10-5直接由平衡条件建立位移法基本方程
结构力学位移法表格

结构力学位移法表格篇一:结构力学位移法解析第十章位移法10-1 概述位移法——以结点位移(线位移,转角)为基本未知量的方法。
基本概念:以刚架为例(图10-1)基本思路:以角位移Z1为基本未知量平衡条件——结点1的力矩平衡位移法要点:一分一合①确定基本未知量(变形协调)基本体系-独立受力变形的杆件②将结构拆成杆件-杆件分析(刚度方程-位移产生内力、荷载产生内力)③将结构杆件合成结构:整体分析——平衡条件——建立方程10-2 等截面直杆的转角位移方程单跨超静定梁——由杆端位移求杆端力——转角位移方程矩阵形式一、端(B端)有不同支座时的刚度方程(1)B端固定支座(2)B端饺支座(3)B端滑动支座二、由荷载求固端力(3*,4,11*,12,19,20)(1)两端固定(2)一端固定,一端简支(3)一端固定,一端滑动(可由两端固定导出)三、一般公式叠加原理杆端位移与荷载共同作用杆端弯矩:(10-1)位移法意义(对于静定、超静定解法相同)基本未知量-被动(由荷载等因素引起)→按主动计算——位移引起杆端力+荷载的固端力→结点满足平衡正负号规则——结点转角(杆端转角)弦转角——顺时针为正杆端弯矩位移法三要素:1.基本未知量-独立的结点位移2.基本体系-原结构附加约束,分隔成独立变力变形的杆件体系。
3.基本方程-基本体系在附加约束上的约束力(矩)与原结构一致(平衡条件)10-3基本未知量的确定角位移数=刚结点数(不计固定端)线位移数=独立的结点线位移观察几何构造分析方法——结点包括固定支座)变铰结点铰结体系的自由度数=线位移数――即使其成为几何不变所需添加的链杆数。
10-4典型方程及计算步骤典型方程(10-5、6)无侧移刚架的计算无侧移刚架-只有未知结点角位移的刚架(包括连续梁)(△=0)有侧移刚架计算有侧移刚架――除结点有位移外还有结点线位移求解步骤:(1)确定基本未知量:Zi (按正方向设基本未知量)——基本体系,(2)作荷载、Zi = 1 —— MP??i=0?、Mi??i?1?图(3)求结点约束力矩:荷载——自由项RIp,及ΔJ = 1 ——刚度系数 kIJ(4)建立基本方程:[kIJ]{ Zi } + { RIp } = {0} ——附加约束的平衡条件求解Zi (Δi)(5) 叠加法作M?MP??MiZi10-5 直接建立位移法方程求解步骤:(1)确定基本未知量:Zi (按正方向设基本未知量)——基本体系,(2)写杆端弯矩(转角位移方程)(3)建立位移法方程——附加约束的平衡,求解Zi(4) 叠加法作M?MP??MiZi10-6 对称性利用对称结构对称荷载作用——变形对称,内力对称(M、N图对称,Q图反对称——Q对称)反对称荷载作用——变形反对称,内力反对称(M、N图反对称,Q图对称——Q反对称)——取半跨对称结构上的任意荷载——对称荷载+反对称荷载10-7支座位移和温度改变时的计算一、支座位移的计算超静定结构:支座有已知位移——引起内力位移法计算:基本未知量、(基本体系)、基本方程及解题步骤与荷载作用时一样区别在于固端力——自由项:R1P——荷载引起R1C ——支座位移引起二、温度改变时的计算与支座位移相同,超静定结构:温度改变——内力固端力(相当荷(来自: 小龙文档网:结构力学位移法表格)载作用)(表11—1,5、11、15)Δt = t1 — t2 ——M图,受拉面在温度铰低一侧。
结构力学-直接由平衡条件建立位移法基本方程
Z2
P/2
用位移法分析上图时,将遇到一端固定另一端滑动的梁的内力如何确定的问题。
显然这不难用力法求解;也可以将原两端固定的梁在正对称的情况下的内力图
作出,然后截取一半即可。但此时需注意,此梁由于比原来两端固定梁短了
一半,故其相应的线刚度大了倍。此外,在正对称的荷载时用位移法求解只有
一个基本未知量,但在反对称的荷截时若用位移法求解将有两个基本未知量,
§10-6 对称性的利用
前面已经讨论过对称性的利用,并且得到一个重要的结论:对称结构在正对 称的荷截作用下,其内力和位移都是正对称的;在反对称的荷截作用下,其 内力和位移都是反对称的。在这里结论同样适用,并且同样可以分解来简化 计算。如下图所示:
Z1
Z1
Z2
Z2
P
P/2
P/2
P/2
P/2
=
+
Z1
P/2
而用力法求解则只有一个基本未知量。因此,可以两种方法结合使用,在正对
称时用位移法,在反对称时用力法,比较简便。
例:
A A
a=1 a=1
未知数个数;正位3,力法6:反位6,力法3。
Z1
B I1=EI/l2
P
P/2
P/2
l1
I=EI/l
a’ A’
Z2
P/2
= +
x1 P/2 x2
L=2l1
将以上各系数代入典型方程:
6EIZ1/10 -6EIZ2/100-100=0 -6EIZ1/100+112EIZ2/1000-60=0
可解得
Z1=232。7/EI Z2=660。4/EI
由叠加法 M=M1‘Z1+M2’Z2+Mp可绘出最后的弯矩图如(h)所示。然后不
结构力学第8章位移法

结构力学第8章位移法位移法是结构力学中一种常用的分析方法。
它基于结构物由刚性构件组成的假设,通过计算结构在外力作用下产生的位移和变形,进而推导出结构的反力和应力分布。
位移法的基本思想是将结构的局部位移组合成整体位移,通过建立位移和反力之间的关系,解决结构的力学问题。
位移法的分析步骤通常包括以下几个方面:1.建立结构的整体位移函数。
位移函数是位移法分析的基础,通过解结构的运动方程建立结构的位移与自由度之间的关系。
2.应用边界条件。
根据边界条件,确定结构的支座的位移和转角值。
支座的位移和转角值可以由结构的约束条件和外力产生的位移计算得出。
3.构建位移方程组。
将结构的整体位移函数带入到结构的平衡方程中,得到位移方程组。
位移方程组是未知反力系数的线性方程组。
4.解位移方程组。
通过解位移方程组,求解未知反力系数。
可以使用高斯消元法、克拉默法则或矩阵方法等解方程的方法求解。
5.求解反力和应力分布。
通过已知的位移和未知的反力系数,可以计算出结构的反力和应力分布。
这些反力和应力分布可以进一步用于结构的设计和评估。
位移法的优点是适用范围广泛,适合复杂结构的分析。
它可以处理线性和非线性的结构,包括静力学和动力学的分析。
同时,位移法具有较高的精度和准确度,在结构的分析和设计中得到广泛应用。
然而,位移法也存在一些限制。
首先,位移法假设结构是刚性的,忽略了结构的变形和位移过程中的非线性效应。
其次,位移法需要建立适当的位移函数,对于复杂结构来说,这是一个复杂和困难的任务。
此外,位移法在处理大变形和非线性结构时可能会遭遇困难。
综上所述,位移法是结构力学中一种重要的分析方法。
它通过计算结构的位移和变形,推导出结构的反力和应力分布,为结构的设计和评估提供基础。
然而,位移法也存在一些限制,需要在具体的分析问题中谨慎应用。
01-结构力学 位移法知识点小结
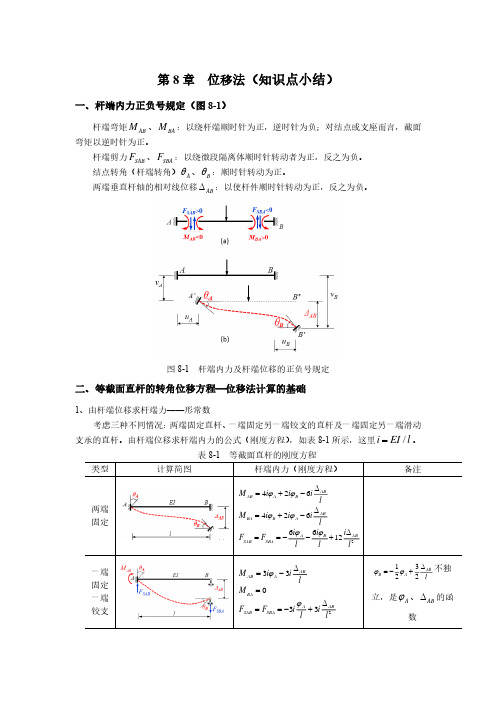
第8章 位移法(知识点小结)一、杆端内力正负号规定(图8-1)杆端弯矩AB M 、BA M :以绕杆端顺时针为正,逆时针为负;对结点或支座而言,截面弯矩以逆时针为正。
杆端剪力SAB F 、SBA F :以绕微段隔离体顺时针转动者为正,反之为负。
结点转角(杆端转角)A θ、B θ:顺时针转动为正。
两端垂直杆轴的相对线位移AB ∆:以使杆件顺时针转动为正,反之为负。
图8-1 杆端内力及杆端位移的正负号规定二、等截面直杆的转角位移方程—位移法计算的基础1、由杆端位移求杆端力——形常数考虑三种不同情况:两端固定直杆、一端固定另一端铰支的直杆及一端固定另一端滑动支承的直杆。
由杆端位移求杆端内力的公式(刚度方程),如表8-1所示,这里/i EI l =。
由杆端位移求出杆端弯矩后,杆端剪力可由平衡条件求出。
表8-1中,杆端内力是根据图示方向的位移方向求得的,当计算某一结构时,应根据其杆件所受的实际位移方向,判断其杆端内力的正负号及受拉侧。
2、由荷载求固定内力——载常数对三种等截面直杆,在荷载作用、温度改变作用下的杆端弯矩和剪力,称为固端弯矩和固端剪力(载常数)。
常见荷载作用下的载常数可查表所得。
3、等截面直杆的转角位移方程对等截面直杆,既有已知荷载作用,又有已知的杆端位移,可根据叠加原理,写出其杆端力的一般表达式,这即为等截面直杆的转角位移方程。
三、位移法的基本未知量包括独立的结点角位移和独立的结点线位移。
独立的结点角位移数目等于刚结点(包括组合结点、弹性抗转弹簧)的数目。
结点线位移的数目可通过增设支杆法(或铰化体系法)来确定。
铰化体系法就是将原结构中所有刚结点和固定支座均改为铰结点形成铰接体系,此铰接体系的自由度数就是原结构的独立结点线位移数。
然后分析该铰接体系的几何组成:如果它是几何不变的,说明结构无结点线位移;相反,如果铰接体系是几何可变的,再看最少需要增设几根附加支杆才能确保体系成为几何不变,或者说使此铰接体系成为几何不变而需添加的最少支杆数就等于原结构的独立结点线位移数目。
位移法的基本结构及位移法方程

位移法方程
20kN/m
C
D
Z1
F1=0
k11 Z 1 F1P 0
A B
All Rights Reserved
重庆大学土木工程学院®
a)
MP图(kN· m)
C D F1P C
b)M1图 (1/m)
D Z 1=1 k 11 C
c)
M图(kN· m)
D
(90) A -90 B C
F FQ CA = 45
1 F1P FP l 8
All Rights Reserved
重庆大学土木工程学院®
k11 Z 1 F1P 0
将k11和F1P的值代入上式,解得
Z1 F1P FP l k11 64i
结果为正,表示Z1的方向与所设相同。结构的最后弯矩 可由叠加公式计算,即
M M 1 Z1 M P
8.4
位移法的基本结构及位移法方程
一、位移法的基本结构 位移法的基本结构就是通过增加附加约束(包括附加刚 臂和附加支座链杆)后,得到的三种基本超静定杆的综 合体。 所谓附加刚臂,就是在每个可能发生独立角位移的刚结 点和组合结点上,人为地加上的一个能阻止其角位移 (但并不阻止其线位移)的附加约束,用黑三角符号“ ” 表示。 所谓附加支座链杆,就是在每个可能发生独立线位移 的结点上沿线位移的方向,人为地加上的一个能阻止 其线位移的附加约束。
c) 基本体系 C
A Z1
重庆大学土木工程学院®
三、位移法方程
P l/2 l/2 l/2 FP lF /2
A A Z 1Z
1
C C Z1 Z
1
F1=0F1=0 FP Z1 Z1 A A Z1 Z Z1 Z1 1
直接利用平衡条件建立位移法方程
=12Z1+30
MBC=2iBC(2Z1+Z2)+0=2×4(2Z1+Z2)=16Z1+8Z2
MCB=2iCB(2Z2+Z1)+0=2×4(2Z2+Z1)=16Z2+8Z1
MBE=2iBE×2Z1+0=2×3×2Z1=12Z1
MEB=2iBEZ1+0=2×3Z1=6Z1
MCD=3iCDZ2+0=3×4Z2=12Z2
M A1 27.79 kN m
M1A 8.82 kN m
M12 8.82 kN m
M 21 0 M2B 0
MB2 11.37 kN m
与例15.3的计算结果相同。
目录
位移法\直接利用平衡条件建立位移法方程 【例15.6】 试直接利用平衡条件建立图a所示刚架的位移法方
程,计算各杆端弯矩,并绘制弯矩图。 【解】 1)确定基本未知量。图a所示刚架为无侧移刚架,有
直接利用平衡条件建立位移法典型方程时,需要对每个杆 件进行受力、变形分析,找出杆端内力与杆端位移及荷载之 间的关系表达式。此关系式称为转角位移方程。
目录
位移法\直接利用平衡条件建立位移法方程
图a所示两端固定梁, 受荷载作用,并在A端产
生了一转角 A ,B端产 生了一转角 B ,同时A、
B两端还产生一相对线位 移ΔAB ,变形如虚线所示。 由叠加原理,该梁的受 力、变形情况可看成由 图b、c、d、e各因素单 独作用叠加而成。
M 21 0
M2B 0
M B2
3iB2 3)建立位移法方程并求解。由以
上关系式可见,只要求出结点位移Z1 、 Z2 ,则可得出全部杆端弯矩。
目录
位移法\直接利用平衡条件建立位移法方程
17.位移法

φA MAB
P
q t1˚C βAB EI t2˚C B B' MBA l
A φA QAB
M AB M BA FQAB F QBA
f i A M AB f i A M BA F FQAB
0
位移法的思路
将结构的结点角位移和结点线位移作为基本未知量,固端弯矩、 ø B A C ø B B (al l 固端弯矩、固端剪力,从而将超静定结构转化为静定结构。 Z1= ø B
B 1.15
(4)计算杆端弯矩
A
40
B
62.5
D
C
9.8
M BA 43.5kN .m; M BC 46.9kN .m; M CB 24.5kN .m; M CD 14.7kN
E
3.4
9kN.m; M CB 24.5kN.m; M CD 14.7kN.m;
M BE 3.4kN .m; M EB 1.7kN .m;
φA P q MAB A φA βAB QAB t1˚C βAB EI t2˚C φB B' MBA QBA l B ΔAB
EI EI EI f M 4 2 6 Δ M AB A B AB l l l2 M 2 EI 4 EI 6 EI Δ M f A b BA BA l l l2 Q 6EI 6EI 12EI Δ Q f a b AB AB l2 l2 l3 6EI 6EI 12EI f Q AB 2 a 2 b 3 Δ QBA l l l
B
B C B
C
C
A
D
二、基本假设
1、小变形假设。 2、不考虑轴力和弯曲内力、弯曲变形之间相互影响。 (采用上述假设后,图示刚架有3个基本未知量。)
位移法的基本体系.
柱
3 M 4 B 3 B 3 1.15 3.45kN m BE 4 M 4 1 2 2 (4.89) 9.8kN m CF C C 2
43.5 46.9 24.5 14.7
A
3.45
B
1.7
C 9.8
D
M图 (kN m)
k11 1=1 1 k21 2
k11×0+k21 ×1 = k12 ×1+k22 ×0
2=1
k12
2019/2/28
k21=k12
7
k22
例1、试用位移法分析图示刚架。
q=20kN/m A 4I0 B 3I0 E F 5I0 C 4I0
(1)基本未知量
D Δ 1、 Δ 2、Δ3 4m (2)基本体系 计算杆件线性刚度i, 设EI0=1,则
E 3.6
3.97
F
11
§6-4
无侧移刚架的计算
如果除支座以外,刚架的各结点只有角位移而没有线位移,这种刚架称 为无侧移刚架。 1、基本未知量B P=20kN q=2kN/m 2、固端弯矩
A
EI
3m 3m
B
B EI
6m
C
MAB
EI
P
B
MBC B
q
EI
Pl 20 6 mBA 15kN m 8 8 mAB 15kN m ql2 mBC 9kN m 8
M BC 4 B 2 C 41.7
2019/2/28
M CD 3 C
14
M BA 3iAB B mBA 3 B 40
M CD 3 C
梁
M BC 4 B 2 C 41.7
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
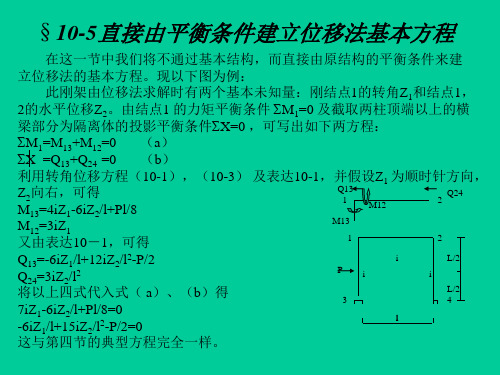
在这一节中我们将不通过基本结构,而直接由原结构的平衡条件来建 立位移法的基本方程。现以下图为例: 此刚架由位移法求解时有两个基本未知量:刚结点1的转角Z1和结点1, 2的水平位移Z2。由结点1 的力矩平衡条件 ΣM1=0 及截取两柱顶端以上的横 梁部分为隔离体的投影平衡条件ΣX=0 ,可写出如下两方程: ΣM1=M13+M12=0 (a) ΣX =Q13+Q24 =0 (b) 利用转角位移方程(10-1),(10-3) 及表达10-1,并假设Z1 为顺时针方向, Q13 Q24 Z2向右,可得 1 2 M12 M13=4iZ1-6iZ2/l+Pl/8 M13 M12=3iZ1 1 2 又由表达10-1,可得 i L/2 Q13=-6iZ1/l+12iZ2/l2-P/2 P i i Q24=3iZ2/l2 L/2 将以上四式代入式( a)、(b)得 3 4 7iZ1-6iZ2/l+Pl/8=0 l -6iZ1/l+15iZ2/l2-P/2=0 这与第四节的典型方程完全一样。
4EI/10 (d) k 2EI/10
O Z1’=1 O 2EI/10 M1-图
(g)
100 O 50 O k
O O 50
O O
Mp图
53.5 (h) 6.9 O
53.5 M图(KN.m) O 6.9 96.5
绘出基本结构的有关M图,可求得 r11= 6EI/10 r12= r21=-6EI/100 r22=12EI/1000+k=12EI/1000+EI/10=112EI/1000 R1p= -100 R2p= -60 将以上各系数代入典型方程: 6EIZ1/10 -6EIZ2/100-100=0 -6EIZ1/100+112EIZ2/1000-60=0 可解得 Z1=232。7/EI Z2=660。4/EI 由叠加法 M=M1‘Z1+M2’Z2+Mp可绘出最后的弯矩图如(h)所示。然后不 难 转到下一节 求出剪力图及求出支座反力。
ϕa=1 A ϕa=1 A L=2l1 2i = 4i 4i 2i=i1 2i + B I1=EI/l2 Ο Ο ΟΟ l1 I=EI/l ϕa’ A’ Z3 Z1 P P/2 Z2 = P/2 P/2 + x3 x1 P/2 x2
例10-2 试计算下图所示弹性支承连续梁,梁的EI=常数,弹性支座刚度K=EI/10 解: 这是一个对称结构,承正对称荷载,取一半结构如图所示,C处为动支座。 用位移法求解时,基本未知量为结点B的转角Z1和竖向位移Z2,基本体系如图 所示,典型方程为: r11Z1+r12Z2+R1p=0 r21Z1+r22Z2+R2p=0 12kN/m EI EI (a) O O A B k EI k (b) (c) A 6EI/10 (e) O 6EI/10 M2图 Z1 O B O O O O Z2’=1 取一半体系 r22 12EI/103 (f) B k 0
P/2 P/2
P/2
Z2
用位移法分析上图时,将遇到一端固定另一端滑动的梁的内力如何确定的问题。 显然这不难用力法求解;也可以将原两端固定的梁在正对称的情况下的内力图 作出,然后截取一半即可。但此时需注意,此梁由于比原来两端固定梁短了 但此时需注意,
一半,故其相应的线刚度大了倍。此外,在正对称的荷载时用位移法求解只有 一半,故其相应的线刚度大了倍。此外, 一个基本未知量,但在反对称的荷截时若用位移法求解将有两个基本未知量, 一个基本未知量,但在反对称的荷截时若用位移法求解将有两个基本未知量, 而用力法求解则只有一个基本未知量。因此,可以两种方法结合使用,在正对 而用力法求解则只有一个基本未知量。因此,可以两种方法结合使用, 称时用位移法,在反对称时用力法,比较简便。 称时用位移法,在反对称时用力法,比较简便。 例: 未知数个数;正位3,力法6:反位6,力法3。
§10-6 对称性的利用 10-
前面已经讨论过对称性的利用,并且得到一个重要的结论:对称结构在正对 称的荷截作用下,其内力和位移都是正对称的;在反对称的荷截作用下,其 内力和位移都是反对称的。在这里结论同样适用,并且同样可以分解来简化 计算。如下图所示:
Z1
Z1
P/2
Z2 P/2
Z2
P
P/2பைடு நூலகம்
=
Z1
+
可见,两种方法本质相同,只是在处理方法上稍有立差别。一般情况下,当 结构有n个基本未知量时,对应于每一个结点都有一个结点转角都有一个相 应的刚结点力矩平衡方程,对应于每一个独立的结点线位移都有一个相应的 截面平衡方程。因此,可建立n个方程,求解出n个结点位移。然后各杆端 的最后弯矩即可由转角位移方程算得。