利用rltool工具设计系统
根轨迹,频率分析
(a)
(b)
该命令将打开rltool工具的界面,显示原开环模型的根轨迹图,如图 (a)所示。单击该图形菜单命令Analysis中的Response to Step Command 复选框,则将打开一个新的窗口,绘制系统的闭环阶跃响 应曲线,如图(b)所示。可见这样直接得出的系统有很强的振荡, 就需要给这个对象模型设计一个控制器来改善系统的闭环性能。
线性系统的根轨迹
根轨迹是指系统的某一参数从零变到无穷大时,特征方程的 根在s平面上的变化轨迹。这个参数一般选为开环系统的增益K。 用MATLAB可以方便地绘制精确的根轨迹图,并可观测参数变化 对特征根位置的影响。 假设系统的对象模型可以表示为
b1 s m + b2 s m−1 + ⋯ + bm s + bm+1 G ( s ) = KG0 ( s ) = K n s + a1 s n−1 + ⋯ + bn−1 s + an
练习:请绘制下面系统的根轨迹曲线
K G (s) = 2 2 s ( s + 2 s + 2)( s + 6 s + 13)
K (0.05 + 1) G (s) = 2 s (0.0714 s + 1)(0.012 s + 0.1s + 1)
线性系统的频域分析 频域分析法是应用频域特性研究控制系统的一种经典方法。 它是通过研究系统对正弦信号下的稳态和动态响应特性来分 析系统的。采用这种方法可直观的表达出系统的频率特性, 分析方法比较简单,物理概念明确。
2)Bode图的绘制与分析 对数坐标图 ) 图的绘制与分析(对数坐标图 图的绘制与分析 对数坐标图)
系统的Bode图又称为系统频率特性的对数坐标图 对数坐标图。Bode 对数坐标图 图有两张图,分别绘制开环频率特性的幅值和相位与角频率 ω 的关系曲线,称为对数幅频特性曲线 对数相频特性曲线 对数幅频特性曲线和对数相频特性曲线 对数幅频特性曲线 对数相频特性曲线。 MATLAB中绘制系统Bode图的函数调用格式为: bode(num,den) 频率响应w的范围由软件自动设定 bode(num,den,w) 频率响应w的范围由人工设定 [mag,phase,w]=bode(num,den,w) 指定幅值范围和相角范 围的伯德图
控制系统MATLAB仿真2-根轨迹仿真
Gk ( s)
k g ( s 0.5) s( s 1)( s 2)( s 5)
绘制系统的根轨迹,确定当系统稳定时,参数kg 的取值范围。 num=[1 0.5]; den=conv([1 3 2],[1 5 0]); G=tf(num,den); K=0:0.05:200; rlocus(G,K) [K,POLES]= rlocfind(G) figure(2) Kg=95; t=0:0.05:10; G0=feedback(tf(Kg*num,den),1); step(G0,t)
Root Locus 8
8 6 4 2 0 -2 -4 -6 -8 -8 x x x
6
4
2
Imaginary Axis
0
-2
-4
-6
-8 -8
-6
-4
-2
0 Real Axis
2
4
6
8
-6
-4
-2
0
2
4
6
8
(a) 直接绘制根轨迹
(b) 返回参数间接绘制根轨迹
图1 例1系统根轨迹
二、MATLAB根轨迹分析实例
用户可以通过Control Architecture窗口进行系 统模型的修改,如图9。
图9 rltool工具Control Architecture窗口
也可通过System Data窗口为不同环节导入已 有模型,如图10。
图10 rltool工具System Data窗口
可以通过Compensator Editor的快捷菜单进行 校正环节参数的修改,如增加或删除零极点、 增加超前或滞后校正环节等,如图11。
Step Response 2 1.8 1.6 1.4 1.2
基于RT—Linux的开放式五轴联动电火花加工数控系统及其在带冠涡轮盘加工中的应用

(1 ej g I siueo e tomahn n B in 0 1, ia .B in n t t fEl r — c iig, ej g 1 9 Chn ; i t c i 0 1
理 等任务 都属 于实 时任务 的范 畴 。非实 时任务 对任
务实 时性 的要 求不 高 , 只要 保证 在 某 一 时 间 间 隔 内
能处 理 即可 。如 : 系统 加 工 的辅 助工 作 和 系 统管 理
到驱 动单元 去驱 动 电机 的运 动 。同时也 要控 制 电源
和机床 的其 他参 数 , 实 时完 成 状 态监 测 和 状 态显 并 示 。该 软件 结构模 块 化强 、 次 和调用 关系 清楚 。 层
tm e u b n l k i x e i e t l e o v ld t h e f r a t ft e s se , he s s e s r a— i d t r i e b i s e p rm n ai d t ai a e t e p ro m n e o h y t m t y t m i e l s z tm e,sa l n eib e. i t b e a d r la l Ke r s:fvea i ; y wo d i — x s EDM ; CN C y t m ; sse RT— n x; e t iti u in t c oo y Li u v cord srb to e hn lg
处理 等 ) 。周期 任务 主要 是 指 在加 工 控 制 过程 中 的
自己动手定制winpedos工具箱MiniLinuxU盘启动盘

自己动手定制winpe+dos工具箱+Mini LinuxU盘启动盘启动技术2008-05-09 20:40:08 阅读7215评论7字号:大中小自己动手定制winpe+各类dos工具箱U盘启动盘+minili nuxby ncfore st: http://ncfore /原文地址:http://ncfore /blog/static/295626642008498408579/由于一个64M老U盘,没什么用,拿来发挥余热。
如果U盘够大,可以使用功能更强大的m ini linux和带更多工具的winp e。
这次安装了w inpe+maxdos v6plu x+矮人dos5.3+cdlinu x0.4.9+mclinu x2.02+bomber linux3.7,工具应该算比较多了。
思路很多:法1:可以先做成d os启动盘,这样直接加载各类dos工具,然后再用gr ub4do s加载wi npe。
法2:可以做成nt loade r,启动winp e,再在boot.ini中写入加载dos工具的语句。
法3:用grub引导各类工具,包括winp e和各类工具箱。
由于觉得gr ub引导功能强大(各大linu x发行版都用它做引导器),因此决定用第三种方法。
首先准备工具:1、惠普优盘格式化工具HP USBFW.EXE,或者usbo ot或者其它格式化U盘的工具。
2、winpe,我用的是64M的U盘,故使用了mi ni winpe,使用的是老毛桃修改的m iniwi npe 070911版:thunde r://QUFodH RwOi8vd3d3LnF1a WNrOC5jbi9kb3du LmFzc D9pZD0xNTM mc2lk PTBaW g==如果你使用的U盘比较大,可以下载其它的集成了较多工具的w inpe。
华电MATLAB课程设计2011

MATLAB入门 MATLAB入门
一、启动MATLAB 启动MATLAB 二、MATLAB程序设计基础 MATLAB程序设计基础 三、SIMULINK动态仿真集成环境 SIMULINK动态仿真集成环境
启动MATLAB 启动MATLAB
当装好MATLAB 后 双击MATLAB MATLAB图标进 当装好 MATLAB后 , 双击 MATLAB 图标进 MATLAB 或单击Windows的开始菜单,依次指向“ Windows的开始菜单 入 , 或单击 Windows的开始菜单 , 依次指向 “ 程 MATLAB”即可进入 MATLAB的命令窗 即可进入MATLAB 序 ” 、 “ MATLAB 即可进入 MATLAB 的命令窗 它是用户使用MATLAB进行工作的窗口, MATLAB进行工作的窗口 口,它是用户使用 MATLAB进行工作的窗口, 同 时也是实现MATLAB各种功能的窗口。 MATLAB各种功能的窗口 时也是实现MATLAB各种功能的窗口。MATLAB 命令窗口除了能够直接输入命令和文本, 命令窗口除了能够直接输入命令和文本 , 还包括 菜单命令和工具栏。MATLAB的菜单命令构成相 菜单命令和工具栏 。MATLAB的菜单命令构成相 对简单而全面。 对简单而全面。
时域分析法
时域分析法是一种直接准确的分析方法,易 为人们所接受,它可以接受系统时域内的全部信 息。时域分析法包括稳定性分析、稳态性能分析 (稳态误差)、动态性能分析三大方面。在 MATLAB软件中稳定性能的分析可以直接求出特 征根或用古尔维茨判据判定稳定性,而稳态误差 的求取可根据静态误差系数,利用求极限的方法 求取(与手算类似不再考虑),也可从输出中直 接看出。第三方面动态性能主要是根据系统的各 种响应来分析的,所以要学习一下在MATLAB软 件中如何获取各种响应的命令函数。
MATLAB的根轨迹仿真实验设计思路及作用分析
MATLAB的根轨迹仿真实验设计思路及作用分析控制系统的根轨迹分析与设计是自动控制理论中非常重要的一种方法,也是在工程实际中得到广泛应用的一种图解方法,在自动控制原理课程教学中占有重要地位。
传统的根轨迹实验需要手工绘制系统的根轨迹图以及大量的计算,效率低,且很难得到精确的结果[1];而MATLAB中提供了绘制和分析根轨迹的函数,可以非常方便、直观的得到系统的根轨迹,因此,我们将MATLAB引入到自动控制原理实验教学中,设计基于MATLAB的根轨迹仿真实验。
1 根轨迹仿真实验设计根轨迹仿真实验不但要求学生掌握绘制根轨迹的方法,而且能够根据根轨迹图分析系统的性能,更进一步地,当系统性能不满足要求时,能够正确设计校正装置,改善系统的性能。
因此,仿真实验由绘制根轨迹、性能分析和系统校正三部分组成。
(1)绘制根轨迹。
MATLAB中提供了rlocus()函数,可直接用于控制系统根轨迹的绘制,调用格式rlocus(num,den),其中num为系统的开环传递函数分子多项式的系数向量,den为系统的开环传递函数分母多项式的系数向量,多项式各项按s的降幂排列。
在绘制的根轨迹图上,用鼠标左键单击曲线上的任一点,将显示关于这个点的有关信息,包括该点的增益值,对应的系统特征根的值和可能的闭环系统阻尼比和超调量等[2]。
在MATLAB中,提供了rlocfind()函数用于获取选定点对应的闭环极点和增益K的值。
该函数的调用格式为:[k,r]=rlocfind (num,den)。
根轨迹绘制完成,执行rlocfind命令时,出现“Select a point in the graphics window”的提示语,即要求在根轨迹图上选定一个点,根轨迹图上出现“+”标记,将鼠标移至根轨迹图上的选定位置,然后单击左键确定,就得到了选定点的闭环根r和增益K的返回变量值[3]。
(2)性能分析。
系统的性能分析主要是稳定性、动态性能和稳态误差三个方面。
L002004028-regtool工具使用实验

学习使用regtool工具学生单击“试验环境试验”按钮,单击“打开控制台”按钮,然后输入密码123456,进入目标主机,如图所示:4八ethQ实验步骤L002004028xp01_1实验内容点击进入目录,如教材图2所示0 tools文件⑺ 编$H (E)查看(V)收SSCAI IMCT)帮助00,_y D:\tools n 创逢_个新文件夹 0将这个文件夹发布到 7 共wtwtx具它位直尖本地磁空6:) 我的文君 共享文驾 我的电脑 网上邻需详鋼信息1于祸F 开始,c e§• tools图2解压,并运行regtool.exe 程序,如教材图3所示,点击“系统启动项”选项卡,可以更改系统启动选项。
文件和文井夹任务 retoolJ225 1,180 B3常退-搜京 文件夹» re A tool夏件On 编辑⑹葺看⑴友就如I ••具Cr :帮助叫0后退*也址11二系毓启动项DLLJffi 件模块I 映像故持I 文件矢联I 蛊址服务I 内谀腿或服务厂显示特殊启动项描述注册1X 注册表修复工具立斤和左 列重命.曲移动:门宣制題以电 丄立仲名称命专或描述11 口八!*' 亡 tfiioii. eaceC : \TINDOIS\systeim321 ctfmon. exeC:\II□□iHJFMICS. 1X ; IWIWDOWS* ・INIE\imjp3」\IMJPMIG ・ EXE A /S ・. (JAII □■剧 FJU M E2W2ASyiK C: \TIHDOIS \ 5YS t vn32 辽冊\TrNTLGHT\TDTTSE ・・ C;\II□ A PHIME2O0eA C:\nHD0WS\iystwn32nME\TIHTLGHT\TIWTSE... C:\II□ "IlfflSCMi?C:\IRDGRA A MOirL\MICROS A l\IfnE\IMSC41... CAfFCADc1 Idesktop, mi C: \I «cumcnt.3 axid S e t li. ngsi xi.l st-ra-t "'■・・・C:\Bc4* desktop, iniC : VllocumentE and SettingsYAll IfsersV 1• •••孕的¥的上・re我共我网详细信目Sv re A tQiGl点击“ DLL插件模块”,可以对系统插件进行更改,如教材图4所示M regtool立件創漏辑⑴萱看收藏帮助駆文件和主 茸它位音 碰注册表列重命. 必移动t0复制述注工具宜 ia m-J 文件 x 删除•二 I 吟t □我的已 共聖J 我的•」网上席开始至统启动项7丄I |!" ] aryp t32 chain□勺 cr )f ptnet 圏 □ cscdll □ IjJ dinuntfy| | _A ScC«rtProp □勺 Schedule 口 £ cclEntfy口 也 S AnsLogn□色1~~1— t-ernarv」也 wlbilltJMlJ {AEB6717E-7E19-...*块:|迪侵劲持1立悴笑朕I 累筠聃曹I 內遞砸动服冬II 命令或§齟cryvtSE. dll ・crypt 加"dll cscdll.ai US 严 twRflo<%VSy¥dimsntfy dllvrlnoti fy ・ dll ■fflno t i fy_ dll ・i743CAulC:\TI 匚:诵」枫沖TSSC2-ABEA ■… 匚世(5CT451EF-2B13-...n ,|_ 忖月几9F431-2A2E-.. I r« > LD PQ iRm i ndarICTBurn□ jw^bChtck C 也毎曲 □也 CL ass Install H ・・「□ ■ ' I deflate □ L I AiPSv regtqolmo tify. dll wlnfltify dll dllYfin'ti tify dllUBL 执厅挂&ows™预加毂桎号組件类別鞍存程序IEFXZrV/ c.A l CAM cAulCWmCWm|76«59C« 4G<* 4G&♦-£W3T-*£*30(M£31 *9} I... {Fl^«b8»05-b ^e442-804*-409d6 JR 515rf} I... {ESF35120-M3S-11CF-9C8T- a0AW05127ED} I.殊海的錨诩器個-S2E22O5£4I53] \...AF lzd3it ・ 1 encoding/dec?din; Filter AF Izd A tiBl encoding/dac A dii ng Filltr保存全部虐挥X 注册表修复工具点击“映像劫持",可以对映像劫持进行更改,如教材图5所示CAU CATI C:WI C:\nlCWmC;\IF c\ix C:\TICWnCAMC怖n点击“文件尖联”,可以对文件矢联进行更改,如教材图6所示Fl 文件关联I 系纭服务 内絃驱动服务I 地址00 ]吕系统启动顶I DLLJS 件欖块『映藥幷" 文件和攻其r J '0a 2J *描述:注册表«Jf.己劫捋 I 劫持为 □凹"寸 Image F:le•・・ ntsd -dLXftKSC:\WIHDOYS\syst保存 I 靈新扫皓I 全部选择」 1■注册表修复工具缶 regtool文件OF)編据(Z)£« (V)收*3)工具⑴ 箱助(X),。
自动控制系统的设计--基于根轨迹的串联校正设计
自动控制系统的设计--基于根轨迹的串联校正设计与频域法相似,利用根轨迹法进行系统的设计也有两种方法:1)常规方法;2)Matlab方法。
Matlab的根轨迹方法允许进行可视化设计,具有操作简单、界面直观、交互性好、设计效率高等优点。
目前常用的Ma tlab设计方法有:1)直接编程法;2)Matlab控制工具箱提供的强大的Rltool工具;3)第三方提供的应用程序,如CTRLLAB等。
本节在给出根轨迹的设计思路的基础上,将重点介绍第一、二种方法。
6.4.1 超前校正关于超前校正装置的用途,在频率校正法中已进行了较详细的叙述,在此不再重复。
利用根轨迹法对系统进行超前校正的基本前提是:假设校正后的控制系统有一对闭环主导极点,这样系统的动态性能就可以近似地用这对主导极点所描述的二阶系统来表征。
因此在设计校正装置之前,必须先把系统时域性能的指标转化为一对希望的闭环主导极点。
通过校正装置的引入,使校正后的系统工作在这对希望的闭环主导极点处,而闭环系统的其它极点或靠近某一个闭环零点,或远离s平面的虚轴,使它们对校正后系统动态性能的影响最小。
是否采用超前校正可以按如下方法进行简单判断:若希望的闭环主导极点位于校正前系统根轨迹的左方时,宜用超前校正,即利用超前校正网络产生的相位超前角,使校正前系统的根轨迹向左倾斜,并通过希望的闭环主导极点。
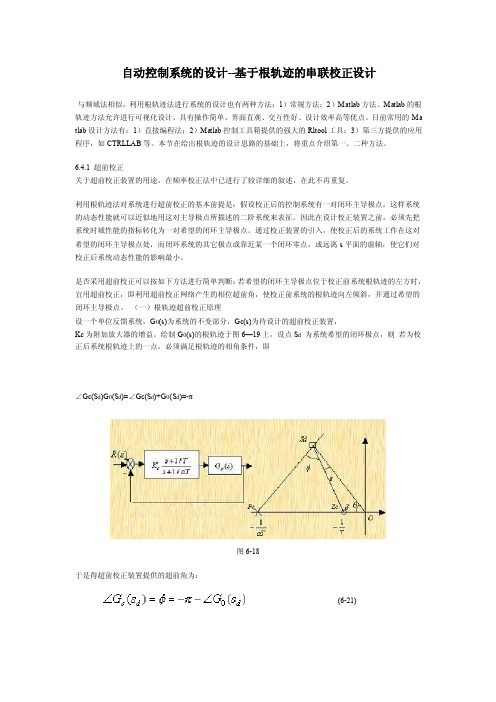
(一)根轨迹超前校正原理设一个单位反馈系统,G0(s)为系统的不变部分,Gc(s)为待设计的超前校正装置,Kc为附加放大器的增益。
绘制G0(s)的根轨迹于图6—19上,设点S d为系统希望的闭环极点,则若为校正后系统根轨迹上的一点,必须满足根轨迹的相角条件,即∠Gc(S d)G0(S d)=∠Gc(S d)+G0(S d)=-π图6-18于是得超前校正装置提供的超前角为:(6-21)显然在S d已知的情况下,这样的Gc(s)是存在的,但它的零点和极点的组合并不唯一,这相当于张开一定角度的剪刀,以S d为中心在摆动。