5.1 连杆的速度和加速度
第一节 活塞、连杆的运动及其作用力

x′2= (2ω)sin2 *λR /4
=0°(上止点)或=180°(下止点),x′ =0, 最大速度x′max出现在α<90°的某一位置
3 活塞的加速度 X″≈ω2cos *R + (2ω) 2cos2 *λR /4 X″= x″1+x″2 x″ 1=ω2cos *R ,是一次曲柄的向心加速 度在气缸中心线的投影 x″2= (2ω) 2cos2 *λR /4,是二次曲柄 的向心加速度在气缸中心线的投影 α=0°时, x″max=Rω2 (1+λ),方向向下, 最大 α=180°时, x″= -Rω2(1-λ),方向向上 α<90°或α>270°的某个位置x″ =0(此 时活塞速度最大)
α=0°时,x=0(即活塞在上止点)
α=180°时,x=2R=S(即活塞在下止点)
R 2
α=90°或270°时,x=R+ >R ,即活塞不 在行程ห้องสมุดไป่ตู้央,而在α90°或 α270°的某一 位置时X=R
2活塞的速度
X′≈ω*sin *R + (2ω)sin2 *λR /4
x′=x′1+x′2
第六章 柴油机及推进轴系的振动
船舶推进轴系产生: (1)扭转振动 (2)纵向振动 (3)回旋(横向)振动 振动危害: (1)机件磨损增加或损坏 (2)降低柴油机经济性和可靠性 (3)引起船体水平、垂向振动(对底脚螺栓、 贯穿螺栓影响大,对气缸盖影响小) (4)影响船员工作条件,损害船员健康
第一节
活塞、连杆的运动及其作用力
五、曲轴回转不均匀度 1.定义:曲轴回转最大角速度与最小角速 度之差与平均角速度之比 2.原因:动力输出不均(四冲程机相对大) 3.影响因素: (1)气缸数 多则不均匀度小 (2)飞轮 小则不均匀度大 (3)柴油机行程 长超长则不均匀度大 (4)负荷不均、封缸运行 、单缸熄火、 爆压过高、风浪天航行导致不均匀度增 大
理论力学06_4刚体平面运动_加速度

§6.3* 平面运动刚体上点的加速度由于平面运动可以看成是随同基点的牵连平移与绕基点的相对转动的合成运动,于是图形上任一点的加速度可以由加速度合成定理求出。
设已知某瞬时图形内A 点的加速度a A ,图形的角速度为ω,角加速度为α,如图6-13所示。
以A 点为基点,分析图形上任意一点B 的加速度a B 。
因为牵连运动为动坐标系随同基点的平移,故牵连加速度a e =a A 。
相对运动是点B 绕基点A 的转动,故相对加速度a r =a BA ,其中a BA 是点B 绕基点A 的转动加速度。
由式 (5.3.7)可得图6-13 加速度分析的基点法 α (6.3.1) BA A B αα+=由于B 点绕基点A 转动的加速度包括切向加速度和法向加速度a ,故式(6.3.1)可写为t BA a n BAa (6.3.2) n t BA BA A B a a a ++=即平面图形上任意一点的加速度,等于基点的加速度与该点绕基点转动的切向加速度和法向加速度的矢量和。
当基点A 和所求点B 均作曲线运动时,它们的加速度也应分解为切向加速度和法向加速度的矢量和,因此,式(6.3.2)可表示为(6.3.3)n t n t n t BA BA A A B B a a a a a a +++=+在式(6.3.3)中,相对切向加速度与点A 和B 连线方向垂直,相对法向加速度沿点A 和B连线方向从B 指向A ;仅当点A 和B 的运动轨迹已知时,才可以确定点A 和B 的切向加速度a 和及法向加速度和a 。
t BA a n BA a t A t B a n A a n B 在应用式(6.3.2)或(6.3.3)计算平面图形上各点的加速度时,只能求解矢量表达式中的两个要素。
因此在解题时,要注意分析所求问题是否可解。
当问题可解时,将式(6.3.2)或(6.3.3)在平面直角坐标系上投影,即可由两个代数方程联立求得所需的未知量。
例6.3-2:半径为R 的车轮沿直线滚动,某瞬时轮心O 点的速度为v O ,加速度为a O ,如图a 所示。
机器人学导论第六章

期望求出期望的关节力矩矢量τ。这个运动 学公式对操作臂控制问题(第10章)很有 用。第二个问题是计算施加在一组关节力 矩的情况下关节如何运动。也就是已知一 个关节矢量τ,计算出操作臂运动的
, 和 。这对操作臂的仿真很有用。
6.2 刚体的加速度
在任一瞬时对刚体的线速度和加速度进行 求导,可分别得到线加速度和量矩阵, V θ,θ是n×1
的离心力和哥氏力矢量, Gθ 是重力矢量。上式
之所以成为状态空间方程,是因为式中 V θ,θ取
决于位置和速度。M θ和 Gθ 中的元素都是关于
操作臂所有关节位置θ的复杂函数,而 V θ,θ中 的
元素都是关于 和的 复杂函数。
可以看出惯性张量是坐标系位姿的函数。众所 周知的平行移轴定理就是在参考坐标系平移是 惯性张量如何变化的计算方法。平行移轴定理 描述了一个以刚体质心为原点的坐标系平移到 另一个坐标系是惯性张量的变换关系。
假设{C}是以刚体质心为原点的坐标系,{A}为任 意平移后的坐标系,则平行移轴定理可表示为
式中 PC xc yczc T 表示刚体质心在坐标系{A}中的位
机器人学导论
第6章 操作臂动力学
第六章 操作臂动力学
6.1概述 到目前为止,我们只研究了操作臂的运动
学。我们已研究了静态位置、静态力和速 度;但是从未考虑引起运动所需的力。在 本章中,将考虑操作臂的运动学方程—— 由驱动器施加的力矩或施加在操作臂上的 外力是操作臂运动。
与 第一操个作臂问动题力,学已有知关一的个两轨个迹问点题 有,待和解决。
计算速度和加速度的向外迭代法
为了计算作用在连杆上的惯性力,需要计算操作 臂每个连杆在某一时刻的角速度、线加速度和角 加速度。首先对连杆1进行计算,由第五章知识
曲柄连杆机构的运动与受力分析讲解学习
定义“曲拐当量质量”为:
则: Prqmqdr2
mqdmqx2mqbrb
如果曲拐的某一曲柄臂上设有平衡重,其质量为 m p ,而其质心
距曲轴轴线的距离为 p ,则平衡重的旋转惯性力为:
Prpmpp2r2mprp
定义“平衡重当量质量”为:
mpd
mp
p
r
(1-32)
则: Prpmpdr2 (1-33)
(2)活塞速度:在0 ºCA~90 ºCA之间和 270 ºCA~360 ºCA之间,活塞速度各出现 一个正极值和负极值。 (3)活塞加速度:在上止点前后活塞加 速度是正值,方向是活塞下行的方向,往 复惯性力朝上;在下止点前后活塞加速度 是负值,方向是活塞上行的方向,往复惯 性力朝下。根据极值方法求解,可得:
1.2.2.2 单个曲拐的旋转惯性力
曲轴上曲柄不平衡部 分的质量分为两部分:
(1)曲柄销部分:
图1-10 单曲拐的旋转惯性力
Prxmqxr2 (1-28)
(r为曲柄半径)
(2)曲柄臂部分: Prbmqbb2 (1-29)
( b 为曲柄臂质心至曲轴轴线的垂直距离)
整个曲拐的旋转惯性力就是:
P rq P rx 2 P rb r2 m q x2 m qbrb
由式(1-3)知:
arc s i(n1-12)
极值: e arcsin角速度: l Nhomakorabead
dt
cos cos
cos 1 2 sin 2
1 (1-13)
2
角速度极值:le
角加速度:l d d l t c s i o n d d s tc o c s s2 o i n s d d t
1.2.2.3 连杆的惯性力
四连杆机构加速度

第八章第二节刚体的平面运动平面图形上各点的速度(例题8-1)
例8-1 在图8-5所示的四连杆机构中,OA=r,AB=b,O
1
B=d,已知曲柄OA以匀角
速度ω绕轴O转动。
试求在图示位置时,杆AB的角速度ω
AB 以及摆杆O
1
B的角
速度ω
1。
【解】
杆OA和O
1
B作定轴转动,杆AB作平面运动。
由OA作定轴转动可知点A的速度
v
A
的大小为,方向垂直于OA,水平向左。
杆AB作平面运动,取点A为基点,由基点法得点B速度的矢量表达式为
式中v A的大小和方向均为已知,点B相对于基点A的速度v BA的方向与AB垂直,点B的速度v B与O1B垂直。
这样上式中四个要素是已知的,在点B作出其速度平行四边形如图8-5所示,作图时应注意使v B位于平行四边形的对角线上。
由几何关系得
于是得到此瞬时杆AB平面运动的角速度为
摆杆O
1B绕轴O
1
转动的角速度为
转向如图8-5所示。
如果本题只需求摆杆O
1B的角速度ω
1
,则可用速度投影定理求v B。
由
得
结果与上面相同。
4_UPS_CPC并联机构运动学分析_张海强_侯红娟_崔国华_徐丰

4-UPS-CPC 并联机构运动学分析张海强,侯红娟,崔国华,徐丰(河北工程大学装备制造学院,河北邯郸056038)来稿日期:2014-01-02基金项目:国家自然科学基金资助项目(51175143)作者简介:张海强,(1986-),男,山东潍坊人,硕士研究生,主要研究方向:并联构型装备及机器人技术1引言并联机构的运动学分析是并联机构研究的重要对象之一,是进行优化分析的重要依据[1]。
并联机构的运动学性能包括机构的灵巧性、奇异性、工作空间、精度等多种工作性能。
目前,国内外许多知名学者通过理论求解和软件仿真分析对并联机构进行了多方面的研究。
文献[2]对空间三自由并联机构4-SPS/CU 进行了运动学和工作空间以及奇异位形分析,文献[3]对4-UPS-UPU 并联坐标测量机床的灵巧度进行了详细的研究,文献[4]对5UPS-PRPU 的5自由度并联机床进行了运动学分析,文献[5]对新型4-SPS/PPU 并联机构的运动学进行了速度、加速度理论分析。
以能够实现空间5自由度,含有4条驱动支链、1条恰约束主动支链的4-UPS-CPC 机构为研究对象,建立了位置、速度、加速度求解的运动学模型,运用Matlab 和RecurDyn 软件,采用数值求解与仿真分析对该机构进行运动学分析,结果表明,二者得到的机构正解与逆解结果一致。
24-UPS-CPC 并联机构模型2.1机构描述4-UPS-CPC 并联机构由动平台、定平台、连接动定平台的4个驱动支链和中间1条恰约束主动支链组成,如图1所示。
定平台通过4个完全相同的驱动分支UPS (胡克铰-移动副-球副)与动平台连接,恰约束驱动分支由一个移动副P 和2个圆柱副C 按照C-P-C 的顺序依次连接定平台和动平台[6]。
2.2自由度分析根据Chebyshev-Grubler-Kutzbach (CGK )公式,空间自由度[7]的计算:摘要:并联机构的运动学分析是并联机构研究的重要对象之一,是进行优化分析的重要依据。
平面连杆机构的行程速度变化系数k

平面连杆机构的行程速度变化系数k平面连杆机构的行程速度变化系数k是指变差异性机构中有限行程件(如连接线)当其位于中间位置时,其行程速度偏差率最大的情况下会有那么一定程度的行程速度变化,因此行程速度变化系数K就是这一变化值的比率。
1、行程速度变化系数k的概念行程速度变化系数K就是有效摆动行程中,行程运动学能量的衰减率,即输出关节的行程速度与输入关节的行程速度之比。
行程速度变化系数K可以衡量连杆机构的运动性能,也是衡量连杆机构精度的重要参数。
2、行程速度变化系数k的计算行程速度变化系数K的计算分为两个步骤,分别是求时间曲线和求k 值。
(1)求时间曲线。
连杆机构在各行程限位处停止运行(或者经过某个极限位置)后,用测速仪按位置、速度或加速度在运动时间曲线上抽取几组数据,然后采用曲线拟合的方法求得运动曲线。
(2)求k值。
对连杆机构采用正弦步进信号输入,用多次运动曲线求出输入关节和输出关节之间当位置在固定位置(一般取中位置、最大小步中位置)处时的行程速度形成表格,然后用比例系数法求出有限行程件的行程速度变化系数K。
3、行程速度变化系数k的应用(1)行程速度变化系数K对有效摆动行程、行程精度有一定的影响,有利于优化机构的设计,提高连杆机构的运行性能。
(2)行程速度变化系数K是变差异性机构中设计参数之一,K的值表示正常位置输出关节的行程速度变化程度,变化的越大,其性能越差。
(3)行程速度变化系数K可以用于控制连杆机构衔铰机构圆周运动仿真分析,实现机构性能参数的优化设计。
(4)行程速度变化系数K可以拿来匹配工件尺寸和机构运动质量,以优化机构结构。
(5)行程速度变化系数K是有效摆动行程中,行程运动学能量的衰减率,所以也可以用来表示连杆机构的能量效率。
可以看出,行程速度变化系数K在连杆机构的设计中至关重要,它是优化机构结构的依据,并且与机构的运行质量相关,因此平面连杆机构的行程速度变化系数k不容忽视。
《工程力学》课后习题答案全集
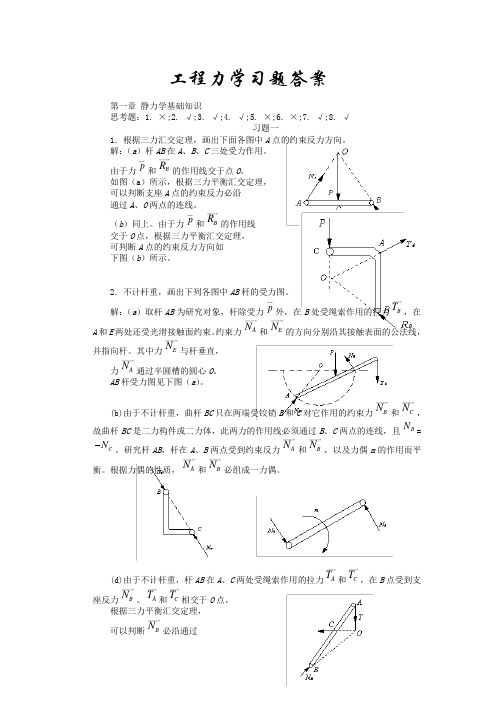
工程力学习题答案第一章 静力学基础知识思考题:1. ×;2. √;3. √;4. √;5. ×;6. ×;7. √;8. √习题一1.根据三力汇交定理,画出下面各图中A 点的约束反力方向。
解:(a )杆AB 在A 、B 、C 三处受力作用。
由于力和的作用线交于点O 。
如图(a )所示,根据三力平衡汇交定理, 可以判断支座A 点的约束反力必沿 通过A 、O 两点的连线。
(b )同上。
由于力和的作用线 交于O 点,根据三力平衡汇交定理, 可判断A 点的约束反力方向如 下图(b )所示。
2.不计杆重,画出下列各图中AB 杆的受力图。
解:(a )取杆AB 为研究对象,杆除受力外,在B 处受绳索作用的拉力,在A 和E 两处还受光滑接触面约束。
约束力和的方向分别沿其接触表面的公法线,并指向杆。
其中力与杆垂直,力通过半圆槽的圆心O 。
AB 杆受力图见下图(a )。
(b)由于不计杆重,曲杆BC 只在两端受铰销B 和C 对它作用的约束力和,故曲杆BC 是二力构件或二力体,此两力的作用线必须通过B 、C 两点的连线,且=。
研究杆AB ,杆在A 、B 两点受到约束反力和,以及力偶m 的作用而平衡。
根据力偶的性质,和必组成一力偶。
(d)由于不计杆重,杆AB 在A 、C 两处受绳索作用的拉力和,在B 点受到支座反力。
和相交于O 点,根据三力平衡汇交定理,可以判断必沿通过pB RpB Rp B T A N E N E N A N B N C N BN CN A N B N A N B N A T C T B N A T C TB NB、O两点的连线。
见图(d).第二章 力系的简化与平衡思考题:1. √;2. ×;3. ×;4. ×;5. √;6. ×;7. ×;8. ×;9. √.1. 平面力系由三个力和两个力偶组成,它们的大小和作用位置如图示,长度单位为cm ,求此力系向O 点简化的结果,并确定其合力位置。