噶米第三章连接课后习题参考答案
微机原理与接口技术 第三章 课后答案
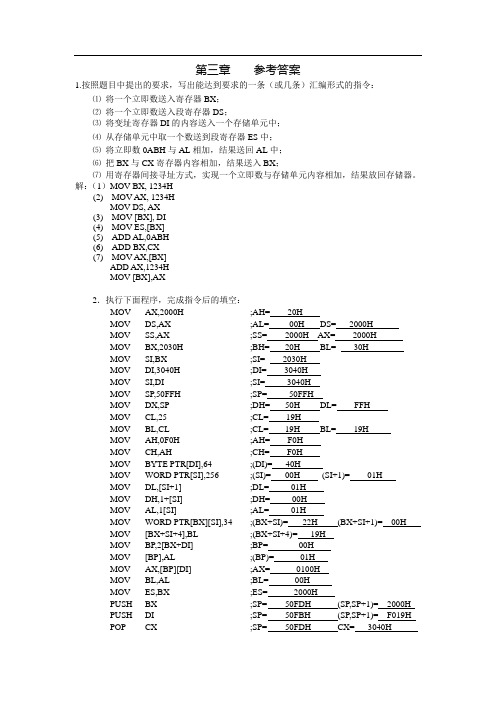
第三章参考答案1.按照题目中提出的要求,写出能达到要求的一条(或几条)汇编形式的指令:⑴将一个立即数送入寄存器BX;⑵将一个立即数送入段寄存器DS;⑶将变址寄存器DI的内容送入一个存储单元中;⑷从存储单元中取一个数送到段寄存器ES中;⑸将立即数0ABH与AL相加,结果送回AL中;⑹把BX与CX寄存器内容相加,结果送入BX;⑺用寄存器间接寻址方式,实现一个立即数与存储单元内容相加,结果放回存储器。
解:(1)MOV BX, 1234H(2)MOV AX, 1234HMOV DS, AX(3)MOV [BX], DI(4)MOV ES,[BX](5)ADD AL,0ABH(6)ADD BX,CX(7)MOV AX,[BX]ADD AX,1234HMOV [BX],AX2.执行下面程序,完成指令后的填空:MOV AX,2000H ;AH= 20HMOV DS,AX ;AL= 00H DS= 2000HMOV SS,AX ;SS= 2000H AX= 2000HMOV BX,2030H ;BH= 20H BL= 30HMOV SI,BX ;SI= 2030HMOV DI,3040H ;DI= 3040HMOV SI,DI ;SI= 3040HMOV SP,50FFH ;SP= 50FFHMOV DX,SP ;DH= 50H DL= FFHMOV CL,25 ;CL= 19HMOV BL,CL ;CL= 19H BL= 19HMOV AH,0F0H ;AH= F0HMOV CH,AH ;CH= F0HMOV BYTE PTR[DI],64 ;(DI)= 40HMOV WORD PTR[SI],256 ;(SI)= 00H (SI+1)= 01HMOV DL,[SI+1] ;DL= 01HMOV DH,1+[SI] ;DH= 00HMOV AL,1[SI] ;AL= 01HMOV WORD PTR[BX][SI],34 ;(BX+SI)= 22H (BX+SI+1)= 00HMOV [BX+SI+4],BL ;(BX+SI+4)= 19HMOV BP,2[BX+DI] ;BP= 00HMOV [BP],AL ;(BP)= 01HMOV AX,[BP][DI] ;AX= 0100HMOV BL,AL ;BL= 00HMOV ES,BX ;ES= 2000HPUSH BX ;SP= 50FDH (SP,SP+1)= 2000HPUSH DI ;SP= 50FBH (SP,SP+1)= F019HPOP CX ;SP= 50FDH CX= 3040HPOP DX ;SP= 50FFH DX= 2000HXCHG AX,BP ;AX= 0000H BP= 0100HXCHG DH,BL ;DH= 00H BL= 20HLAHF ;FLAG= 0002H AH= 02HSAHF ;FLAG= 0002H AH= 02HPUSHF ;SP= 50FDH (SP,SP+1)= 0002HPOPF ;SP= 50FFH FLAG= 0002H3.设DS=2000H,ES=2100H,SS=1500H,SI=00A0H。
自动控制原理第三章课后习题答案

⾃动控制原理第三章课后习题答案3-1 设系统的微分⽅程式如下:(1) )(2)(2.0t r t c =&(2) )()()(24.0)(04.0t r t c t c t c =++&&&试求系统闭环传递函数Φ(s),以及系统的单位脉冲响应g(t)和单位阶跃响应c(t)。
已知全部初始条件为零。
解:(1)因为)(2)(2.0s R s sC =闭环传递函数ss R s C s 10)()()(==Φ单位脉冲响应:s s C /10)(= 010)(≥=t t g单位阶跃响应c(t) 2/10)(s s C = 010)(≥=t t t c(2))()()124.004.0(2s R s C s s =++ 124.004.0)()(2++=s s s R s C 闭环传递函数124.004.01)()()(2++==s s s R s C s φ单位脉冲响应:124.004.01)(2++=s s s C t e t g t 4sin 325)(3-= 单位阶跃响应h(t) 16)3(61]16)3[(25)(22+++-=++=s s s s s s Ct e t e t c t t 4sin 434cos 1)(33----=3-2 温度计的传递函数为11+Ts ,⽤其测量容器内的⽔温,1min 才能显⽰出该温度的98%的数值。
若加热容器使⽔温按10oC/min 的速度匀速上升,问温度计的稳态指⽰误差有多⼤?解法⼀依题意,温度计闭环传递函数11)(+=ΦTs s 由⼀阶系统阶跃响应特性可知:o o T c 98)4(=,因此有 min 14=T ,得出 min 25.0=T 。
视温度计为单位反馈系统,则开环传递函数为Tss s s G 1)(1)()(=Φ-Φ===11v TK ⽤静态误差系数法,当t t r ?=10)( 时,C T Ke ss ?===5.21010。
第3章习题答案
“微处理器系统原理与嵌入式系统设计”第三章习题解答3.1什么是冯·诺伊曼计算机结构?其运行的基本原理如何?冯.诺依曼计算机由运算器、控制器、存储器、输入设备和输出设备构成,采用二进制表示信息,以存储器为中心,按存储程序原理工作。
存储程序原理指编好的程序首先放入存储器,开始工作后,由控制器自动、高速依次从存储器中取出指令并执行。
3.2. 微处理器的体系结构可以分为几种?试分别说明各种体系结构的优缺点。
3.3 高级编程语言、汇编语言以及机器语言之间有哪些不同?机器语言是直接用二进制代码表达的计算机语言。
指令用“0”和“1”组成,并分成若干段,各段的编码表示不同的含义。
机器语言面向硬件,是唯一可以由硬件直接执行的语言。
汇编语言采用符号代替机器语言中的二进制码:用助记符(Mnemonic)代替操作码,用地址符号(Symbol)或标号(Label)代替地址码。
汇编语言与机器语言一一对应,因此不具有移植性,但更易于读写和理解。
汇编语言源程序需要汇编成机器语言才能交给硬件执行。
高级编程语言语法和结构更类似普通英文,且由于远离对硬件的直接操作,因此移植性较好。
高级语言源程序需要编译(或解释)成机器语言才能交给硬件执行。
3.5 什么是计算功能指令、数据传输指令以及控制流程指令?计算功能指令:对数据进行处理完成算术运算或逻辑运算等的指令。
数据传输指令:负责把数据、地址或立即数传送到寄存器、I/O端口或存储单元中,或者反方向传送的指令。
控制流程指令:用来控制程序执行流程的指令,有测试、转移、跳转等子类。
3.6 解释跳转、分支、调用以及中断所需进行的操作。
跳转:根据“跳转”指令指计算目的地址,修改程序指针。
分支:根据“分支”指令判断执行条件,计算跳转地址,修改程序指针。
调用:保存断点,根据“调用”指令计算子程序入口地址,修改程序指针,执行完毕后恢复断点。
中断:保护断点及现场,查找中断向量表以确定中断程序入口地址,修改程序指针,执行完毕后恢复现场及断点。
信号与系统第三章习题答案
=2 T
T +t0 t0
f
t
cos nω0tdt
∫ ( ) bn
=
2 T
T+t0 t0
f
t
sin
nω0 tdt
n = 1,2,L n = 1,2,L
信号指数型为:
∞
∑ ( ) f t =
F e jnω0t n
n= −∞
Fn = Fn e jϕ n
96
∫ ( ) Fn
=
1 T
f t0 +T
+L
∑ =
a0 2
+
∞
(an
n=1
cos nω 0t
+ bn
sin
nω 0t)
式中 a0 , an , bn 称为傅里叶系数,分别代表了信号 f (t ) 的直流分量,余弦分量和正经弦分量的振荡幅度,
其值分别由下式确定:
∫ ( ) a0
=
2 T
f T + t0
t0
t dt
∫ ( ) an
4 T
π
2 cos t cos ntdt
0
=
2 T
π
∫2
0
[cos(n
+ 1)t
+
cos(n
− 1)t ]dt
( ) =
2 T
n
1 +
1
sin
π
2(n +
1)
+
1 sin n −1
π
2(n −
1)
=
−
n2
2 −1π
cos
nπ 2
该信号的三角傅里叶级数为
奥本海姆 信号与系统 习题参考答案

.第三章作业解答3.1解:420ππω==T , j a a 4*33-==- 则:t j t j t j t j k tjk ke a e a e a e a ea t x 00000333311)(ωωωωω----∞-∞=+++==∑-)243cos(84cos 443sin 84cos 4)](21[8)(2144422434344434344πππππππππππππ++=-=--⨯++⨯=-++=------t t tt e e je e jejeeet j t j t j t j t jt jt j t j3.3解:)35sin(4)32cos(2)(t t t x ππ++= 则3)32cos(1=→T t π 56)35s i n (2=→T t π故:6],[21==T T lcm T 320ππω==T )(214)(21235353232t j t j t j t j e e je e ππππ---⨯+++=则:20=a 2122==-a a 25j a -= 25j a =- 3.9x[n]波形如下图所示:0 1 4 5 n…- 4 -3则:N=4,220ππω==N ]84[41]}1[8][4{41][41][122302300πππωδδjk n jk n n jk n n jk N n k e e n n e n x e n x N a --=-=->=<+=-+===∑∑∑即:2112133210j a a j a a +=-=-==3.15解:6π=T ,1220==Tπω )(ωj H 如下图所示:则:⎩⎨⎧>≤=9||08||1)(0k k jk H ωtjk k kea t x 0)(ω∑∞-∞==tjk k ktjk k k ea ea jk H t y 00880)()(ωωω∑∑-=∞-∞===而:)()(t y t x =,即:t jk k k tjk k k e a t y ea t x 0088)()(ωω∑∑-=∞-∞====故:当9||≥k 时,0=k a3.22解:(a )2=T ,ππω==T20 ]|[12121)(11111110dt e te jk dt te dt e t x T a tjk t jk t jk T t jk k ⎰⎰⎰---------===πππωπkjk t jk t jk k j k j k k je k j e jk te k j )1(k ]02[21]|1|[211111-=⎪⎪⎩⎪⎪⎨⎧-=--=---=-----πππππππππ为奇数为偶数021110==⎰-dt t a(注意:与性质验证,由于x(t)是实奇函数,则a k 为纯虚的奇函数,满足: *k k k a a a -=-=- 且:00=a ) (d) 2=T ,ππω==T20 ])1(21[21]21[21)]1(2)([21)(1200k jk t jk T tjk k e dt e t t dt e t x T a --=-=--==---⎰⎰--ππωδδ21)]1(2)([21200-=--=⎰--dt t t a δδ3.28(b )解:)(21)(21)2cos()32sin(][223232nj n j n jnje e eejn n n x ππππππ--++== )(416/76/6/6/7n j n j n j n j e e e e j ππππ----+=12/2.712/2.12/2.12/2..7(41ππππn j jn jn n j e e e e j----+=⎪⎪⎪⎩⎪⎪⎪⎨⎧++=-++==othersrN rN k j rN rN k j a k 05,11417,141 则:⎪⎩⎪⎨⎧++++==othersrN rN rN rN k a k 05,11,7,141||⎪⎪⎪⎩⎪⎪⎪⎨⎧++=++=-=∠othersrN rN k rN rN k a k 05,1127,12ππ 3.34解:(b)∑∞-∞=--=n nn t t x )()1()(δ其波形如下图所示:其周期T=2,基波频率为:ππω==T20 ⎩⎨⎧=--=-=--==---⎰⎰--是偶数是奇数k 01])1(1[21]1[21)]1()([21)(1200k e dt e t t dt e t x T a k jk t jk T tjk k ππωδδ而:⎪⎩⎪⎨⎧<>==--00)(44||4t et e et h t tt则:240401684141)()(s s s dte e dt e e dt e t h s H st t st t st -=++-=+==--∞-∞--∞∞-⎰⎰⎰故:2)(168)(ππjk jk H -=故:⎪⎩⎪⎨⎧-==∑∞-∞=为偶数为奇数(k k e jk ea jk H t y tjk tjk k k 0)168)()(200πωπω3.357π=T ,1420==Tπω 解:)(ωj H 如下图所示:则:⎩⎨⎧<>=17||017||1)(0k k jk H ωtjk k kea t x 0)(ω∑∞-∞==tjk k k tjk k k ea ea jk H t y 0018||0)()(ωωω∑∑∞=∞-∞===而:)()(t y t x =,即:tjk k ktjk k kea t y ea t x 0018||)()(ωω∑∑∞=∞-∞====故:当18||<k 时,0=k a3.44解:(1)*k k a a =- (2)6=T ,320ππω==T (3)⎩⎨⎧===其他,不为02||1||0k k a k(4)k jk k k a e b t x a t x π--=→--→)3()(k jk k a ea π--= 则:当为偶数k a k 0=结合(3)则:⎩⎨⎧==其他不为01||0k a k(5)帕斯瓦尔关系式:21||21||||12121=⇒=+-a a a (6)211=a 211=-a 则t e e ea e a t x t j t j t j tj 3cos )(21)(333131πππππ=+=+=--- 故:03,1===C B A π。
推荐-信号与系统第三版第三章课后答案 2 精品
流及 cosnt分量
当该周期函数为奇函数时,a0=an=0,展开式只
会含 sin nt分量
3.2.2 指数形式傅立叶级数分解
1.复指数函数集
fT t
e jnt n 0, 1, 2...
T 2
该函数集在(t0,t0+T)上为周期信号的完备正交函数集。
2.正交展开: 将任一周期信号展开为
fT (t) ci gi (t) Fne jnt
Fn
t0 T t0
fT (t)gi*(t)dt
t0 T t0
gi (t) 2 dt
t0 T t0
fT (t)e jntdt
t0 T
e jnt
2
dt
1 T
t0
n
t0 T t0
fT (t)e jntdt
一矢量V都可表示为V1和V2的线性组合 (如上图)。即:
V=C1V1+C2 V2。式中V1、V2为单位矢量,且V1·V2=0。其
中:
c1V 1
V
c
os
1,
c 1
V
c os 1
V1
V V1 V 1 V 1
cV 2
2
V
c
os
2,
c 2
V
cos 2
V2
V V 2 V 2 V 2
同样,对于一个三维的空间矢量,要精
确地表示它,就必须用一个三维的正交
矢量集。如左图,三维矢量空间可精确
地表示为:V=c1V1+c2V2+c3V3
推广到n维空间,则有
其中,Ci = V·Vi/Vi ·Vi
V c1V 1 c2V 2 cnVn
XTJ3第三章习题解答.docx
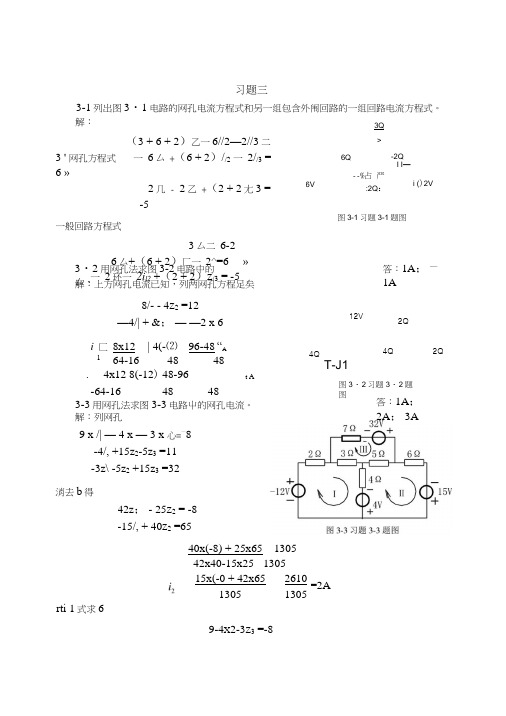
习题三3-1列岀图3・1电路的网孔电流方程式和另一组包含外闱回路的一组回路电流方程式。
解:(3 + 6 + 2)乙一6//2—2//3二3 ' 网孔方程式一6厶 +(6 + 2)//2一2//3 = 6 »_ 2几 - 2乙 +(2 + 2尢3 =-5一般回路方程式3厶二6-2_ 6厶+(6 + 2)匚一2^=6 »一2环一2i l2 +(2 + 2)Z/3 = -53Q>6V6Q-2QI I—--%占严:2Q:图3-1习题3-1题图i ()2V3・2用网孔法求图3-2电路中的厶、答:1A;—1A解:上方网孔电流已知,列两网孔方程足矣8/- - 4Z2 =12—4/| + &;——2 x 6i匚8x12 | 4(-⑵ _96-48“A164-16 48 48. 4x12 8(-12) 48-96 t A -64-16 48 483-3用网孔法求图3-3电路屮的网孔电流。
4Q12V2Q4Q2Q解:列网孔9 x /| — 4 x — 3 x 心=—8-4/, +15z2-5z3 =11-3z\ -5z2 +15z3 =32消去b得42z; - 25Z2 = -8-15/, + 40Z2 =65 rti 1式求6 T-J1图3・2习题3・2题图答:1A;2A; 3A40x(-8) + 25x65 _ 1305 42x40-15x25 _ 1305 _15x(-0 + 42x651305 2610 1305=2A9-4X2-3Z3 =-83・6在图3・6电路中,已知/=3V, /?,用回路法求各支路电流及各电源功率。
答:A= -1A, Z 2= 1A, 解:(尺 + /?2 + 尺4 )A + R 」3=U$ RJi +(R3 + R4Y3 — 3"1 = 0 i“=Us -R 占代入数据得9z\ + 6Z 3 = 3 9z, + 9Z 3 = 9=IQ, R 2 — 2Q R? = 3Q , /?4 = 6Q ,试I3= 2A, P$=3W (吸收);P 〃$=—24W (发出)。
(整理)光纤通信课后第3章习题答案.
第3章 复习思考题参考答案3-1 连接器和跳线的作用是什么?接头的作用又是什么答:连接器是把两个光纤端面结合在一起,以实现光纤与光纤之间可拆卸(活动)连接的器件。
跳线用于终端设备和光缆线路及各种光无源器件之间的互连,以构成光纤传输系统。
接头是把两个光纤端面结合在一起,以实现光纤与光纤之间的永久性(固定)连接。
接头用于相邻两根光缆(纤)之间的连接,以形成长距离光缆线路。
3-2 耦合器的作用是什么?它有哪几种耦合器的功能是把一个或多个光输入分配给多个或一个光输出。
耦合器有T 形耦合器、星形耦合器、方向耦合器和波分耦合器。
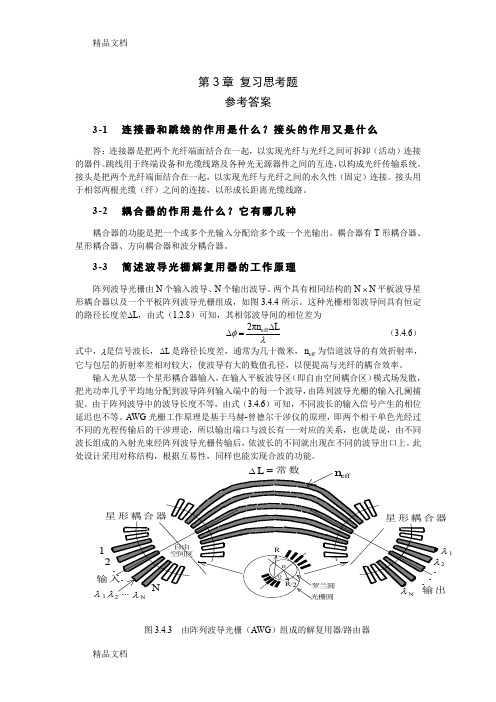
3-3 简述波导光栅解复用器的工作原理阵列波导光栅由N 个输入波导、N 个输出波导、两个具有相同结构的N ⨯ N 平板波导星形耦合器以及一个平板阵列波导光栅组成,如图3.4.4所示。
这种光栅相邻波导间具有恒定的路径长度差∆L ,由式(1.2.8)可知,其相邻波导间的相位差为λφLn ∆=∆eff π2 (3.4.6)式中,λ是信号波长,∆L 是路径长度差,通常为几十微米,eff n 为信道波导的有效折射率,它与包层的折射率差相对较大,使波导有大的数值孔径,以便提高与光纤的耦合效率。
输入光从第一个星形耦合器输入,在输入平板波导区(即自由空间耦合区)模式场发散,把光功率几乎平均地分配到波导阵列输入端中的每一个波导,由阵列波导光栅的输入孔阑捕捉。
由于阵列波导中的波导长度不等,由式(3.4.6)可知,不同波长的输入信号产生的相位延迟也不等。
AWG 光栅工作原理是基于马赫-曾德尔干涉仪的原理,即两个相干单色光经过不同的光程传输后的干涉理论,所以输出端口与波长有一一对应的关系,也就是说,由不同波长组成的入射光束经阵列波导光栅传输后,依波长的不同就出现在不同的波导出口上。
此处设计采用对称结构,根据互易性,同样也能实现合波的功能。
输1λ1λ12图3.4.3 由阵列波导光栅(AWG )组成的解复用器/路由器3.4 简述介质薄膜干涉滤波器解复用器的作用(见原荣编著《光纤通信(第2版)》3.4.3节)答:介质薄膜光滤波器解复用器利用光的干涉效应选择波长。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
焊接连接参考答案一、概念题3.1 从功能上分类,连接有哪几种基本类型3.2 焊缝有两种基本类型—对接坡口焊缝和贴角焊缝,二者在施工、受力、适用范围上各有哪些特点3.3 对接接头连接需使用对接焊缝,角接接头连接需采用角焊缝,这么说对吗 3.4 h f 和lw 相同时,吊车梁上的焊缝采用正面角焊缝比采用侧面角焊缝承载力高 3.5 为何对角焊缝焊脚尺寸有最大和最小取值的限制对侧面角焊缝的长度有何要求为什么 【答】(1)最小焊脚尺寸:角焊缝的焊脚尺寸不能过小,否则焊接时产生的热量较小,致使施焊时冷却速度过快,导致母材开裂。
《规范》规定:h f ≥2t ,式中: t 2——较厚焊件厚度,单位为mm 。
计算时,焊脚尺寸取整数。
自动焊熔深较大,所取最小焊脚尺寸可减小1mm ;T 形连接的单面角焊缝,应增加1mm ;当焊件厚度小于或等于4mm 时,则取与焊件厚度相同。
(2)最大焊脚尺寸:为了避免焊缝区的主体金属“过热”,减小焊件的焊接残余应力和残余变形,角焊缝的焊脚尺寸应满足 12.1t h f 式中: t 1——较薄焊件的厚度,单位为mm 。
(3)侧面角焊缝的最大计算长度侧面角焊缝在弹性阶段沿长度方向受力不均匀,两端大而中间小,可能首先在焊缝的两端破坏,故规定侧面角焊缝的计算长度l w ≤60h f 。
若内力沿侧面角焊缝全长分布,例如焊接梁翼缘与腹板的连接焊缝,可不受上述限制。
3.6 简述焊接残余应力产生的实质,其最大分布特点是什么 3.7 画出焊接H 形截面和焊接箱形截面的焊接残余应力分布图。
3.8 贴角焊缝中,何为端焊缝何为侧焊缝二者破坏截面上的应力性质有何区别3.9 规范规定:侧焊缝的计算长度不得大于焊脚尺寸的某个倍数,原因何在规范同时有焊缝最小尺寸的规定,原因何在规范禁止3条相互垂直的焊缝相交,为什么。
举3~5例说明焊接设计中减小应力集中的构造措施。
简述连接设计中等强度法和内力法的含义。
对接焊接时为什么采用引弧板不用引弧板时如何考虑在哪些情况下不需计算对接焊缝试判断下图所示牛腿对接焊缝的最危险点焊缝质量检验是如何分级的【答】《钢结构工程施工质量验收规范》规定焊缝按其检验方法和质量要求分为一级、二级和三级。
三级焊缝只要求对全部焊缝作外观检查且符合三级质量标准;一级、二级焊缝则除外观检查外,还要求一定数量的超声波检验并符合相应级别的质量标准。
焊缝质量的外观检验检查外观缺陷和几何尺寸,内部无损检验检查内部缺陷。
二、计算题2.1 已知两块等厚不等宽的钢板用焊透的对接焊缝连接,焊接中采用引弧板。
钢板材料为Q345钢。
焊缝承受变化轴力作用(标准值),Nmax=+1600KN, Nmin=+240KN, 试:分别按《桥规》和《钢规》对于对接焊缝进行强度验算。
循环次数按2x 106 ,焊缝等级为一级。
【解】由于对接焊缝承受变化轴力作用,必须先确定其疲劳容许应力,然后进行强度验算。
(一)按钢规验算(1)疲劳验算:该焊缝为2类,容许应力幅为:[]βσ1⎪⎭⎫ ⎝⎛=∆n C[]MPa 1441021086141612=⎪⎭⎫⎝⎛⨯⨯=∆σ 2912024380mm h l A e f w =⨯==MPa MPa A N w 14412.149912010)2401600(3>=⨯-=∆=∆σ 不满足疲劳强度要求。
(2)静力强度验算MPa f MPa A N w t w 29522891203.11600max max =<=⨯==σ 焊缝强度满足要求(二)《桥规》(1)疲劳容许应力[σ0]。
验算构件为焊接,疲劳应力为拉-拉构件 应力循环特征系数ρ的计算:115.0/1600/240max min -≥=++==AAσσρ 最大应力为拉应力,连接属类,相应容许应力为II 类,Mpa 7.121][0=σ 疲劳验算公式][)(0min max σσσt n d r r r ≤-1=d r ,1=n r ,1=t r (此三项系数均为假定的一种情况,实际按规范表查) .7.121][142)(0min max Mpa r Mpa t =>=-=∆σσσσ按桥规不满足疲劳强度要求。
2.2验算如图所示三块钢板焊成的工字型截面梁的对接焊缝强度。
尺寸如图,截面上作用的轴心拉力设计值N=250kN ,弯矩设计值M=,剪力设计值V=200kN ,钢材为Q345,手工焊,焊条为E50型,施焊时采用引弧板,三级质量标准。
(f t w=265N/mm 2, f c w=310N/mm 2, f v w=180N/mm 2)【解】240008200121002mm A =⨯+⨯⨯= 47231023.3)6100(1210022008121mm I x ⨯=+⨯⨯⨯+⨯⨯=351088.22/mm h I W x x ⨯==3112720010612100mm S w =⨯⨯=3167200508100127200mm S w =⨯⨯+=256/9.1381088.21040mm N W M M=⨯⨯==σ23/5.62400010250mm N A N N=⨯==σ22max /265/6.4.2015.629.138mm N f mm N w t =<=+=σ2273max /180/4.12981023.316720010200mm N f mm N t I VS w v w x w =<=⨯⨯⨯⨯==τ201/5.1865.622242009.138mm N h h N M=+⨯=+=σσσ27311/5.9881023.312720010200mm N t I VS w x w =⨯⨯⨯⨯==τ22222121/5.2911.1/7.1835.9835.1863mm N f mm N w t =<=⨯+=+τσ2.3 图中I32a 牛腿用对接焊缝与柱连接。
钢材为Q235,焊条用E43型,手工焊,用II 级焊缝的检验质量标准。
已知:I32a 的截面面积A=67.05cm 2;抵抗矩W x =692.2cm 2;腹板截面面积A W =25.4cm 2。
I x : S x = , t w =9.5mm 。
试按照《钢规》和《桥规》(焊缝为一级)分别求F 的最大值。
【解】对接焊缝所承受的内力为:F F N 2245cos 0=⨯=;F F N 2245sin 0=⨯=F V M 21020=⋅=1、钢规MPa f w t 215=;MPa f wv 125=对接焊缝A 点处弯曲应力最大,由wt w w w f W M A N ≤+=σ 得,5.212.69221005.672/2≤+F F ;F=694KN中和轴处剪应力最大,wv w w w f t I S V ≤⋅=τ 得 5.1295.05.272/2≤⨯F F=根据翼缘和腹板相交处折算应力应满足:wtf 1.132121≤+τσ得3202901⨯+=σσw A N F F F 02906.03202902.69221005.672/2=⨯+,S W ’=34.297)5.7160(15130cm =-⨯⨯F F t I S V w w w 02.095.0110764.2972/2'=⨯⨯=⋅=τ()5.211.1)02.0(302906.022⨯≤+∴F F得F=527KN 按钢规F 的最大值为。
【按照桥规做为选作题】1、桥规[]MPa w145=ο []MPa w85=τ对接焊缝A 点处弯曲应力最大,由[]w ww w W M A N σσ≤+=得,5.142.69221005.672/2≤+F F ; F=468KN中和轴处剪应力最大,[]W w ww tI S V ττ≤⋅=得 5.895.05.272/2≤⨯FF=314KN根据翼缘和腹板相交处折算应力应满足:[]w στσ1.132121≤+得3202901⨯+=σσw A N F F F 02906.03202902.69221005.672/2=⨯+,S W ’=34.297)5.7160(15130cm =-⨯⨯F F t I S V w w w 02.095.0110764.2972/2'=⨯⨯=⋅=τ ()5.141.1)02.0(302906.022⨯≤+∴F F得F=按桥规F 的最大值为314KN 。
2.4已知500mm ×12mm 钢板,钢材:Q235,E43焊条,手工焊,未使用引弧板,焊缝质量为III 级,钢板承受轴心拉力kN N 1250=。
设计:用双拼接板和围焊角焊缝的拼接,试求所需拼接板尺寸和焊脚尺寸f h 。
角焊缝强度设计值:W f f =160Mpa 。
W f 160f MPa=【解】1)设计拼接板拼接板宽为450mm ;(连接的强度不小于被连接构件的强度)。
按等强度设计原则,拼接板截面≥基材截面,取8mm 。
拼接板面积2×8×(500-2x25)=7200mm>12×500=6000mm 2。
2) 焊脚尺寸对手工焊,焊脚2.5125.15.1m ax ==≥t h f mm ,mm t h f 6.982.12.1min =⨯=≤, 取6mm 。
3)侧焊缝计算 连接需要传递的内力3006000j ⨯==f A N=1800000N端焊缝可传递内力w f f l h N W1e 122.12⨯= =××6×450×160=738Kn 侧焊缝需传递内力=2N 1N N -=512KN 则:Wff 2W1e 7.04f h N l ⋅≥=512/(4××160)=190.5mm<60f h =360mmmm h l f w 48688max =⨯== 符合规范规定实际侧焊缝长度511+=e W W l l =195.5mm ,取为200mm 。
2.5 图(尺寸单位:mm)所示钢板牛腿用四条贴角焊缝连接在钢柱上(无引弧板)。
钢材为Q235,焊条E43型。
焊角尺寸h f =10mm ,角焊缝强度设计值为 试确定最大承载力P 。
【解】W A =4××200=5600mm 2;W W =4××2002/6=186666.7mm 3;100V P M P e P =⋅=,=; ==W Vy/A V τP /5600W Mfx /W M =σ=100P /=P /因=+2V y 2Mfx)()1.22(τσ22511()()47.4101.221866.75600P P -+=⨯⨯ ≤=W f f 160Mpa所以 ≤P 105×160/=2.6 一雨棚拉杆受力如图所示,通过钢板和预埋件用角焊缝连接,需要进行角焊缝连接的验算,已知焊缝承受的静态斜向力为N =200kN(设计值),角度45=α,角焊缝的焊脚尺寸h f=10mm, 焊缝计算长度lw=300mm ,钢材为Q235-B,手工焊,焊条为E43型。