自动控制原理课程设计--火炮跟踪随动控制系统
舰载火箭炮伺服控制系统设计

舰载火箭炮伺服控制系统设计摘要:本文介绍一种舰载火箭炮伺服控制系统,基于PID控制算法,叠加前馈控制器输出提高控制系统的响应速度,根据fuzzy控制动态调整PID的比例、积分、微分参数保证控制系统的稳态精度,减小系统超调量,该控制系统具有稳定性高、响应速度快、精度高、安全性高等特点。
关键词:伺服控制;PID;fuzzy控制;前馈1.引言火箭炮是舰船武器系统的重要组成部分,火舰炮的控制精度和响应速度直接影响武器系统对目标的打击精度。
舰船武器系统主要包含火控、光瞄、火箭炮、时统等分系统,各分系统通过时统中断对时,火控台则控制各分系统协同工作,确保同一中断周期内的各分系统的数据时效性。
火控台接收光瞄设备提供的目标历史位置、弹道和海况信息解算出发射方位角、俯仰角等信息,火箭炮根据火控台提供的角度信息控制伺服调转。
1.火箭炮控制系统组成和工作原理火箭炮伺服系统分为主控模块、伺服驱动器、采样模块、安全监控模块、发射装置等,主控模块用于接收时统中断和火控台的角度指令,并控制伺服驱动器驱动发射装置调转至目标角度。
采样模块采集发射装置角度,将角度反馈给主控模块。
在调转过程中,安全监控模块实时监控发射装置状态信息,在装置过冲、过载等异常情况下,控制伺服驱动输出抱闸信号,急停发射装置。
火箭炮控制系统组成如图1所示。
图1火箭炮控制系统组成本文讨论的舰载火箭炮使用场景主要如下:1)接收火控台瞄准指令,火箭炮需要快速瞄准静态目标,等待火控台进一步指令;2)接收火控台预瞄准指令,火箭炮预调转至目标附近,根据火控台后续伺服调转指令,动态跟踪目标的运动。
根据以上使用场景,1.控制系统模型传统的PID算法难以同时满足控制系统的动态和稳态特性,为了同时保证火箭炮的响应速度和稳态精度,伺服系统控制模型采用基于PID的fuzzy+前馈控制。
PID控制用于保证火箭炮的稳态跟踪精度,模糊控制和前馈提高火箭炮的响应速度,控制模型结构图如图2所示。
多管火箭炮伺服随动系统设计及仿真

作者简介:周超(1986—),女,江苏镇江人,硕士研究生,研究方向为智能控制。
多管火箭炮伺服随动系统设计及仿真周超,张龙(南京理工大学机械工程学院,江苏南京210094)摘要:以某多管火箭炮伺服随动系统为背景,建立了系统的数学模型。
为满足系统高速高精度的位置控制,设计了复合模糊PID 控制器。
仿真结果表明该方法可以有效地提高火箭炮的自适应能力和鲁棒性,保证了目标跟踪精度。
关键词:多管火箭炮;模糊PID ;仿真中图分类号:TH12;TP391.9文献标志码:A文章编号:1671-5276(2012)03-0091-02Design and Simulation of Servo System for Multiple Rocket LaunchersZHOU Chao ,ZHANG Long(School of Mechanical Engineering ,Nanjing University of Science and Technology ,Nanjing 210094,China )Abstract :This paper takes the servo sysytem fo multi-barrel rocket launchers as the background and builds its mathematical model.To meet the high-speed and high-precision position control of this system ,it also designs the composite fuzzy PID controller.The simulation results show that the method is used to effectively improve the rocket ’s adaptive ability and robustness and ensure the ac-curacy of target tracking.Key words :multiple rocket launchers ;fuzzy PID ;simulation0引言火箭炮通常为多管联装,是炮兵的主要火力压制武器之一,具有结构简单、火力猛、射速高、反应快和突袭性好的特点,多用于对地面目标实施射击。
《自动控制原理》课程设计位置随动系统的超前校正
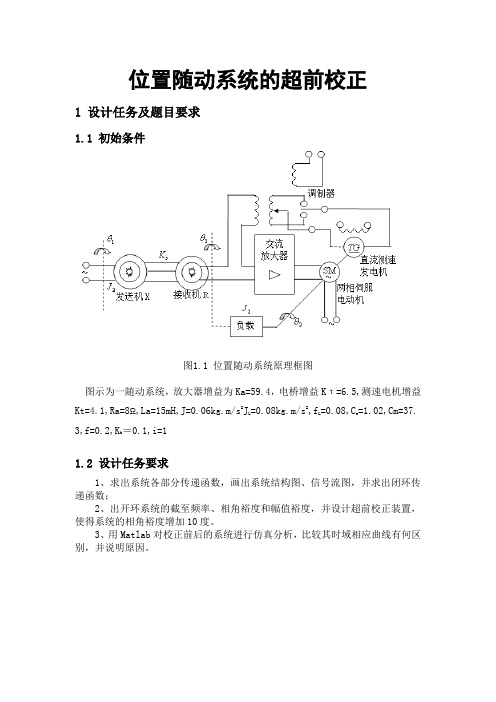
位置随动系统的超前校正1 设计任务及题目要求1.1 初始条件图1.1 位置随动系统原理框图图示为一随动系统,放大器增益为Ka=59.4,电桥增益Kτ=6.5,测速电机增益Kt=4.1,Ra=8Ω,La=15mH,J=0.06kg.m/s2JL =0.08kg.m/s2,fL=0.08,Ce=1.02,Cm=37.3,f=0.2,Kb=0.1,i=11.2 设计任务要求1、求出系统各部分传递函数,画出系统结构图、信号流图,并求出闭环传递函数;2、出开环系统的截至频率、相角裕度和幅值裕度,并设计超前校正装置,使得系统的相角裕度增加10度。
3、用Matlab对校正前后的系统进行仿真分析,比较其时域相应曲线有何区别,并说明原因。
2 位置随动系统原理2.1 位置随动系统工作原理工作原理:该系统为一自整角机位置随动系统,用一对自整角机作为位置检测元件,并形成比较电路。
发送自整角机的转自与给定轴相连;接收自整角机的转子与负载轴(从动轴)相连。
TX 与TR 组成角差测量线路。
若发送自整角机的转子离开平衡位置转过一个角度1θ,则在接收自整角机转子的单相绕组上将感应出一个偏差电压e u ,它是一个振幅为em u 、频率与发送自整角机激励频率相同的交流调制电压,即sin e em u u t ω=⋅在一定范围内,em u 正比于12θθ-,即12[]em e u k θθ=-,所以可得12[]sin e e u k t θθω=-这就是随动系统中接收自整角机所产生的偏差电压的表达式,它是一个振幅随偏差(12θθ-)的改变而变化的交流电压。
因此,e u 经过交流放大器放大,放大后的交流信号作用在两相伺服电动机两端。
电动机带动负载和接收自整角机的转子旋转,实现12θθ=,以达到跟随的目的。
为了使电动机转速恒定、平稳,引入了测速负反馈。
系统的被控对象是负载轴,被控量是负载轴转角2θ,电动机施执行机构,功率放大器起信号放大作用,调制器负责将交流电调制为直流电供给直流测速发电机工作电压,测速发电机是检测反馈元件。
自动控制原理课程设计-火炮跟踪随动控制系统
课程设计名称:自动控制原理课程设计题目:火炮跟踪随动控制系统课程设计任务书一、设计题目:车载武器随动系统设计二、设计任务:设计一个随动系统,使其发射端口在要求的精度和时间范围内跟踪目标.三、设计计划:1.查阅相关资料2.确定设计方案3.进行设计并定稿四、设计要求:要求设计的随动系统在跟踪过程有足够的稳定性与快速性课程设计成绩评定表摘要随动控制系统又名伺服控制系统。
其参考输入是变化规律未知的任意时间函数。
随动控制系统的任务是使被控量按同样规律变化并与输入信号的误差保持在规定范围内。
这种系统在军事上应用最为普遍.如导弹发射架控制系统,雷达天线控制系统等。
其特点是输入为未知。
本文对一个随动系统进行研究,在准确把握研究的方向基础上,始终以系统的高运行性能为目标,在控制系统的稳定性,快速性,准确性这三者之间的固有矛盾中寻找最佳的平衡点。
通过建立模型,元件确定,参数分析,串联校正四大模块,整合自动控制理论的各个知识点,包含了经典控制理论的大部分内容,知识点相互穿插,紧密联系,并有机结合成一篇完整的论文。
目录一系统设计的步骤――――――――――――――――――――――――― 1 1.1 设计方案―――――――――――――――――――――――――――11.1.1 控制系统的基本组成――――――――――――――――――――11.1.2 系统的构造――――――――――――――――――――――――11.2 系统的方框图及开环传函――――――――――――――――――――52.1系统方框图――――――――――――――――――――――――――52.2系统开环传函―――――――――――――――――――――――――6 1.3 火炮系统的工作过程――――――――――――――――――――――6 1.4 性能指标的确定――――――――――――――――――――――――6 二控制系统方案和主要元部件的选择―――――――――――――――――7 2.1 系统方案―――――――――――――――――――――――――――7 2.2 元部件选择――――――――――――――――――――――――――7 三开环增益和静态误差计算―――――――――――――――――――――83.1 系统无测速反馈――――――――――――――――――――――――8 3.2 系统加入测速反馈―――――――――――――――――――――――83.2.1劳斯判据分析――――――――――――――――――――――――93.2.1 根轨迹分析――――――――――――――――――――――――93.2.3频域分析―――――――――――――――――――――――――10 3.3 静态误差的计算――――――――――――――――――――――――11 四动态分析和校正装置的设计――――――――――――――――――――13 五结论――――――――――――――――――――――――――――――15 六设计体会――――――――――――――――――――――――――――16 七参考文献――――――――――――――――――――――――――――17一系统设计的步骤1.1设计方案1.1.1 控制系统的基本组成:(1)控制任务:控制火炮跟踪目标,确定目标位置,适时开炮击中目标。
自动控制原理课程设计
前言一般来说,随动控制系统要求有好的跟随性能。
位置随动系统是非常典型的随动系统,是个位置闭环反馈系统,系统中具有位置给定,位置检测和位置反馈环节,这种系统的各种参数都是连续变化的模拟量,其位置检测可用电位器、自整角机、旋转变压器、感应同步器等。
位置随动系统中的给只给定量是经常变动的,是一个随机量,并要求输出量准确跟随给定量的变化,输出响应具有快速性、灵活性和准确性。
为了保证系统的稳定性,并具有良好的动态性能,必须设有校正装置,如在正向通道中设置串联校正装并联校正装置等,为了提高位置随动系统的控制精度,还需要增加系统的开环放大倍数或在系统中增加积分环节等。
坦克火控系统等控制系统归根结底主要是依赖于位置随动系统的控制问题,其根本任务就是以足够的控制精度通过执行机构实现被控目标即输出位置对给定量即输入位置的及时和准确的跟踪。
1.控制系统的设计步骤根据综述所述,坦克火炮控制系统可抽象为位置随动系统,主要解决位置跟随的控制问题,其根本任务就是通过执行机构实现被控量即输出位置对给定量即输入位置的及时和准确的跟踪,并要求具有足够的控制精度。
根据设计任务的要求,本设计采用双闭环系统,实现输出信号对输入信号的跟踪和复现。
初步设计的环节如下角差检测装置可以选择电位器组成的检测器,或者自整角机检测装置。
有两个运算放大器环节:第一个运放为角差检测装置,它可以选择可以选择电位器组成的检测器,或者自整角机检测装置。
第二个运算放大器:给定电压与反馈电压在此合成,产生偏差电压,将经过该运算放大器放大。
功率放大器:给定电压与反馈电压在此合成,产生偏差电压,经过放大器放大。
执行部件:系统中执行元件可选用电枢控制直流伺服电动机和两相伺服电动机,电枢控制的直流伺服电动机在控制系统中广泛用作执行机构,能够实现对被控对象的机械运动的快速控制。
减速器:减速器对随动系统的工作有重大影响,减速器速比的选择和分配将影响到系统的惯性矩,并影响到快速性。
自动控制原理课程设计位置随动系统

,从而拖动负载运动。
~5~
重庆邮电大学自动化学院自动控制原理课程设计
直流电动机:微分方程式为 :
Tm
d M dt
m K mua K c M c
式中 Tm , K m , K c 及 M c 是考虑减速器和负载后,折算到电动机轴上的等效值。
测速发电机
是用于测量角速度并且将角速度转换成电压量的装置, 本设计中是永磁式直流测速 发电机。测速发电机的转子与带测量的轴相连接,在点电枢两端输出与转子角速度成正 比的直流电压,即 U T KT , 式中 K T 是测速发电机的比例系数。是测速发电机的输 出斜率,表示单位角速度的输出电压。
重庆邮电大学自动化学院自动控制原理课程设计
目录
一、设计题目 ....................................................................................................................... 2 1.1 设计目的 ............................................................................................................ 2 1.2 设计内容与任务 ............................................................................................... 2 二、报告正文 ....................................................................................................................... 3 2.1 任务一的分析与求解 ........................................................................................ 4 2.1.1 系统原理图 ..................................................................................................... 4 2.1.2 系统工作原理 ................................................................................................. 4 2.1.3 系统结构框图 ................................................................................................. 4 2.1.4 系统各环节传递函数..................................................................................... 5 2.2 任务二的分析与求解 ........................................................................................ 7 2.2.1 时域分析 ......................................................................................................... 7 2.2.2 频域分析 ....................................................................................................... 10 2.3 任务三的分析及求解 ...................................................................................... 11 2.3.1 校正要求 ...................................................................................................... 11 2.3.2 校正系统的函数的求解 ............................................................................... 12 2.3.3 通过 Matlab 仿真得到校正后传递函数的频域曲线特性 ............................ 12 三、设计总结及体会 .......................................................................................................... 15 3.1 总结 ................................................................................................................ 15 3.2 体会 ................................................................................................................. 15 四、参考文献: ................................................................................................................. 16 五、附录 ............................................................................................................................. 17 MATLAB 仿真函数 ............................................................................................... 17
自动控制原理教案
表示。
2.积分环节()ss G 1=微分环节()()()221lg 2011lg 20T T L ωωω+-=+=()⎪⎩⎪⎨⎧〉〉--=-〈〈=+-=T T T T 1,lg 20lg 20lg 201,001lg 202ωωωω通过以上例子,可总结出开环传递函数的对数相频率特性曲线有以下特点:(1) 开环对数频率特性在低频段的形状,只与系统的开环增益 K 和积分环节的个数有关,即曲线起始段的斜率由积分环节的个数决定,即()dec dB N /20-⨯。
0型系统,()ωL 曲线起始段是高度为k lg 20的一条水平线;(2) 在交接频率处曲线的斜率变化应视典型环节而定,如遇到 惯性环节,斜率要减少20dec dB /;遇到二阶振荡环节,斜率要减少40dec dB /;遇到一阶微分环节,斜率要增加20dec dB /。
(3)绘制对数相频特性曲线()ωφ时,起始段的渐进性方向趋势为⎪⎭⎫ ⎝⎛-⨯2πN ,高频段的渐进性方向趋势为()⎪⎭⎫⎝⎛-⨯-2πm n ;然后再求出交接频率处的准确值,用光滑的曲线连接即得该系统的对数相频特性渐进曲线。
小结:1. 开环传递函数的对数频率特性曲线的绘制方法作业:(2) 幅值稳定裕度令幅相曲线穿越—180°相位线所对应的频率为g ω,这个频率称为相角穿越频率,此频率所对应的幅值为()g A ω。
幅值稳定裕度的定义:相角穿越频率时的幅频特性的倒数称为幅值稳定裕度,简称幅值裕度,即()g g A k ω1=对于最小相位系统,1>gk 表示闭环系统稳定,而且g k 愈大,系统愈稳定;若1<g k ,闭环系统不稳定。
(3)相位稳定裕度令幅相曲线穿越0dB 线所对应的频率为c ω,这个频率称为幅值穿越频率,此频率所对应的相位为()c ωϕ。
相位稳定裕度的定义:幅值穿越频率c ω的相频特性与-180°之差称为相位稳定裕度,简称相位裕度,即()c ωϕγ+︒=180如果闭环系统稳定,则相位裕量0>γ,并且γ愈大,闭环系统愈稳定;反之,当0<γ,闭环系统不稳定。
《自动控制原理》教学大纲
自动控制原理》教学大纲一、课程的性质、地位与任务本课程是电力系统自动化技术专业的基础课程。
通过本课程的学习,使学生掌握自动控制的基础理论,并具有对简单连续系统进行定性分析、定量估算和初步设计的能力,学生将掌握自动控制系统分析与设计等方面的基本方法,如控制系统的时域分析法、根轨迹分析法、频域分析法、状态空间分析法、采样控制系统的分析等基本方本课程系统地阐述了自动控制科学和技术领域的基本概念和基本规律,介绍了自动控制技术从建模分析到应用设计的各种思想和方法,内容十分丰富。
通过自动控制理论的教学,应使学生全面系统地掌握自动控制技术领域的基本概念、基本规律和基本分析与设计方法,以便将来胜任实际工作,具有从事相关工程和技术工作的基本素质,同时具有一定的分析和解决有关自动控制实际问题的能力。
二、教学基本要求了解自动控制的概念、基本控制方式及特点、对控制系统性能的基本要求。
理解典型环节的传递函数、结构图化简或梅森公式以及控制系统传递函数的建立和表示方法,初步掌握小偏差线性化方法和通过机理分析建立数学模型的方法,以串联校正为主的根轨迹综合法,掌握常用校正装置及其作用。
熟悉暂态性能指标、劳思判据、稳态误差、终值定理和稳定性的概念以及利用这些概念对二阶系统性能的分析,初步了解高阶系统分析方法、主导极点的概念,能利用根轨迹对系统性能进行分析,熟悉偶极子的概念以及添加零极点对系统性能的影响。
频率特性的概念、开环系统频率特性Nyquist图和Bode图的画法和奈氏判据,了解绝对稳定系统、条件稳定系统、最小相位系统、非最小相位系统、稳定裕量、频指标的概念,以及频率特性与系统性能的关系。
基本校正方式和反馈校正的作用,掌握复合校正的概念和以串联校正为主的频率响应综合法。
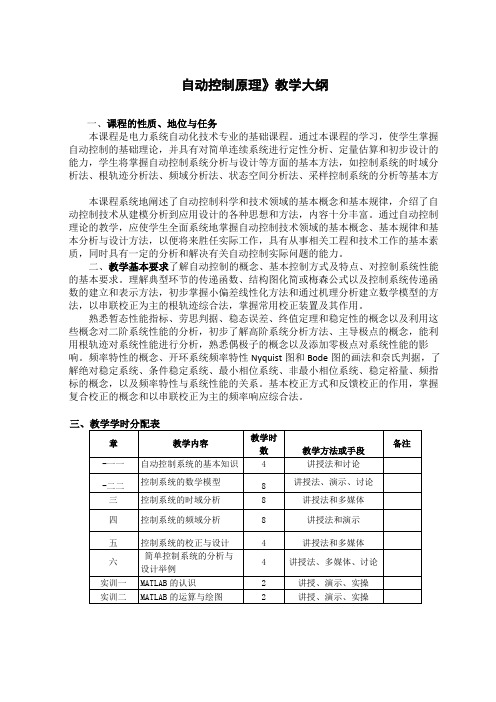
三、教学学时分配表四、教学内容与学时安排第一章自动控制系统的基本知识……4学时本章教学目的和要求:掌握自动控制系统组成结构和基本要素,理解自动控制的基本控制方式和对系统的性能要求,了解一些实际自动控制系统的控制原理。