LCF文件资料使用说明书
LCF电磁流量计产品说明书_V1.0
2.1、产品视图................................................................................................................................ 9 2.2、产品结构和尺寸图................................................................................................................9
第三章 基本操作与使用..........................................................................................20
3.1 概述........................................................................................................................................ 20 3.2 功能显示界面........................................................................................................................21 3.3 按键说明................................................................................................................................ 22 3.4 操作说明................................................................................................................................ 22 3.5 参数设置................................................................................................................................ 25 3.6 数字通讯接口及通讯协议.....................................................................................................31 3.7 电气隔离................................................................................................................................. 32 3.8 数字量输出及计算.................................................................................................................32
LCF文件使用说明
序言:Codewarrior 是飞思卡尔32位汽车级单片机Qorriva 系列的集成开发环境,与之前版本、完全兼容。
Codewarrior 是飞思卡尔最新的集成开发环境,是一个开放源代码的、基于Java 的可扩展开发平台。
许多新用户对codewarrior 链接文件不是十分了解,本文将针对链接文件的常见问题以及段的定义进行介绍帮助用户快速了解和使用CodeWarrior 。
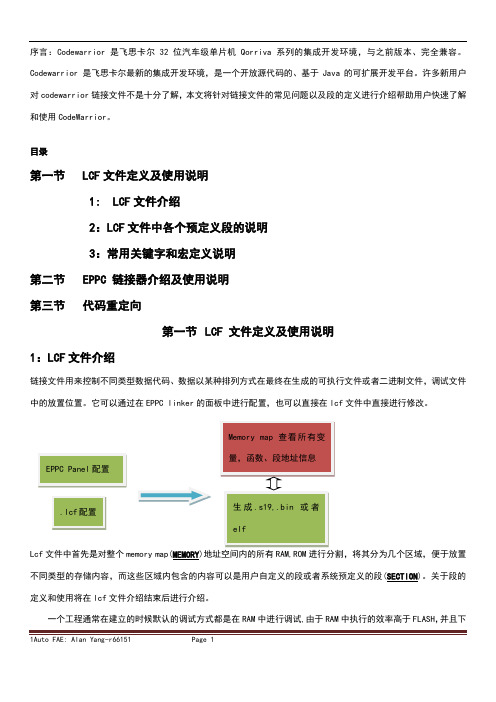
目录第一节 LCF 文件定义及使用说明1: LCF 文件介绍2:LCF 文件中各个预定义段的说明 3:常用关键字和宏定义说明第二节 EPPC 链接器介绍及使用说明 第三节 代码重定向第一节 LCF 文件定义及使用说明1:LCF 文件介绍链接文件用来控制不同类型数据代码、数据以某种排列方式在最终在生成的可执行文件或者二进制文件,调试文件中的放置位置。
它可以通过在EPPC linker 的面板中进行配置,也可以直接在lcf 文件中直接进行修改。
Lcf 文件中首先是对整个memory map(MEMORY )地址空间内的所有RAM,ROM 进行分割,将其分为几个区域,便于放置不同类型的存储内容,而这些区域内包含的内容可以是用户自定义的段或者系统预定义的段(SECTION )。
关于段的定义和使用将在lcf 文件介绍结束后进行介绍。
一个工程通常在建立的时候默认的调试方式都是在RAM 中进行调试,由于RAM中执行的效率高于FLASH ,并且下载速度快。
在生成的ROM Image中常量,初始化过的数据或者代码如果没有被定义在ROM区域则假设为这部分代码要在程序开始执行的时候从ROM去拷贝到RAM区。
下面是一个完整的lcf文件,其中包括每行的解释及用法。
/* lcf file for MPC5604B M27V (debug RAM version) 文件的名字及对应单片机(RAM版本) */{}”中是内容部分.init : {} nit_vle (VLECODE) : { nit) *(.init_vle)}} > init GROUP中的所有内容vor_branch_table (VLECODE) ALIGN (4096) : {} _exception_handlers (VLECODE) LOAD(_e_ivor_branch_table) : {}ext (TEXT) ALIGN(0x10) : {}.text_vle (VLECODE) ALIGN(0x10): {*(.text)*(.text_vle)}.rodata (CONST) : {*(.rdata)*(.rodata)}.ctors : {}.dtors : {}extab : {}extabindex : {}} > pseudo_romGROUP : {.__uninitialized_intc_handlertable ALIGN(0x10) : {}.data : {}.sdata : {}.sbss : {}.sdata2 : {}.sbss2 : {}.bss : {}} > internal_ram}/* Freescale CodeWarrior compiler address designations */_stack_addr = ADDR(stack)+SIZEOF(stack);3.常用关键字及使用说明关键字列表:1) SECTION2) ALIGN3) ADDR4) SIZEOF5) LOAD6) BIND7)Declspec8)pop, push9)FORCEACTIVE1)SECTIONSection使用pragma来将编译的目标代码放到预定义的段中,然后可以在LCF文件中将对应的段放到指定的地址区域。
IC-F7000快速说明书
IC-F7000中文说明书(快速中文说明)北京华诚广通科技有限公司/目录1.面板 (1)1.1 控制器面板 (1)1.2 主机面板 (2)1.3 麦克风 (2)1.4 LCD显示屏 (2)2.信道编程 (3)2.1 增加信道 (4)2.2 编辑已有信道 (4)2.3 删除信道 (5)3.ID编程 (5)3.1 进入初始设置 (5)3.2 Selcall选呼ID输入 (5)3.3 删除Selcall ID (6)3.4 ALE ID 码输入 (6)3.5 删除ALE ID 码 (6)4.话音接受或发送操作 (7)5.选呼操作 (7)5.1 选择信标呼叫 (7)5.2 选择呼叫 (7)5.3 ALE呼叫 (8)5.4 结束ALE呼叫 (9)5.5 ALE探测 (10)6.VFO〈频率〉方式 (11)6.1 CHANNEL /VFO 方式选择 (11)6.2 调整频率 (11)6.3 分频操作 (12)7.简易方式操作 (13)8.快速设置方式 (13)8.1 进入快速设置方式 (13)8.2 工作方式选择 (13)8.3 电台发射功率选择 (13)8.4 予放操作 (13)9.扫描 (13)9.1 进入扫描编辑 (14)9.2 打开、关闭扫描 (14)9.3 扫描组选择 (14)1.面板1.1 控制器面板电源按键:[I/O]按下,打开电源。
当电源已打开,快速按下[I/O],进入“快速设置方式”。
再次按下[I/O],退出“快速设置方式”。
按下约1秒钟,关电源。
静噪键:[MUTE]按下可选择静噪方式:话音静噪,信号电平静噪,选呼静噪。
调谐键:[TUNE]按下约一秒钟,启动手动调谐。
上/下键:[UP]/[DN]选择信道或设置方式的项。
扫描键:[SCAN]按下启动或停止扫描。
呼叫键:[CALL]按下进入呼叫菜单,再按退出。
按下约一秒钟发送呼叫。
1.2 主机面板1.3 麦克风[PTT]:按下讲话,释放接收。
[DN]/[UP]:下/上按键。
扫描机使用说明书1

声明本说明书的最终解释权归深圳市思瑞精密机器有限公司。
本产品的任何改动之处,恕不另行通知。
未经本公司的书面授权,本说明书禁止以任何形式进行复制。
目录前言-----------------------------------------------------3第一章注意事项-----------------------------------4第二章系统简介-----------------------------------6第三章软件使用-----------------------------------8第四章操作实例-----------------------------------21第五章故障对策-----------------------------------28附录一主要性能指标附录二验收标准前言近年来,随着制造技术的飞速发展,一种新的制造概念改变了以前传统制造业和工艺过程。
这种新的制造思路是:首先为产品设计出外观新颖且符合空间要求的模型,再对现有的产品模型进行实测,获得物体的三维形状数据信息,再进行数据重构,建立其CAD数据模型。
设计人员可在CAD模型上再进行改进和创新设计,该数据可直接输入到快速成型系统或形成加工代码输入到数控加工系统,生成现实产品或其模具,最后通过实验验证,产品定型后再投入批量生产。
这一过程被称为逆向工程,该系统使产品的设计开发周期大为缩短。
逆向工程系统可分为三部分:即数据的获取与处理系统,数据文件自动生成系统及自动加工成型系统。
其中物体三维轮廓数据的准确获取是整个逆向工程的关键所在。
目前国内外在物体三维数据测量方面采用的方法分为接触式和非接触式两种。
虽然目前多数采用的接触式测量具有精度高、可靠性强等优点,但其速度慢、磨损测量面、需对探头半径做补偿及无法对软质物体做工精确测量等缺点,使该技术应用受到诸多限制。
而非接触式线激光扫描,具有精度高,速度快,对工件无磨损,易装夹,易操作等优点,可广泛应用于汽车、摩托车、电子通讯、玩具、工艺品等行业。
电磁流量计lcf说明书

LCF 电磁录
1、产品特点及工作原理.................................................................................................................. 2 1.2 工作原理...............................................................................................................................3
3.1 执行标准...............................................................................................................................4 3.2 基本参数与性能指标...........................................................................................................4 3.21 流量计与传感器.................................................................................................................4 3.2.2 转换器...............................................................................................................................4 4、产品外型及安装尺寸.................................................................................................................. 5 4.1 分体型电磁流量转换器尺寸图........................................................................................... 5 4.2 电磁流量传感器尺寸图...................................................................................................... 6 5、仪表安装.......................................................................................................................................7 5.1 安装前的准备......................................................................................................................7 5.1.1 机械考虑..........................................................................................................................7
LCF安装使用说明书
LCF安装使用说明书LCF安装使用说明书本文档旨在提供详细的LCF安装和使用指南。
请按照以下章节逐步操作,以确保正确地安装和使用LCF软件。
1:硬件要求在开始安装LCF之前,请确保满足以下最低系统要求: - 操作系统:Windows 10或更高版本- 处理器:Intel Core i5或更高版本- 内存:8GB或更高- 存储空间:至少20GB可用空间2: LCF安装包访问官方网站()并找到页面。
在该页面上,选择适用于您的操作系统的最新版本,并按钮。
完成后,解压缩安装包。
3:运行安装程序打开解压缩后的安装包,并双击运行安装程序。
根据安装提示,选择安装语言和安装路径。
默认情况下,LCF将安装在“C:\\Program Files\\LCF”目录中。
4:安装LCF“下一步”按钮开始安装过程。
请仔细阅读并接受软件许可协议。
选择安装类型(推荐选择完整安装)和其他可选组件,然后“下一步”继续。
5:配置LCF在安装过程中,您将被要求选择数据库类型和连接详细信息。
根据您的需求,选择适当的选项并提供所需的信息。
然后,“下一步”继续。
6:完成安装“安装”按钮,开始安装LCF。
安装过程可能需要一段时间,请耐心等待。
安装完成后,“完成”按钮退出安装程序。
7:启动LCF在桌面上找到LCF的快捷方式,并双击打开。
如果没有桌面快捷方式,请在安装目录中找到LCF的可执行文件并运行。
8:注册和激活首次启动LCF时,您将需要提供产品密钥。
在注册页面上输入您的产品密钥,并按照指示完成注册和激活过程。
9:使用LCF熟悉LCF的界面和功能。
阅读LCF用户手册以了解如何使用不同的功能和工具。
附件:本文档不涉及附件。
法律名词及注释:1:软件许可协议:一种法律文件,规定了用户在使用软件时需遵循的条款和条件。
2:数据库类型:指软件使用的数据库的种类,如MySQL、Oracle等。
3:产品密钥:一种唯一的序列号,用于验证并激活软件的合法性。
0i-F标准连接调试手册
1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 FS 0i-D αi 放大器+串行主轴 FS 0i Mate-D βi 一体放大器+串行主轴 FS 0i Mate-D βi 单体放大器(20A/40A/80A)+模拟主轴 FS 0i Mate-D βi 双轴放大器+模拟主轴 FS 0i Mate-D βi 单体放大器(80A/80A/80A)+串行主轴(Pakage5,钻削中心专用) FS 31iB-D 31iB 放大器+串行主轴 FS 0i-D 31iB 放大器+串行主轴 FS 0i-F βi-B 一体型放大器+串行主轴 FS 0i-F 31iB 放大器+串行主轴
-1-
第一部分 基础连接调试 第一章 硬件连接使用说明
目
1.
录
第一章 硬件连接使用说明................................................................................................................. - 2 0i-D、0 i -Mate-D、31iB、0i-F 常见机型整体硬件连接 ............................................................ - 3 1.1 1.2 1.3 1.4 1.5 1.6 1.7 1.8 1.9 2. 3. FS 0i-D αi 放大器+串行主轴........................................................................................... - 3 FS 0i Mate-D βi 一体放大器+串行主轴 .......................................................................... - 3 FS 0i Mate-D βi 单体放大器(20A/40A/80A)+模拟主轴 ............................................. - 3 FS 0i Mate-D βi 双轴放大器+模拟主轴 .......................................................................... - 3 FS 0i Mate-D βi 单体放大器(80A/80A/80A)+串行主轴(Pakage5,钻削中心专用) ... - 3 FS 31iB-D 31iB 放大器+串行主轴 .................................................................................. - 3 FS 0i-D 31iB 放大器+串行主轴 ...................................................................................... - 3 FS 0i-F βi-B 一体型放大器+串行主轴 ........................................................................... - 3 FS 0i-F 31iB 放大器+串行主轴 ....................................................................................... - 3 -
LC中文说明书
再按“”弹出
如为最后一级菜单,界面不会出现黑色滚动条,按返回键“RT”返回上级菜单
或主界面。如在某一界面停止操作,数秒钟后自动返回主界面。
用“”、“”移动键、确认键“”和返回键“RT”根据上述方法可完全观察
到运行时间、本次运行时间、维护参数、历史故障、出厂日期、现场故障等运行参数
并返回到上级菜单。
断相保护时间
0005
缺相时间设定≥20秒时,缺相不起作用。如不平衡保护起作用,不平衡保护会动作。
过载重启延时
0000分钟
如电机过载停机,为避免电机频繁启动,无论掉电或复位都要经过此延时才能开机
出厂日期
****年**月**日
厂家输入设备的出厂日期
出厂编号
******
厂家输入设备的出厂编号
9、控制器指示灯说明
当环境温度低于10℃时的首次启动,应先把PLC控制器设为手动
模式启动进行空载运转5分钟预热机器,再停机改变PLC控制器为自
动加载模式后进入正常运行!
二、控制面板说明及操作(SEC微电脑专用控制器)
1、通电:按说明书接线并检查无误后接通电源,把红色停止按钮往顺时针方向转动通电。通电后,画面首先显示“申行健”,5秒后进入现场主画面,显示现场温度,压力值以及故障状态,如无任何故障,显示屏底部将显示当前时间。如有故障将显示故障的名称,启动前应首先排除故障。开机2分钟后或停止按键操作2分钟后,背光电源关断,按“RT”键背光将再次点亮。
尊敬的用户:
首先,我们感谢您选购SUCCESS ENGINE公司的SE系列螺杆式空气压缩机。
本公司的产品在出厂之前均已经过严格的检验和测试,但为了确保机器安全、可靠、耐久地投入运行,请您务必在使用本机器之前详细阅读本说明书,充分掌握该螺杆压缩机组操作规范和技能,使其设备长期处于良好的工作状态。
LCF文件使用说明
LCF文件使用说明一、概述LCF(Library Configuration File)文件是C/C++编译器中的一个配置文件,用于控制编译器对库文件的查找和链接过程。
LCF文件可以指定编译器在编译和链接过程中使用的库文件的路径、库文件的链接顺序和库文件的链接方式等信息。
本文将详细介绍LCF文件的使用方法。
二、LCF文件的语法1. search_dir:指定库文件的路径。
语法为search_dir dir_name,其中dir_name为库文件的路径。
2. input:指定要链接的库文件。
语法为input lib_name,其中lib_name为要链接的库文件名。
3. group:将一组库文件链接为一个模块。
语法为group(lib_name1,lib_name2,...,lib_namen),其中lib_name1到lib_namen为要链接的库文件。
4. link:指定库文件的链接方式。
语法为link type,其中type为链接方式。
常用的链接方式有static、dynamic和auto。
5. output:指定输出文件名。
语法为output file_name,其中file_name为输出文件名。
三、LCF文件的使用方法使用LCF文件可以有效地管理代码中使用到的库文件,减少编译和链接过程中的错误和冗余。
下面是LCF文件的使用方法:3. 使用LCF文件:在编译和链接代码时,使用-lcf选项指定LCF文件。
gcc -o output_file source_file.c -lcf lcf_file_name.lcf四、LCF文件的示例下面是一个LCF文件的示例:search_dir /usr/libinput lib1input lib2group(lib3, lib4, lib5)link staticoutput my_output在这个示例中,首先通过search_dir命令指定库文件的路径为/usr/lib。
LCF-U超声流量计使用说明书
LCF-U 超声流量计使用说明书
一、简介
LCF-U 超声流量计是山东力创科技股份有限公司针对我国水质自主开发、设计的一款新 型计量产品,其采用超声波测流技术,外形美观、精度高、压损低、可靠性高、数据采集多 样化,优越的性能目前在国内处于领先水平。
LCF-U 超声流量计技术指标:DN15-DN600。环境等级:B。准确度等级:1 级
2.1、LCF-U 超声流量计的构成................................................................................................. 4 2.2、产品组成图........................................................................................................................4
4
LCF-U 超声流量计使用说明书
3.1、主要功能 瞬时流量计量显示 累计流量计量及显示 运行时间记录及显示 日期显示 电源状态自动监测 信号自诊断功能 故障状态记录、显示 可查询历史流量记录数据 加密保护参数和数据
三、主要功能及特点
3.2、主要特点 符合《CJT 3063-1997》设计标准; 存储最近 24 个月的数据,并能查询;数据掉电不丢失; 具有软件加密功能,防止仪表有效数据被更改; 自诊断功能,超声信号强度检测; 低始动流量,高准确度; 进口原材料选用,保证了产品计量的准确性、稳定性和可靠性; 采用超声测流技术,不受磁场干扰,无机械转动部件,无磨损,可靠性高,维护量小; 采用直管式结构,压损小,不堵塞,适合我国水质; 操作界面清晰有良好的透明度,使用磁控按键,方便读数和抄表; 全新防护技术,防护等级 IP68; 可方便更换电池; 水平、竖直安装;
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
序言:Codewarrior 2.10是飞思卡尔32位汽车级单片机Qorriva 系列的集成开发环境,与之前版本2.8、2.9完全兼容。
Codewarrior 10.3是飞思卡尔最新的集成开发环境,是一个开放源代码的、基于Java 的可扩展开发平台。
许多新用户对codewarrior 链接文件不是十分了解,本文将针对链接文件的常见问题以及段的定义进行介绍帮助用户快速了解和使用CodeWarrior 。
目录第一节 LCF 文件定义及使用说明1: LCF 文件介绍2:LCF 文件中各个预定义段的说明3:常用关键字和宏定义说明第二节 EPPC 链接器介绍及使用说明第三节 代码重定向第一节 LCF 文件定义及使用说明1:LCF 文件介绍链接文件用来控制不同类型数据代码、数据以某种排列方式在最终在生成的可执行文件或者二进制文件,调试文件中的放置位置。
它可以通过在EPPC linker 的面板中进行配置,也可以直接在lcf 文件中直接进行修改。
Lcf 文件中首先是对整个memory map(MEMORY )地址空间内的所有RAM,ROM 进行分割,将其分为几个区域,便于放置不同类型的存储内容,而这些区域内包含的内容可以是用户自定义的段或者系统预定义的段(SECTION )。
关于段的定义和使用将在lcf 文件介绍结束后进行介绍。
一个工程通常在建立的时候默认的调试方式都是在RAM 中进行调试,由于RAM 中执行的效率高于FLASH ,并且下载速度快。
在生成的ROM Image 中常量,初始化过的数据或者代码如果没有被定义在ROM 区域则假设为这部分代码要在程序开始执行的时候从ROM 去拷贝到RAM 区。
下面是一个完整的lcf 文件,其中包括每行的解释及用法。
/* lcf file for MPC5604B M27V (debug RAM version) 文件的名字及对应单片机(RAM 版本) */ //RAM 版本和ROM 版本的区别在于RAM 版本不将程序下载到ROM 中去,而在RAM 中执行程序/* 512KB Flash, 32KB SRAM */ //单片机的FLASH 和SRAM 大小MEMORY 下面是对单片机存储空间的定义,不同的段的起始地址,不能叠加地址空间{pseudo_rom:(仿真ROM区) org = 0x40000000, (开始地址) len = 0x00003000(长度)init: org = 0x40004000, len = 0x00001000 //初始化段所在位置exception_handlers: org = 0x40005000, len = 0x00001000 //中断向量所在地址internal_ram: org = 0x40006000, len = 0x00001800 //内部RAM的起始地址heap : org = 0x40007800, len = 0x00000400 //堆的起始地址stack : org = 0x40007C00, len = 0x00000400 //栈的起始地址}SECTIONS段的定义{GROUP : { // 它的定义需要遵从本例程方式”GROUP:{}” .“{}”中是内容部分.init : {} //.init段中所有内容。
.init_vle (VLECODE) : { //.init_vle(使用VLE代码)*(.init)*(.init_vle)}} > init //可以参看前面的init段在存储空间的定义.本GROUP中的所有内容//放在init段中,”>”代表放在哪个段GROUP : {.ivor_branch_table (VLECODE) ALIGN (4096) : {} //ALIGN(4096)按照4096字节对齐 .__exception_handlers (VLECODE) LOAD (_e_ivor_branch_table) : {}// LOAD()将本段加载到指定地址} > exception_handlersGROUP : {.text (TEXT) ALIGN(0x10) : {}.text_vle (VLECODE) ALIGN(0x10): {*(.text)*(.text_vle)}.rodata (CONST) : {*(.rdata)*(.rodata)}.ctors : {}.dtors : {}extab : {}extabindex : {}} > pseudo_romGROUP : {.__uninitialized_intc_handlertable ALIGN(0x10) : {}.data : {}.sdata : {}.sbss : {}.sdata2 : {}.sbss2 : {}.bss : {}} > internal_ram}/* Freescale CodeWarrior compiler address designations */_stack_addr = ADDR(stack)+SIZEOF(stack); //ADDR()是取括号内段的首地址//SIZEOF()是求某段的长度_stack_end = ADDR(stack); //详见第3小节_heap_addr = ADDR(heap);_heap_end = ADDR(heap)+SIZEOF(heap);/* Exceptions Handlers Location (used in Exceptions.c for IVPR initialization) */EXCEPTION_HANDLERS = ADDR(exception_handlers);2.LCF文件中预定义的各个段的名称及解释3.常用关键字及使用说明关键字列表:1) SECTION2) ALIGN3) ADDR4) SIZEOF5) LOAD6) BIND7)Declspec8)pop, push9)FORCEACTIVE1)SECTIONSection使用pragma来将编译的目标代码放到预定义的段中,然后可以在LCF文件中将对应的段放到指定的地址区域。
Section和__declspec(section)都可以用来指定一个段,但是不能同时使用语法#pragma section [ objecttype | permission ][iname][uname][data_mode=datamode][code_mode=codemode]参数objecttype可以是以下三种选项,用来指定将目标数据放在哪里∙code_type –可执行目标类型∙data_type –非常量数据,包含比small data大的数据∙sdata_type –非常量数据,包含比small data小或者等同的数据。
∙const_type –常量数据,包含比small const大的数据∙sconst_type –常量数据,包含小或者等同small data的数据∙all_types –所有数据和代码permission定义访问权限,包含下列三个选项∙R –只读∙W –可写∙X –可执行iname定义段的名字,编译器存储初始化过的目标。
变量在定义的时候被初始化过的,函数和字符串也属于初始化过的目标。
The iname parameter may be of the form .abs.xxxxxxxx where xxxxxxxx is an 8-digit hexadecimal number specifying the address of the section.uname定义段的名字,编译器存储未被初始化过的目标。
下面是例子#pragma push // 保存当前状态#pragma section ".data" "COMM"int red;int sky;#pragma pop // 恢复之前的状态data_mode=datamode为编译器指定使用哪种数据模式下面是可选的数据模式∙near_abs –目标必须在16位地址空间∙far_abs –目标必须在32位RAM地址空间∙sda_rel –目标必须在链接器为small data定义的32K 地址空间.code_mode=codemode向编译器指定地址模式下面是可选的三种地址模式:∙pc_rel –被调用子函数地址必须在调用函数24位地址空间范围内∙near_abs –函数地址必须在24位地址范围∙far_abs -函数地址必须在32位地址范围内预定义的段和默认模式Type Name Data mode Code modecode_type ".text" data_mode=far_abs c ode_mode=pc_reldata_type ".data" data_mode=far_abs c ode_mode=pc_rel const_type ".rodata" data_mode=far_abs c ode_mode=pc_rel sdata_type ".sdata" data_mode=sda_rel c ode_mode=pc_rel sconst_type ".sdata2" ".sbss2" data_mode=sda_rel c ode_mode=pc_rel ".PPC.EMB.sdata0" ".PPC.EMB.sbss0" d ata_mode=sda_rel c ode_mode=pc_rel2)ALIGN按照指定的边界进行排列,必须是2的整倍数。
SECTIONS{GROUP:{.init ALIGN(0x1000) : {}.text ALIGN(0x1000) : {}} > text}例子中定义了两个段:.init和.text。
在运行的时候每个段都会被放在下一个可以使用的地址(可以被0x1000整除)3)ADDR返回指定名称的段或者内存区域的开始地址.ADDR(sectionName | segmentName)参数sectionName文件中段的标志符segmentName存储区域中段的标志符范例下面代码中使用的ADDR功能来将ROOT的地址赋值给__rootbasecode .列举ADDR() 功能MEMORY{ROOT : origin = 0x80000400, length = 0}SECTIONS{.code :{__rootbasecode = ADDR (ROOT);*.(text);} > ROOT}返回指定Section或者segment的大小(以字节为单位)SIZEOF(segmentName | sectionName)参数segmentNamesegment的名字;必须以“.”作为起始。