理论力学4-4-平面力系的平衡方程
合集下载
理论力学L4-4 空间力系简化
c ) 一般主矢和主矩矢既不平行也不垂直 由共点矢量知,它们在同一平面内, 假设两矢量正向夹角为α。 ' FR 1) 将 M O分解为垂直于 ' ' ' 的 及平行于 F M R MO MO O " 的 MO , ' ' O M O 的大小: " FR ' MO M O M O sin
' b) 若主矢平行于主矩:FR // M o
O
MO
' 由一个力和一个力偶(且力 FR 垂直于力偶作用面)组成的
力系,称为力螺旋。 力和力偶都是基本力学量, 力螺旋不能再简化。
力偶矩矢与力矢同方向的称为右螺旋(力偶的转 向与力的方向符合右手关系);反之称左螺旋。 但一般主矢和主矩矢既不平行也不垂直。
§4-4 空间任意力系向一点简化
一、空间任意力系向一点简化 与平面任意力系向一点简化相似,空间任意力 系也是利用力的平移定理将各力平移到简化中 心 O 处,并附加矢量表示的空间力偶,则原力 系与空间汇交力系+空间力偶系等效。
MO m m1 n
F2 F’2
F’R
O
F’n
Fn
F’1 m2
F 又由于力偶矩矢是自由矢量,再将平行于 的 R '' 力偶矩矢 M o 平行移动与FR 重合,成为力螺旋。 一般情况下,空间力系简化结果是一个力螺旋。
约束类型
约束反力
数量
空 间 约 束 类 型 和 约 束 反 力
3
4
5 6
MO
F’R
对于空间汇交力系的合 ' 力FR :
O
' FR 等于该力系各力的矢量和, 称其为该力系的主矢; 对于空间力偶系的合力偶,其力偶矩矢 M O等于 各附加力偶矩的矢量和,也是力系中各力对点O 力矩矢的矢量和: MO mi mO ( Fi ) 称为该力系对简化中心O点的主矩。
平面一般力系的平衡方程及其应用

MB 0
W1
l 2
W
l
x
FAyl
0
得
FAy 7k N
Y 0
F T
sin
FAy
W1
W
0
得
FT 34k N
X 0 FAx FT cos 0
得
FAx FT cos 29.44k N
目录
平面力系\平面一般力系的平衡方程及其应用
4) 讨论。 本题若列出对A、B两点的力矩方程 和在x轴上的投影方程,即
F,平衡锤重WQ,已知W、F、a、b、e、l,欲使起重机满载和空载
时均不致翻倒,求WQ的范围。
目录
力系的平衡\平面力系的平衡方程及其应用 【解】 1)考虑满载时的情况 受力如图所示。 列平衡方程并求解 MB=0 WQmin(a+b)WeFl=0
得 We F l
WQmin a b
目录
平面力系\平面一般力系的平衡方程及其应用
理论力学
平面力系\平面一般力系的平衡方程及其应用
平面一般力系的平衡方程及其应用
1.1 平面一般力系的平衡方程
1. 基本形式 如果平面力系的主矢和对平面内任一点的主矩均为零,则力系
平衡。反之,若平面力系平衡,则其主矢、主矩必同时为零(假如 主矢、主矩有一个不等于零,则平面力系就可以简化为合力或合力 偶,力系就不平衡)。因此,平面力系平衡的充要条件是力系的主 矢和对任一点的主矩都等于零,即
应用平面力系的平衡方程求解平衡问题的步骤如下: 1) 取研究对象。根据问题的已知条件和待求量,选择合适的研 究对象。 2) 画受力图。画出所有作用于研究对象上的外力。 3) 列平衡方程。适当选取投影轴和矩心,列出平衡方程。 4) 解方程。 在列平衡方程时,为使计算简单,通常尽可能选取与力系中多 数未知力的作用线平行或垂直的投影轴,矩心选在两个未知力的交 点上;尽可能多的用力矩方程,并使一个方程只含一个未知数。
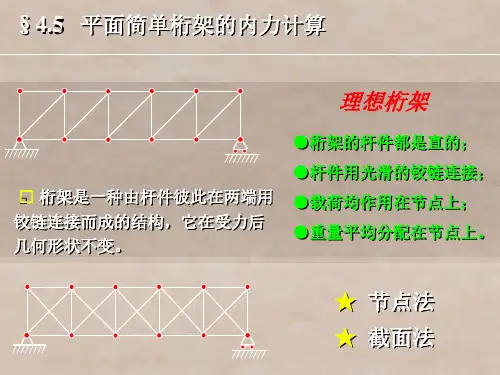
理论力学4.4第4-4章平面简单桁架的内力计算
20kN 1 A C 2 3 4 5 6 7 8 9 10 11 12 13 14 18 21 B 15 17 19 16 20
x y
0, F2 20 0 0, F1 0
解得: F1 0 F2 20kN
20kN
C
FAx F3 F4 FAy
10kN 10kN 10kN 10kN
F1
A
FBy
F2
FAx
解:(1) 取整体为研究对象
FAy
F1
(3) 取节点A为研究对象
F 0 , F F F cos 45 0 x Ax 4 3 F 0 , F F F sin 45 0 y Ay 1 3
F 0, F F 0, F M 0,
再以截面m-n左面部分为研究对象 MC 0
F3 A C FA F2 F4 F1
Fa F1b FA 2a 0 F1 4a F b
F
F
b
FB
例 题 4
C
求:桁架1、2杆的力。 解:(1) 取整体为研究对象
D a
M
解得:
a
B
0, P.2a FAy 3a 0
FAy 2P 3
α A E F FAC α α C α α
O α B C F G D FBC FGy FGx M
2M CG 2l cos 30 FBC 3l 参考受力图(b), 选x轴与FOB垂直。 ' O O F 0 , F . COS 30 F . COS 60 0 x BC AB
Fi Fix i Fiy j FR
i 1 i 1 i 1
n
n
n
x y
0, F2 20 0 0, F1 0
解得: F1 0 F2 20kN
20kN
C
FAx F3 F4 FAy
10kN 10kN 10kN 10kN
F1
A
FBy
F2
FAx
解:(1) 取整体为研究对象
FAy
F1
(3) 取节点A为研究对象
F 0 , F F F cos 45 0 x Ax 4 3 F 0 , F F F sin 45 0 y Ay 1 3
F 0, F F 0, F M 0,
再以截面m-n左面部分为研究对象 MC 0
F3 A C FA F2 F4 F1
Fa F1b FA 2a 0 F1 4a F b
F
F
b
FB
例 题 4
C
求:桁架1、2杆的力。 解:(1) 取整体为研究对象
D a
M
解得:
a
B
0, P.2a FAy 3a 0
FAy 2P 3
α A E F FAC α α C α α
O α B C F G D FBC FGy FGx M
2M CG 2l cos 30 FBC 3l 参考受力图(b), 选x轴与FOB垂直。 ' O O F 0 , F . COS 30 F . COS 60 0 x BC AB
Fi Fix i Fiy j FR
i 1 i 1 i 1
n
n
n
理论力学第3章 力系的平衡条件与平衡方程
10
例题二的解答
解:选取研究对象:杆CE(带有销 钉D)以及滑轮、绳索、重物组成 的系统(小系统)受力分析如图, 列平衡方程:
M D (F ) 0 M C (F ) 0 M B (F ) 0
( F C cos ) CD F ( DE R ) PR 0 F Dx DC F ( CE R ) PR 0 F BD F ( DE R ) P ( DB R ) 0 Dy
2012年11月3日星期六
北京邮电大学自动化学院
29
滚动摩擦力偶的性质
滚动摩擦力偶M 具有如下性质(与滑动摩擦力性质类似): ◆ 其大小由平衡条件确定; ◆ 转向与滚动趋势相反; ◆ 当滚子处于将滚未滚的平衡临界状态时, M = M max =δFN
式中:δ —滚动摩擦系数,它的量纲为长度; FN —法向反力(一般由平衡条件确定)。
q (2a b) 2a
2
YA q (2a b)
16
2012年11月3日星期六
北京邮电大学自动化学院
课堂练习3
多跨静定梁由AB梁和BC梁用中间铰B连接而成,支撑和荷 载情况如图所示,已知P = 20kN,q=5kN⋅m,α = 45°。求 支座A、C的反力和中间铰B处的反力。
2012年11月3日星期六
x
xC
x
2012年11月3日星期六
北京邮电大学自动化学院
5
平行分布线载荷的简化
Q
q
1、均布荷载 Q=ql
l 2
l 2
Q
q
2、三角形荷载 Q=ql /2
2l 3
l 3
Q
3、梯形荷载 Q=(q1+q2)l /2 (自己求合力的位置)
第四章:力系的平衡条件与平衡方程
未知量个数 <= 独立平衡方程数 静定
(全部未知量可以由平衡方程完全求解)
未知量个数 > 独立平衡方程数 静不定或超静定
(未知量不能全部由平衡方程求解)
物体系的平衡·静定和超静定问题
未知量个数 <= 独立平衡方程数 静定
(全部未知量可以由平衡方程完全求解)
未知量个数 > 独立平衡方程数 静不定或超静定
∑ M B = 0 −8FAy + 5*8 +10*6 +10* 4 +10* 2 = 0
得 FAy = 20kN ∑ Fiy = 0 FAy + FBy − 40 = 0
得 FBy = 20kN
求各杆内力
取节点A
⎧⎪∑ ⎨⎪⎩∑
Fiy Fix
= =
0 0
→ →
FAD FAC
取节点C
⎧⎪∑ ⎨⎪⎩∑
解得 P3max=350kN
22mm 22mm
所以,平衡载重P3取值范围为:
75kN ≤ P3 ≤ 350kN
(2)P3=180kN时:
∑ M A = 0 4P3 − 2P2 −14P1 + 4FB = 0
解得 FB=870kN
∑ Fy = 0 FA + FB − P1 − P2 − P3 = 0
∑M =0
FA'
⋅r
sinθ
− M2
=
0
解得 M 2 = 8kN ⋅m
FB = FA = 8kN
例
已知:OA=R,AB=
l,
r F
,
不计物体自重与摩擦,系统在图示位置平衡;
求: 力偶矩M 的大小,轴承O处的约 束力,连杆AB受力,滑块给导 轨的侧压力.
理论力学:第3 章 力系的平衡
第 3 章 力系的平衡
力系平衡是静力学研究的主要内容之一,也是静力学最重要的内容。其中平面力系的平衡又
是重要之重要内容,平面物系的平衡又是重要之重要内容。
事实上我们已经得到力系的平衡条件(充要):
R
0,M O
0 。下面将其写成代数方程即
平衡方程,用其解决具体问题。
3.1 平面力系的平衡条件与平衡方程
受力图如图(c),列解方程:
Y 0, P cos G sin 0
P
使 P 最小,则
G sin cos
G sin cos( )
cos( ) 1,
arctan 3
3652'
Pmin
G sin
20
3 5
12kN
4
另解:(几何法) 画自行封闭的力三角形,如图(d),则
Q
G(b
e) 50b a
Hale Waihona Puke 350.0kN∴ 使起重机正常工作的平衡重为:333.3kN≤Q≤350.0kN 注:也可按临界平衡状态考虑,求 Pmin 和 Pmax。 静力学的应用:
学习静力学有何用处?——上面几个例题有所反映。
例 1:碾子问题——满足工作条件的载荷设计。
例 2:梁平衡问题——结构静态设计(一类重要工程问题)。
分由由由图图图析(((:acb)))汽:::车受平面平行力mmm系EBB(((,FFF))易) 列解000,,,方程。下shl面只给出方程:
例 4 平行力系典型题目,稳定性问题且求范围。 行动式起重机的稳定性极其重要,要求具有很好的稳定裕度,满载时不向右翻倒,空载时不 向左翻倒。已知自重 G = 500kN,最大载荷 Pmax = 210kN,各种尺寸为:轨距 b = 3m,e = 1.5m, l = 10m,a = 6m,试设计平衡重 Q,使起重机能正常工作,且轨道反力不小于 50kN。
力系平衡是静力学研究的主要内容之一,也是静力学最重要的内容。其中平面力系的平衡又
是重要之重要内容,平面物系的平衡又是重要之重要内容。
事实上我们已经得到力系的平衡条件(充要):
R
0,M O
0 。下面将其写成代数方程即
平衡方程,用其解决具体问题。
3.1 平面力系的平衡条件与平衡方程
受力图如图(c),列解方程:
Y 0, P cos G sin 0
P
使 P 最小,则
G sin cos
G sin cos( )
cos( ) 1,
arctan 3
3652'
Pmin
G sin
20
3 5
12kN
4
另解:(几何法) 画自行封闭的力三角形,如图(d),则
Q
G(b
e) 50b a
Hale Waihona Puke 350.0kN∴ 使起重机正常工作的平衡重为:333.3kN≤Q≤350.0kN 注:也可按临界平衡状态考虑,求 Pmin 和 Pmax。 静力学的应用:
学习静力学有何用处?——上面几个例题有所反映。
例 1:碾子问题——满足工作条件的载荷设计。
例 2:梁平衡问题——结构静态设计(一类重要工程问题)。
分由由由图图图析(((:acb)))汽:::车受平面平行力mmm系EBB(((,FFF))易) 列解000,,,方程。下shl面只给出方程:
例 4 平行力系典型题目,稳定性问题且求范围。 行动式起重机的稳定性极其重要,要求具有很好的稳定裕度,满载时不向右翻倒,空载时不 向左翻倒。已知自重 G = 500kN,最大载荷 Pmax = 210kN,各种尺寸为:轨距 b = 3m,e = 1.5m, l = 10m,a = 6m,试设计平衡重 Q,使起重机能正常工作,且轨道反力不小于 50kN。
华北电力大学理论力学第四章 物体系的平衡
1.刚体系的静定和超静定
由多个刚体相互约束组成的系统称为刚体系。在一般情况下,若系统 是静定的,则刚体系的未知变量总数必等于独立方程总数。静定的 刚体系也称为静定结构。若未知变量总数大于独立方程总数,则系 统是超静定的,称为超静定结构。若未知变量总数小于独立方程总 数,则为不完全约束,刚体系可产生运动而不可能平衡。受不完全 约束的刚体系通常称为机构。
G FAB FAC (a) A G
y
x
例4-3
平面刚架的各部分及受力如图4-7(a)所示,A端为固定端约束,图中 各参数q、F、M、L均为已知。试求A端的约束力。 解:以刚架ABCD整体为研究对象 列平衡方程
F F
x y
0 , FAx qL 0 0 , FAy F 0
3 M M M F L qL L0 0 , A A 2
主矢
0 FR
F F F
ix
iy iz
0 0 0
主矩 M O 0
(对任意点主矩)
M x (F i) 0 M y (F i) 0 M z ( Fi ) 0
共六个独立方程,可解出六个未知量。
特殊力系平衡方程
空间汇交力系
可列三个独立方程
Fix 0 Fiy 0 Fiz 0
F
x
0 , FAB cos30 F 0
得
FAB
2 F 3
A
FAB M
(2)再取OA为研究对象
M
O
( F ) 0 , FAB cos 30 r M 0
FOx
O FOy
解得
M Fr
例题 三刚体平衡
求A、B、D、G处约束。
由多个刚体相互约束组成的系统称为刚体系。在一般情况下,若系统 是静定的,则刚体系的未知变量总数必等于独立方程总数。静定的 刚体系也称为静定结构。若未知变量总数大于独立方程总数,则系 统是超静定的,称为超静定结构。若未知变量总数小于独立方程总 数,则为不完全约束,刚体系可产生运动而不可能平衡。受不完全 约束的刚体系通常称为机构。
G FAB FAC (a) A G
y
x
例4-3
平面刚架的各部分及受力如图4-7(a)所示,A端为固定端约束,图中 各参数q、F、M、L均为已知。试求A端的约束力。 解:以刚架ABCD整体为研究对象 列平衡方程
F F
x y
0 , FAx qL 0 0 , FAy F 0
3 M M M F L qL L0 0 , A A 2
主矢
0 FR
F F F
ix
iy iz
0 0 0
主矩 M O 0
(对任意点主矩)
M x (F i) 0 M y (F i) 0 M z ( Fi ) 0
共六个独立方程,可解出六个未知量。
特殊力系平衡方程
空间汇交力系
可列三个独立方程
Fix 0 Fiy 0 Fiz 0
F
x
0 , FAB cos30 F 0
得
FAB
2 F 3
A
FAB M
(2)再取OA为研究对象
M
O
( F ) 0 , FAB cos 30 r M 0
FOx
O FOy
解得
M Fr
例题 三刚体平衡
求A、B、D、G处约束。
理论力学平面力系的简化和平衡
原力偶系的合力偶矩
n
M Mi i 1
只受平面力偶系作用的刚体平衡充要条件:
n
M Mi 0 i 1
对BC物块对B点取矩,以逆时针为正列方程应为:
M 2 M B (FC ) M FCY a FCx b M FC (b a) cos45 0
[例] 在一钻床上水平放置工件,在工件上同时钻四个等直径 的孔,每个钻头的力偶矩为 m1m2 m3 m4 15Nm 求工件的总切削力偶矩和A 、B端水平反力?
两轴不平行即 条件:x 轴不 AB
可,矩心任意
连线
mA (Fi ) 0 mB (Fi ) 0 mC (Fi ) 0
③三矩式 条件:A,B,C不在
同一直线上
上式有三个独立方程,只能求出三个未知数。
4. 平面一般力系的简化结果分析
简化结果: 主矢R ,主矩 MO ,下面分别讨论。 ① R =0, MO =0,则力系平衡,下节专门讨论。 ② R =0,MO≠0 即简化结果为一合力偶, MO=M 此时刚
解除约束,可把支反
力直接画在整体结构
的原图上)
解除约束
由
mA (Fi
)
0
P2a N B
3a0,
N B
2P 3
X 0 XA 0
Y 0 YB NB P0,
YA
P 3
2.5物体系统的平衡、静定与超静定问题
1、物体系统的平衡问题 物体系统(物系):由若干个物体通过约束所组成的系统叫∼。 [例]
外力:外界物体作用于系统上的力叫外力。 内力:系统内部各物体之间的相互作用力叫内力。
N2个物体受平面汇交力系(或平面平行力系)
X 0 Y 0
2*n2个独立平衡方程
N3个物体受平 X 0 面任意力系 Y 0
理论力学第4章-平面任意力系
FAx
FAy MA
解:(1)取悬臂刚架为研究对象,受力图。
(2)列平衡方程
Fx 0
FAx F 0
Fy 0
FAy 3q 0
解之得
MA(F) 0
M A F 4 3q 1.5 0
FAx 5kN FAy 6kN M A 11 kN m(与假设相反)
4.5.2 平面平行力系的平衡方程 作用线分布在同一平面内且相互平行的力系,称为平 面平行力系。
MO (F ) 2 OAB面积
(1)当力F通过矩心O时,力对该矩心的力矩为零。 (2)当力F沿作用线移动时,不改变该力对任一点的矩。
力对点之矩的解析式:
MO (F ) Fd Fr sin( ) Fr sin cos Fr cos sin
Fr cos Fx
r cos x
Fr sin Fy
合力矢 作用线的方程。
MO FRx
O
38.66
F Ry
F R
(x, y) FRx
400 x + 500 y = 2726.7
O
FRy
FR
4.5 平面任意力系、平面平行力系平衡方程 4.5.1 平面任意力系的平衡方程 平面任意力系平衡的必要与充分条件为:力系的
主矢以及对作用面内任一点的主矩都等于零,即
r sin y
MO (F ) xFy yFx (4-4)
y
Fy
F
y
r O d
A Fx
x
x
4.2 力线平移定理
力线平移定理: 作用在刚体上A点的力F可以平行 移到任一点B,但必须同时附加一个力偶,此附加力 偶的矩等于原来的力F对B点的矩。
[证] 力 F
力系 F, F1, F1' 力F1 力偶(F, F1')
理论力学课件—力系的平衡
分布荷载的合力及其作用线位置 P
q(x)
dP
A
x dx h l
由合力之矩定理:
B
x
Ph dP x q( x) xdx
l 0
q(x)
荷载集度
合力作用线位置:
dP=q(x)dx 合力大小:
P dP 0 q( x)dx
l
q( x) xdx h q( x)dx
0 l 0
q A 2a
M B
C
G 4a
FAx
FB
解:以水平横梁AB为研究对象。
X 0, F 0 M A F 0,
Ax
FB 4a G 2a q 2a a M 0 3 1 FB G qa 4 2
Y 0, F
Ay
q 2a G FB 0
FAx
y
X 0,
M A ( F ) 0,
FAx P 0
FAx P
x
FB 2a M Pa 0
FB P
Y 0,
FAy FB 0
FAy P
2a M
P
a
C
FAy
D
FB
解法2
A
FAx
B
解法3
M A ( F ) 0, M B ( F ) 0, M C ( F ) 0,
即
2M FA FB ab
§3.3 平面任意力系的平衡条件与平衡方程
1. 平面任意力系的平衡方程
FR=0 ′ Mo=0
X 0 Y 0 M F 0
O
}
平衡方程
平面任意力系平衡的解析条件:所有各力在两个任选的坐标轴上 的投影的代数和分别等于零,以及各力对于任意一点的矩的代数 和也等于零。 ● 几点说明:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
i 1 n
M Az 0
M Bz 0
三矩式 (A、B、C三点不共线)
M Az 0
2013年10月22日
M Bz 0
M Cz 0
2/14
刚体平衡问题的解题步骤和注意事项
第 4章 1. 正确选取研究对象,取分离体,画受力图。 2. 建立坐标系,列力系平衡方程。力矩轴应 和尽量多的未知力相交或平行(一个方程 解一个未知数)。 3. 解平衡方程式,校核结果。
从这三个方程可以解出NA,NB 和 。
14/14
3
几何静力学
O
arccos
A
B
Q
B
90
D
F
C
W
10/14
解法一
NA
一矩式
y
O
解法二
第 4章
NA
两矩式
y
O
C A
பைடு நூலகம்
x
B
NB
P
D
C A
x
B
NB
P
P
D
几何静力学
P
Rx N B sin N A cos 0
R y N B cos N A sin 2 P 0
几何静力学 几何静力学
几何静力学
一矩式外,应学会灵活应用其它两种形式, 以及二力平衡和三力平衡条件。
最好先用文字符号表示求解结果,并用量
A D B
纲校核后,再代入数据求出数值解。
4/14
P
例 4-4-1
选择吊车梁为研究对象,取坐标系Oxy y l a TB TB
RA
解
第 4章
例 4-4-2
已知起重机重P,可绕铅直轴AB转动,起吊 重量为Q的物体。起重机尺寸如图示。 求止推轴承A和轴承B处约束反力。
对于平面一般力系的刚体平衡问题,除了
例 4-4-1
第 4章 AB是吊车梁,BC是钢索,A端支承可简化为铰 链支座。设已知电葫芦和提升重物共重 P=5 kN, = 25º,AD长度a= 2m,AB长度l = 2.5m。 吊车梁的自重略去不计,求钢索BC和铰A的约 束力。 C
3/14
第 4章
5/14
O
B
P
A
D
O
P
RA
几何静力学
x
RA cos TB cos 0
P RA sin TB sin 0
其它求解方法?
(l a) tan OD BD tan tan AD AD a
RA 8.63kN
TB 9.46kN
6/14
1
Rx N B sin N A cos 0
N B 2 P cos ,
1 π
4
2
N A 2 P sin
16
2 1 arcsin 9
3 π 1 arcsin 9
2 2
能否用Ry = 0 ?
16
12/14
从这三个方程可以解出NA,NB 和。
2
解法三
平面力系平衡方程的各种形式
第 4章 一矩式 (标准形式)
Rx Fix 0
i 1 n n
Ry Fiy 0
i 1
n
几何静力学
4.4 平面力系的平衡方程
M Oz ( xi Fiy yi Fix ) 0
i 1
二矩式 (AB连线不与矢量e垂直)
Re Fie 0
第 4章
NA
三矩式
y
O
第 4章
B
NB
C A
x
P
D
13/14
几何静力学
几何静力学
P
M Az NB a cos P(l a sin )sin P[(l a cos )cos a] 0 M Bz N Aa sin P[(l a sin )sin a] P(l a cos )cos 0 M Oz N Aa sin NB a cos Pl sin Pl cos 0
M Oz N A a sin N B a cos Pl sin Pl cos 0
MAz NBa cos P(l a sin)sin P[(l a cos)cos a] 0
M Bz N A a sin P[(l a sin ) sin a ] P (l a cos ) cos 0
解
第 4章
例 4-4-4
直角尺两边长均为2l,AB = a = 0.4l, 求平衡 时A、B处的约束反力和角。
因为ADE 是直角,所以E一定在圆周上,
AE 2 R
OAD ODA l cos AF 2 R cos 2
E O R N l
A
2 l l 1 8R 8R 2
例 4-4-2
第 4章 (1) 明确对象,取分离体,画受力图。 (2) 列写适当平衡方程,由已知求未知。
M Az 0 N B
NB a P b Q c 0
解
第 4章
例 4-4-3
半径为 R的半球形碗内搁一均匀杆AB。杆长 2l, 设 2 R l R , 且为光滑接触。求杆平衡 时的倾角 。
7/14
第 4章
9/14
第 4章
11/14
几何静力学 几何静力学 几何静力学
几何静力学
B
N B ( Pb Qc) / a
Rx 0 N Ax N B
Ry 0 N Ay P Q
A
思考:如何利用平衡 方程的其它形式?
8/14
例 4-4-3
确定杆为对象,作受力分析。
M Az 0
M Bz 0
三矩式 (A、B、C三点不共线)
M Az 0
2013年10月22日
M Bz 0
M Cz 0
2/14
刚体平衡问题的解题步骤和注意事项
第 4章 1. 正确选取研究对象,取分离体,画受力图。 2. 建立坐标系,列力系平衡方程。力矩轴应 和尽量多的未知力相交或平行(一个方程 解一个未知数)。 3. 解平衡方程式,校核结果。
从这三个方程可以解出NA,NB 和 。
14/14
3
几何静力学
O
arccos
A
B
Q
B
90
D
F
C
W
10/14
解法一
NA
一矩式
y
O
解法二
第 4章
NA
两矩式
y
O
C A
பைடு நூலகம்
x
B
NB
P
D
C A
x
B
NB
P
P
D
几何静力学
P
Rx N B sin N A cos 0
R y N B cos N A sin 2 P 0
几何静力学 几何静力学
几何静力学
一矩式外,应学会灵活应用其它两种形式, 以及二力平衡和三力平衡条件。
最好先用文字符号表示求解结果,并用量
A D B
纲校核后,再代入数据求出数值解。
4/14
P
例 4-4-1
选择吊车梁为研究对象,取坐标系Oxy y l a TB TB
RA
解
第 4章
例 4-4-2
已知起重机重P,可绕铅直轴AB转动,起吊 重量为Q的物体。起重机尺寸如图示。 求止推轴承A和轴承B处约束反力。
对于平面一般力系的刚体平衡问题,除了
例 4-4-1
第 4章 AB是吊车梁,BC是钢索,A端支承可简化为铰 链支座。设已知电葫芦和提升重物共重 P=5 kN, = 25º,AD长度a= 2m,AB长度l = 2.5m。 吊车梁的自重略去不计,求钢索BC和铰A的约 束力。 C
3/14
第 4章
5/14
O
B
P
A
D
O
P
RA
几何静力学
x
RA cos TB cos 0
P RA sin TB sin 0
其它求解方法?
(l a) tan OD BD tan tan AD AD a
RA 8.63kN
TB 9.46kN
6/14
1
Rx N B sin N A cos 0
N B 2 P cos ,
1 π
4
2
N A 2 P sin
16
2 1 arcsin 9
3 π 1 arcsin 9
2 2
能否用Ry = 0 ?
16
12/14
从这三个方程可以解出NA,NB 和。
2
解法三
平面力系平衡方程的各种形式
第 4章 一矩式 (标准形式)
Rx Fix 0
i 1 n n
Ry Fiy 0
i 1
n
几何静力学
4.4 平面力系的平衡方程
M Oz ( xi Fiy yi Fix ) 0
i 1
二矩式 (AB连线不与矢量e垂直)
Re Fie 0
第 4章
NA
三矩式
y
O
第 4章
B
NB
C A
x
P
D
13/14
几何静力学
几何静力学
P
M Az NB a cos P(l a sin )sin P[(l a cos )cos a] 0 M Bz N Aa sin P[(l a sin )sin a] P(l a cos )cos 0 M Oz N Aa sin NB a cos Pl sin Pl cos 0
M Oz N A a sin N B a cos Pl sin Pl cos 0
MAz NBa cos P(l a sin)sin P[(l a cos)cos a] 0
M Bz N A a sin P[(l a sin ) sin a ] P (l a cos ) cos 0
解
第 4章
例 4-4-4
直角尺两边长均为2l,AB = a = 0.4l, 求平衡 时A、B处的约束反力和角。
因为ADE 是直角,所以E一定在圆周上,
AE 2 R
OAD ODA l cos AF 2 R cos 2
E O R N l
A
2 l l 1 8R 8R 2
例 4-4-2
第 4章 (1) 明确对象,取分离体,画受力图。 (2) 列写适当平衡方程,由已知求未知。
M Az 0 N B
NB a P b Q c 0
解
第 4章
例 4-4-3
半径为 R的半球形碗内搁一均匀杆AB。杆长 2l, 设 2 R l R , 且为光滑接触。求杆平衡 时的倾角 。
7/14
第 4章
9/14
第 4章
11/14
几何静力学 几何静力学 几何静力学
几何静力学
B
N B ( Pb Qc) / a
Rx 0 N Ax N B
Ry 0 N Ay P Q
A
思考:如何利用平衡 方程的其它形式?
8/14
例 4-4-3
确定杆为对象,作受力分析。