2016Microchip培训资料-采用MCROCHIP电源管理和混合信号解决方案设计嵌入式系统 -- 1602
培训教材(初级版)

黄石市科威自控有限公司——EC/EP系列嵌入式PLC培训教材(初级版)序言电控技术日异月新,市场需求日益苛刻。
作为一家“以复兴民族自动化工业为已任”的科技型公司,只是学习、消化、汲取、实践别人的产品和技术是远远不够的,一定有自己独创的产品,才能在没有硝烟的战场上取获成功。
在董事长龚云生同志的得力领导下,公司公司骨干一直朝着“创新是一个民族的灵魂,是国家兴盛发达的不停动力”的方向奋进。
十余年来,战胜了重重困难,坚韧不拔地走自己的路。
发场团队精神,仔细累积和总结经验;自主创新与借“脑袋”并举。
天道酬勤,科威公司的科技成就不停浮现,特别是2005年,EC/EP系列嵌入式PLC在黄石市科威自控有限公司研发成功了!为我国的自动化工业增加了光彩。
自嵌入式PLC的成就在网上公布后,感兴趣的同仁日新月异,渴求认识其技术性能。
正由于嵌入式PLC刚才问世,知者甚少,为此,科威公司决定创办嵌入式PLC培训班。
这是切合“科学发展观”的要求的。
培训班的教材内容,由表及里,由浅入深。
因受时间和要求所限,不系统,重视实践。
希望对初学者,有所补益。
卫工08 年5月一、嵌入式PLC简介1、开发背景工控系统有大系统和小系统,特别是小系统,范围广,几乎覆盖了全部行业,并且要求是千差万其余。
控制器件有DCS、IPC和PLC等。
广大工控设计人员在器件选型时十分疑惑。
在数据办理上要求像IPC,在靠谱性上要求达到或超出PLC,在价位上力求便宜,好像单片机;在二次开发(应用程序)方面要求语言普通化、易学易懂易掌握。
谁都梦想有一款新式的工控产品能代替、包括IPC、PLC和单片机。
经过艰辛的努力,嵌入式PLC在科威公司问世了。
嵌入式PLC已列入国家科技攻关计划项目的阶段成就。
项目代号为2005BA206C。
2、什么是嵌入式PLC?嵌入式PLC是将通用的PLC梯形图语言、CANbus现场总线协议嵌入到单片机中,使其更具个性化、差别化,应用更宽泛、更灵巧,对用户更方便。
microchip数字电源方案

microchip数字电源方案数字电源方案(Microchip)摘要:本文介绍了Microchip的数字电源方案,包括其基本原理、设计特点以及应用优势。
通过对Microchip数字电源方案的深入了解,读者可以更好地理解并应用该方案。
第一节:引言数字电源方案是现代电子设备中不可或缺的组成部分,其作用包括对电流、电压等进行准确控制,并满足各种设备对电能的需求。
Microchip的数字电源方案基于先进的技术和创新的设计,为用户提供了高度可靠和灵活的电源解决方案。
第二节:基本原理Microchip的数字电源方案基于数字信号处理和控制技术,利用数字控制芯片对电源进行精准的调节和监测。
它通过采集电源输入和输出的相关参数,如电流、电压等,以数字信号的形式进行处理和传输。
通过对电源的高效控制和管理,数字电源方案能够提供更加稳定和可靠的电源输出。
第三节:设计特点1. 高度集成化:Microchip的数字电源方案集成了多种功率器件和控制电路,通过高度集成化的设计,能够在较小的尺寸下提供较高的功率输出。
2. 高精度控制:数字电源方案采用先进的控制算法和实时反馈机制,能够实现对电源电压和电流的高精度控制,以满足各种应用对电源的稳定性要求。
3. 强大的保护功能:数字电源方案具备多种保护功能,包括过压保护、过流保护、短路保护等,可以有效地保护设备和电源免受异常工作状态的影响。
4. 可编程性:通过软件编程,用户可以对数字电源方案进行灵活的配置和调节,以适应不同的应用需求。
同时,数字电源方案支持实时监测和远程控制,方便用户对电源状态进行实时监管和管理。
第四节:应用优势1. 工业自动化:数字电源方案在工业自动化领域具有广泛的应用,可以用于运动控制、机器人技术、工艺控制等各种场景,实现对设备的高效供电和精准控制。
2. 通信设备:在通信设备中,数字电源方案能够提供稳定和可靠的电源输出,保证设备的正常运行。
同时,数字电源方案支持高效能耗管理,通过智能控制降低设备的功耗,延长设备的使用寿命。
微芯片技术(Microchip Technology)无传感器场向控制(FOC)技术指南说明书
Microchip Technology Inc.User GuideSensor less Field Oriented Control with SAM E54Contents1. Introduction (2)1.1. SAME54 Microcontroller Card for ATBLDC24V Motor Control Starter Kit (2)1.2. ATBLDC24V-STK Features (3)1.3. Microchip ATSAME54 MOTOR MCU Board (4)1.3.1. MCU Card (4)1.3.2. Power Supply (4)1.3.3. Embedded Debugger (4)1.3.4. 67-pin MCU-DRIVER Board Interface (5)1.4. Motor Specification (6)2. Software Requirement (7)3. Getting Started with ATBLDC24V-STK (7)4. Firmware User Configuration (11)5. Software Implementation (12)6. References (14)7. Revision History (14)1.Introduction1.1.S AME54 Microcontroller Card for ATBLDC24V Motor Control Starter KitThe ATSAME54MOTOR is a MCU card for Atmel® Motor control low voltage starter kits. The hardware has the ARM® M4 core -based SAME54 MCU, with integrated on-board debug support. The MCU card can be directly used with the currently available ATSAMD21BLDC24V-STK®, a low voltage BLDC, PMSM motor control starter kit. The kit contains a driver board hardware with half-bridge power MOSFET drivers, current and voltage sensing circuit, Hall, and Encoder interface, fault protection circuits, etc. Supported by the Atmel studio integrated development platform, the kit provides easy access to the features of SAME54 MCU and explains how to integrate the device in a custom motor control application.Figure 1 Atmel low voltage motor control kit1.2.A TBLDC24V-STK FeaturesATBLDC24V-STK has the following features:• Pluggable MCU card interface• Debug support using on-board Atmel EDBG device• Three half-bridge MOSFET driver• Motor BEMF sensing• Motor individual phase current sensing• DC-bus voltage sensing• Hall sensor interface• Encoder s ensor interface• Over-current protection support• Over-voltage protection at 30VDC• 5V and 3.3V MCU card support• Selectable MCU supply voltage• Reverse power supply voltage protection• Atmel Xplained Pro compatible header interface• On board Temperature sensor• On board serial flash• LED fault indications• Atmel studio plug-and-use support using unique ID device1.3.M icrochip ATSAME54 MOTOR MCU Board1.3.1.MCU CardSAM E54 is a high-performance Flash microcontroller (MCU) based on the 32-bit ARM® Cortex®-M4 RISC (403 CoreMark at 120MHz) processor with floating point unit (FPU). The device operates at a maximum speed of 120 MHz, features up to 1024 Kbytes of Flash, up to 4 Kbytes of TCM (Tightly Coupled Memory)and up to 256 Kbytes of SRAM.The device is intended to work with external 12MHz oscillator. An external reset switch is connected to the MCU RESET pin.Figure 2 ATSAME54 MCU Card1.3.2.Power SupplyThe ATSAME54 MOTOR MCU card takes 3.3VDC supply from the 67-pin edge connector. Both the EDBG device and the Main MCU operate from 3.3VDC. The power supply selection jumper on the Driver board should be connected to 3V3 selection..1.3.3.Embedded DebuggerThe ATSAME54 MCU is interfaced to the EDBG debug device. The EDBG uses SWD interface for programming and debugging the main MCU. A debug header is also provided on the MCU board with ARM Cortex® debug pin out. An external debugger can be connected to this debug port.The DGI is a proprietary communication interface used by the Atmel Data Visualizer software to communicate with the development kits through the EDBG. ATSAME54 connected to the EDBG device, with DGI SPI interface and uses the Atmel ADP protocol.High Speed USB port of the EDBG is accessible at the driver board. EDBG USB enumerates as a composite device supporting debug, DGI SPI, and CDC interfaces.The USB port of the EDBG is connected to the Micro-USB connecter on the driver board.1.3.4.67-pin MCU-DRIVER Board InterfaceATSAME54 MCU card is connected to driver board through 67-pin interface as shown below.Figure 3 67 Pin MCU-Driver Board Interface1.4.M otor Specification2.Software RequirementTo run this demo below mentioned software should be installed on the PC.3.Getting Started with ATBLDC24V-STKThis chapter is a step-by-step guide to get started with the ATSAME54 for ATBLDC24V-STK.1.ATBLDC24V-STK kit contains a fully assembled chassis and 24VDC power adaptor.2.Make sure switch SW1 on driver board (ATBLDC24V) is set to USB/X5V.3.Make sure jumper (J26) on driver board (ATBLDC24V) is set to 3.3V.4.Connect the power adaptor to the “SUPPLY-IN connector”. Connect white color cable to + PIN.Figure 4 Kit with Power and USB Ports Connected5.Connect the Micro-USB cable to the “EDBG-USB connector” and PC USB port.6.Switch ON the power adaptor.7.The power LED indications on the MCU card are now ON.8. If MCU is pre-programmed then directly open "Data Visualizer". If it’s not, then program itthrough Atmel studio and run the program first and then open the data visualizer9.In the "Data Visualizer Connect Window" select the kit from the DGI control panel's drop downlist.Figure 5 Data Visualizer Connect Window10.Click "Connect".11.The Data Visualizer default window will pop up once the connection is made. All the fields shallshow default values as shown below.Figure 6 Data Visualizer Start Window12.Click on "START/STOP" button to turn the motor ON with default values.Figure 7 Data Visualizer Motor Start Window13.One can adjust the graph by selecting checkbox "Automatically fit Y" for better visualization.14.To change the parameter, enter the value in a input field and press "Enter". For example, tochange the motor speed, type in the desired speed within the Reference Speed (RPM) input box and press "Enter".Figure 8 Data Visualizer Change Parameter Online15.To stop the motor, click on the “Stop" button. It will ramp down and stop the motor.Figure 9 Data visualizer Stop motor window4.Firmware User ConfigurationAlgorithm can be fine-tuned for any motor by updating motor parameters in “userparams.h” file. Following are the configurations available for the user to modify the motor and algorithm parameters.5.Software ImplementationPWM event generation unit is configured to trigger AFEC module to start adc conversion. Once the trigger is received by AFEC module, two configured phase current measurements are simultaneously sampled and conversion takes place. Phase current result ready event will generate interrupt. Then DC bus voltage is measured inside interrupt. In addition, speed POT is measured if it is enabled.The FOC algorithm is executed inside ADC end of conversion interrupt handler. This interrupt is dedicated for fast controlling and it’s in sync with PWM. If any fast controlling tasks need to be added then this is the place. Apart from this, slow control loop is also available and its frequency can be configured by “SLOW_LOOP_TIME_SEC” in user configurations. Slow loop execution frequency should be in multiple of PWM frequency. Speed ramp and speed PI control loop is executed from slow control loop. If any additional tasks one has to execute at slower rate, then “SlowControlLoop()” function is a place holder.ADCEOCInterruptHandlerRead 2 phase currents Software trigger for DC bus and POTmeasurementClarke Transform Convert balanced three-phase quantities to balanced two-phase quadrature quantitiesPark TransformTwo-phase orthogonal stationary system to orthogonal rotating reference framePLL EstimatorBEMF based PLL observer to Estimate Motor Position and SpeedPI ControllersId(Flux), Iq (Torque) PI controllersInverse Park Transform Rotating reference frame to Orthogonal stationary reference frame Inverse Clarke Transform2 axis orthogonal frame to3 phase stationary frameSVPWMSpace vector modulation to update PWM duty cycleSTOP SlowControlLoopSpeedRamp()PI ControlSpeed PI controlSTOPFigure 10 Control loop flow chart6.ReferencesApp Note - /downloads/en/AppNotes/00002520B.pdfAtmel Studio 7 - /microsite/atmel-studio/Data Visualizer - https:///Products/Details/0b2891f4-167a-49fc-b3f0-b882c7a11f98 7.Revision History。
2016Microchip培训资料-LAN,USB集线,TYPE-C--1606

1606
5
以太网技术差异
高能效
• • • •
确定性
•
可靠性
• • •
超低功耗以太网PHY EtherGreen™高级电源管理 超级深度休眠 uA级待机电流 高度集成,精简BOM,小外形封 装
EtherSynch® IEEE 1588v2 / 802.1AS同步 固定/低延时传输 AVB/时间意识流量调度
MII/RGMII/GMII 有 有 X cntlr 有
1.8/2.5/3.3 1.8/2.5/3.3 1.8/2.5/3.3 有+
信号质量指标
X
X
总计 170mW
+ uA级待机电 流
总计 155mW
总计 155mW
总计 256mW
总计 249mW
总计 269mW
总计 286mW
总计 286mW
总计 488mW
GIGE
10/100/1000
KSZ9031 10/100/1000 GMII/RGMII
LAN7500 USB2.0到 10/100/1000
KSZ87xx 带GigE上行链路 的5端口开关 LAN9252 100 2/3端口 EtherCAT 控制器和开关 LAN9250 控制器
KSZ806 1 10/100(Vmode) Quiet-WIRE
支持所有标准以太网诊断/监视方法
链路接通/断开中断、LED状态和MIB计数器 检测开路、短路和故障点
现有方法只能在发生故障后 识别/定位故障
Micrel LinkMD®线缆故障诊断
新的LinkMD®+信号质量指标(SQI)
采用4位值来确定接收信号裕度/错误概率
微芯片技术(Microchip Technology)PI控制器v4.2用户指南说明书

PI Controller v4.2 User GuideIntroduction (Ask a Question)Proportional Integral (PI) Controller is the widely used closed-loop controller for controlling a first order system. The basic functionality of a PI Controller is to make the feedback measurement track the reference input, which is done by controlling its output till the error between reference and feedback signals becomes zero.Summary (Ask a Question)Features (Ask a Question)PI Controller has the following key features:•Automatic anti-windup and initialization functions are includedImplementation of IP Core in Libero Design Suite (Ask a Question)IP core must be installed to the IP Catalog of the Libero® System-on-Chip (SoC) software. This is done automatically through the IP Catalog update function in the Libero SoC software, or the IP core can be manually downloadedfrom the catalog. Once the IP core is installed in the Libero SoC software IP Catalog, the core can be configured, generated, and instantiated within the SmartDesign tool for inclusion in the Libero project list.Device Utilization and Performance (Ask a Question)The following table lists the device utilization used for PI Controller.Table 1. PI Controller UtilizationImportant: 1.The data in this table is captured using typical synthesis and layout settings. CDR reference clocksource was set to Dedicated with other configurator values unchanged.2.Clock is constrained to 200 MHz while running the timing analysis to achieve the performancenumbers.Table of ContentsIntroduction (1)Summary (1)Features (1)Implementation of IP Core in Libero Design Suite (1)Device Utilization and Performance (1)1. Functional Description (4)1.1. Anti-Windup and Initialization (6)2. PI Controller Parameters and Interface Signals (7)2.1. Configuration of GUI Parameters (7)2.2. Input and Output Signals (7)3. Timing Diagrams (8)4. Testbench (9)4.1. Simulation (9)5. Revision History (12)Microchip FPGA Support (13)Microchip Information (13)The Microchip Website (13)Product Change Notification Service (13)Customer Support (13)Microchip Devices Code Protection Feature (13)Legal Notice (14)Trademarks (14)Quality Management System (15)Worldwide Sales and Service (16)1. Functional Description (Ask a Question)This section describes the implementation details of the PI Controller.The following figure shows the block diagram of PI Controller.Figure 1-1. System-Level Block Diagram of PI ControllerThe ref_input_i port connects to the reference input, while the act_input_i port connects to the actual input. Thekp_i and ki_i inputs represent the proportional and integral gains. ymax_i and ymin_i represent the minimum andmaximum outputs. The init_i input represents the initialization value (which is output if the PI Controller is disabled),and the pi_en_i input is used to enable the PI Controller operation. A pulse of one clock cycle width is used tostart the computation. The done_o output signal represents valid data on the output_y_o port. A single clock pulseappears at the done_o signal to represent the end of computation.The entire system is synchronized with the rising edge of clock and controlled by a finite state machine (FSM). The PI Controller block uses a multiply-accumulate-subtract (MAS) block to perform operations like multiplication, addition,and subtraction. There are two components that contribute to the output, the proportional term and the integral term as shown in the following figure. The proportional term is only dependent on the instantaneous value of the errorsignal whereas the integral term is dependent on the present and previous values of error.Figure 1-2. PI Controller in Continuous DomainPI Controller in continuous time domain can be expressed as:where,e(t) = reference(t) - feedback(t) is the error between Reference and feedbacky(t) = PI Controller outputTo implement the PI Controller in digital domain, it has to be discretized. The discretized form of PI Controller based on zero-order hold method is shown in the following figure.Figure 1-3. The Discretized Form of PI ControllerFigure 1-4. Equationwhere,P(n) = Proportional term outputI(n) = Integral term outputI(n-1) = Previous (buffered) value of Integral outputTs = Sampling time in discrete domain1.1 Anti-Windup and Initialization (Ask a Question)The PI Controller has maximum and minimum limits for its output so as to keep it within practical values. If a non-zero error signal persists for a long time, the Integral component of the controller keeps increasing and may reach avalue limited by its bit width. This phenomenon is called integrator windup and has to be avoided to have properdynamic response. The PI Controller IP has an automatic anti-windup function which limits integrator as soon as the PI Controller reaches saturation.In certain applications like motor control, it is important to initialize the PI Controller to a proper value before enabling it. Initializing the PI to a good value avoids jerky operation. The IP block has an enable input to enable or disable the PI Controller. When disabled, the output will be equal to the init input and when enabled, the output is PI computedvalue.PI Controller Parameters and Interface Signals 2. PI Controller Parameters and Interface Signals (Ask a Question)This section discusses the parameters in the PI Controller GUI configurator and I/O signals.2.1 Configuration of GUI Parameters (Ask a Question)The following table lists the description of the configuration parameters used in the hardware implementation of PIController. These are generic parameters that are customizable as per the requirement of the application.Table 2-1. Configuration Parameters2.2 Input and Output Signals (Ask a Question)The following table lists the input and output ports of PI Controller.Table 2-2. Inputs and Outputs of PI ControllerTiming Diagrams 3. Timing Diagrams (Ask a Question)This section discusses the PI Controller timing diagram.The following figure shows the timing diagram of PI Controller.Figure 3-1. PI Controller Timing Diagramsys_clk_istart_ikp_iki_iref_input_iact_input_iDone_ooutput_y_o4. Testbench (Ask a Question)A unified testbench is used to verify and test PI Controller called as user testbench. Testbench is provided to checkthe functionality of the PI Controller IP.4.1 Simulation (Ask a Question)The following steps describe how to simulate the core using the testbench:1.Open the Libero SoC application, click Catalog tab, expand Solutions-MotorControl, double click PIController, and then click OK. The documentation associated with the IP are listed under Documentation.Important: If you do not see the Catalog tab, navigate to View > Windows menu and clickCatalog to make it visible.Figure 4-1. PI Controller IP Core in Libero SoC Catalog2.On the Stimulus Hierarchy tab, select the testbench (pi_controller_tb.v), right click and then clickSimulate Pre-Synth Design > Open Interactively.Important: If you do not see the Stimulus Hierarchy tab, navigate to View > Windows menu andclick Stimulus Hierarchy to make it visible.Figure 4-2. Simulating Pre-Synthesis DesignModelSim opens with the testbench file, as shown in the following figure.Testbench Figure 4-3. ModelSim Simulation WindowImportant: If the simulation is interrupted due to the runtime limit specified in the .do file, use the run -all command to complete the simulation.Revision History 5. Revision History (Ask a Question)The revision history describes the changes that were implemented in the document. The changes are listed byrevision, starting with the most current publication.Table 5-1. Revision HistoryMicrochip FPGA Support (Ask a Question)Microchip FPGA products group backs its products with various support services, including Customer Service, Customer Technical Support Center, a website, and worldwide sales offices. Customers are suggested to visit Microchip online resources prior to contacting support as it is very likely that their queries have been already answered.Contact Technical Support Center through the website at /support. Mention the FPGA Device Part number, select appropriate case category, and upload design files while creating a technical support case.Contact Customer Service for non-technical product support, such as product pricing, product upgrades, update information, order status, and authorization.•From North America, call 800.262.1060•From the rest of the world, call 650.318.4460•Fax, from anywhere in the world, 650.318.8044Microchip Information (Ask a Question)The Microchip Website (Ask a Question)Microchip provides online support via our website at /. This website is used to make files and information easily available to customers. Some of the content available includes:•Product Support – Data sheets and errata, application notes and sample programs, design resources, user’s guides and hardware support documents, latest software releases and archived software•General Technical Support – Frequently Asked Questions (FAQs), technical support requests, online discussion groups, Microchip design partner program member listing•Business of Microchip – Product selector and ordering guides, latest Microchip press releases, listing of seminars and events, listings of Microchip sales offices, distributors and factory representativesProduct Change Notification Service (Ask a Question)Microchip’s product change notification service helps keep customers current on Microchip products. Subscribers will receive email notification whenever there are changes, updates, revisions or errata related to a specified product family or development tool of interest.To register, go to /pcn and follow the registration instructions.Customer Support (Ask a Question)Users of Microchip products can receive assistance through several channels:•Distributor or Representative•Local Sales Office•Embedded Solutions Engineer (ESE)•Technical SupportCustomers should contact their distributor, representative or ESE for support. Local sales offices are also available to help customers. A listing of sales offices and locations is included in this document.Technical support is available through the website at: /supportMicrochip Devices Code Protection Feature (Ask a Question)Note the following details of the code protection feature on Microchip products:•Microchip products meet the specifications contained in their particular Microchip Data Sheet.•Microchip believes that its family of products is secure when used in the intended manner, within operating specifications, and under normal conditions.•Microchip values and aggressively protects its intellectual property rights. Attempts to breach the code protection features of Microchip product is strictly prohibited and may violate the Digital Millennium Copyright Act.•Neither Microchip nor any other semiconductor manufacturer can guarantee the security of its code. Code protection does not mean that we are guaranteeing the product is “unbreakable”. Code protection is constantly evolving. Microchip is committed to continuously improving the code protection features of our products. Legal Notice (Ask a Question)This publication and the information herein may be used only with Microchip products, including to design, test,and integrate Microchip products with your application. Use of this information in any other manner violates these terms. Information regarding device applications is provided only for your convenience and may be supersededby updates. It is your responsibility to ensure that your application meets with your specifications. Contact yourlocal Microchip sales office for additional support or, obtain additional support at /en-us/support/ design-help/client-support-services.THIS INFORMATION IS PROVIDED BY MICROCHIP "AS IS". MICROCHIP MAKES NO REPRESENTATIONSOR WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED, WRITTEN OR ORAL, STATUTORYOR OTHERWISE, RELATED TO THE INFORMATION INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTIES OF NON-INFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE, OR WARRANTIES RELATED TO ITS CONDITION, QUALITY, OR PERFORMANCE.IN NO EVENT WILL MICROCHIP BE LIABLE FOR ANY INDIRECT, SPECIAL, PUNITIVE, INCIDENTAL, OR CONSEQUENTIAL LOSS, DAMAGE, COST, OR EXPENSE OF ANY KIND WHATSOEVER RELATED TO THE INFORMATION OR ITS USE, HOWEVER CAUSED, EVEN IF MICROCHIP HAS BEEN ADVISED OF THE POSSIBILITY OR THE DAMAGES ARE FORESEEABLE. TO THE FULLEST EXTENT ALLOWED BY LAW, MICROCHIP'S TOTAL LIABILITY ON ALL CLAIMS IN ANY WAY RELATED TO THE INFORMATION OR ITS USE WILL NOT EXCEED THE AMOUNT OF FEES, IF ANY, THAT YOU HAVE PAID DIRECTLY TO MICROCHIP FOR THE INFORMATION.Use of Microchip devices in life support and/or safety applications is entirely at the buyer's risk, and the buyer agrees to defend, indemnify and hold harmless Microchip from any and all damages, claims, suits, or expenses resulting from such use. No licenses are conveyed, implicitly or otherwise, under any Microchip intellectual property rights unless otherwise stated.Trademarks (Ask a Question)The Microchip name and logo, the Microchip logo, Adaptec, AVR, AVR logo, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, Microsemi logo, MOST, MOST logo, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, SST Logo, SuperFlash, Symmetricom, SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron, and XMEGA are registered trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, ProASIC Plus logo, Quiet- Wire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime, and ZL are registered trademarks of Microchip Technology Incorporated in the U.S.A.Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, , Dynamic Average Matching, DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, In-Circuit Serial Programming, ICSP, INICnet, Intelligent Paralleling, IntelliMOS, Inter-Chip Connectivity, JitterBlocker, Knob-on-Display, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, , PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, RTAX, RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-I.S., storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect, and ZENA are trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.The Adaptec logo, Frequency on Demand, Silicon Storage Technology, and Symmcom are registered trademarks of Microchip Technology Inc. in other countries.GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of Microchip Technology Inc., in other countries.All other trademarks mentioned herein are property of their respective companies.© 2023, Microchip Technology Incorporated and its subsidiaries. All Rights Reserved.ISBN: 978-1-6683-2116-4Quality Management System (Ask a Question)For information regarding Microchip’s Quality Management Systems, please visit /quality.Worldwide Sales and Service。
Microchip CoreFIR_PF v3.0 多项式滤波器核心数据手册说明书
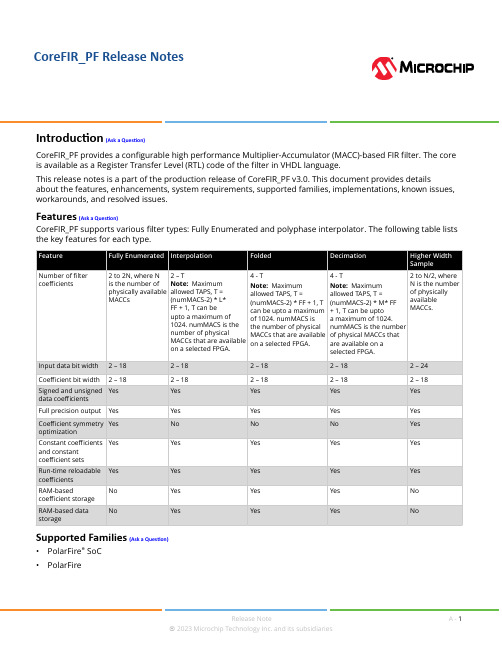
CoreFIR_PF Release NotesCoreFIR_PF provides a configurable high performance Multiplier-Accumulator (MACC)-based FIR filter. The core is available as a Register Transfer Level (RTL) code of the filter in VHDL language.This release notes is a part of the production release of CoreFIR_PF v3.0. This document provides details about the features, enhancements, system requirements, supported families, implementations, known issues, workarounds, and resolved issues.Features (Ask a Question)CoreFIR_PF supports various filter types: Fully Enumerated and polyphase interpolator. The following table liststhe key features for each type.Supported Families (Ask a Question)•PolarFire® SoC•PolarFireTable of ContentsIntroduction (1)Features (1)Supported Families (1)1. Overview (3)1.1. Licensing (3)1.2. Supported Tool Flows (3)1.3. Installation Instructions (3)1.4. Supported Test Environments (3)2. Discontinued Features and Devices (4)3. Known Limitations and Workarounds (5)4. Resolved Issues (6)4.1. Resolved Issues in the CoreFIR_PF v3.0 Release (6)4.2. Resolved Issues in the CoreFIR_PF v2.3 Release (6)4.3. Resolved Issues in the CoreFIR_PF v2.2 Release (6)4.4. Resolved Issues in the CoreFIR_PF v2.1 Release (6)4.5. Resolved Issues in the CoreFIR_PF v2.0 Release (6)5. Revision History (7)Microchip FPGA Support (8)Microchip Information (8)The Microchip Website (8)Product Change Notification Service (8)Customer Support (8)Microchip Devices Code Protection Feature (8)Legal Notice (9)Trademarks (9)Quality Management System (10)Worldwide Sales and Service (11)Overview 1. Overview (Ask a Question)This release contains a copy of the CoreFIR_PF user guide. The user guide, describes the IP corefunctionalities and provides step-by-step instructions on how to simulate, synthesize, and place-and-route this IP core, and also provides implementation suggestions.For updates and additional information about the software, devices, and hardware, visit theIntellectual Property pages on the Microchip FPGA Products Group website.1.1 Licensing (Ask a Question)CoreFIR_PF is freely distributed with Microchip Libero SoC. Complete HDL source code is providedfor the core and testbenches.1.2 Supported Tool Flows (Ask a Question)CoreFIR_PF v3.0 requires Libero System-on-Chip (SoC) software v12.0 or later.1.3 Installation Instructions (Ask a Question)The IP core must be installed to the IP Catalog of Libero SoC software. This is done automaticallythrough the IP Catalog update function in Libero SoC software, or the IP core can be manuallydownloaded from the catalog. Once the IP core is installed in Libero SoC software IP Catalog, thecore can be configured, generated, and instantiated within SmartDesign for inclusion in the Liberoproject.1.4 Supported Test Environments (Ask a Question)The test environment supported for default configuration constant coefficient set, VHDL usertestbench.Discontinued Features and Devices 2. Discontinued Features and Devices (Ask a Question)CoreFIR_PF discontinued support for SmartFusion2 and IGLOO2 devices. These devices aresupported in CoreFIR v8.6.Known Limitations and Workarounds 3. Known Limitations and Workarounds (Ask a Question)None.4. Resolved Issues (Ask a Question)This topic describes the resolved issues for the various CoreFIR_PF core releases.4.1 Resolved Issues in the CoreFIR_PF v3.0 Release (Ask a Question)The following table lists all the resolved issues in the CoreFIR_PF v3.0 release.4.2 Resolved Issues in the CoreFIR_PF v2.3 Release (Ask a Question)There were no issues reported or resolved in the CoreFIR_PF v2.3 release. PolarFire SoC support was added.4.3 Resolved Issues in the CoreFIR_PF v2.2 Release (Ask a Question)The following table lists all the resolved issues in the CoreFIR_PF v2.2 release.4.4 Resolved Issues in the CoreFIR_PF v2.1 Release (Ask a Question)The following table lists all the resolved issues in the CoreFIR_PF v2.1 release.4.5 Resolved Issues in the CoreFIR_PF v2.0 Release (Ask a Question)The following table lists all the resolved issues in the CoreFIR_PF v2.0 release.5. Revision History (Ask a Question)The revision history describes the changes that were implemented in the document. The changes are listed by revision, starting with the most current publication.Microchip FPGA products group backs its products with various support services, including Customer Service, Customer Technical Support Center, a website, and worldwide sales offices. Customers are suggested to visit Microchip online resources prior to contacting support as it is very likely that their queries have been already answered.Contact Technical Support Center through the website at /support. Mention the FPGA Device Part number, select appropriate case category, and upload design files while creating a technical support case.Contact Customer Service for non-technical product support, such as product pricing, product upgrades, update information, order status, and authorization.•From North America, call 800.262.1060•From the rest of the world, call 650.318.4460•Fax, from anywhere in the world, 650.318.8044The Microchip Website (Ask a Question)Microchip provides online support via our website at /. This website is used to make files and information easily available to customers. Some of the content available includes:•Product Support – Data sheets and errata, application notes and sample programs, design resources, user’s guides and hardware support documents, latest software releases and archived software•General Technical Support – Frequently Asked Questions (FAQs), technical support requests, online discussion groups, Microchip design partner program member listing•Business of Microchip – Product selector and ordering guides, latest Microchip press releases, listing of seminars and events, listings of Microchip sales offices, distributors and factoryrepresentativesProduct Change Notification Service (Ask a Question)Microchip’s product change notification service helps keep customers current on Microchip products. Subscribers will receive email notification whenever there are changes, updates, revisions or errata related to a specified product family or development tool of interest.To register, go to /pcn and follow the registration instructions.Customer Support (Ask a Question)Users of Microchip products can receive assistance through several channels:•Distributor or Representative•Local Sales Office•Embedded Solutions Engineer (ESE)•Technical SupportCustomers should contact their distributor, representative or ESE for support. Local sales offices are also available to help customers. A listing of sales offices and locations is included in this document. Technical support is available through the website at: /support Microchip Devices Code Protection Feature (Ask a Question)Note the following details of the code protection feature on Microchip products:•Microchip products meet the specifications contained in their particular Microchip Data Sheet.•Microchip believes that its family of products is secure when used in the intended manner, within operating specifications, and under normal conditions.•Microchip values and aggressively protects its intellectual property rights. Attempts to breach the code protection features of Microchip product is strictly prohibited and may violate the Digital Millennium Copyright Act.•Neither Microchip nor any other semiconductor manufacturer can guarantee the security of its code. Code protection does not mean that we are guaranteeing the product is “unbreakable”.Code protection is constantly evolving. Microchip is committed to continuously improving the code protection features of our products.Legal Notice (Ask a Question)This publication and the information herein may be used only with Microchip products, includingto design, test, and integrate Microchip products with your application. Use of this informationin any other manner violates these terms. Information regarding device applications is provided only for your convenience and may be superseded by updates. It is your responsibility to ensure that your application meets with your specifications. Contact your local Microchip sales office for additional support or, obtain additional support at /en-us/support/design-help/ client-support-services.THIS INFORMATION IS PROVIDED BY MICROCHIP "AS IS". MICROCHIP MAKES NO REPRESENTATIONS OR WARRANTIES OF ANY KIND WHETHER EXPRESS OR IMPLIED, WRITTEN OR ORAL, STATUTORY OR OTHERWISE, RELATED TO THE INFORMATION INCLUDING BUT NOT LIMITED TO ANY IMPLIED WARRANTIES OF NON-INFRINGEMENT, MERCHANTABILITY, AND FITNESS FOR A PARTICULAR PURPOSE, OR WARRANTIES RELATED TO ITS CONDITION, QUALITY, OR PERFORMANCE.IN NO EVENT WILL MICROCHIP BE LIABLE FOR ANY INDIRECT, SPECIAL, PUNITIVE, INCIDENTAL, OR CONSEQUENTIAL LOSS, DAMAGE, COST, OR EXPENSE OF ANY KIND WHATSOEVER RELATED TO THE INFORMATION OR ITS USE, HOWEVER CAUSED, EVEN IF MICROCHIP HAS BEEN ADVISED OF THE POSSIBILITY OR THE DAMAGES ARE FORESEEABLE. TO THE FULLEST EXTENT ALLOWED BY LAW, MICROCHIP'S TOTAL LIABILITY ON ALL CLAIMS IN ANY WAY RELATED TO THE INFORMATION ORITS USE WILL NOT EXCEED THE AMOUNT OF FEES, IF ANY, THAT YOU HAVE PAID DIRECTLY TO MICROCHIP FOR THE INFORMATION.Use of Microchip devices in life support and/or safety applications is entirely at the buyer's risk, and the buyer agrees to defend, indemnify and hold harmless Microchip from any and all damages, claims, suits, or expenses resulting from such use. No licenses are conveyed, implicitly or otherwise, under any Microchip intellectual property rights unless otherwise stated.Trademarks (Ask a Question)The Microchip name and logo, the Microchip logo, Adaptec, AVR, AVR logo, AVR Freaks, BesTime, BitCloud, CryptoMemory, CryptoRF, dsPIC, flexPWR, HELDO, IGLOO, JukeBlox, KeeLoq, Kleer, LANCheck, LinkMD, maXStylus, maXTouch, MediaLB, megaAVR, Microsemi, Microsemi logo, MOST, MOST logo, MPLAB, OptoLyzer, PIC, picoPower, PICSTART, PIC32 logo, PolarFire, Prochip Designer, QTouch, SAM-BA, SenGenuity, SpyNIC, SST, SST Logo, SuperFlash, Symmetricom, SyncServer, Tachyon, TimeSource, tinyAVR, UNI/O, Vectron, and XMEGA are registered trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.AgileSwitch, APT, ClockWorks, The Embedded Control Solutions Company, EtherSynch, Flashtec, Hyper Speed Control, HyperLight Load, Libero, motorBench, mTouch, Powermite 3, Precision Edge, ProASIC, ProASIC Plus, ProASIC Plus logo, Quiet- Wire, SmartFusion, SyncWorld, Temux, TimeCesium, TimeHub, TimePictra, TimeProvider, TrueTime, and ZL are registered trademarks of Microchip Technology Incorporated in the U.S.A.Adjacent Key Suppression, AKS, Analog-for-the-Digital Age, Any Capacitor, AnyIn, AnyOut, Augmented Switching, BlueSky, BodyCom, Clockstudio, CodeGuard, CryptoAuthentication, CryptoAutomotive, CryptoCompanion, CryptoController, dsPICDEM, , DynamicAverage Matching, DAM, ECAN, Espresso T1S, EtherGREEN, GridTime, IdealBridge, In-Circuit Serial Programming, ICSP, INICnet, Intelligent Paralleling, IntelliMOS, Inter-Chip Connectivity, JitterBlocker, Knob-on-Display, KoD, maxCrypto, maxView, memBrain, Mindi, MiWi, MPASM, MPF, MPLAB Certified logo, MPLIB, MPLINK, MultiTRAK, NetDetach, Omniscient Code Generation, PICDEM, , PICkit, PICtail, PowerSmart, PureSilicon, QMatrix, REAL ICE, Ripple Blocker, RTAX, RTG4, SAM-ICE, Serial Quad I/O, simpleMAP, SimpliPHY, SmartBuffer, SmartHLS, SMART-I.S., storClad, SQI, SuperSwitcher, SuperSwitcher II, Switchtec, SynchroPHY, Total Endurance, Trusted Time, TSHARC, USBCheck, VariSense, VectorBlox, VeriPHY, ViewSpan, WiperLock, XpressConnect, and ZENA are trademarks of Microchip Technology Incorporated in the U.S.A. and other countries.SQTP is a service mark of Microchip Technology Incorporated in the U.S.A.The Adaptec logo, Frequency on Demand, Silicon Storage Technology, and Symmcom are registered trademarks of Microchip Technology Inc. in other countries.GestIC is a registered trademark of Microchip Technology Germany II GmbH & Co. KG, a subsidiary of Microchip Technology Inc., in other countries.All other trademarks mentioned herein are property of their respective companies.© 2023, Microchip Technology Incorporated and its subsidiaries. All Rights Reserved.ISBN:Quality Management System (Ask a Question)For information regarding Microchip’s Quality Management Systems, please visit/quality.Worldwide Sales and ServiceRelease Note© 2023 Microchip Technology Inc. and its subsidiaries A - 11。
microchip数字电源方案

microchip数字电源方案数字电源方案是指利用数字技术控制和管理电源供应的系统。
它使用集成电路和控制算法来实现高效、可靠的电源管理,具有快速响应、精确控制和低功耗的特点。
Microchip是全球领先的半导体技术公司,为各种应用领域提供创新的数字电源解决方案。
一、微控制器和DSPMicrochip的数字电源方案主要基于微控制器和数字信号处理器(DSP)技术。
微控制器是一种集成了处理器核心、存储器、输入输出接口和定时器等功能的单芯片系统,适用于各种电源管理应用。
DSP 则特别适用于高性能的数字信号处理和控制应用,可以实现复杂的算法和实时控制。
二、数字功率控制Microchip的数字电源方案包括了数字功率控制技术。
通过使用先进的数字控制算法,可以实现对功率变换器的精确控制。
这种技术可以实现功率因数校正、电压和电流调节等功能,提高电源效率并降低能源消耗。
三、数字电源管理Microchip的数字电源方案还包括了数字电源管理功能。
这些功能包括电源监测、故障保护和故障诊断等功能,可以提高电源系统的可靠性和稳定性。
通过数字电源管理,可以实现远程监控和控制,提高系统的可维护性。
四、数字电源设计工具为了帮助开发人员设计和优化数字电源方案,Microchip提供了丰富的数字电源设计工具。
这些工具包括仿真软件、开发板和参考设计等,可以帮助开发人员快速搭建并验证数字电源系统的性能。
五、应用领域Microchip的数字电源方案适用于各种应用领域。
例如,工业自动化中的电源管理、通信设备中的高效电源供应、电动汽车中的电池管理等。
数字电源方案可以提高系统的能效,减少能源消耗,并提高系统的稳定性和可靠性。
结论Microchip的数字电源方案是一种先进的电源管理解决方案,利用最新的数字技术和算法来实现高效、可靠的电源供应。
它能够提高电源系统的效率和稳定性,并减少能源消耗。
通过使用Microchip的数字电源方案,开发人员可以快速设计和实现各种应用领域的数字电源系统。
中文MicroTech演示文稿

文弹件出,“点Pr击ocOeepdenwith Partition restore?”警告
弹窗出口S,el选ec择t sYoeusrce Partition from Image file窗口,
选等择待存gh有ostw进in程2k完80成3.,gh重o的启源电盘脑,。点击OK
设置步骤
设置BIOS密码 设置服务账户和客户账户 账户访问控制 pLAN程序自动运行 user账户自动登录 设置完成,重新启动系统。
触摸式操作屏(OITS)
一个输入装 置,无控制 功能,主要 用于显示每 台冷水机组 的信息和主 要参数设定。
机组控制器
用于每台冷水机 组的功能控制和 与所有其它控制 器通讯。当OITS 不工作它仍可进 行参数设定值输 入工作。它被安 装在与OITS相毗 的控制柜内。
压缩机控制器
用于每台压缩机控制,它在没有机组控制器 或操作界面时仍可运行。
限
点 击
允许栏 仅勾中 “读取及 运行 ” “列出 文件夹 目录” “读取” 三项
在列表 框中将 admin添 加进去
设置BIOS密码
开启操作屏,启动系统 按住DEL键进入BIOS设置界面Award BIOS CMOS
Setup Utility 用键盘将光标移动至Set Password项 按回车键设置密码****,输入两次 将光标移动至Save&Exit Setup项,按回车键 弹出窗口Save to CMOS and EXIT(Y/N)? 输入Y退出。
中文版本:机组的J11与压缩机的J11直 接相连;机组的J10连接到UCM的RJ45 pLAN 接 口 , UCM 通 过 RS232 通 讯 电 缆 连接到中文屏的COM1。
W33.0342101
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
“模拟”控制
22
什么是数字增强型 电源模拟产品?
数字控制 模拟控制 电源转换解决方案空间
技术 技术
PWM发生器 外设
MOSFET 驱动器
PWM 比较器 误差 放大 器 VREF
MOSFET 驱动器 VFB
控制器—MCU (系数和 工作设定值)
A/D 转换器
VFB
补偿器 控制器
比较器
“数字”控制
532
1995 1996 1997 1998 1999 2000 2001 2002 2003 2004 2005 2006 2007 2008 2009 2010 2011 2012 2013 2014 2015
4
模拟产品年度收入(千美元)
$700,000 $650,000 $600,000 $550,000 $500,000 $450,000 $400,000 $350,000 $300,000 $250,000 $200,000 $150,000 $100,000 $50,000 $0
1602
内部 LDO
补偿器
“模拟”控制
26
数字增强型控制器
产品树
数字增强型电源模拟 控制器
MCP19110/1 采用同步驱动器降压拓扑 的32V增强型电源模拟控 制器
MCP19118/19 采用同步驱动器降压拓扑 的40V增强型电源模拟控 制器
MCP19114/5 采用同步驱动器升压拓扑 的42V增强型电源模拟控 制器
易于使用的解决方案降低了对电源专业知识的要 求。EMI性能符合CISPR22,B类标准,非常适合 工业应用。
1602
高端消费市场
19
控制器应用
4.5V至75V 宽Vin范围
处理高功率密度应用
稳定的 Any CapacitorTM
Hyper Speed ControlTM 架构可实现具有超快速瞬态响应 的高压差操作,与传统解决方案相比只需要很小的输出电 容。
未来扩展将填补空白
集成开关稳压器、控制器 和模块
MIC28511和MIC45208
输入电压(V)
60V 40V
MCP1703A 线性稳压 MCP1754/5 器
集成 开关 稳压器
MCP16301/H MCP16311/2
DEPA或(MCU + PWM控制 器)+ 外部MOSFET
+ MCP87xxx——高速 MOSFET
同类产品中最低的静态电流
1602
13
应用
3V/5V MCU电源电压 汽车 可穿戴产品 电池供电产品 通用低电压分布式电源 噪声敏感型系统 空间受限的PCB
1602
14
精选控制器和电源模块
器件编号 MIC2176 MIC2103 MIC2104 MIC28303 MIC28304 MIC45208* 电压范围 4.5V至75V 4.5V至75V 4.5V至75V 4.5V至50V 4.5V至70V 4.5V至26V 拓扑 同步直流-直流降压控制器 具有可编程频率和超轻载控制的同步 直流-直流降压控制器 具有可编程频率的同步 直流-直流降压控制器 3A降压电源模块 3A降压电源模块 10A降压电源模块
1602
电压范围 2.3V至30V 1.5V至6V 6V至120V 6V至120V 1.6V至5.5V 2.5V至6V 2.5V至5.5V 2.5V至5.5V 2.5V至5.5V 2.2V至26V 2.2V至26V 2.2V至26V 2.2V至26V
IOUT 150 mA 150 mA 50 mA 150 mA 150 mA 150 mA 150 mA 300 mA 500 mA 1500 mA 3000 mA 5000 mA 7500 mA
MPU
D/A
串行SRAM
非易失性 存储器
功率
直流-直流转换器 DEPA 监控器
FPGA
ASIC
LCD 驱动器
LED 驱动器
时钟 和定时器
总线通信 • CAN • USB 数字外设 • PWM • RTCC (KEELOQ® IC) 语音 协同处理 烟雾探测器 和压电 喇叭驱动器 以太网 控制器和 收发器
超声
超声产品
1602
6
提供全方位的解决方案
功率 放大器
数字 电位器
高精度 参考 电压
RF发送/接收 • Wi-Fi® • Bluetooth® • LoRa® • ZigBee® /MiWi™
高电压 I/O
IR 通信
电机 驱动器
处理器
A/D
功率 驱动器
传感器
放大器
滤波器
PIC® dsPIC® MCU
电源 管理
电机驱动器 系统监控器 电压检测器 电源开关 热插拔 电源控制器 DDR和 SCSI终结器 显示屏/LED驱动器
混合信号
A/D转换器 电流/直流功率 测量IC 功率 监控和计量
接口
DAC和数字电位器
参考 电压
时序
定时器
温度 管理
温度 传感器 风扇控制和 管理
安全与 安防
烟雾探测器IC 压电 喇叭驱动器
与竞争产品相比,Micrel模块提供 卓越的散热性能
MIC45212
1602
17
出色的EMI性能(CISPR22, B类)
12V_3.3V_1A(使用缓冲电路)
12V_3.3V_8A(使用缓冲电路)
1602
18
应用
分布式电源系统
IC工作范围宽,非常适合5V/12V/24V总线系统
服务器/数据存储 嵌入式电信系统 工业/通信基础设施
30V
4.5V
MCP1703A MCP1754/5
PIC 或dsPIC + MOSFET 驱动器
< 1W
1602
< 10W < 50W 功率(W)
< 150W
300W <
9
扩展LDO工作电压和负载电 流
120V
7.5A
30V
通过汽车标准认证
1602
10
精选LDO
器件编号 MIC5236 MIC5238 MIC/MAQ5282 MIC5283 MIC5308 MIC5317 MIC5365 MIC5504 MIC5524 MIC29151 MIC29301/3 MIC29501/3 MIC29751
1602
“模拟”控制
23
什么是数字增强型 电源模拟产品?
全 数字 控制
数字控制
技术
混合控制
(模拟 + 数字)
全 模拟控制 模拟
技术
控制
PWM发生器 外设
MOSFET 驱动器
PWM 比较器 误差 放大 器 VREF
MOSFET 驱动器 VFB
控制器—MCU (系数和 工作设定值)
A/D 转换器
VFB
补偿器 控制器
比较器
“数字”控制
1602
“模拟”控制
24
什么是数字增强型 电源模拟产品?
混合控制
全 数字 控制
数字控制
技术
(模拟 + 数字)
数字增强型电源 模拟控制
全 模拟控制 模拟
技术
控制
PWM发生器 外设
MOSFET 驱动器
PWM 比较器 误差 放大 器 VREF
MOSFET 驱动器 VFB
控制器—MCU (系数和 工作设定值)
*还提供6A和14A的选项
1602
15
功率密度高且节省空间
MIC28304
高达70V
简单焊盘布局优化散热性能,并解决了 装配问题
工业级
12 x 12 x 3 mm3
MIC45205
MIC45208
MIC45212
高达26V
12 mm 12 mm 25.4 mm 32.5 mm
企业级
8x8x3 mm3
11
多种小型封装可供选择
2 mm 10
9
8 7 6 5 4 3 2 1 0
89%
比3x3 DFN更小
1x1 DFN 1.6x1.6 DFN SC70 SOT23
12
1602
高性能
更高的PSRR
80 dB-90 dB LDO的理想选择 非常适合噪声敏感型应用或MCU
更低的压差
提高电池供电应用的效率以适应输入与输出之 间差值的不断缩小 使高电压或高电流应用实现最低静态电流
FY02
FY03
FY04
FY05
FY06
FY07
FY08
FY09
FY10
FY11
FY12
FY13
FY14
FY15
1602
FY16 RR
5
模拟和接口产品
线性
放大器 比较器 直流/直流转换器 PWM控制器 电池充电器 电源模块 CAN、CAN FD和LIN HV接口 USB和 I/O扩展器 以太网 无线 实时 时钟/日历 功率 MOSFET驱动器 功率MOSFET
4000 3800 3600 3400 3200 3000 2800 2600 2400 2200 2000 1800 1600 1400 1200 1000 800 600 400 200 0
1602
3156
1526 1139 1068 644 718 776
73
87
199 261 132 98
408 450 473 497 377 299 343