玻璃钢纤维缠绕过程控制系统研究
玻璃钢纤维缠绕设备缠绕精度的影响因素及提高方法
玻璃钢纤维缠绕设备缠绕精度的影响因素及提高方法张勤德(国家建材局璃钢研究设计院 北京 102101)摘要: 本文概述了玻璃钢缠绕设备缠绕偏差产生的原因,分析了提高缠绕精度的意义,着重介绍了在缠绕设备中与缠绕精度有关的因素,以及在缠绕计算、设计制造、元件选型等方面应该注意的问题及解决方法。
关键词: 缠绕精度 影响因素 提高方法1 前 言玻璃钢是一种性能优良的复合材料,具有重量轻、强度高、耐电、耐热、耐腐蚀、可设计性和易于成型等特点,应用前景广阔,目前已在能源、煤炭、交通、石化、轻工、建筑、市政、环保及航空航天等领域得到广泛的应用。
纤维缠绕是玻璃钢制品的重要成型工艺之一。
它是将玻璃钢增强材料———玻璃纤维,通过特定装置浸上一定量的树脂糊,然后依据特定的缠绕运动规律,将浸胶后的增强材料缠绕在旋转着的芯模上,形成柔性玻璃钢半成品,最后经固化、修整等工序获得玻璃钢成品。
纤维缠绕玻璃钢制品主要有管道(包括方管、变径管及锥管等)、贮罐(包括椭球头、球头、锥头、平头、球形贮罐)等。
其制品规格覆盖面大,制品直径或当量直径可从几毫米到十多米。
纤维缠绕玻璃钢成型工艺所需设备主要有内衬制作设备、缠绕机、固化设备、脱模设备及修整设备等。
其中缠绕机是最重要的设备,它有多种类型,以制品规格分,可分为大、中、小、微型缠绕机;以结构形式分,可分为卧式、立式、环绕式等;以控制水平来分,可分为机械式、液压伺服式、微机控制式;以制品长度分,可分为连续式和定长式;以运动自由度分,可分为二、三、四、五、六轴缠绕机。
无论何种缠绕机都由动力源、传动机构、执行机构、控制机构及辅助机构组成,都具有相近的原理、相似的功能,即将增强材料以一定的缠绕规律缠绕到芯模上,形成玻璃钢缠绕制品。
缠绕规律的实现依靠设备的各种机构,因此,每种机构零件的精密性必然影响缠绕规律实现的准确性,即影响缠绕精度。
本文主要分析介绍提高缠绕精度的意义和影响缠绕精度的一些相关因素,以及缠绕设备设计与调试中的一些具体经验。
玻璃钢膜壳螺旋缠绕技术说明
玻璃钢膜壳螺旋缠绕技术说明玻璃纤维增强塑料纤维增强热固性塑料,俗称玻璃纤维增强塑料。
唯赛勃玻璃钢膜壳的缩写。
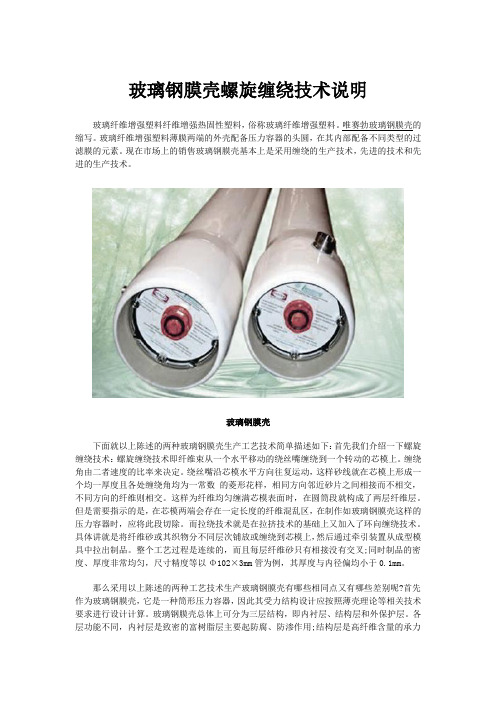
玻璃纤维增强塑料薄膜两端的外壳配备压力容器的头圆,在其内部配备不同类型的过滤膜的元素。
现在市场上的销售玻璃钢膜壳基本上是采用缠绕的生产技术,先进的技术和先进的生产技术。
玻璃钢膜壳下面就以上陈述的两种玻璃钢膜壳生产工艺技术简单描述如下:首先我们介绍一下螺旋缠绕技术:螺旋缠绕技术即纤维束从一个水平移动的绕丝嘴缠绕到一个转动的芯模上。
缠绕角由二者速度的比率来决定。
绕丝嘴沿芯模水平方向往复运动,这样砂线就在芯模上形成一个均一厚度且各处缠绕角均为一常数的菱形花样,相同方向邻近砂片之间相接而不相交,不同方向的纤维则相交。
这样为纤维均匀缠满芯模表面时,在圆筒段就构成了两层纤维层。
但是需要指示的是,在芯模两端会存在一定长度的纤维混乱区,在制作如玻璃钢膜壳这样的压力容器时,应将此段切除。
而拉绕技术就是在拉挤技术的基础上又加入了环向缠绕技术。
具体讲就是将纤维砂或其织物分不同层次铺放或缠绕到芯模上,然后通过牵引装置从成型模具中拉出制品。
整个工艺过程是连续的,而且每层纤维砂只有相接没有交叉;同时制品的密度、厚度非常均匀,尺寸精度等以Φ102×3mm管为例,其厚度与内径偏均小于0.1mm。
那么采用以上陈述的两种工艺技术生产玻璃钢膜壳有哪些相同点又有哪些差别呢?首先作为玻璃钢膜壳,它是一种筒形压力容器,因此其受力结构设计应按照薄壳理论等相关技术要求进行设计计算。
玻璃钢膜壳总体上可分为三层结构,即内衬层、结构层和外保护层。
各层功能不同,内衬层是致密的富树脂层主要起防腐、防渗作用;结构层是高纤维含量的承力层,其承受载荷引起的各种应力;外保护层则是为结构层玻璃钢的老化提供保护,同时又有外观装饰作用,作为玻璃钢膜壳,外观颜色基本上有三种,即白色、蓝色和黑色,以白色为主。
玻璃钢膜壳壳体体结构层的设计计算我们可以采用以下几个计算公式:1、由内压引起的环向应力:式中δoθ——环向应力;Pω——工作压力(或设计工作压力)D ——壳体内径;t ——壳体壁厚。
论文:连续缠绕玻璃钢管道生产工艺、技术的最新进展

连续缠绕玻璃钢管道生产工艺、技术的最新进展连续缠绕玻璃钢管材技术在我国是一个新兴的玻璃钢管道生产工艺,这种技术设备在国际上也只有意大利、挪威、英国等几个发达国家能够制造。
我国目前有两条从欧洲引进的连续缠绕设备,一条是河南安阳某公司在十年前引进的,另一条是上海某公司在2009年引进的,这两条设备的引进价格都在人民币四千万元以上。
所谓的连续缠绕玻璃钢管就是由钢带的连续前后循环运转,在向前移动的内芯模上连续完成纤维缠绕、复合、加砂、固化等工艺过程。
由于生产的连续性,使设备具有工艺控制便利、劳动强度低、污染小、工作环境好、生产效率高,管材质量稳定等优势。
青岛朗通机器有限公司的连续缠绕玻璃钢管材的国家专利技术,打破了我国以往只有定长断续法生产玻璃钢管的历史,开创了我国运用和赶超国际最先进的玻璃钢管生产技术的先河。
我公司的连续缠绕玻璃钢管技术具备独有的技术工艺和独特的成型专利技术,生产线通过了专家鉴定。
现在设备已经批量生产,在国内外都有销售,市场前景非常乐观。
下面就从以下几个方面详细阐述一下我公司的连续缠绕玻璃钢管道的生产工艺、技术的最新进展:一、连续缠绕玻璃钢管成型技术的研制过程青岛朗通公司的前身是一家从事塑料制品的机械设备制造的专业厂家,公司拥有工艺研发、机械设计、自动化程控、高分子材料分析等多种学科的技术研发中心,有着多年的机械加工制造经验和丰富的管道生产、施工经验。
公司曾经开发了多个在国内十分具有影响利的产品:有PVC塑料芯层发泡管技术、铝塑复合管技术、大口径中空壁缠绕管技术、PPR管技术、供水/燃气管技术等管道项目。
值得一提的是大口径中空壁缠绕管技术,可生产直径200-3000mm的管道,其技术是采用方管连续缠绕成型的原理完成的,这种成型技术在国内首家成功推出后很快被国家建设部列为重点推广项目,在国内广泛地推广普及。
大口径塑料管道的成功研制打破了我国在排水、输水管网一直延续使用的混凝土管的历史,加快了以塑代钢、以塑取代混凝土管的步伐。
新型纤维缠绕张力控制系统研究
3 3
。
现有数控缠绕机的张力系统多采用张力独立
控 制 ]运 动控 制 与 张 力 控 制 分 立 。大 多 数 张 力 ,
控制系统选用单 片机 或工控 机搭配多 功能采集 卡 J 。整 个 系统 较 为 复 杂 , 本 较 高 , 定 程 度 上 成 一
影 响了 高端缠 绕 机 的推广 应用 。 可编程 多 轴 控制 器 ( M C) 由美 国 D l a PA 是 eaTu t 公 司生 产 的一种 多轴 运 动控 制器 。它 主要 由 M t o oo — r l 60 a 00系列 D P与 D l a 司 开发 的 门户 阵列 5 S et T u公 a
劳性能。而张力选择不当或者缠绕过程中张力波动 , 可使制品的强度损失多达 2%以上 。缠绕张力制度 0 的合理与否取决于结构设计与工艺设计 。合理 的张 力值能否得以准确和稳定的实现 , 则取决于缠绕张力
控 制 系统 的精 度 。在 缠 绕设 备 中需 要 对 张力 进 行 精 密控制 , 之保 持恒定 , 使 或者按 照一定 的规 律变化 , 以
2 张力控 制系统
参 照 实 际生产 对 高性 能碳 纤维 的缠 绕 提出 的张
力制度要 求 , 定系统 的纤维张力 控制 范 围 1 设 0~ 6 N左右 、 0 出纱 速 度 l s以下 , 制 精度 ±1 为 m/ 控 N。
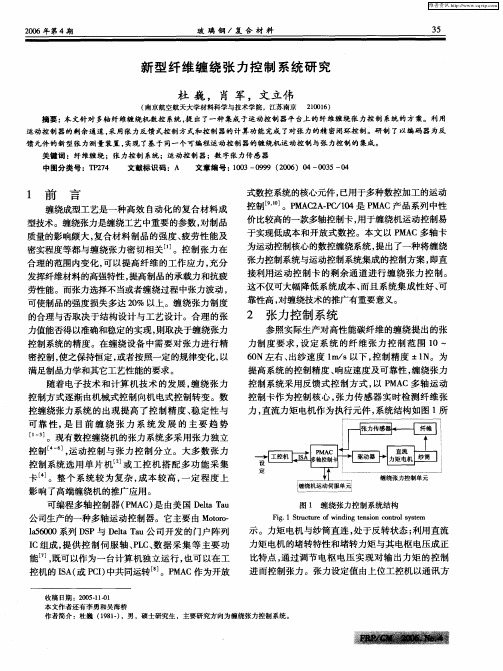
提 高系统 的控制 精度 、 响应速 度及 可靠 性 , 缠绕 张 力 控 制系 统采 用反 馈 式 控 制 方式 , P C多 轴 运 动 以 MA
图 1 缠 绕 张 力 控 制 系 统结 构
F g 1 S r cu e o i d n n in c nr ls se i . t t r fw n i g t s o t y tm u e o o
玻璃钢缠绕机控制系统设计的开题报告
玻璃钢缠绕机控制系统设计的开题报告一、选题背景及意义玻璃钢缠绕机是用于加强塑料制品和构件的一种重要生产设备,广泛应用于建筑、道路、桥梁等领域。
在玻璃钢缠绕机生产过程中,控制系统是其中的核心部分,对于生产效率和产品质量具有重要影响。
本次选题旨在设计玻璃钢缠绕机控制系统,实现对玻璃钢缠绕机运行状态的实时监控和控制,提高生产效率和产品质量。
该控制系统在工业自动化中具有广泛应用的价值。
二、研究内容和目标本文将从玻璃钢缠绕机的工作原理和控制要求入手,研究其控制系统的设计与实现。
研究内容包括以下方面:1. 玻璃钢缠绕机的工作原理和控制要求分析;2. 玻璃钢缠绕机控制系统的整体设计方案;3. 玻璃钢缠绕机控制系统中各个部分的功能和实现方案;4. 玻璃钢缠绕机控制系统的调试和优化。
本文的目标是设计出一套稳定可靠、具有实时监控和自适应控制功能的玻璃钢缠绕机控制系统,提高玻璃钢缠绕机的生产效率和产品质量。
三、研究方法本文将采用分析法和实验法相结合的方式进行研究。
通过分析玻璃钢缠绕机的工作原理和控制要求,结合控制系统的设计原则和技术,制定出完整的玻璃钢缠绕机控制系统方案,并通过实验对系统的稳定性和性能进行验证和优化。
四、论文结构本文将分为五个部分,分别是:绪论、玻璃钢缠绕机的工作原理和控制要求、玻璃钢缠绕机控制系统的整体设计方案、玻璃钢缠绕机控制系统中各个部分的功能和实现方案、总结与展望。
其中,绪论部分主要介绍玻璃钢缠绕机控制系统的意义和研究内容;玻璃钢缠绕机的工作原理和控制要求部分详细描述了玻璃钢缠绕机的机械结构和工作原理,以及对工艺过程和生产质量的要求;玻璃钢缠绕机控制系统的整体设计方案部分主要介绍控制系统的总体结构和功能模块的设计;玻璃钢缠绕机控制系统中各个部分的功能和实现方案部分分别对控制系统中的硬件设备和软件模块进行详细描述;总结与展望部分对论文进行总结并对未来工作进行展望。
玻璃钢连续缠绕微机控制系统设计的开题报告

玻璃钢连续缠绕微机控制系统设计的开题报告一、选题背景及研究意义玻璃钢连续缠绕技术是目前广泛应用于化工、轻工、装饰等领域的一种生产工艺。
传统玻璃钢连续缠绕过程主要依靠人工操作,效率低、质量难以保证。
本系统旨在设计一种基于微机控制的玻璃钢连续缠绕系统,主要涉及到系统的硬件电路设计、软件编程控制和全过程动态监测与控制等方面,从而提高工作效率、降低人工成本以及提高产品质量,具有一定的实用性和创新性。
二、研究内容1.了解玻璃钢连续缠绕技术及目前流程中存在的问题和不足。
2.进行硬件电路设计,包括控制器、传感器、执行机构等电路的搭建和连接。
3.进行系统的软件编程设计,实现对玻璃钢连续缠绕过程的精确控制。
4.设计并搭建全过程动态监测系统,通过对玻璃钢连续缠绕过程的强制监测,实现对整个生产过程的全面掌控。
5.结合仿真软件对系统进行仿真分析,优化系统设计。
三、研究方法1. 文献资料的收集、整理和研究分析。
2. 通过实验和测试,获取玻璃钢连续缠绕过程相关的数据,对系统的实验结果进行分析。
3. 利用计算机仿真软件对系统进行仿真,评估系统的性能。
四、预期成果1.完成玻璃钢连续缠绕系统的硬件与软件设计,实现对玻璃钢连续缠绕过程的全链条控制。
2.结合全过程动态监测系统,对玻璃钢连续缠绕过程进行强制监测与控制,提高产品质量。
3.通过仿真分析,优化系统的设计。
4.本研究的成果可为玻璃钢工业相关领域的生产提供技术支持。
五、进度安排1.前期准备(一个月):主要是收集相关文献资料,了解玻璃钢连续缠绕工艺及市场现状。
2.系统硬件与软件设计(三个月):包括控制器、传感器及执行机构等电路的搭建和连接,编写控制程序等。
3.全过程动态监测系统设计(一个月):设计并搭建全过程动态监测系统,完成检测程序的编写。
4.系统仿真(一个月):基于仿真软件进行系统仿真,进行仿真分析和系统设计优化。
5.实验与数据分析(两个月):通过实验测试和数据分析,验证系统设计的可行性和有效性。
浅谈纤维缠绕张力控制机构的结构及控制系统设计论文5则范文
浅谈纤维缠绕张力控制机构的结构及控制系统设计论文5则范文第一篇:浅谈纤维缠绕张力控制机构的结构及控制系统设计论文引言纤维缠绕是玻璃钢生产中的重要成型工艺之一,纤维缠绕工艺是纤维在一定的预张力作用下,浸渍树脂粘结剂后,按照一定的线型有规律地排布在芯模上,在缠绕过程中,提高密实程度,进而提高制品的强度。
在复合材料制品缠绕成型过程中,对纤维材料施加张力并对张力进行精密控制是十分重要的,施加张力可以使纤维拉直、驱除气泡、渗透树脂,使缠绕出的制品更加紧密,同时为了避免因张力过大造成纤维断裂而影响产品的质量。
这又对缠绕张力参数的控制提出了更高的要求。
设备机构设计计算机控制缠绕是用纤维预浸树脂通过特定的机械和控制,将已浸过树脂的纤维,按所要求的线型规律缠绕至芯模表面上,其性能水平对缠绕制品的质量和工作性能起着决定作用。
2.1 缠绕工艺玻璃纤维从带有张力控制的纱架引出,经过树脂浸透,进入安装在行走轨道的缠绕小车上的绕丝嘴,并按一定规律均匀缠绕在旋转的模具上。
缠绕小车延轨道做纵向直线来回运动,绕丝嘴垂直轨道做径向进退运动。
主轴模具1 由伺服电机根据要求通过减速机减速做均匀旋转,其旋转速度由编码器输出反馈;缠绕小车3 由伺服电机根据所需的要求通过减速机减速延轨道4 做纵向均速来回运动,其行走速度由编码器输出反馈;绕丝嘴2 由伺服电机根据要求通过减速机减速做径向进退运动,其运动速度由编码器输出反馈。
玻璃纤维5 从带有张力测量反馈装置7 的纤维安装控制8 引出,经过胶槽6 浸透树脂后,进入安装在缠绕小车3 上的绕丝嘴2;主轴的旋转、小车的纵向运动和绕丝嘴的径向运动组成缠绕机的主运动,由计算机控制。
由于纤维缠绕于模具上的张力直接影响到产品的质量,所以纤维的张力控制是非常重要的。
2.2 缠绕机结构由于计算机控制纤维缠绕机是将纤维按照一定的规律均匀的缠绕在芯模上而成型的专用设备,组成主体的各部件可实现计算机控制三坐标。
在满足工艺要求的前提下,又考虑结构的紧凑性,为此总体布局将主轴箱、尾座、轨道小车、绕丝嘴设计在一个主体框架上,并根据制品的大小设计成两工位缠绕,如图2。
纤维缠绕张力对玻璃钢制品质量的影响及控制措施
111
2019 年第 11 期
纤维缠绕张力对玻璃钢制品质量的影响及控制措施
张志坚ꎬ 宋长久 ∗ ꎬ 章建忠ꎬ 费其锋
( 巨石集团有限公司ꎬ 桐乡
314500)
摘要: 在玻璃钢缠绕成型工艺中ꎬ纤维缠绕张力的控制是关系到玻璃钢制品性能和质量的关键技术ꎮ 本文以缠绕成型工
强塑料树脂含量试验方法»
[15]
进行测试ꎮ
缠绕张力( 单位:N / 根纱) 测试:通过数显弹簧
Fig 2 Comparison diagram of different fiberglass
缠绕层数:10 层ꎻ
types under the same layout
固化工艺:24 h 常温自然固化ꎮ
2 4 性能测试
管道轴向拉伸强度按照 ASTM D2105 标准
[14]
进
行测试ꎮ
玻纤含量按照 GB / T 2577—2005« 玻璃纤维增
通讯作者: 宋长久 (1984 ̄) ꎬ 男ꎬ 学士ꎬ 高级工程师ꎬ 主要从事玻璃纤维和玻璃钢复合材料方面的研究ꎬ changjiu song@jushi comꎮ
FRP / CM 2019 No 11
纤维缠绕张力对玻璃钢制品质量的影响及控制措施
112
2019 年 11 月
纤维缠绕成型是树脂基复合材料的主要成型工
生两种情况:主动施加的张力是为了满足纤维在芯模
艺之一ꎬ其工艺是将浸渍树脂的纤维在一定张力下ꎬ
上按规定线型排列、增加浸透效果、控制树脂含量等
按照设定的角度和铺层缠绕于芯模上ꎬ经固化、脱
玻璃钢缠绕成型工艺设计要求ꎬ而在缠绕过程中设
模、加工制得玻璃钢制品
浅谈纤维缠绕机自动控制系统的设计与实现方法
浅谈纤维缠绕机自动控制系统的设计与实现方法
•缠绕机是工业打包环节中不可或缺的机械包装设备。
未来更好的适应市场的要求,机械包装设备的生产商们研发了各种类型的缠绕机设备。
如纤维缠绕机就是使用特别好的一款缠绕机设备。
纤维缠绕机是是玻璃钢管道及容器等纤维缠绕制品生产的主要设备,它们在国内大口径玻璃钢钢管、罐生产中发挥重要作用。
•而在一般的纤维缠绕机设备,以玻璃钢缠绕机为例,在正常运行过程中,主轴驱动电机在控制系统的控制下,经减速机带动传动轴,驱动芯模自轴转动。
同时控制缠绕台车及其传动机构带着导丝架等按特定速度沿芯模轴向往复运动,这样纤维带将沿着芯模的筒身进行规则缠绕。
一般在系统运行过程中,缠绕台车在起、停及大范围变速运行过程中常伴有抖颤、提带、降带不平衡等现象。
•这种连续的工作方式会给操作人员的身体有影响,甚至会危及整个生产的安全。
所以星派的设计针对这种情况,仔细的分析了缠绕机的运行过程及实际运行情况得知,水平方向运行的载人式缠绕台车,车载人员的舒适感与其运行的加速度的变化率密切相关。
•为此,我们必须在对各台车位置与主轴转角跟踪控制的同时,还需对缠绕台车的起、停及生产运行中的缠绕台车的最大加减速度进行合理控制。
一、台车控制系统的硬件设计,在台车的运行特性分析在缠绕台车速度运行特性方面借鉴载人电梯的速度运行特性,因为它们在起、停的变速要求方面的相似之处。
薄膜缠绕机
不锈钢法兰
缠绕包装机
谢谢观赏。
玻璃钢缠绕机控制的几种方法
玻璃钢缠绕机控制系统的几种方法纤维缠绕机是复合材料结构产品的关键生产设备。
纤维能够按照设计的线型完成产品的缠绕,使纱片均匀覆盖表面,控制系统是最核心的技术。
随着复合材料工业的迅速发展,纤维缠绕机的需求大幅度增加。
基于计算机数控技术的缠绕机逐步取代了手工糊制和机械式缠绕机。
产品质量和生成效率都大幅提高。
经过多年的发展,目前的数控缠绕机的控制系统主要分为以下几种:一.PLC + 触摸屏:该系统成本低,系统简单。
由于PLC运行速度低,编程语言简单,再加上与触摸屏进行通信,而触摸屏又是用组态语言。
基于以上特点,该系统在高速缠绕中很难胜任,线型纱片不能实时修正。
由于编程语言的限制,很难完成功能齐全,灵活多变的缠绕程序设计。
二.PC + 运动控制器:该系统成本较高,维护困难。
不好推广。
三.工业控制计算机 + 运动控制卡:该系统结构紧凑,稳定性好。
由于cpu运行速度高,而且基于高级语言完成的程序设计。
能够很好完成纤维缠绕的所有功能。
本文就针对第三种控制系统做一个详细介绍:缠绕机它有多种类型,以制品规格分,可分为大、中、小、微型缠绕机:以结构形式分,可分为卧式、立式、环绕式等;以制品长度分,可分为连续式和定长式;以运动自由度分,可分为二、三、四、五、六轴等。
玻璃钢缠绕系统主要由三部分组成,一是主轴系统,拖动制品芯模绕轴旋转。
二是小车系统,小车在床身上沿轴线使导丝头作直线往复运动。
二者按一定速比要求同时运动,完成纤维在芯模上的缠绕,达到制品的技术要求。
三是控制系统,控制完成不同规格的制品的生产。
缠绕线型分为螺旋、环向和纵向。
缠绕机微机控制系统组成:1.台湾工业控制计算机.2.日本松下伺服系统.3.液晶彩色显示器一台.4.台湾变频器一台.5.日本欧姆龙编码器一个6.控制软件一套。
7.键盘一个。
主要功能1.全自动状态:能够根据缠绕线型工艺设计,自动完成螺旋和环向缠绕的线型设计,不需要人工转换。
这对管道缠绕,尤其是电缆管缠绕极大地提高生产能力,减小了工人操作强度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
要想使纤维 纱片连续和定 期地缠绕到芯模 之上 , 一定要 严 格保持 导丝 头和芯模 的相 对运动 , 也就是要遵 循缠绕规律 。缠
绕 规 律 是 缠 绕 产 品质 量 得 到 保 证 的重 要 前 提 , 决 定 了产 品 结 也 构 强 度 在 不 同方 向 的 比值 。缠 绕 过程 中 , 筒 的 长 度 是 由 纤 维 圆 纱 片 的 宽度 决 定 的 , 由于 设 计 的 时 候 一 般 只考 虑 圆 筒 在 力 学 上 的性能 , 不 是从生产 方面考 虑 , 而 因而 纤 维 缠 绕 的 角 度 和 设 计
1 玻 璃 钢 纤 维 缠 绕 工 艺 控 制
1 1 过 程 描 述 .
一 缠绕工 艺是把玻璃钢 的增 强材料——玻璃钢 纤维 , 通过 一 参 数 并 不 一 致 , 般 需 要 进 行 一 定 的修 正 才 能 获 得 实 际 的 缠 绕 参 数 , 现 密 切 的衔 接 。 实 个特 定的设备粘贴一定数量 的树脂 , 然后根据 一定的缠绕运动
要的成本较高 。
c e i a a h n n h r c e i t c 叨 .n a so h l P h m c l c i i gC a a t r s i s A n l ft e R , M C
1 9 ,2D 9 34 (
3 结 语 近年来新理论、 新技术 以及新工艺的不断涌现 , 使得 自由 曲
o u fc om to nEM I. n n,9 1138 fS raeFr a in i C [ JE gId18 ,0 () ] [] K ng ,idr af .uf G nr to i E e to 6 o i W Lne lup Sre e eea in n lcr — c
规律把浸胶 后的增强材料 缠绕到芯模 上, 形成 一个柔性玻璃 钢
一
般情 况下对缠 绕参数进行 设计修 正的方法有 2种 : 一是
另一个是通 半成品, 最后 固化 、 整理成成 品玻璃钢 的一 系列生产过程 。 玻璃 通 过停 留角 的修 正来保证纤维 片的宽度和缠绕 角, 钢 纤 维 丝 缠 绕 就 是 芯 模 围 绕 水 平 轴 匀 速 旋 转 , 丝 头 按 照 一 定 过修正 缠绕纤 维纱片 宽度和 缠绕 角度 来使 停 留角 度左 右得到 导 的速度 比沿芯模水平往 复运动 , 在芯模筒 身段和封头进行 交叉 保 持 。第 一 种 修 正 能确 保 圆 筒 中 间 部 分 最 大 可 能 地 接 近 设 计 标 但 特别 是在停 留角 的设计 缠 绕, 缠绕 的角度一般 是 4 。 5 。交叉缠绕 的特征就是 每一 准 , 它 的缺 点是对停 留角 影响较 大 , 5 ~7 。 不 韩要 会 块 缠绕 纤维纱都有一个对 应的切 点, 同一方 向相邻的纱线 之间 为 0的 时候 , 能 达 到 缠 绕 的 正 求 , 对 缠 绕 两 端 的 质 量
关 键 词: 璃钢 纤 维; 绕工 艺 ; 玻 缠 过程 控制
O 引 言
玻 璃 钢 产 品 因其 有 质 量 小 、 度 高 、 腐 蚀 、 命 长 等 一 系 强 耐 寿 列 优 势 , 广 泛 应 用 于 工 业 界 。纤 维 缠 绕 是 玻 璃 钢 成 型 工 艺 之 而
一
也有所不 同,这 就使导丝 头与芯模相对运动 的速度也不 一样 , 但它们之 间的移动速度都遵循 严格 的速度 比率 , 即导丝头往返
且要经过 预抛光 步骤 , 能够 实现 对非对 称 的 自由曲面、 才 球面 [] R jr a , zkJ e , 1 td fPleE eto 4 auk rKP o a , iBE a. uyo us lcr— K W l t S 和非球面等工件表面精加 工处理 。 此外 离子束抛光所用设 少转一个角度 。缠绕线型要 求
,
其所 需设备包括供 胶设备 、 线机 、 维张 力控制 设备 、 绕 纤 衬
纤 维 既 不 重 叠 也 不离 缝 , 是 均 匀 连 续 地 覆 盖 芯 模 表 面 。 而
12 缠 绕 过 程 校 正 .
里生产设备 、 固化设备 、 模设备和 后整理设备等 。 脱 想要生产标 准的玻璃钢制 品, 必须确保 在纤维缠绕过 程中包缠纱 路径的计 算和预定是一致 的, 以保证其准确性 。纤维缠绕工艺 是决定玻
面 模 具 精 整 加 工 技 术 不 断 发 展 。集 成化 、 能 化 、 性 化 和 网络 智 柔 业 进 步 应该 以提 高产 品质 量缩 小 加 工 成本 为发 展 方 向, 同时 还 要
[ ]C e t , r h ,a h k i h a O o eA p c s 5 h r y0VM t yRVG KR d a r s n n u nSm set
不 相 交 , 向不 同 的 纤 维 纱 就 会 相 交 。 方
造 成不利影 响。第二种修 正能最大 限度地 达到缠绕效果 , 在不
种校正算法使用频率 更高。
第二 缠绕 工艺和缠绕规则必须紧密结合结构设 计。随着产 品结 影响设计 的情 况下保证停 留角指标 的实现 。就 目前而言 , 构形状 和大小 的不 同, 片在芯模表面上 的安排 ( 纱 也称“ 线型
Gni h 堇 。yui 主 gy s J u
玻璃钢纤 维缠绕过程控制 系统研究
马 明博 韩 娜
( 州 中意 复合 材料 科 技有 限 公司 , 冀 河北 衡 水 0 3 0 ) 5 2 0 摘 要 : 绍 了玻璃 钢纤 维缠绕 的工 艺控制 , 介 总结 了缠绕 过程控 制 的策 略和 发展现 状 , 并对 未来 玻璃钢 制 品缠绕过 程控制 进行 了展望 。