及处理的办法
举列说明:一个常用的全彩模组像素为 16*8 (2R1G1B)如果用MBI5026 驱动,模组总共使用的是: 16*8*(2+1+1)=512 ,MBI5026 为 16位芯片,512/16=32
(1)如果用32 个MBI5026芯片,是静态虚拟
(2)如果用16个MBI5026芯片,是动态1/2扫虚拟
(2)确定LED显示屏屏体的安装位置和环境;
(3)确定安装控制主机的机房位置及环境;
(4)测量控制信号、数据信号的实际传输距离。
2、设计传输信号线的布线位置
(1)施工人员依照技术人员勘察之后的设计方案,进行通讯线缆的敷设;
(2)清理布设路线;(含必要的挖掘、打孔等)
(3)埋设线管、穿线;
(4)安装线材连接件。
RGB颜色混合距离三色混合成为单一颜色的距离:led全彩屏视距=像素点间距(mm)×500/1000
led窗口显示屏的像素点距定义
led窗口显示屏的像素点距定义
LED窗口显示屏的像素点距,也称为点间距,是指LED显示屏中每个像素点到相邻像素点之间的中心距离。
这个距离通常以毫米(mm)为单位进行计算。
点间距的大小直接影响到LED显示屏的分辨率和显示效果。
一般来说,点间距越小,像素密度越高,显示效果越清晰。
反之,点间距越大,像素密度越低,显示效果相对较差。
因此,在选择LED窗口显示屏时,需要根据实际需求和观看距离来确定点间距的大小。
常见的LED窗口显示屏点间距类型有P1、P2、P3、P4、P5、P6等,分别对应1mm、2mm、3mm、4mm、5mm、6mm的像素间距。
在实际应用中,需要根据场所环境、观看距离、投资预算以及展示内容等因素来综合考虑选择何种点间距的LED窗口显示屏。
此外,需要注意的是,点间距并不是唯一的决定LED显示屏清晰度的因素,屏幕的亮度、色彩、对比度等因素也会影响到显示效果。
因此,在选择LED窗口显示屏时,需要综合考虑多个因素,以达到最佳的显示效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
在序号 间断的标 记图像进行第 3次扫描标记 , 以恰 当标 记像 素点在显示屏 中的位置. 过失控点 的定位 与标记 通 实验来 验证 改进方法的可靠性.
关键 词 :E L D显示 屏检测 ; 失控点 ;aWi o sC I Lb n w V d 中圈分类号 :P3 14 T 9 . 文献标识码 : A
到大屏幕视频显示器 , 很多显示屏面板集合 了成千
上万个 L D 但 在 显 示 阵 列 中 , L D 的亮 度 一 般 E . 各 E 会有 很 大 差 异 , 同样 驱 动 条件 下 , L D之 间 的亮 各 E 度差 异有 时高 达 l% ~2 % . 5 0 因此 , 高档 L D显 在 E 示屏 投入 使 用之前 , 对整 个屏 幕进 行测试 , 对失 应 并
L D显 示屏 像 素 定 位 与标 记 的 一种 方 法 E
栾 晓明 , 李荣军
( 尔滨工程大 学 信 息与通信工程学院 , 哈 黑龙 江 哈 尔滨 100 ) 5 0 1
摘
要 : L D显示屏像素点的定位与标记过程 中, 在 E 对逐行 标记算 法加 以改进 , 在经 过逐行 扫描 2次后 , 对存
维普资讯
第3 4卷第 3期 20 0 7年 3月
应
用
科
技
Vo . 4. . 13 № 3
Ma . 0 r 2O 7
Ap l d S in e a d T c n lg p i ce c n e h oo y e
文章 编号 :09— 7 X{0 7 0 0 1 10 6 1 20 )3— 05—0 4
1 逐行标记算ቤተ መጻሕፍቲ ባይዱ
逐行标记算法是对图像 中连通像素成分进行标 记的一种算法. 这种算法需要对图像进行 2 次扫描. 第1 次扫描对图像各像素点赋予一个 临时标号 , 并
由并查结 构 动态地 创 建 等 价类 ; 2次 扫 描 用 等价 第 类标 号逐 行 代替第 1次扫 描 所 赋 予 的 临 时标 号 . 其 中, 等价 类 是指输 入 域 的子 集 合 . 该 子 集合 中 , 在 对 各 个输 入 数据 的某 种 特性 来 讲 都 是 等 效 的 . 逐 行 在
Ab ta t I e p o e so t e lc t g a d lb l g p x l i e L a e , n i r v d lb l g me o a e n s r c : n t rc s f ai n e i ie s n t ED p l a h h o n a n h n mp o e e i t d b s d o a n h i - y l e s a n n lo t i r p s d i r e l e o t i es i a lp e y l e b - n c n i g ag r m s p o o e n o d rt b l d l ae t e p x l n t e p e r p r .T e t i n i i h o a n a c h h n o l h r h d lb l g i x c td t e ra g e i d x o e p x l h c a e b e a e e i e b e l e b ・ n b l g a e n s e e u e o ra r n e t e ft i es w i h h v e n lb l d t c y t i ・ y・ e l e n i h n h w h n ・ l i a i ag r m.T e r l b l y o t i a e i g me o se y e p r n s o l ai g a d l e ig s me o to - o - loi h t h i i t h s lb l t d i t td b x e me t o t a l o u -fc n e a i f n h se i f c n n b n t l onsi e p e. o p r i t n t a 1 h n Ke wo d : D p e ee t n;o to - o to on ;L b i d ws C I y r s L a ld t ci E n o u -fc n r lp it a W n o V
A e h d fl c t n a e i g p x l n t e LED a e m t o o a i a d lb l i esi o ng n h p nl
L A i —lg L ogjn U N Xa ni , I n - o n R u
( ol eo f mao dC m u iao n er g Ha i nier gU i ri , abn100 , hn ) C lg fno t na o m nct nE n i , r nE g e n n esy H ri 5 0 1 C ia e I r i n i c n b n i v t
发 光二 极管 ( D) 示屏 在各 种终 端设 备 中 已 E L 显 经被广 泛使 用 . 交 通信 号 灯 、 字 显 示 器 、 告 牌 从 文 广
过 程 中 , 此 为基 础 , 以构 建 显 示 屏 L D 参数 自 以 可 E 动测试 及调 整 系统 . 对 于实现 高效 检 测 L D显示 这 E 屏 的技 术指 标 , 提高 显示屏 质 量 , 变 目前低 效 的 目 改 测 方式 具 有非 常现 实 的积 极 意义 .