第11章_外差检测系统解读
合集下载
光电测试技术激光外差干涉

管道内水流流层研究; 流速分布/亚音速或超音速气流/旋流的测量 大气远距离测量; 风速测量 可燃气体火焰的流体力学研究; 水洞、风洞和海流测量
2019/1/22
2)双纵模He-Ne激光器——频差约600MHz(较大) 3)光学机械移频
当干涉仪中的参考镜以匀速v 沿光轴方向移动时,则垂直入射的
反射光将产生的频移为 2v / 。
如果圆偏振光通过一个旋转中的半波片,则透射光将产生两倍于
半波片旋转频率f 的频移,即 v 2 f 。
2019/1/22
15
多普勒效应的应用
美国霍普金斯大学利用多普勒效应 对苏联第一颗人造卫星进行了跟踪 试验,科学家发现,当卫星在近地 点时信号频率就增加,远地点时信 号频率就降低。因为卫星轨道是已 知的,所以接收卫星信号的接收机 不论处于何方,它的位置都能被测 定。
2019/1/22
16
光波的多普勒效应
光外差探测系统
光外差探测在激光通信、雷达、测长、测速、测振、光谱学等方面
都很有用。其探测原理与微波及无线电外差探测原理相似。光外差探 测与光直接探测比较,其测量精度要高7~8个数量级。 激光受大气湍流效应影响严重,破坏了激光的相干性,因而目前远距 离外差探测在大气中应用受到限制,但在外层空间特别是卫星之间通 信联系已达到实用阶段。
As AL cos[L s t s L ] As AL cosL s t L s
: 量子效率;h :光子能量; L :s 差频。 S q / h;
式中第一、二项为余弦函数平方的平均值,等于1/2。 第三项(和频项)是余弦函数的平均值为零。而第四项(差频项)相对光频 而言,频率要低得多。 L s / 2 当差频 L s / 2 低于光探测器的截止频率时,光探测器就有频率为 的光电流输出。
2019/1/22
2)双纵模He-Ne激光器——频差约600MHz(较大) 3)光学机械移频
当干涉仪中的参考镜以匀速v 沿光轴方向移动时,则垂直入射的
反射光将产生的频移为 2v / 。
如果圆偏振光通过一个旋转中的半波片,则透射光将产生两倍于
半波片旋转频率f 的频移,即 v 2 f 。
2019/1/22
15
多普勒效应的应用
美国霍普金斯大学利用多普勒效应 对苏联第一颗人造卫星进行了跟踪 试验,科学家发现,当卫星在近地 点时信号频率就增加,远地点时信 号频率就降低。因为卫星轨道是已 知的,所以接收卫星信号的接收机 不论处于何方,它的位置都能被测 定。
2019/1/22
16
光波的多普勒效应
光外差探测系统
光外差探测在激光通信、雷达、测长、测速、测振、光谱学等方面
都很有用。其探测原理与微波及无线电外差探测原理相似。光外差探 测与光直接探测比较,其测量精度要高7~8个数量级。 激光受大气湍流效应影响严重,破坏了激光的相干性,因而目前远距 离外差探测在大气中应用受到限制,但在外层空间特别是卫星之间通 信联系已达到实用阶段。
As AL cos[L s t s L ] As AL cosL s t L s
: 量子效率;h :光子能量; L :s 差频。 S q / h;
式中第一、二项为余弦函数平方的平均值,等于1/2。 第三项(和频项)是余弦函数的平均值为零。而第四项(差频项)相对光频 而言,频率要低得多。 L s / 2 当差频 L s / 2 低于光探测器的截止频率时,光探测器就有频率为 的光电流输出。
外差(相干)探测系统 2013.4.26

式中 k1 2 / 1 和k2 2 / 2为波数, 1 和2 为
初位相。
这二列波叠加的结果为:
x 1 2 Es {2 E cos[ (t ) ]} 2 c 2 1 2 x 1 2 cos[ (t ) ] 1 2 c / 1 2 c 2
iC t As AL cos L s
这是外差探测的一种特殊形式,称为零差探测。
外差检测与直接检测的性能比较
• 探测能力强:光波的振幅、相位及频率的变化 都会引起光电探测器的输出,因此外差探测不 仅能够检测出振幅和强度调制的光波信号,而 且可以检测出相位和频率调制的光信号
基本特性
fs fL
(8.1 - 16)
外差探测具有更窄的接收带宽,即对背景光有良好
的滤波性能。
• 滤波性能好
– 形成外差信号,要求信号光和本征信号空间严 格对准,而背景光入射方向是杂乱无章的,偏 振方向也不确定,不能满足外差空间调准要求, 不能形成有效的外差信号,因此该方法可以滤 掉背景光 – 同时通过检测通道的通频带刚好覆盖有用的外 差信号的频谱范围,这样杂散光形成的拍频信 号也可以被滤掉
那么测出这个低频的波速,也就测出了光速。
问题5:如何将光信号变成含低频成份的“光 拍”信号?
原理:根据振动叠加原理,两列速度相 同、振面相同、频差较小而同向传播的简谐
波的叠加即形成拍。
设有两列振幅相同、频率分别为f1和f2,且 频差△f= f1-f2很小的二列波:
E1 E cos(1t k1 x 1 ) E2 E cos( 2t k2 x 2 )
•
q / h ; :
两束光频率必须足够接近,差频信号才能处于探测器的通 频带范围内
初位相。
这二列波叠加的结果为:
x 1 2 Es {2 E cos[ (t ) ]} 2 c 2 1 2 x 1 2 cos[ (t ) ] 1 2 c / 1 2 c 2
iC t As AL cos L s
这是外差探测的一种特殊形式,称为零差探测。
外差检测与直接检测的性能比较
• 探测能力强:光波的振幅、相位及频率的变化 都会引起光电探测器的输出,因此外差探测不 仅能够检测出振幅和强度调制的光波信号,而 且可以检测出相位和频率调制的光信号
基本特性
fs fL
(8.1 - 16)
外差探测具有更窄的接收带宽,即对背景光有良好
的滤波性能。
• 滤波性能好
– 形成外差信号,要求信号光和本征信号空间严 格对准,而背景光入射方向是杂乱无章的,偏 振方向也不确定,不能满足外差空间调准要求, 不能形成有效的外差信号,因此该方法可以滤 掉背景光 – 同时通过检测通道的通频带刚好覆盖有用的外 差信号的频谱范围,这样杂散光形成的拍频信 号也可以被滤掉
那么测出这个低频的波速,也就测出了光速。
问题5:如何将光信号变成含低频成份的“光 拍”信号?
原理:根据振动叠加原理,两列速度相 同、振面相同、频差较小而同向传播的简谐
波的叠加即形成拍。
设有两列振幅相同、频率分别为f1和f2,且 频差△f= f1-f2很小的二列波:
E1 E cos(1t k1 x 1 ) E2 E cos( 2t k2 x 2 )
•
q / h ; :
两束光频率必须足够接近,差频信号才能处于探测器的通 频带范围内
微波传感器
滞后。用接收机将来自发射机的参照信号Ue sin2πf0t与上述反射 信号混合后,进行超外差检波,则可得到如下式那样的具有两
频率之差,即fD
ud
Ud
s
in
2f
Dt
4f0r
c
(11-6)
第11章 微 波 传 感 器
因此,根据测量到的差拍信号频率,可测定相对速度。但是, 用此方法不能测定距离。为此考虑发射频率稍有不同的两个电 波f1和f2,这两个波的反射波的多卜勒频率也稍有不同。 若测 定这两个多卜勒输出信号成分的相位差为ΔΦ,则可利用下式 求出距离r:
第11章 微 波 传 感 器
由 微 波 振 荡 器 产 生 的 振 荡 信 号 需 要 用 波 导 管 ( 管 长 为 10 cm以上,可用同轴电缆)传输,并通过天线发射出去。为了使 发射的微波具有尖锐的方向性,天线要具有特殊的结构。常用 的天线如图11-1所示,其中有喇叭形天线(图(a) 、(b))、 抛物面天线(图(c)、(d))、 介质天线与隙缝天线等。
第11章 微 波 传 感 器
第11章 微 波 传 感 器
11.1 微波概述 11.2 微波传感器的原理和组成 11.3 微波传感器的应用
第11章 微 波 传 感 器
11.1 微波概述
微波是波长为1 mm~1 m的电磁波,可以细分为三个波段: 分米波、厘米波、毫米波。微波既具有电磁波的性质,又不同于 普通无线电波和光波的性质,是一种相对波长较长的电磁波。微 波具有下列特点:
微波温度传感器最有价值的应用是微波遥测,将它装在航 天器上,可以遥测大气对流层的状况,可以进行大地测量与探 矿,可以遥测水质污染程度,确定水域范围,判断植物品种等。
第11章 微 波 传 感 器
检验系统操作指导课件

样品检测技巧与注意事项
检测方法选择
根据样品类型和检测需求选择合适的检测方法。
仪器校准
检测仪器应定期进行校准,以确保检测结果的准 确性。
试剂与耗材质量
试剂和耗材应符合质量要求,避免因耗材问题导 致检测结果失真。
数据处理与分析技巧与注意事项
1 2
数据输入
数据输入应准确无误,且应进行核对和校验。
数据处理方法
根据检测需求选择合适的数据处理方法,如统计 、回归分析等。
3
数据解读
对处理后的数据进行解读,以得出检测结果和结 论。
报告生成与审核技巧与注意事项
报告格式规范
报告应符合规范要求,包括标题、摘要、目录 等部分。
数据展示
数据应清晰明了,可采用图表、表格等形式展 示。
审核流程
报告应经过严格的审核流程,确保其准确性和可靠性。
检验系统广泛应用于制造业、医疗保健、食品药品、环境保护等领域。它能够对 各种产品、过程和环境进行测量和评估,帮助企业提高产品质量和生产效率。
检验系统的限制
检验系统也存在一些限制,如检测精度和可靠性、检测成本和时间等方面的限制 。此外,不同行业和领域对检验系统的需求和要求也不同,因此需要根据具体情 况进行选择和应用。
检验系统操作指导 课件
目 录
• 检验系统概述 • 检验系统操作流程 • 检验系统操作技巧与注意事项 • 检验系统常见问题及解决方案 • 检验系统操作实例分析
01
检验系统概述
检验系统的定义与作用
检验系统定义
检验系统是指用于实验、检测和数据分析的系统,它能够提供对产品、过程或 环境的测量和评估。
检验系统的作用
报告存档
将检验报告和相关数据资料存档备查。
航天外测系统讲课文档
航天外测系统
第1页,共42页。
一个例子是:当一辆紧急的火车(汽车)鸣着喇叭以相 当高的速度向着你驶来时,声音的音调(频率)由于波的 压缩(较短波长)而增加。当火车(汽车)远离你而去时 ,这声音的音调(频率)由于波的膨胀(较长波长)而减 低。
第2页,共42页。
2 多普勒频率与径向速度的关系
假设多普勒发射机发射脉冲的工作频率为fT,目标与发射机的距离为R,
T T
信号传播时间的测定
第23页,共42页。
4测距码测距原理②
• 利用测距码测距的必要条件
– 必须了解测距码的结构
• 利用测距码进行测距的优点
– 采用的是CDMA(码分多址 )技术
每颗GPS卫星都采用特定的 伪随机噪声码
– 易于捕获微弱的卫星信号
– 可提高测距精度
– 便于对系统进行控制和管理 (如AS)
航天飞行器测速的技术思路:多普勒频率测量——经向速度——飞行速度
•
R fd
f
fT
c
fT
4.4
•
R
XXR
X• YYR
•
Y
Z
ZR
•
Z
SR
SR
SR
4.5
1
• • •2
V X2Y2Z2
4.6
•多普勒测速系统有多种形式,按电磁波辐射源位置不同分为单向和 双向多普勒测速系统;按信号源发射的频率个数分为单频和双频测速 系统。
微弱信号的捕获
第24页,共42页。
5伪距测量的特点
• 优点
– 无模糊度
• 缺点
– 精度低
第25页,共42页。
4.5 角度测量
测控系统的任务是对飞行器进行测量和控制,而要实现此目标,首先要通过 一种手段,使天线的波束对准飞行目标,以便使天线能感应到来自目标的电磁波 。测试工具就是运用雷达。
第1页,共42页。
一个例子是:当一辆紧急的火车(汽车)鸣着喇叭以相 当高的速度向着你驶来时,声音的音调(频率)由于波的 压缩(较短波长)而增加。当火车(汽车)远离你而去时 ,这声音的音调(频率)由于波的膨胀(较长波长)而减 低。
第2页,共42页。
2 多普勒频率与径向速度的关系
假设多普勒发射机发射脉冲的工作频率为fT,目标与发射机的距离为R,
T T
信号传播时间的测定
第23页,共42页。
4测距码测距原理②
• 利用测距码测距的必要条件
– 必须了解测距码的结构
• 利用测距码进行测距的优点
– 采用的是CDMA(码分多址 )技术
每颗GPS卫星都采用特定的 伪随机噪声码
– 易于捕获微弱的卫星信号
– 可提高测距精度
– 便于对系统进行控制和管理 (如AS)
航天飞行器测速的技术思路:多普勒频率测量——经向速度——飞行速度
•
R fd
f
fT
c
fT
4.4
•
R
XXR
X• YYR
•
Y
Z
ZR
•
Z
SR
SR
SR
4.5
1
• • •2
V X2Y2Z2
4.6
•多普勒测速系统有多种形式,按电磁波辐射源位置不同分为单向和 双向多普勒测速系统;按信号源发射的频率个数分为单频和双频测速 系统。
微弱信号的捕获
第24页,共42页。
5伪距测量的特点
• 优点
– 无模糊度
• 缺点
– 精度低
第25页,共42页。
4.5 角度测量
测控系统的任务是对飞行器进行测量和控制,而要实现此目标,首先要通过 一种手段,使天线的波束对准飞行目标,以便使天线能感应到来自目标的电磁波 。测试工具就是运用雷达。
光外差探测原理
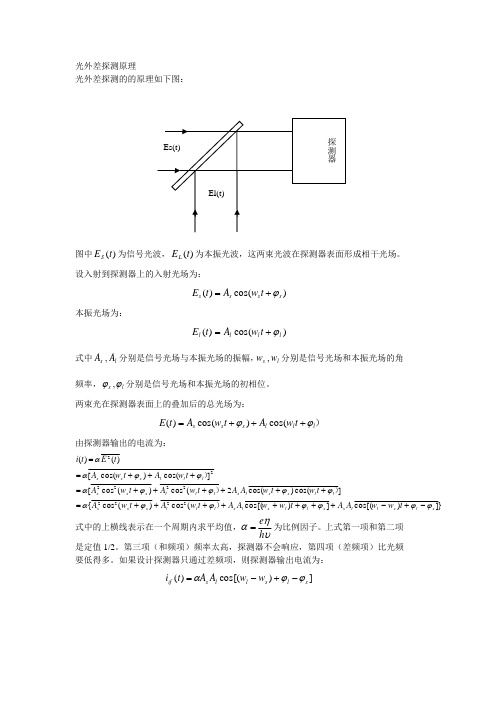
光外差探测原理光外差探测的的原理如下图:图中)(t E S 为信号光波,)(t E L 为本振光波,这两束光波在探测器表面形成相干光场。
设入射到探测器上的入射光场为:)cos()(s s s s t w A t E ϕ+=本振光场为:)cos()(l l l l t w A t E ϕ+=式中s A ,l A 分别是信号光场与本振光场的振幅,s w ,l w 分别是信号光场和本振光场的角频率,s ϕ,l ϕ分别是信号光场和本振光场的初相位。
两束光在探测器表面上的叠加后的总光场为:)l l l s s s t w A t w A t E ϕϕ+++=cos()cos()( 由探测器输出的电流为:}])cos[(])cos[((cos )(cos {]cos()cos(2(cos )(cos []cos()cos([)()(2222222222s l s l l s s l l s l s l l l s s s l l s s l s l l l s s s l l l s s s t w w A A t w w A A t w A t w A t w t w A A t w A t w A t w A t w A t E t i ϕϕϕϕϕϕαϕϕϕϕαϕϕαα-+-++++++++=++++++=+++==))))式中的上横线表示在一个周期内求平均值,υηαh e =为比例因子。
上式第一项和第二项是定值1/2。
第三项(和频项)频率太高,探测器不会响应,第四项(差频项)比光频要低得多。
如果设计探测器只通过差频项,则探测器输出电流为:])cos[()(s l s l l s if w w A A t i ϕϕα-+-=。
光外差检测系统

滤光片
M
v
Q
BS
uv
PMT
ei
Q es
进入光阑由透镜会聚到光电倍增 管的光电阴极上的有两束频率相 近的光,发生干涉。
参考光模式
双缝 屏幕
S1
P
S1
S2
δ=0
P 中央亮纹
S2
由于从S1S2发出的光是振动情况完
全相同,又经过相同的路程到达P点,
其中一条光传来的是波峰,另一条
传来的也一定是波峰,其中一
条光传来的是波谷,另一条传来的也一定是波谷,在P点激起的
振动总是波峰与波峰相遇或波谷与波谷相遇,振幅A=A1+A2为 最大,P点总是振动加强的地方,故应出现亮纹,这一条亮纹叫中 央亮纹.
19世纪末光电效应现象使得 爱因斯坦在20世纪初提出了 光子说:光具有粒子性
波动说
光的干涉---预备知识复习
干涉现象是波动独有的特征,如果光真的 是一种波,就必然会观察到光的干涉现象.
思考1:如果我们先假设光是一种 波,那么按照我们所学的波动知 识,光要发生干涉现象需要满足 什么条件?
(频率相同)
光外差检测:可见光的频率很高(1014 Hz),一般光电器件不能响应,也就无法直接 检测多普勒频移.因此,需要光外差的方法:
概念—声波多普勒效应
一辆汽车在我们身旁急 驰而过,车上喇叭的音调有 一个从高到低的突然变化; 站在铁路旁边听列车的汽笛 声也能够发现,列车迅速迎 面而来时音调较静止时为高, 而列车迅速离去时则音调较 静止时为低。此外,若声源 静止而观察者运动,或者声 源和观察者都运动,也会发 生收听频率和声源频率不一 致的现象。这种现象称为多 普勒效应。
讨论:明和暗为什么相间(依次出现)呢?
直接探测和外差全面讲解

(3.1 - 7) (3.1 - 8)
从上式可以得出如下结论: (1) 若si/ni<<1, 则有
2
so no
si ni
(3.1 - 9)
输出信噪比近似等于输入信噪比的平方。 这说明直 接探测方式不适宜于输入信噪比小于1或者微弱信号的探 测。 实际上, 要想对弱光信号实施直接探测, 还必须在 探测体制上进行改革, 这个问题我们在后面分节中将进 行专门讨论。
除背景干扰的效果, 并使光学系统的信噪比为最大。
现举一例说明光谱滤光的作用。 图3.2 - 1示出了飞机涡轮
喷气发动机辐射的光谱曲线a, 典型的地面背景辐射的光谱辐射
通量密度曲线b, 大气透过率曲线c及某型号光电探测器光谱响
应曲线d, 根据这些曲线关系, 选择滤波片的截止波长λ1和λ2。
从图3.2 - 1可看出, 目标辐射通量相对值在0.8以上的波
的计算也和场镜直径的计算方法一致。 它的小端直径为探测器的
直径。 长度l与锥角β的大小要设计合理, 否则有的光线还未传播
到小端就被折返回大端, 如图3.2 - 5所示。
显然, 锥顶角2β与半视场角ω(即光线在光锥端面上的入
射角θ)以及光线与第一反射线的入射角i1的关系为
(90°-β)+(90°-i1)+(90°-θ)=180°
长区域约在2.7~5 μm的范围内, 而背景辐射通量相对值在0.2以
下的波长约在2.6~4.5 μm的范围内。 于是, 把滤光片的短波截
止波长选在大于2.7 μm处, 长波截止波长选在小于4.5 μm处。
因为在大于4.5 μm和小于2.7 μm的范围内, 目标辐射通量在减
小, 背景辐射通量急剧上升。 最后选定滤光片的截止波长为2.8