基于片内PID补偿器的高压大功率Buck变换器设计
BUCK型开关变换器最优PID控制器设计_马红波

取状 态 变 量 x = [ iL vC ] T, 输 出 变 量 y = [ iin vo ] T, 输入向量为 u = [ vin ] , 由状态空间平均
法得到 BUCK变换器状态空间平均方程为
xÛ= Ax + Bu,
yÛ= Cx+ Eu。
( 1)
其中:
A=
- (RRC /L (RC + R)+ RL /L+ (1- d)RS2 /L+ dRS1 /L) -R /L (RC + R)
#y^ = C x^ + E v^ in + ( C1 - C 2 )X d^,
( 3)
其中: V in和 V0 分别为输入输出电压稳态值, D 为占
空比稳态值。
1 /L
0
10
B1 =
0
, B2 =
0 , C1 - C 2 =
0
, 0
X = - A - 1B U。
对小信号状态方程进行拉氏变换, 最终得到与
第 6期
BUCK型开关变换器最优 P ID 控制器设计
641
决于其是否过阻尼 )。而临界比例度 法、衰减曲线
法等实验法又很难掌握, 需要一定的经验。在开关
变换器领域, 一直采用频率设计法。频率设计法最 大的缺点是以频域指标为目标进行设计, 尽管频域
BUCK电路的PID控制设计及仿真

BUCK电路的PID控制设计及仿真BUCK电路的PID控制设计⼀、实验⽬的DC/DC 变换器可将不可控的直流输⼊变为可控的直流输出,⼴泛应⽤于可调直流开关电源及直流电机驱动中. Buck 变换器是DC/DC 变换器中最具代表性的拓扑结构之⼀.在⼯程实际中, Buck变换器的控制⽅式可以开环和闭环来实现。
其中闭环控制⽅式⼜可分为PI校正,PID控制,fuzzy控制等⽅式。
本⽂⾸先会建⽴Buck 变换器的模型,然后会分别进⾏开环、PI控制器校正,PID控制器校正,并在MATLAB/SIMULINK上进⾏仿真,最后对得出的结果进⾏⽐较。
⼆、设计内容及要求U):24V( 20%)1、输⼊电压(iU):12V(1%稳定度)2、输出电压(oI):1A3、额定电流(oV≤70mV4、输出电压纹波峰-峰值ppV≤150mV 6、开关5、满载与半载之间的切换时,输出电压纹波峰-峰值pp频率(f):⽆要求,本设计设定为20kHz三、Buck 主拓扑电路3.1开环Buck 电路图图(1)开环Buck 电路3.2 参数计算与选择(1)占空⽐ 50%o i U D U == (2)滤波电感滤波电感的选择与负载电流的变化范围及希望的⼯作状态有关,假设电路要求⼯作在电感电流连续⼯作状态,则临界电感(1)2f o s oD U L I -= 根据公式代⼊计算可得:-4s (1)(10.5)*12 1.5*102f 2*20000o o U D L H I --===此时L 值为电感电流连续与否的临界值,实际电感值可选为(2~3)倍的临界电感。
这⾥L 取4*104H 。
(3)滤波电容电容的容量,会影响输出纹波电压和超调量的⼤⼩。
在开关关断时为负载供电和减⼩输出电压的纹波,滤波电容C 的选择直接关系开关稳压电源输出中纹波电压分量o U ⼤⼩。
滤波电容C2(1)8o o U D C U Lf-= 根据纹波要求代⼊计算-42-442(1)12*0.5==1.79*1088*0.07*1.5*10*(2*10)o o U D C U Lf -= F 这⾥电容C 取7.5*104F 。
电力电子课程设计 Buck变换器设计 精品
电力电子技术课程设计题目Buck变换器设计Buck变换器设计1 引言目前,各种资料都显示,同步整流技术是近几年研究的热点,主要应用于低压大电流领域,其目的是为了解决续流管的导通损耗问题。
采用一般的二极管续流,其导通电阻较大,应用在大电流场合时,损耗很大。
用导通电阻非常小的MOS管代替二极管,可以解决损耗问题,但同时对驱动电路提出了更高的要求[1]。
此外,对Buck电路应用同步整流技术,用MOS管代替二极管后,电路从拓扑上整合了Buck和Boost两种变换器,为实现双向DC/DC变换提供了可能。
直流电机是人们最先发明、认识和利用的电机,它具有调速范围广,且易于平滑调节,过载、起动、制动转矩大,易于控制,且控制装置的可靠性高,调速时的能量损耗小等优点,在高精度的位置随动系统中,直流电机占据着主导地位[2]。
但是,要将一直流电变为另一固定电压或可调电压的直流电就要用到直流-直流变流电路。
改变电枢电源电压调速,当电枢电源电压U改变为U U+∆时,理想空载转速,从而导致转速的变化,由于只有0n变化而β未变,故电动机的机械特性硬度不变,因此,即使电动机在低速运行时,转速随负载变动而变化的幅度小,即转速稳定性好,具有调速平滑性好,即可实现无级调速,且附加能量消耗较小,调速效率高。
但由于最高电枢电压受额定电压限制,一般只能实现从基速往下进行调节。
因此,这种调速方法在直流电力拖动系统中被广泛应用[3]。
2 PWM控制要实现buck变换器的功能,必须要用到PWM控制,它在闭环回路中起着不可或缺的作用。
本次设计中,用到的PWM控制芯片是SG3525.2.1 PWM控制芯片SG3525功能简介SG3525系列脉宽调制器控制是电流控制型PWM控制器。
在脉宽比较器的输入端直接用流过输出电感线圈的信号与误差放大器输出信号进行比较,从而调节占空比使输出的电感峰值电流跟随误差电压变化而变化。
由于结构上有电压环和电流环双环系统,因此,无论开关电源的电压调整率、负载调整率和瞬态响应特性都有提高,是目前比较理想的新型控制器。
BUCK电路PID控制器设计及仿真
BUCK 电路PID 控制器设计及仿真本文在BUCK 电路传递函数的基础上对BUCK 电路的开环特性进行了分析,并利用MATLAB 的SISOTOOL 工具箱设计了PID 控制器,然后用以运放为核心搭建了PID 控制器硬件电路,最后在PSIM 上对BUCK 电路进行闭环仿真。
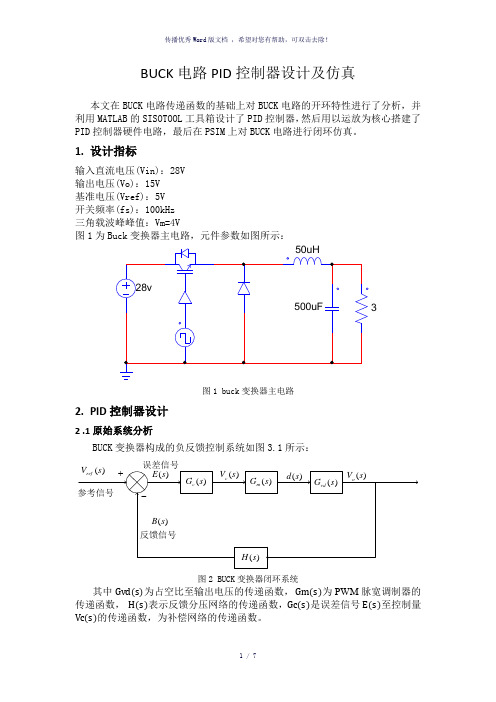
1. 设计指标输入直流电压(Vin):28V 输出电压(Vo):15V 基准电压(Vref):5V 开关频率(fs):100kHz 三角载波峰峰值:Vm=4V图1为Buck 变换器主电路,元件参数如图所示:3图1 buck 变换器主电路2. PID 控制器设计2 .1原始系统分析BUCK 变换器构成的负反馈控制系统如图3.1所示:图2 BUCK 变换器闭环系统其中Gvd(s)为占空比至输出电压的传递函数, Gm(s)为PWM 脉宽调制器的传递函数, H(s)表示反馈分压网络的传递函数,Gc(s)是误差信号E(s)至控制量Vc(s)的传递函数,为补偿网络的传递函数。
本系统中,PWM 调制器的传递函数为:ˆ1ˆ4m c m d(s)1G (s)== =v (s)V (1)式中,Vm 为PWM 调制器中锯齿波的幅值。
反馈分压网络的传递函数为:Hs=VrefVo=515=13(2)占空比至输出电压的传递函数为:Gvds=VoD11+sLR+s2LC(3)其中Vo=15V ,D=VVin=1528=0.536,L=50μH ,R=3Ω,C=500μF 。
将参数代入式(3)可得,Gvds=282.533×10-8s2+1.675×10-5s+1 (4) 对于BUCK 变换器系统,其回路增益函数G(s)H(s)为 GsHs=GcsGmsGvdsHs=GcsGos (5) 式中,Gos=GmsGvdsHs(6)为未加补偿网络Gcs 时的回路增益函数,称为原始回路增益函数,将式子(1)、(2)、(4)可得本系统中原始回路增益函数Gos=283.04×10-7s2+ 0.000201s+1 (7)根据式(7)可做出系统原始回路增益函数波特图如图3所示:图3 原始回路增益函数波特图从图3中可以看出穿越频率为fc=1.82kHz ,相位裕度为ψm=4.72deg ,从表面上看,系统是稳定的,但是如果系统中的参数发生变化,系统可能会变得不稳定;另外穿越频率太低,系统的响应速度很慢。
BUCK变换器设计

BUCK变换器设计BUCK变换器设计报告⼀、BUCK变换器原理降压变换器(Buck Converter)就是将直流输⼊电压变换成相对低的平均直流输出电压。
它的特点是输出电压⽐输⼊的电压低,但输出电流⽐输⼊电流⾼。
它主要⽤于直流稳压电源。
⼆、BUCK主电路参数计算及器件选择1、BUCK变换器的设计⽅法利⽤MATLAB和PSPICE对设计电路进⾏设计,根据设计指标选取合适的主电路及主电路元件参数,建⽴仿真模型,并进⾏变换器开环性能的仿真,再选取合适的闭环控制器进⾏闭环控制系统的设计,⽐较开环闭环仿真模型的超调量、调节时间等,选取性能优良的模型进⾏电路搭建。
2、主电路的设计指标输⼊电压:标称直流48V,范围43~53V输出电压:直流24V,5A输出电压纹波:100mV电流纹波:0.25A开关频率:250kHz相位裕量:60°幅值裕量:10dB3、BUCK主电路主电路的相关参数:开关周期:T S=s f1=4×10-6s占空⽐:当输⼊电压为43V时,D max=0.55814当输⼊电压为53V时,D min=0.45283 输出电压:V O=24V 输出电流I O=5A纹波电流:Δi L=0.25A纹波电压:ΔV L=100mV电感量计算:由Δi L=2L v-V omax-in DT S得:L=L o max -in i 2v -V ΔD min T S=25.022453?-×0.4528×4×10-6=1.05×10-4H 电容量计算:由ΔV L =C i L 8ΔT S 得:C=L LV 8i ΔΔT S =1.0825.0?×4×10-6=1.25×10-6F ⽽实际中,考虑到能量存储以及输⼊和负载变化的影响,C 的取值⼀般要⼤于该计算值,故取值为120µF 。
实际中,电解电容⼀般都具有等效串联电阻,因此在选择的过程中要注意此电阻的⼤⼩对系统性能的影响。
buck型变换器数字pid控制器设计方法研究

buck型变换器数字pid控制器设计方法研究首先,我们介绍 Buck变换器的概念。
Buck变换器是一种常见电路,用于将高电压输入分解成较低的电压输出。
它通常包括一个半桥逆变器、一个控制电路和一个变换器芯片。
这种结构使得Buck型变换器具有调节输出电压和电流的功能,因此可以用来实现智能控制和自动化控制。
Buck型变换器具有良好的负载调节能力,而且不受消耗的影响。
其次,本文详细介绍了如何使用buck型变换器实现数字PID控制。
首先,将Buck型变换器接入现有的设备电路,然后利用芯片控制器将PID参数参数化,并经过反馈迅速调节输出电压。
其次,本文还介绍了如何利用Buck型变换器实现实时数字PID控制,其基本原理是通过检测负载参数,计算出PID的控制量,并对输出电流进行修正。
最后,本文介绍了如何在Buck型变换器上使用数字PID控制器实现智能控制。
在实现这种智能控制的过程中,需要确定关键参数,然后将这些参数输入到控制器中,实现智能控制。
本文基于以上技术,可以指导实际应用中如何使用Buck型变换器实现数字PID控制。
首先,要明确利用Buck型变换器来实现数字PID控制的目标,然后根据不同的应用场景和相应的负载要求来选择合适的参数,并确定合适的控制策略。
接着,通过控制器设计并编程,实现控制策略,实现高精度、低消耗、高灵活性的控制效果。
此外,通过分析实验结果,可以对控制策略进行相应的调整,以达到实际应用的最佳效果。
本文介绍了 Buck变换器数字PID控制器设计方法研究。
如今,基于Buck型变换器的数字PID控制器被广泛应用于智能控制、实时调节等领域,为实现精确控制和节能减排发挥了重要作用。
因此,对Buck型变换器数字PID控制器技术的研究将有助于进一步拓展其应用范围,从而为实现智能控制、节能减排等科学目标做出重要贡献。
基于抗饱和PI调节器的BUCK变换器的设计与实现

基于抗饱和PI调节器的BUCK变换器的设计与实现作者:江澜蔡文来源:《上海师范大学学报·自然科学版》2013年第01期摘要:基于DSP设计并实现了一种抗饱和的数字PI调节器,将其应用于BUCK变换器的电压、电流双闭环系统设计中,并在一台功率为5.5KW的实验样机上进行了实验研究.实验结果表明:该变换器具有良好的静态、动态性能,验证了该PI调节器设计的有效性.关键词:双闭环; PI调节器; BUCK变换器中图分类号: TP 272文献标识码: A文章编号: 1000-5137(2013)01-0020-050引言PID控制是发展最早、应用最广的一种控制策略,由于其算法简单、鲁棒性较好、可靠性高,被广泛应用于各类工业控制的算法设计中[1-2],特别在不完全了解一个系统或被控对象的实际参数,或不能通过有效的测量手段来获得准确的系统参数时,往往采用PID控制[2].在电力电子变换器的设计中,由于系统本身是一个非线性、时变系统,因而常常采用PID 控制器进行设计.在实际应用中,由于系统对快速性的要求不那么高,因而在系统设计中常常采用PI调节器[1].在PI调节器的设计中,若PI算式中的积分量积累了过大数值,以至于超出执行元件的极限能力,就会出现积分饱和现象[1-2],进而影响系统性能.本文作者基于TI公司的DSP2812设计并实现了一种抗饱和的数字PI调节器,将其应用于BUCK变换器的控制中,采用电流、电压双闭环控制[3],取得了良好的动、静态性能.4结论由于PID参数直接影响着控制效果的好坏,本文作者采用工程整定方法,依赖工程经验,直接在控制系统的实验中进行PI参数整定[2],方法简单、调整方便.将有抑制饱和积分功能的PI调节器运用于BUCK变换器的电压外环、电流内环的设计中,起到了稳压限流的作用,系统取得了良好的动、静态性能[6].实验结果验证了设计的有效性.参考文献:[1]ALI E,ALIREZA K,ZHONG N,et al.连晓峰译.集成电力电子变换器及数字控制 [M].北京:机械工业出版社,2011.[2]白志刚.自动调节系统解析与PID整定 [M].北京:化学工业出版社,2012.[3]BUTI B,NAGY I.Stability analysis of PWM-controlled dual channel resonant buck converter using PI controller [C]∥IEEE SPEEDAM 2006,Palazzodei Congressi Taormina:IEEE Inc,2006:208-213.[4]杜飞,林欣.电力电子技术的MATLAB仿真 [M].北京:中国电力出版社,2009.[5]曹霞,关振宏,黄栋杰,等.Buck变换器在Matlab/Simulink下的仿真研究 [J].电器开关,2009,47(6):23-25.[6]BRADLEY M,ALARCON E,FEELY O.Analysis of limit cycles in a PI digitally controlled buck converter [C]∥IEEE ISCAS 2012,Seoul:IEEE Inc,2012:628-631.(责任编辑:包震宇)。
Buck-Boost变换器本科毕业设计论文

本科毕业设计(论文)摘要在很多需要DC-DC变换的系统,往往需要研制一种宽电压输入范围的DC/DC 变换器电源。
在充分考虑不同DC/DC变换器拓扑特点的基础上,本文选用了Buck-Boost作为系统的主电路拓扑。
本文介绍了Buck-Boost电路的工作原理,建立了理想Buck-Boost模型,对整个电路进行了主电路参数设计,并在此基础上进行了电压电流闭环参数设计的研究,实现了控制理论中零极点补偿法在电力电子中的应用,。
接着,本文在protel 中进行了原理图和PCB图的设计,在设计的硬件电路上进行了测试实验。
为了使系统能够在宽电压输入范围内稳定正常工作,本文实现了提出的闭环参数设计方法,指出了该方法的优点,并通过实验验证了该方法的正确性。
关键词:Buck-Boost;DC/DC变换器本科毕业设计(论文)毕业论文(设计)原创性声明本人所呈交的毕业论文(设计)是我在导师的指导下进行的研究工作及取得的研究成果。
据我所知,除文中已经注明引用的内容外,本论文(设计)不包含其他个人已经发表或撰写过的研究成果。
对本论文(设计)的研究做出重要贡献的个人和集体,均已在文中作了明确说明并表示谢意。
作者签名:日期:毕业论文(设计)授权使用说明本论文(设计)作者完全了解**学院有关保留、使用毕业论文(设计)的规定,学校有权保留论文(设计)并向相关部门送交论文(设计)的电子版和纸质版。
有权将论文(设计)用于非赢利目的的少量复制并允许论文(设计)进入学校图书馆被查阅。
学校可以公布论文(设计)的全部或部分内容。
保密的论文(设计)在解密后适用本规定。
作者签名:指导教师签名:日期:日期:本科毕业设计(论文)注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
签名:
日期:
年
月
日
关于论文使用授权的说明
本学位论文作者完全了解电子科技大学有关保留、使用学位论文 的规定, 有权保留并向国家有关部门或机构送交论文的复印件和磁盘, 允许论文被查阅和借阅。本人授权电子科技大学可以将学位论文的全 部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描 等复制手段保存、汇编学位论文。 (保密的学位论文在解密后应遵守此规定)
III
目录
目
录
第一章 引言 .................................................................................................................1 1.1 研究背景和意义 .......................................................................................................1 1.2 国内外研究动态 .......................................................................................................2 1.3 本课题要达到的目标 ...............................................................................................3 1.4 本文的结构 ...............................................................................................................4 第二章 Buck 变换器的系统原理 ...............................................................................5 2.1 Buck 变换器的工作原理 .........................................................................................5 2.2 PWM 和 PFM 调制模式 ..........................................................................................8 2.2.1 PWM 调制模式 .................................................................................................8 2.2.2 PFM 调制模式 ...................................................................................................8 2.3 电压和电流控制模式 ..............................................................................................9 2.3.1 电压控制模式 ....................................................................................................9 2.3.2 电流控制模式 .................................................................................................10 2.4 环路的频率补偿原理 ............................................................................................. 11 2.5 Buck 变换器设计中的一些重要考虑因素 ...........................................................12 第三章 芯片的整体框架设计 ...................................................................................14 3.1 芯片的系统架构 .....................................................................................................14 3.2 芯片的外围电路设计 .............................................................................................16 3.2.1 输出电感 ..........................................................................................................16 3.2.2 输出电容 ..........................................................................................................17 3.2.3 输入电容 ..........................................................................................................17 3.2.4 自举电容 ..........................................................................................................17 3.2.5 其它元件 ..........................................................................................................18
学位授予单位和日期 答辩委员会主席 评阅人
电子科技大学
2010 年 注 1 注明《国际十进分类法 UDC》的类号
月
日
独 创 性 声 明
本人声明所呈交的学位论文是本人在导师指导下进行的研究工作 及取得的研究成果。据我所知,除了文中特别加以标注和致谢的地方 外,论文中不包含其他人已经发表或撰写过的研究成果,也不包含为 获得电子科技大学或其它教育机构的学位或证书而使用过的材料。与 我一同工作的同志对本研究所做的任何贡献均已在论文中作了明确的 说明并表示谢意。
分类号
密级
UDC
学
位
论
文
基于片内 PID 补偿器的高压大功率 Buck 变换器设计
(题名和副题名)
路 烜
(作者姓名) 指导教师姓名
张
波
教授 成都
电子科技大学
(职务、职称、学位、单位名称及地址) 申请学位级别 论文提交日期
硕士
专业名称
微电子学与固体电子学
2010-5-21
2010-4-29
论文答辩日期
II
ABSTRACT
hiccup-mode short-circuit protection circuit, smart overthermal circuit and on-chip PID compensator are completely analyzed and designed based on UMC 0.6-µm BCD process; At the same time, simulation software HISPICE is used to verify the function and performance demands of every sub-circuit above. Finally, main function and performance of the whole system is simulated and validated, and the simulation results meet original design objects well. Key words: high power, voltage mode, buck converter, on-chip PID compensation, frequency foldback, hiccup mode
关键词:大功率,电压模式,Buck 变换器,片内 PID 补偿,频率折返,打嗝模式
I
ABSTRACT
ABSTRACT
Step-down switching converter is extensively used in various electronic products instead of LDO due to its high efficiency. Recently, new technical requirements are present in the front of switching converter with rapid development of industrial and automotive power supplies, such as steady operation over wide input-voltage, load and temperature range, simpler design of peripheral circuits and smaller consumption of PCB area. A high voltage and high power voltage-mode Buck converter based on on-chip PID(Proportion Integration Differentiation)compensator is proposed in this thesis, which operates at 300KHz with supply voltage form 8 to 30V and maximum load current up to 5A. Ultimately, the efficiency is as high as up to 87%, the line regulation less than 0.02%/V, and the load regulation less than 0.01%/A. The on-chip PID compensator is implemented by active capacitor and inductor as well as miller capacitor, simplifying the design of peripheral circuits and minimizing PCB area of the whole system; The stability of feedback loop over wide input voltage range is guaranteed by gain compensation in the way of changing the location of low frequency pole in PID compensator; Soft-Start circuit is designed to suppress the inrush current and overshoot voltage during start-up; Besides, the chip can be effectively protected from being damaged under abnormal condition by various protection circuits such as frequency foldback oscillator, hiccup-mode short-circuit protection circuit and smart over-thermal protection circuit. In this thesis, basic operation principles of Buck converter is firstly analyzed, and the theory as well as merits and demerits of PWM/PFM modulation mode and voltage/current control mode are introduced; Secondly, frequency compensation theory of the feedback loop for voltage-mode Buck converter is analyzed, and some important considerations such as efficiency, safety and EMI are pointed out. Then system architecture is analyzed and given according to the requirements of performance demands, and sub-circuits in the charge of author including voltage reference, bias circuit, oscillator with the function of frequency foldback, soft-start circuit,