最新自动控制原理概念及定义
考研自动控制原理
考研自动控制原理自动控制原理是控制理论的基础,是现代科学技术中的一门重要学科。
它研究有关系统在给定条件下自动实现某种特定控制要求的方法和技术,广泛应用于各个领域,如机械、电子、通信、航空等。
本文将从自动控制原理的基本概念、主要方法和应用实例三个方面进行探讨。
一、自动控制原理的基本概念1. 控制系统控制系统是由一组元件组成的,能够对某个过程或系统进行控制的网络。
它由输入、输出、控制器和被控对象组成,输入是控制系统接收的命令或指令,输出是控制系统产生的相应响应,控制器是控制系统的核心,用于生成控制信号,而被控对象是受控制的物理对象或过程。
2. 反馈反馈是控制系统中的一种重要机制,它通过测量控制对象的输出来调整控制器的输入,以实现对控制对象的精确控制。
反馈机制可以分为正反馈和负反馈两种形式,其中负反馈是应用最广泛的一种,可以实现对系统输出误差的校正。
3. 控制系统性能指标性能指标是用于评价控制系统性能好坏的定量指标。
常见的性能指标包括稳态误差、超调量、响应时间等,通过对这些指标的分析和优化可以提高控制系统的稳定性和动态性能。
二、自动控制原理的主要方法1. 传递函数法传递函数法是一种常用的分析和设计控制系统的方法。
通过建立系统输入和输出之间的传递函数,可以研究系统的频率响应、稳定性和性能等问题。
传递函数法在上世纪40年代被提出,至今仍然被广泛应用。
2. 状态空间法状态空间法是一种用状态变量描述系统动态行为的方法。
通过将系统转化为状态方程,可以研究系统的稳定性、可控性、可观性等性质。
状态空间法在控制系统设计中具有重要的理论和实际意义。
3. 根轨迹法根轨迹法是一种用图形分析法研究系统稳定性和性能的方法。
通过对极点和零点的变化轨迹进行分析,可以判断系统的稳定性,并通过调整系统参数来改善系统的性能。
三、自动控制原理的应用实例1. 温度控制系统温度控制系统是自动控制原理在实际应用中的典型例子。
通过传感器感知环境温度,并通过控制器对加热或制冷装置进行控制,实现对温度的精确控制。
自动控制原理知识点总结
自动控制原理知识点总结自动控制原理是一门研究自动控制系统的分析与设计的学科,它对于理解和实现各种工程系统的自动化控制具有重要意义。
以下是对自动控制原理中一些关键知识点的总结。
一、控制系统的基本概念控制系统由控制对象、控制器和反馈通路组成。
控制的目的是使系统的输出按照期望的方式变化。
开环控制系统没有反馈环节,输出不受控制,精度较低;闭环控制系统通过反馈将输出与期望的输入进行比较,从而实现更精确的控制。
二、控制系统的数学模型数学模型是描述系统动态特性的工具,常见的有微分方程、传递函数和状态空间表达式。
微分方程是最直接的描述方式,但求解较为复杂。
传递函数适用于线性定常系统,将输入与输出的关系以代数形式表示,便于分析系统的稳定性和性能。
状态空间表达式则能更全面地反映系统内部状态的变化。
三、时域分析在时域中,系统的性能可以通过单位阶跃响应来评估。
重要的性能指标包括上升时间、峰值时间、调节时间和超调量。
一阶系统的响应具有简单的形式,其时间常数决定了系统的响应速度。
二阶系统的性能与阻尼比和无阻尼自然频率有关,不同的阻尼比会导致不同的响应曲线。
四、根轨迹法根轨迹是指系统开环增益变化时,闭环极点在复平面上的轨迹。
通过绘制根轨迹,可以直观地分析系统的稳定性和动态性能。
根轨迹的绘制遵循一定的规则,如根轨迹的起点和终点、实轴上的根轨迹段等。
根据根轨迹,可以确定使系统稳定的开环增益范围。
五、频域分析频域分析使用频率特性来描述系统的性能。
波特图是常用的工具,包括幅频特性和相频特性。
通过波特图,可以评估系统的稳定性、带宽和相位裕度等。
奈奎斯特稳定判据是频域中判断系统稳定性的重要方法。
六、控制系统的校正为了改善系统的性能,需要进行校正。
校正装置可以是串联校正、反馈校正或前馈校正。
常见的校正方法有超前校正、滞后校正和滞后超前校正。
校正装置的设计需要根据系统的性能要求和原系统的特性来确定。
七、采样控制系统在数字控制系统中,涉及到采样和保持、Z 变换等概念。
自动控制原理概念最全整理
自动控制原理概念最全整理自动控制原理是研究系统和设备自动控制的基本原理和方法的学科领域。
它主要包括控制系统的基本概念、控制器的设计和调节、稳定性、系统传递函数、校正方法、系统的自动调节、闭环控制与开环控制等内容。
以下是对自动控制原理的概念的全面整理。
1.自动控制的基本概念自动控制指的是通过一定的控制手段,使控制系统能够根据设定的要求,对被控对象进行准确稳定的控制。
自动控制系统由输入、输出、控制器、执行机构和被控对象组成。
2.控制器的设计和调节控制器是自动控制系统中的核心部分,它接收输入信号并计算输出信号,以实现对被控对象的控制。
控制器的设计和调节包括选择合适的控制算法和参数调节方法。
3.稳定性稳定性是指系统在外部扰动或内部变化的情况下,仍能保持预期的输出。
稳定性分为绝对稳定和相对稳定,通过研究系统的稳定性可判断系统是否具有良好的控制性能。
4.系统传递函数系统传递函数是表征系统输入与输出关系的数学模型,它可以描述系统动态行为和频率响应特性。
通过系统传递函数可以进行系统分析和设计。
5.校正方法校正方法是指通过校正装置对被控对象的特性进行矫正,以提高系统的控制性能。
常见的校正方法包括开环校正和闭环校正。
6.系统的自动调节系统的自动调节是指通过自动调节装置,根据系统的输出信号和设定值之间的差异进行调节,以实现系统输出的稳定和准确。
7.闭环控制与开环控制闭环控制是指根据系统的反馈信号来调整控制器输出的控制方式,它具有较好的稳定性和抗干扰能力。
开环控制是指根据设定值直接进行控制,不考虑系统的反馈信号。
闭环控制和开环控制都有各自的适用范围和优劣势。
自动控制原理是现代工程领域中的重要学科,它在自动化生产、航空航天、机械制造、交通运输、电力系统等领域都有广泛应用。
通过深入理解和应用自动控制原理,可以提高系统的效率、准确性和稳定性,实现自动化生产和智能化控制。
自动控制原理
自动控制原理自动控制原理是一门应用广泛且重要的学科,它涉及到许多领域,如机械、电子、计算机等。
本文将探讨自动控制原理的定义、应用以及其在现代社会中的重要性。
一、自动控制原理的定义自动控制原理是一种通过使用传感器、执行器和控制算法来实现系统自动调节的技术。
它的目的是使系统能够自动地响应外部变化,并保持所需的状态。
自动控制原理的核心是反馈机制,通过不断地检测系统状态,并根据反馈信号对系统进行调节,以实现系统的稳定和优化。
二、自动控制原理的应用自动控制原理广泛应用于各个领域,如工业生产、交通运输、航空航天等。
在工业生产中,自动控制原理可以用于控制生产线的运行,实现自动化生产。
在交通运输中,自动控制原理可以用于控制交通信号灯,优化交通流量,提高交通效率。
在航空航天领域,自动控制原理可以用于飞机的自动驾驶系统,提高飞行安全性。
三、自动控制原理的重要性自动控制原理在现代社会中具有重要的意义。
首先,它可以提高生产效率和质量。
通过自动控制原理,可以实现生产过程的自动化,减少人力投入,提高生产效率。
同时,自动控制原理可以实时监测生产过程中的各项指标,并根据需要进行调节,保证产品质量的稳定性和一致性。
其次,自动控制原理可以提高安全性和可靠性。
在一些危险环境下,如核电站、化工厂等,人工控制存在一定的风险。
而自动控制系统可以通过传感器实时监测环境变化,并根据预设的控制算法进行自动调节,减少人为错误的发生,提高安全性和可靠性。
此外,自动控制原理还可以提高能源利用效率。
通过自动控制原理,可以对能源的使用进行优化调节,减少能源的浪费,提高能源的利用效率。
这对于资源有限的社会来说,具有重要的意义。
总之,自动控制原理是一门应用广泛且重要的学科。
它不仅可以提高生产效率和质量,提高安全性和可靠性,还可以提高能源利用效率。
随着科技的不断发展,自动控制原理在各个领域中的应用将会越来越广泛,对于推动社会进步和提高人类生活质量具有重要的作用。
自动控制原理名词解释
1.控制概念(1)开环控制:开环控制是最简单的一种控制方式。
它的特点是,按照控制信息传递的路径,控制量与被控制量之间只有前向通路而没有反馈通路。
闭环控制:凡是将系统的输出量反送至输入端,对系统的控制作用产生直接的影响,都称为闭环控制系统或反馈控制系统。
复合控制:是开、闭环控制相结合的一种控制方式。
(2)反馈:指将系统的输出返回到输入端并以某种方式改变输入,进而影响系统功能的过程,即将输出量通过恰当的检测装置返回到输入端并与输入量进行比较的过程。
(3)传递函数:在零初始条件下,系统输出信号的拉手变换与输出信号的拉氏变换的比。
(4)被控对象:指需要给以控制的机器、设备或生产过程。
执行机构:一种能提供直线或旋转运动的驱动装置,它利用某种驱动能源并在某种控制信号作用下工作。
(5)线性化:a条件:连续且各阶导数存在 b方法:工作点附近泰勒级数展开。
2.时域指标(1)上升时间tr:响应从终值10%上升到终值90%所需时间;对有振荡系统亦可定义为响应从零第一次上升到终值所需时间。
上升时间是响应速度的度量。
峰值时间tp:响应超过其终值到达第一个峰值所需时间。
调节时间ts:响应到达并保持在终值内所需时间。
(2)超调量σ%:响应的最大偏离量h(tp)与终值h(∞)之差的百分比。
振荡次数:是在阶跃信号作用下,系统在达到指定deta范围下,系统所震荡的总次数。
(3)动态降落:系统稳定运行时,突然加一个扰动量N,在过度过程中引起输出量的最大降落值Cmax称为动态降落。
恢复时间:系统从波动回复到稳态时候所需要的时间。
(4)稳态误差:对单位负反馈系统,当时间t趋于无穷大时,系统对输入信号响应的实际值与期望值(即输入量)之差的极限值,称为稳态误差,它反映系统复现输入信号的(稳态)精度。
3.频域特性(1)频率特性:对于线性系统来说,当输入信号为正弦信号时,稳态时的输出信号是一个与输入信号同频率的正弦信号,不同的只是其幅值与相位,且幅值与相位随输入信号的频率不同而不同。
最新自动控制原理.pdf
第一章自动控制的一般概念1.1 引言自动控制理论是研究关于自动控制系统组成、分析和设计的一般性理论,是研究自动控制共同规律的技术科学。
自动控制理论的任务是研究自动控制系统中变量的运动规律以及改变这种运动规律的可能性和途径,为建立高性能的自动控制系统提供必要的理论根据。
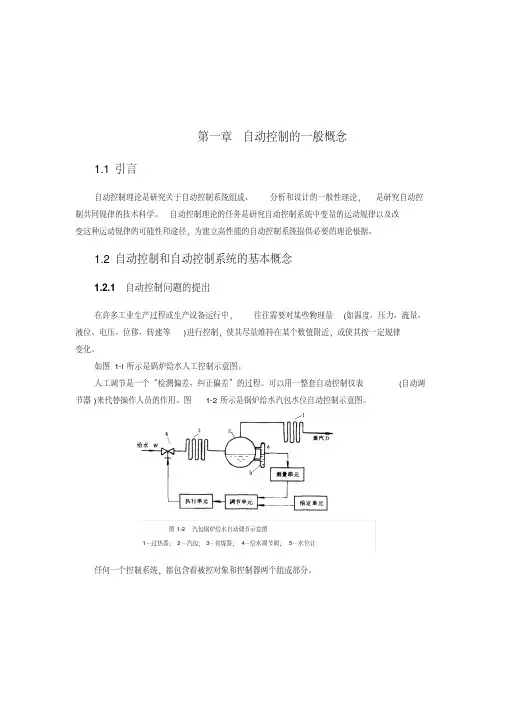
1.2 自动控制和自动控制系统的基本概念1.2.1自动控制问题的提出在许多工业生产过程或生产设备运行中,往往需要对某些物理量(如温度、压力、流量、液位、电压、位移、转速等)进行控制,使其尽量维持在某个数值附近,或使其按一定规律变化。
如图1-l所示是锅炉给水人工控制示意图。
人工调节是一个“检测偏差、纠正偏差”的过程。
可以用一整套自动控制仪表(自动调节器)来代替操作人员的作用。
图1-2所示是锅炉给水汽包水位自动控制示意图。
图1-2 汽包锅炉给水自动调节示意图1—过热器;2—汽包;3—省煤器;4—给水凋节阀;5—水位计任何一个控制系统,都包含着被控对象和控制器两个组成部分。
1.2.2 开环控制系统常见的控制方式有三种:开环控制、闭环控制和复合控制。
系统的控制输入不受输出影响的控制系统称为开环控制系统。
图1-3所示的烘箱温度控制系统是一个开环控制系统。
烘箱是被控对象,烘箱的温度是被控量,也称为系统输出量。
开关设定位置为系统的给定量或输入量,电阻及加热元件可看成是调压器(控制器)。
该系统中只有输入量对输出量的单向控制作用,输出量对输入量没有任何影响和联系。
烘箱温度开环控制系统可用图1-4所示的方框图表示。
1.2.3 闭环控制系统在图1-3所示的烘箱温度开环控制系统中,加入一些装置,构成了如图1-5所示的烘箱温度闭环控制系统。
系统中,烘箱是被控对象,炉温是被控量,给定量是由给定电位器设定的电压r u (表征烘箱温度的希望值)。
系统方框图如图1-6所示。
通常,把从系统输入量到输出量之间的通道称为前向通道;从输出量到反馈信号之间的通道称为反馈通道。
自动控制基本概念
自动控制基本概念自动控制是指利用各种自动化设备和技术手段,通过对被控对象进行监测、判断和调节,以达到预定目标的过程。
它在工业、交通、农业、医疗等领域发挥着重要作用,提高了生产效率,降低了人为失误的风险,改善了生活质量。
本文将介绍自动控制的基本概念和原理。
一、反馈控制反馈控制是自动控制的核心原理之一。
它通过对被控对象输出信号进行监测,并与预定目标进行比较,得出误差值。
根据误差值,控制系统调整输入信号,以使误差趋向于零,并维持系统在稳定状态下工作。
反馈控制系统一般由传感器、执行器和控制器组成。
二、开环控制与反馈控制相对应的是开环控制。
开环控制是在不考虑输出信号与预定目标之间的误差的情况下,直接根据经验或数学模型设置输入信号。
开环控制系统简单、成本较低,但容易受到外界干扰和系统参数变化的影响,导致控制效果不稳定。
三、控制对象控制对象是指在自动控制系统中需要被监测和调节的物理量或装置。
控制对象可以是温度、压力、流量等各种物理量,也可以是机器、车辆、植物等各种设备和系统。
不同的控制对象需要选用相应的传感器和执行器,并结合合适的控制算法进行控制。
四、控制器控制器是自动控制系统中的核心部件,用于对输入信号进行处理和输出控制信号。
常见的控制器有比例控制器、积分控制器和微分控制器。
同时,还可以通过组合不同类型的控制器,构建更为复杂和高级的控制系统。
五、控制算法控制算法是指控制器根据输入信号和误差值计算输出控制信号的方法和规则。
常用的控制算法有比例控制、积分控制、微分控制以及这些算法的组合。
不同的控制算法适用于不同的控制对象和应用场景,需要根据实际情况进行选择和调整。
六、自动化设备自动化设备是实现自动控制的工具和装置。
它包括传感器、执行器、控制器等各种硬件设备,以及相应的软件和算法。
自动化设备的发展使得自动控制更加灵活和智能化,提高了生产效率和品质。
七、控制策略控制策略是指根据具体的控制目标和需求,确定控制算法和参数的方法和规则。
自动控制原理(全套课件)
自动控制原理(全套课件)一、引言自动控制原理是自动化领域的一门重要学科,它主要研究如何利用各种控制方法,使系统在受到扰动时,能够自动地、准确地、快速地恢复到平衡状态。
本课件将详细介绍自动控制的基本概念、控制系统的类型、数学模型、稳定性分析、控制器设计等内容,帮助学员全面掌握自动控制原理的基本理论和方法。
二、控制系统的基本概念1. 自动控制自动控制是指在没有人直接参与的情况下,利用控制器使被控对象按照预定规律运行的过程。
自动控制的核心在于控制器的设计,它能够根据被控对象的运行状态,自动地调整控制量,使系统达到预期的性能指标。
2. 控制系统控制系统是由被控对象、控制器、传感器和执行器等组成的闭环系统。
被控对象是指需要控制的物理过程或设备,控制器负责产生控制信号,传感器用于测量被控对象的运行状态,执行器则根据控制信号对被控对象进行操作。
三、控制系统的类型1. 按控制方式分类(1)开环控制系统:控制器不依赖于被控对象的运行状态,直接产生控制信号。
开环控制系统简单,但抗干扰能力较差。
(2)闭环控制系统:控制器依赖于被控对象的运行状态,通过反馈环节产生控制信号。
闭环控制系统抗干扰能力强,但设计复杂。
2. 按控制信号分类(1)连续控制系统:控制信号是连续变化的,如模拟控制系统。
(2)离散控制系统:控制信号是离散变化的,如数字控制系统。
四、控制系统的数学模型1. 微分方程模型微分方程模型是描述控制系统动态性能的一种数学模型,它反映了系统输入、输出之间的微分关系。
通过求解微分方程,可以得到系统在不同时刻的输出值。
2. 传递函数模型传递函数模型是描述控制系统稳态性能的一种数学模型,它反映了系统输入、输出之间的频率响应关系。
传递函数可以通过拉普拉斯变换得到,它是控制系统分析、设计的重要工具。
五、控制系统的稳定性分析1. 李雅普诺夫稳定性分析:通过构造李雅普诺夫函数,分析系统的稳定性。
2. 根轨迹分析:通过分析系统特征根的轨迹,判断系统的稳定性。
自动控制原理知识点总结
自动控制原理知识点总结一、自动控制系统的基本概念自动控制,简单来说,就是在没有人直接参与的情况下,通过控制器使被控对象按照预定的规律运行。
一个典型的自动控制系统通常由控制对象、控制器、测量元件和执行机构等部分组成。
控制对象就是我们要控制的那个东西,比如一个电机、一个温度场或者一个生产过程。
控制器则是根据输入的偏差信号,按照一定的控制规律产生控制作用,去驱动执行机构。
测量元件负责测量被控量,并将其转化为电信号反馈给控制器。
执行机构接受控制器的控制信号,对控制对象施加作用。
自动控制系统按照有无反馈可以分为开环控制系统和闭环控制系统。
开环控制系统的输出量对系统的控制作用没有影响,结构相对简单,但控制精度较低。
闭环控制系统则将输出量反馈回来与给定值进行比较,形成偏差,然后根据偏差来调整控制作用,因此控制精度高,但系统相对复杂,可能会出现稳定性问题。
二、控制系统的数学模型要对一个控制系统进行分析和设计,首先要建立它的数学模型。
数学模型就是用数学语言来描述系统的输入、输出和内部状态之间的关系。
常见的数学模型有微分方程、传递函数和状态空间表达式。
微分方程是最基本的描述形式,但求解比较复杂。
传递函数则是在零初始条件下,输出量的拉普拉斯变换与输入量的拉普拉斯变换之比。
它可以方便地分析系统的频率特性和稳定性。
状态空间表达式则能更全面地描述系统的内部状态和动态特性。
建立数学模型的方法有分析法和实验法。
分析法是根据系统的物理规律和结构,推导出数学方程。
实验法则是通过对系统施加输入信号,测量输出响应,然后用系统辨识的方法得到数学模型。
三、控制系统的时域分析时域分析是直接在时间域上研究系统的性能。
主要的性能指标有稳态误差、上升时间、峰值时间、调节时间和超调量。
稳态误差反映了系统的准确性,它与系统的类型和输入信号的形式有关。
对于单位阶跃输入, 0 型系统有稳态误差,1 型及以上系统稳态误差为零。
上升时间、峰值时间和调节时间反映了系统的快速性。
自动控制原理重要概念
第1章自动控制概念1.自动控制指:在没有人直接参与下,利用外加设备和装置,使机器设备或生产过程的某个工作状态或参数自动按照预定的规律运行。
2.外加设备或装置称为控制器或控制装置;机器设备或生产过程称为控制对象;被控制的工作状态或参数称为被控量或输出量;期望输出的值或状态称为给定量,妨碍控制的因素称为扰动量,给定量和扰动量统称为输入量。
(如下图)。
3.自动控制方式(按控制系统的结构区分):开环控制信号只从控制装置向被控对象传递,而无反向传递(即无反馈),即信号传递路径不构成闭合回路。
结构简单,成本低。
但因为没有反馈,所以没有减少误差的功能。
当受到干扰后误差较大。
结构简单、成本低,但误差大闭环控制(自控的主要研究对象)通过测量装置检测输出量,并与输入量进行比较,进而使控制装置按照二者偏差来调节输出量。
此系统存在信号的反向传递(即有反馈),构成了闭合回路。
(注:由给定量至被控量的通道称为前向通道,由被控量至系统输入端通道称为反馈通道。
)误差小,在工程上广泛应用误差小,广泛应用复合控制(略)4.自动控制系统的分类:①线性控制系统和非线性控制系统1.线性系统元件的输入输出特性具有线性特性(线性不是指一条直线)。
满足叠加原理和齐次原理(同电路)。
2.即系统中的元件是线性元件,那么称为线性系统。
非线性系统就是系统中有非线性元件。
3.严格的线性系统是不存在的,工程上对一些非线性元件常常简化和近似处理,当作线性元件对待。
②连续控制系统和离散控制系统(同信号与系统)连续控制系统:信号是时间t的连续函数。
离散控制系统:信号是脉冲序列。
③其他分类(略)5.自动控制系统的要求:稳定;快速;准确。
第2章控制系统的数学模型本章介绍①微分方程②传递函数③方块图④信号流图,等数学模型的建立。
数学模型指:描述系统输入量、输出量以及内部各变量之间的相互关系的数学表达式。
微分方程反映元件输入量与输出量之间的方程,是在时域内描述系统动态过程的数学模型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自控概念及定义
1.开环控制的定义:若系统的被控制量对系统的控制作用没有影响,则此系统叫开环控制
系统
2.闭环控制的定义:凡是系统的被控制信号对控制作用有直接影响的系统都叫闭环控制系
统
3.恒值控制系统的定义:如果反馈控制系统的参考输入信号为常量则称这类反馈控制系统
为恒值控制系统
4.程序控制系统的定义:系统的参考输入信号按照一定的时间函数变化则称这类反馈控制
系统为程序控制系统
5.随动控制系统的定义:闭环控制系统中,如果参考输入信号为一任意时间函数,其变化
规律无法预先予以确定,则承受这类输入信号的闭环控制系统叫做随动控制系统
6.被控对象的定义:控制系统中被控制的设备或过程
7.被控参数或输出量的定义:指被控对象中按一定规律变化的物理量,与输入信号间满足
一定的函数关系
8.扰动量的定义:所有妨碍控制量对被控量进行正常控制的因素称为扰动量
9.控制量的定义:直接加到被控对象、直接改变被控量的变量,称为控制量
10.反馈量的定义:由系统(或元件)输出端取出并反向送回系统(或元件)输入端的信号
称为反馈量
11.偏差量的定义:参考输入与主反馈信号之差
12.控制器的定义:控制系统中除了被控对象外各个部分的组合
13.负反馈控制基本原理:在反馈控制系统中,控制装置对被控对象施加的控制作用,是取
自被控量的反馈信息,用来不断修正被控量与输入量之间的偏差,从而实现对被控对象进行控制的任务,这就是负反馈控制的原理。
14.前向通道的定义:在闭环控制系统中,从系统输入量到系统被控量之间的通道称为前向
通道
15.反馈通道的定义:在闭环控制系统中,从被控量到输入端的反馈信号之间的通道称为反
馈通道
16.对控制系统的基本要求:稳定,精确,迅速
17.传递函数的定义:在初始条件为零时,线性定常系统或元件输出信号的拉氏变换式与输
入信号的拉氏变换式之比称为该系统或元件的传递函数
18.什么叫基本环节:一个复杂的控制系统分成的一个个小部分称为环节。
从动态方程、传
递函数和运动特性的角度看不宜再分的最小环节称为基本环节
19.比例环节传递函数:G(s)=K
20.惯性环节传递函数:G(s)=1/(Ts+1)
21.积分环节传递函数:G(s)=1/s
22.振荡环节传递函数:G(s)=1/()=
23.纯微分环节传递函数:G(s)=s
24.一阶微分环节传递函数:G(s)=s+1
25.二阶微分传递函数:G(s)=
26.延迟环节传递函数:G(s)=
27.二阶系统五个性能指标:上升时间、峰值时间、最大超调量、过渡过程时间、振
荡次数N
28. 闭环主导极点定义:假若距虚轴较远的闭环极点的实部与距虚轴最近的闭环极点的实部
的比值大于或等于5,且在距虚轴最近的闭环极点附近不存在闭环零点。
这个离虚轴最近的闭环极点将在系统的过渡过程中起主导作用,称之为闭环主导极点。
29. 控制系统稳定充要条件:系统特征方程式的根全部具有负实部
30. 劳斯判据必要条件:控制系统特征方程式的所有系数均为正值而且特征方程式不缺项
31. 劳斯判据的充分条件:劳斯阵列中第一列所有项均为正号
32. 系统稳态误差的定义:误差信号e(t)的稳态分量定义为系统的稳态误差,记为 ss e (t )
33. 误差与偏差的关系:E(s)=
34. 位置误差系数的定义:p K =)(lim 0s G s →=G(0)
35. 速度误差系数的定义:v K =0
lim →s sG(s) 36. 加速度误差系数的定义:a K =0lim →s 2
s G(s) 37. 根轨迹的定义:控制系统特征方程式的根(闭环极点)随系统参数k 的变化在[s]平面上行
走的轨迹
38. 环节或系统频率特性的定义:对于传递函数G(s),令s=jw 得到的G(jw)就是系统或元件的频
率特性,它是输入信号频率w 的复变量.系统或元件的的频率特性表示输入量为正弦信号时,其输出信号的稳态分量与输入信号的关系
39. Niquist 稳定判据的基本内容:若闭环系统的开环传递函数G(s)H(s)有P 个正实部极点,则
闭环系统稳定的充要条件是,当s 按顺时针方向沿Niquist 围线连续变化一周时,G(s)H(s)绘出的封闭曲线应当按逆时针方向包围(-1,j0)点P 周
40. 相角裕度的定义:开环频率特性G(jw)H(jw)在剪切频率 处所对应的相角与- 之差,记为γ
41. 幅值裕度的定义:在相角交越频率,开环频率特性幅值的倒数,记为
42. 什么叫串联校正:若元件在前向通道,与不可变部分相串联,则称此种形式的校正为串联
校正
43. 什么叫反馈校正:若校正元件在局部反馈回路,与不可变部分组成内反馈环,则称此种校
正形式为反馈校正
44. 串联校正包括哪三种:超前校正,滞后校正,滞后-超前校正
45. 比例控制(P 控制)的传递函数:C(s)/R(s)=
= 46. 比例+微分控制(PD 控制)传递函数:
47. 比例+积分控制(PI 控制)传递函数:
48. 比例+积分+微分控制(PID 控制)传递函数:
49. 微分控制的主要作用:提高控制精度
50. 积分控制的主要作用:提高系统类型数,从而改善控制系统稳态性能
仅供参考 1.剧场Theatre
2.舞台Stage
3.镜框式舞台Proscenium stage
4.镜框框架Proscenium Arch
5.伸出式舞台Thrust Stage
6.中心式舞台arena
7.可变式舞台blackbox
8.主舞台Main Stage
9.副舞台Wing Space
10.大幕线plaster line
11.中心线Center Line
12.表演区Acting Area
13.上场门Stage Right
14.下场门Stage Left
15.转台Revolving Stage, "Revolving Stage"是原先舞台上的一部份
turnable Turntable是附加上的小转台
16.升降台Elevator Stage
17.后台Back Stage
18.台仓Basement/trap room 如果可以在主舞台上升降称为"trap room"
19.乐池Orchestra Pit
20.台唇Apron
21.观众席Auditorium,house
22.前厅Lobby/Foyer
23.天顶Grid Grid是吊杆能到达的最高点
24.穿帮exposed
25.眼点sightline sight line是观众可见的舞台范围
26.吊杆Pipe/ Batten pipe是用铁做的batten是用木头做的
27.吊杆绳索Purchase Line
28. ?? arbor "arbor"是增加或减少重量的架子让吊杆上升或下降
29.平衡砣Counter Weight
30.大幕Main Curtain
31.二道幕MidStage Curtain/midstage cutoff
32.边幕Wings/ Legs wings通常是硬材值legs是软布材直
33.沿幕Teaser teaser是大幕的一部份
Border border是随着边幕的一部份
34.天幕Cycloroma
35.纱幕muslin/Scrim 依照材直的不同命名
36.黑底幕upstage Black Curtain
37.防火幕Fire Curtain
38. ?? upstage
39. ?? downstage。