理论力学第3章力系的平衡条件与平衡方程
合集下载
理论力学力系的平衡
A
FBC
30o
FAB
G
2. 再选取 点为研究对象,它的受力图如图所示。 再选取C点为研究对象 它的受力图如图所示。 点为研究对象, 这是一空间汇交力系,作直角坐标系 这是一空间汇交力系,作直角坐标系Axy,把力系中各力 , 投影到Axy平面和 轴上。 平面和Az轴上 投影到 平面和 轴上。 先列出对Az轴的投影方程 先列出对 轴的投影方程 ∑Fz = 0,
M2
z
M
M3
M1
45° ° 45° °
y
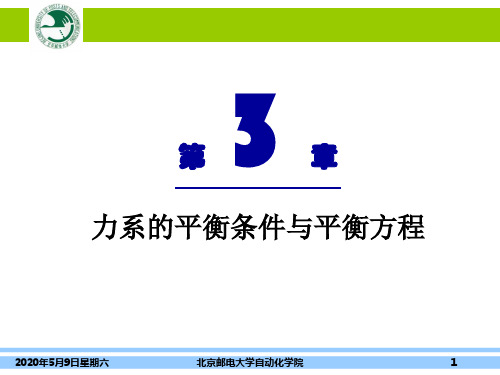
4. 为使这个刚体平衡,需加一力偶, 为使这个刚体平衡,需加一力偶, 其力偶矩矢为 M4= -M 。
建立如图坐标系Bxyz, 其中 轴平分 ∠ CBD。 由于 轴平分∠ 建立如图坐标系 , 其中y轴平分 。 由于ABCD是 是 解: 正棱锥,所以 与 的夹角为θ。 正棱锥,所以AB与y 轴 的夹角为 。
1.取球铰链 为研究对象 受力分析如图。 1.取球铰链A为研究对象,受力分析如图。 取球铰链 为研究对象, 为求各力在轴x,y上的投影,可先向坐标面Bxy上投影,然后 上的投影,可先向坐标面 上投影, 为求各力在轴 上的投影 上投影 再向轴上投影。 再向轴上投影。 各力在坐标面Bxy上投影 上投影 各力在坐标面
3.合力偶矩矢M 的大小和方向。 .合力偶矩矢 的大小和方向。
2 2 2 M = Mx + My + Mz = 42.7 N⋅ m
Mx ( cos( M, i) = = 0, ∠ M, i) = 90° M My ( cos( M, j) = = 0.262, ∠ M, j) = 74.8° M Mz ( cos( M, k) = = 0.965, ∠ M, k) =15.2° M
理论力学教程课件-力系的平衡

FBA
F 2 sin
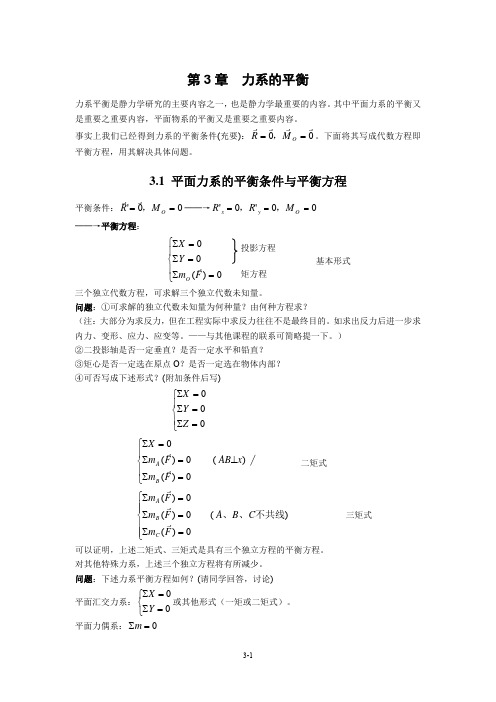
(2)取挡板C为研究对象
Y 0, FM FCB cos 0
解得
FM
FCB
cos
F 2
cot
B FBA
F B
FBC FBC
FCB
C
FNC FM
A
F
C M
FCB
§3.2 平面力偶系的平衡
若物体在平面力偶系作用下处于平衡, 则合力偶矩等于零
Mi 0
由合力之矩定理:
Ph
dP
x
l
0
q(
x)
x
dx
合力作用线位置:
l
q(x)xdx
h
0 l
0 q(x)dx
☆ 两个特例
(a) 均布荷载 P
q
h
x
l
l
P 0 q(x)dx ql
l
h
q( x) x dx
0 l
q( x)dx
l 2
0
(b) 三角形分布荷载 P q0
h
x
l
Y 0,
FAy FB 0 FAy P
PC
2a M D
解法2
a
FAy
FB
A
B
FAx
解法3
M A( F ) 0, M B( F ) 0, MC( F ) 0,
解上述方程,得
FB 2a M Pa 0 FAy 2a Pa M 0 FAxa FB 2a M 0
Mo=0
X 0
Y 0
理论力学第3章 力系的平衡条件与平衡方程
10
例题二的解答
解:选取研究对象:杆CE(带有销 钉D)以及滑轮、绳索、重物组成 的系统(小系统)受力分析如图, 列平衡方程:
M D (F ) 0 M C (F ) 0 M B (F ) 0
( F C cos ) CD F ( DE R ) PR 0 F Dx DC F ( CE R ) PR 0 F BD F ( DE R ) P ( DB R ) 0 Dy
2012年11月3日星期六
北京邮电大学自动化学院
29
滚动摩擦力偶的性质
滚动摩擦力偶M 具有如下性质(与滑动摩擦力性质类似): ◆ 其大小由平衡条件确定; ◆ 转向与滚动趋势相反; ◆ 当滚子处于将滚未滚的平衡临界状态时, M = M max =δFN
式中:δ —滚动摩擦系数,它的量纲为长度; FN —法向反力(一般由平衡条件确定)。
q (2a b) 2a
2
YA q (2a b)
16
2012年11月3日星期六
北京邮电大学自动化学院
课堂练习3
多跨静定梁由AB梁和BC梁用中间铰B连接而成,支撑和荷 载情况如图所示,已知P = 20kN,q=5kN⋅m,α = 45°。求 支座A、C的反力和中间铰B处的反力。
2012年11月3日星期六
x
xC
x
2012年11月3日星期六
北京邮电大学自动化学院
5
平行分布线载荷的简化
Q
q
1、均布荷载 Q=ql
l 2
l 2
Q
q
2、三角形荷载 Q=ql /2
2l 3
l 3
Q
3、梯形荷载 Q=(q1+q2)l /2 (自己求合力的位置)
理论力学-3-力系的平衡

z
F2
O
F1
F
z
0
M F 0 M F 0
x y
自然满足,且
M F 0
z
M F 0
O
平面力系平衡方程的一般形式
于是,平面力系平衡 方程的一般形式为: z O y
Fx 0 Fy 0 M F 0 o
其中矩心 O 为力系作用面 内的任意点。
静不定次数:静不定问题中,未知量的个数与独立的平 衡方程数目之差。
多余约束:与静不定次数对应的约束,对于结构保持静 定是多余的,因而称为多余约束。 关于静不定问题的基本解法将在材料力学中介绍。
P A m a B q
解:对象:梁 受力:如图 方程:
C
b
F F
0, FAx P cosq 0, FAx P cosq # FAy FB P sin q 0 1 y 0, M A F 0, m FBa Pa bsinq 0 2
B A
FR FR
x
A
B
FR
A、B 连线不垂直于x 轴
B A
FR
x
3.3 平面力系的平衡方程 “三矩式” M A = 0, MB = 0 , MC = 0。
C B A C B A
FR FR
满足第一式? 满足第二式? 满足第三式?
B A
FR
FR
A、B、C 三点不 在同一条直线上
C A
B
M (F ) 0 Fy 0
A
FQ (6 2) FP 2 FB 4 W (12 2) 0
FQ FA FP FB W 0
理论力学:第3 章 力系的平衡
第 3 章 力系的平衡
力系平衡是静力学研究的主要内容之一,也是静力学最重要的内容。其中平面力系的平衡又
是重要之重要内容,平面物系的平衡又是重要之重要内容。
事实上我们已经得到力系的平衡条件(充要):
R
0,M O
0 。下面将其写成代数方程即
平衡方程,用其解决具体问题。
3.1 平面力系的平衡条件与平衡方程
受力图如图(c),列解方程:
Y 0, P cos G sin 0
P
使 P 最小,则
G sin cos
G sin cos( )
cos( ) 1,
arctan 3
3652'
Pmin
G sin
20
3 5
12kN
4
另解:(几何法) 画自行封闭的力三角形,如图(d),则
Q
G(b
e) 50b a
Hale Waihona Puke 350.0kN∴ 使起重机正常工作的平衡重为:333.3kN≤Q≤350.0kN 注:也可按临界平衡状态考虑,求 Pmin 和 Pmax。 静力学的应用:
学习静力学有何用处?——上面几个例题有所反映。
例 1:碾子问题——满足工作条件的载荷设计。
例 2:梁平衡问题——结构静态设计(一类重要工程问题)。
分由由由图图图析(((:acb)))汽:::车受平面平行力mmm系EBB(((,FFF))易) 列解000,,,方程。下shl面只给出方程:
例 4 平行力系典型题目,稳定性问题且求范围。 行动式起重机的稳定性极其重要,要求具有很好的稳定裕度,满载时不向右翻倒,空载时不 向左翻倒。已知自重 G = 500kN,最大载荷 Pmax = 210kN,各种尺寸为:轨距 b = 3m,e = 1.5m, l = 10m,a = 6m,试设计平衡重 Q,使起重机能正常工作,且轨道反力不小于 50kN。
力系平衡是静力学研究的主要内容之一,也是静力学最重要的内容。其中平面力系的平衡又
是重要之重要内容,平面物系的平衡又是重要之重要内容。
事实上我们已经得到力系的平衡条件(充要):
R
0,M O
0 。下面将其写成代数方程即
平衡方程,用其解决具体问题。
3.1 平面力系的平衡条件与平衡方程
受力图如图(c),列解方程:
Y 0, P cos G sin 0
P
使 P 最小,则
G sin cos
G sin cos( )
cos( ) 1,
arctan 3
3652'
Pmin
G sin
20
3 5
12kN
4
另解:(几何法) 画自行封闭的力三角形,如图(d),则
Q
G(b
e) 50b a
Hale Waihona Puke 350.0kN∴ 使起重机正常工作的平衡重为:333.3kN≤Q≤350.0kN 注:也可按临界平衡状态考虑,求 Pmin 和 Pmax。 静力学的应用:
学习静力学有何用处?——上面几个例题有所反映。
例 1:碾子问题——满足工作条件的载荷设计。
例 2:梁平衡问题——结构静态设计(一类重要工程问题)。
分由由由图图图析(((:acb)))汽:::车受平面平行力mmm系EBB(((,FFF))易) 列解000,,,方程。下shl面只给出方程:
例 4 平行力系典型题目,稳定性问题且求范围。 行动式起重机的稳定性极其重要,要求具有很好的稳定裕度,满载时不向右翻倒,空载时不 向左翻倒。已知自重 G = 500kN,最大载荷 Pmax = 210kN,各种尺寸为:轨距 b = 3m,e = 1.5m, l = 10m,a = 6m,试设计平衡重 Q,使起重机能正常工作,且轨道反力不小于 50kN。
C·A上传 【理论力学】第三章 力系的平衡
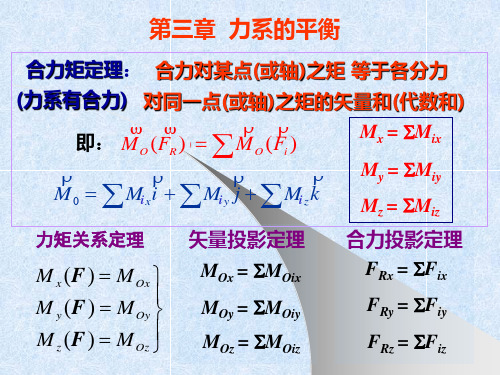
BE CE FDC =0 0; ∑ Fix =FDB DB DC
FDC FDB
P
BE = CE DB = DC 则:FDB = FDC
DO DO DO ∑ Fiy FDB = 0; FDC FDA =0 DB DC DA
cm DB = 20 3, , DA = 20 5;cm
FDA
EO AO 0; ∑ Fiz = FDB 2 FDA P=0 DB DA
汇交力系
√2 FA = FC = — F = FB 力多边形自行封闭
2
r F r F
C
B
r FB
例3-2:已知物体的重量为 .求:(a)平衡时铅垂力 , - :已知物体的重量为P )平衡时铅垂力F, (b)维持平衡时 的最小值及其相应方向.不计构件自重. )维持平衡时F 的最小值及其相应方向.不计构件自重. 讨论题
3 联立求解 FDA = P = 745N , 3 FDB = FDC = 289N
避免解联立方程 改变坐标方向
立柱AB与绳 与绳BC 例3-8:起重机起吊重量 =1kN.求:立柱 与绳 ,BD,BE - :起重机起吊重量P . x' 的受力. 的受力.
解: B点有四个未知力汇交, 点有四个未知力汇交, 点有四个未知力汇交
§3-1 汇交力系的平衡 -
汇交力系简化的结果
汇交力系平衡的充要条件: 汇交力系平衡的充要条件: 充要条件 力系的合力等于零
r FR = 0
各力全部 汇交力系平衡的几何条件 力多边形自行封闭 首尾相连 几何条件: 汇交力系平衡的几何条件: 仅适用于平 力多边形法则 解析条件: 汇交力系平衡的解析条件 平衡方程 汇交力系平衡的解析条件: 面汇交力系 几何法 空间汇交力系: 合力投影定理
FDC FDB
P
BE = CE DB = DC 则:FDB = FDC
DO DO DO ∑ Fiy FDB = 0; FDC FDA =0 DB DC DA
cm DB = 20 3, , DA = 20 5;cm
FDA
EO AO 0; ∑ Fiz = FDB 2 FDA P=0 DB DA
汇交力系
√2 FA = FC = — F = FB 力多边形自行封闭
2
r F r F
C
B
r FB
例3-2:已知物体的重量为 .求:(a)平衡时铅垂力 , - :已知物体的重量为P )平衡时铅垂力F, (b)维持平衡时 的最小值及其相应方向.不计构件自重. )维持平衡时F 的最小值及其相应方向.不计构件自重. 讨论题
3 联立求解 FDA = P = 745N , 3 FDB = FDC = 289N
避免解联立方程 改变坐标方向
立柱AB与绳 与绳BC 例3-8:起重机起吊重量 =1kN.求:立柱 与绳 ,BD,BE - :起重机起吊重量P . x' 的受力. 的受力.
解: B点有四个未知力汇交, 点有四个未知力汇交, 点有四个未知力汇交
§3-1 汇交力系的平衡 -
汇交力系简化的结果
汇交力系平衡的充要条件: 汇交力系平衡的充要条件: 充要条件 力系的合力等于零
r FR = 0
各力全部 汇交力系平衡的几何条件 力多边形自行封闭 首尾相连 几何条件: 汇交力系平衡的几何条件: 仅适用于平 力多边形法则 解析条件: 汇交力系平衡的解析条件 平衡方程 汇交力系平衡的解析条件: 面汇交力系 几何法 空间汇交力系: 合力投影定理
理论力学第3章
Pz Psin45 Pxy Pcos45 Px Pcos45sin60 Py Pcos45cos60
理论力学
中南大学土木建筑学院
7
mz (P )mz (P x )mz (P y )mz (P z )6Px (5Py )0 6Pcos45sin605Pcos45cos6038.2(Nm)
mx (P )mx (P x )mx (P y )mx (P z )006Pz 6Psin4584.8(Nm)
由 mA (Fi ) 0
P2a N B
3a0,
N B
2P 3
X 0
XA 0
Y 0
YB NB P0,
YA
P 3
理论力学
中南大学土木建筑学院
22
二、平面平行力系平衡方程 平面平行力系的平衡方程为:
Y 0
mO (Fi )0
一矩式
实质上是各力在x 轴上的投影恒 等于零,即 X 0 恒成立, 所以只有两个独立方程,只能 求解两个独立的未知数。
一、空间任意力系的平衡充要条件是:
R '0F 0 M O mO (Fi )0
又 R' (X )2 (Y )2 (Z )2
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0 Z 0,mz (F )0
再研究轮
mO (F )0
SAcosRM 0 X 0
X O SAsin 0
Y 0
S Acos YO 0
M PR XO P tg YO P
[负号表示力的方向与图中所设方向相反]
理论力学
中南大学土木建筑学院
理论力学
中南大学土木建筑学院
7
mz (P )mz (P x )mz (P y )mz (P z )6Px (5Py )0 6Pcos45sin605Pcos45cos6038.2(Nm)
mx (P )mx (P x )mx (P y )mx (P z )006Pz 6Psin4584.8(Nm)
由 mA (Fi ) 0
P2a N B
3a0,
N B
2P 3
X 0
XA 0
Y 0
YB NB P0,
YA
P 3
理论力学
中南大学土木建筑学院
22
二、平面平行力系平衡方程 平面平行力系的平衡方程为:
Y 0
mO (Fi )0
一矩式
实质上是各力在x 轴上的投影恒 等于零,即 X 0 恒成立, 所以只有两个独立方程,只能 求解两个独立的未知数。
一、空间任意力系的平衡充要条件是:
R '0F 0 M O mO (Fi )0
又 R' (X )2 (Y )2 (Z )2
MO (mx (F ))2 (my (F ))2 (mz (F ))2
所以空间任意力系的平衡方程为:
X 0,mx (F )0 Y 0,my (F )0 Z 0,mz (F )0
再研究轮
mO (F )0
SAcosRM 0 X 0
X O SAsin 0
Y 0
S Acos YO 0
M PR XO P tg YO P
[负号表示力的方向与图中所设方向相反]
理论力学
中南大学土木建筑学院
大学理论力学__空间力系的平衡方程
二力矩式
X 0
M A 0
MB 0
条件是:AB两点的连线不能与 x 轴或 y 轴垂直
三力矩式
M A 0
MB 0
条件是:ABC三点不能共线
M C 0
上式有三个独立方程,只能求出三个未知数。
平面平行力系的平衡条件和平衡方程
如图:物体受平面平行力系F1 ,
y
F2 , …, Fn的作用。
如取 x 轴与各力垂直,不论力系是否
3.1.1平衡条件
从空间力系的简化结果可得到空间力系平衡 的必要和充分条件是力系的主矢和对任一点的主 矩为零,即:
'
FR 0
M0 0
3.1.2空间任意力系的平衡方程
Xi 0 ,Yi 0 , Zi 0
M x( Fi ) 0, M y( Fi ) 0, M z( Fi ) 0
空间力系平衡的必要与充分的解析条件是:力系 中各力在直角坐标系每一坐标轴上投影的代数和为零, 对每一坐标轴之矩的代数和为零。
解得:F 15.01kN Ax
FAy 5. 3 kN
F 17.33 kN
BC
A
D
B
E
3m
1m
2m
C
X 0,
FAx FBC cos30 0
FAy
M A(F ) 0,FBC AB sin30 P AD Q AE 0
A
M B (F ) 0,P DB Q EB FAy AB 0
距为4m。平衡荷重P3,到机中心
距离为6m。求:
P3
(1)保证起重机在满载
6m
和空载时都不致翻倒,平
衡荷重P3 为多少?
P1
P2
12m
(2)当平衡荷重P3 =180KN时,求满载时轨道A 、