仿生六足机器人中期报告
六轴机器人仿真实习报告

一、实习背景随着科技的飞速发展,机器人技术已经广泛应用于工业、医疗、科研等领域。
为了提高我国在机器人领域的竞争力,培养具备机器人仿真实习能力的人才,我选择了六轴机器人仿真实习作为我的实习课题。
二、实习目的通过本次实习,我旨在:1. 了解六轴机器人的基本结构、工作原理及运动学参数;2. 掌握六轴机器人仿真软件的使用方法,如RobotStudio等;3. 熟悉机器人编程语言,如C#等;4. 培养实际操作能力和团队协作精神。
三、实习内容1. 六轴机器人基本结构及工作原理六轴机器人是一种多自由度关节型机器人,由基座、大臂、小臂、腕部、手腕和末端执行器等部分组成。
其工作原理是通过关节转动,使末端执行器在三维空间内实现精确的运动。
2. 六轴机器人仿真软件的使用在本次实习中,我主要使用了RobotStudio软件进行六轴机器人仿真。
RobotStudio是一款由ABB公司开发的机器人仿真软件,具有以下特点:(1)强大的仿真功能:可以模拟机器人的运动轨迹、碰撞检测、运动学分析等;(2)丰富的工具库:提供多种工具,如机器人编程、机器人仿真、机器人离线编程等;(3)用户友好的界面:操作简单,易于上手。
3. 机器人编程语言在本次实习中,我学习了C#语言,用于编写六轴机器人的控制程序。
C#语言是一种面向对象的编程语言,具有易学易用、功能强大等特点。
4. 实际操作能力培养在实习过程中,我通过实际操作,掌握了以下技能:(1)机器人硬件组装与调试;(2)机器人编程与调试;(3)机器人运动轨迹规划与仿真;(4)机器人与外部设备通信。
四、实习成果1. 成功组装了一台六轴机器人模型,并进行了调试;2. 使用C#语言编写了机器人控制程序,实现了机器人的基本运动;3. 利用RobotStudio软件对机器人进行了仿真,验证了控制程序的正确性;4. 参与了团队项目,培养了团队协作精神。
五、实习体会1. 通过本次实习,我对六轴机器人的基本结构、工作原理及运动学参数有了更深入的了解;2. 掌握了RobotStudio软件的使用方法,提高了自己的实际操作能力;3. 学习了C#语言,为今后从事机器人相关领域的工作打下了基础;4. 培养了团队协作精神,提高了自己的沟通能力。
一种六足仿生机器人的研究
第1期(总第146期)2008年2月机械工程与自动化M ECHAN I CAL EN G I N EER I N G & AU TOM A T I ON N o 11Feb 1文章编号:167226413(2008)0120139203一种六足仿生机器人的研究申景金,李成刚(南京航空航天大学机电学院,江苏 南京 210016)摘要:基于仿生学原理,应用连杆机构学中的Robert 原理,设计出一连杆轨迹能较好地近似于机器人理想足部轨迹的六杆机构。
并通过ADAM S 动力学仿真软件,对用这一连杆机构作为腿部机构的六足机器人进行了前进和转弯步态仿真。
仿真结果表明该机器人具有良好的移动性能。
关键词:Robert 原理;六连杆机构;六足机器人;步态中图分类号:T P 242 文献标识码:A收稿日期:2007205215;修回日期:2007209221作者简介:申景金(19842),男,山东人,硕士研究生,研究方向为智能机器人技术。
0 引言轮子或履带移动方式在移动机器人中已经普遍应用,但这种移动方式适应地形的能力较差,因此根据仿生学原理设计出一种具有较好适应性的移动方式已成为机器人研究的一个重要部分。
采用足作为移动系统的机器人和采用其它方式作为移动系统的机器人相比,具有以下优点:①可以穿过不规整的地形而保持机体水平,从而不破坏其稳定性;②具有跨越障碍物、壕沟和楼梯的移动能力;③能够穿过松软的地形;④具有全方位移动性;⑤相比轮子、履带移动机器人能较多地避免外部环境的破坏作用[1]。
可见,足式步行机器人已成为机器人研究中的一个热点。
本文根据仿生学原理,以六足机器人的足部轨迹为出发点,设计出一种能够较好符合其要求的腿部机构,并通过ADAM S 动力学仿真软件进行了分析与验证。
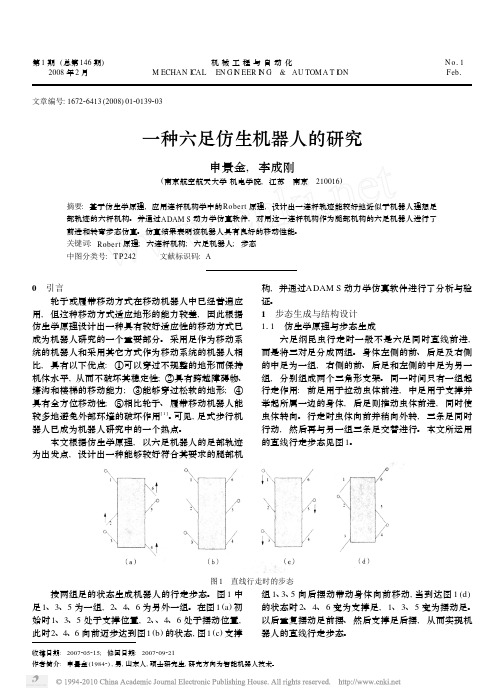
1 步态生成与结构设计111 仿生学原理与步态生成六足纲昆虫行走时一般不是六足同时直线前进,而是将三对足分成两组。
身体左侧的前、后足及右侧的中足为一组,右侧的前、后足和左侧的中足为另一组,分别组成两个三角形支架。
仿生机器人报告
仿⽣机器⼈报告H a r b i n I n s t i t u t e o f T e c h n o l o g y仿⽣感知与先进机器⼈技术课程报告(1)报告题⽬:仿⽣机器⼈课程报告院系:机电学院班级:姓名:学号:哈尔滨⼯业⼤学机电⼯程学院摘要:仿⽣学是模仿⽣物系统的原理以建造技术系统,或者使⼈造技术系统具有⽣物系统特征或类似特征的科学,它是在上世纪中期才出现的⼀门新的边缘科学。
关键词:仿⽣;仿⽣机械;仿⼈机器⼈1.仿⽣学仿⽣学是模仿⽣物系统的原理以建造技术系统,或者使⼈造技术系统具有⽣物系统特征或类似特征的科学,它是在上世纪中期才出现的⼀门新的边缘科学。
仿⽣学的研究对象是研究⽣命的结构、能量转换和信息流动的过程,并利⽤电⼦、机械技术对这些过程进⾏模拟,从⽽改善现有的和创造出崭新的现代技术装置。
从仿⽣学的诞⽣、发展,到现在短短⼏⼗年的时间内,它的研究成果已经⾮常可观。
仿⽣学的问世开辟了独特的技术发展道路,也就是向⽣物界索取蓝图的道路,它⼤⼤开阔了⼈们的眼界,显⽰了极强的⽣命⼒。
.2.仿⽣机器⼈基本概念及其分类仿⽣机器⼈是指模仿⾃然界中⽣物的外部形状、运动原理或⾏为⽅式的系统,并且能从事⽣物特点⼯作的机器⼈。
仿⽣机器⼈的研究是以机器⼈技术和仿⽣学的发展为基础,它的产⽣和存在的前提条件在于⽣物是经过了长期的⾃然选择进化⽽来的,在结构、功能执⾏、环境适应、信息处理、⾃主学习等诸多⽅⾯具有⾼度的合理性和科学性。
⼈类通过研究、学习、模仿来复制和再造某些⽣物特性和功能,制造出能够代替⼈类从事恶劣环境下⼯作的仿⽣机器⼈,从⽽极⼤地提⾼⼈类对⾃然的适应和改造能⼒,产⽣巨⼤的社会经济效益。
仿⽣机器⼈作为机器⼈技术领域中的⼀个新兴的发展分⽀,是众多专家和学者的研究热点。
对于仿⽣机器⼈的研究是多⽅⾯的,因此出现了功能、形状各异以及⼯作原理不同的仿⽣机器⼈,种类繁多。
分类⽅法也不尽相同,按照仿⽣机器⼈模仿特性可划分为仿⼈类肢体和仿⾮⼈⽣物两⼤类;按照仿⽣机器⼈模仿的运动机理、感知机理、控制机理及能量代谢和材料组成的进⾏划分;按照仿⽣机器⼈的空间⼯作环境的不同⼜可划分空中仿⽣机器⼈、陆地仿⽣机器⼈和⽔下仿⽣机器⼈等。
毕业设计文献综述六足步行机器人

燕山大学本科毕业设计(论文)文献综述课题名称:学院(系):年级专业:学生姓名:指导教师:完成日期:一、课题国内外现状步行机器人,简称步行机 ,是一种智能型机器人 , 它是涉及到生物科学 , 仿生学 , 机构学 , 传感技术及信息处理技术等的一门综合性高科技 . 在崎岖路面上 ,步行车辆优于轮式或履带式车辆 .腿式系统有很大的优越以及较好的机动性 , 崎岖路面上乘坐的舒适性 ,对地形的适应能力强 .所以 ,这类机器人在军事运输 , 海底探测 , 矿山开采 , 星球探测 , 残疾人的轮椅 , 教育及娱乐等众多行业 ,有非常广阔的应用前景 , 多足步行机器人技术一直是国内外机器人领域的研究热点之一。
步行机器人历经百年的发展, 取得了长足的进步, 归纳起来主要经历以下几个阶段[5]:第一阶段, 以机械和液压控制实现运动的机器人。
第二阶段, 以电子计算机技术控制的机器人。
第三阶段, 多功能性和自主性的要求使得机器人技术进入新的发展阶段。
闰尚彬,韩宝玲,罗庆生针对仿生六足步行机器人关节较多,其步态轨迹规划和关节控制量计算都较为复杂的现状,采用Solidworks软件与MSC.ADAMS 软件相结合的方式对六足仿生步行机器人的样机模型进行了运动学仿真与分析.通过仿真,验证了所设计的三角步态的适用性和所选择的三次样条曲线作为机器人足端点轨迹曲线方案的可行性.韩宝玲王秋丽罗庆生基于六足仿生步行机器人机构学特性的研究,采用数值分析法求解了机器人步行足的足端工作空间,利用虚拟样机技术计算了机器人的灵活度,从两方面综合衡量六足仿生步行机器人的工作能力,并以六足步行机器人各腿节比例关系的确定为例,介绍了六足步行机器人结构优化的具体方案.苏军陈学东田文罡研究六足步行机器人全方位行走步态,分析其静态稳定性;规划了典型直线行走步态和定点转弯步态,确定了直线行走步态最大跨步和定点转弯步态最大转角;进行了步态控制算法模拟仿真及实地步行实验。
视觉仿生六足机器人设计报告
视觉仿生六足机器人设计报告视觉仿生六足机器人设计报告摘要以六足机器人结构套件为基础,搭建移动测控平台,包括设计总体方案和各个模块实现方案,设计和制作伺服电机(即舵机)主控制板和传感器电路板,设计机器人行走方案并编程实现,实现超声波避障。
采用细化的八步行走算法来实现行走控制,采用轴向舵机序号确定其他舵机运动方式和次序的方法进行行走方向的控制,这样完成了对18 个舵机的控制任务,使得机器人能够比较协调、流畅地行走,并且可以控制其任意的行进方向。
主控制板能够基本满足需要,但还需进一步改善其稳定性和可靠性,并增加功能组件如引导程序下载接口以及键盘等交互器件。
进一步研究指南针和超声波模块在移动测控平台上有效利用,并开发图像处理及远程信息传输等技术,使六足野外机器人测控平台有更广阔的应用空间。
可应用于户外环境参数监测、特殊任务执行、家庭助理等领域。
关键词:舵机STM32 单片机行走算法超声波传感器视频采集目录目录绪论绪论1 1 第一章第一章机械结构改装及设计机械结构改装及设计2 2 1.1原机械基础上的改装.2 1.2设计加工的机械部分.2 第二章第二章电路板设计、制作与调试电路板设计、制作与调试4 4 2.1总体设计.4 2.2主板设计.5 2.3传感器板设计.7 2.4电机稳压电路设计12 2.5安装调试过程中的问题及解决14 第三章第三章行走算法及程序细节行走算法及程序细节1 17 7 3.1编号、建表17 3.2行走动作算法及动作细化18 3.3PPM 产生程序及其他.22 第四章第四章传感器的使用传感器的使用 2 29 9 4.1 超声波传感器的试验.29 4.2系统流程30 第五章第五章摄像头采集及无线遥控摄像头采集及无线遥控3131 5.1 摄像头选型,及系统合.31 5.2 无线遥控模块方案31 第六章第六章总结总结3 33 3 6.1 六足机器人未来改进方向33 6.1六足机器人应用前景探讨33 参考文献参考文献3 35 5 1 绪论绪论搭建六足野外机器人测控平台----这就是本人毕设的工作要求。
六足仿生机器人实验室开放项目结项报告

EA/VPP:当/EA保持低电平时,则在此期间为外部程序存储器(0000H-FFFFH),不管是否有内部程序存储器读取外部ROM数据。注意加密方式1时,/EA将内部锁定为RESET;当/EA端保持高电平时,单片机读取内部程序存储器。(扩展有外部ROM时读取完内部ROM后自动读取外部ROM)。在FLASH编程期间,此引脚也用于施加12V编程电源(VPP)。
XTAL1:反向振荡放大器的输入及内部时钟工作电路的输入。
XTAL2:来自反向振荡器的输出。
3.2
开关三极管电路利用三极管工作于截止区和饱和区,相当于电路的切断和导通的特性,被广泛应用于各种开关电路中,如常用的开关电源电路、驱动电路、高频振荡电路、模数转换电路、脉冲电路及输出电路等。本次设计用两个NPN型小功率三极管s8050构成三极管开关电路,能够有效地隔绝恒流源电路对单片机芯片的损害。
淮北师范大学实验室开放项目
总结报告
基于STC12C5A60S2单片机的六足机器人
学院:物理与电子信息学院
负责人:韩润
小组成员:史浩东史良东陆家双
张莹莹康强强
指导老师:方振国
一 、项目重述
1.1项目名称:智能六足机器人
1.2项目背景及意义:
背景:在社会迅速发展的今天,单片机的的运用已经渗透到我们生活的每个角落,也似乎很难找到哪个领域没有单片机的足迹。智能仪表、医疗器械,导弹的导航装置,智能监控、通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能IC卡,汽车的安全保障系统,动控制领域的机器人,数码像机、电视机、全自动洗衣机的控制,电话机以及程控玩具、电子宠物等等,这些都离不开单片机。
六轴机器人最新研究报告

六轴机器人最新研究报告
根据近期的研究报告,六轴机器人在工业和服务领域的应用正不断增加。
以下是一些最新的研究发现:
1. 姿态控制:研究人员提出了一种新的姿态控制方法,利用六轴机器人的传感器数据和先进的控制算法,实现更精确和稳定的姿态控制。
这项研究对于机器人在高精度操作和灵活性要求较高的任务中的应用具有重要意义。
2. 动力学建模:研究人员开发了一种新的动力学模型,通过对六轴机器人的力学特性进行建模,能够更准确地预测其运动和力学响应。
这对于设计更高性能和更智能的控制算法具有重要意义。
3. 协同控制:研究人员提出了一种新的协同控制方法,通过六轴机器人之间的通信和协作,实现更高效和灵活的工作。
这种方法在装配线等任务中能够显著提高生产效率和工作质量。
4. 自主学习:研究人员利用机器学习技术,开发了一种自主学习算法,使六轴机器人能够通过自我试错和经验积累的方式,不断改进其控制策略和任务执行能力。
这项研究对于实现真正智能化的机器人具有重要意义。
5. 应用领域扩展:除了传统的工业应用,六轴机器人在医疗、农业、教育和家庭服务等领域的应用也在不断扩大。
例如,在医疗领域,六轴机器人被用于手术操作和康复治疗等任务中,能够提高手术准确性和康复效果。
总体而言,六轴机器人的研究重点在于提高其控制精度、灵活性和智能化水平,以适应不断变化和复杂的任务需求。
未来,随着技术的进一步发展,六轴机器人有望在更广泛的领域发挥重要作用。
仿生六足机器人

创新实验项目典型案例1创新实验(作品)名仿生六足机器人创新实验(作品)简介(系统功能及技术路线):(一)项目介绍远古时代,人们就发明了轮子作为移动机械和地面相互作用的运动体。
轮子的发明不仅造福于我们的祖先,而且在推动现代工业的发展中也发挥着不可估量的作用。
尽管如此,由于轮子本身的弱点,必须在地面平坦、土质较硬及摩擦大的地面上移动。
对于地形复杂、土质松软的环境,轮子的移动就显示出很大的不足。
因此,应用仿生学原理,模拟生物的运动形式,就成为机器人领域研究的热点之一。
随着机器人在现代化各个行业中的广泛应用,社会对机器人的要求不断提高。
由于机器人应用范围的不断扩展,一些特殊工作环境对于机器人提出了特殊的要求,但在任何环境下作业的机器人要完成特定的任务,都需要解决工作装置的载体即机器人系统的研制,包括特殊环境下机器人的移动方式、有效控制和路径规划等方面的问题,其中移动方式的研究是基础。
步行是人类及有腿动物所具有的独特的运动方式,也是自然界中最为灵活的移动方式,步行机是以模拟这种方式来实现自身运动的一类特殊的机器人。
随着机器人技术的不断发展及其在各个领域的广泛应用,各类不同功能的机器人研制就具有很大的现实意义。
目前,美国研制出的ODEX I-IV型六足机,能自如通过狭窄门洞、转弯、上下楼梯、避障等,腿结构为改进的缩放式,用于核电站的维修工作。
(二)研究目标、主要问题1、步行机行走机构选型及综合设计本设计中,已知步行机足端运动轨迹,要求综合设计出一种行走机构,属于机构轨迹综合问题。
首先要进行机构选型,然后选取理想轨迹上的某些点作为精确点,列写方程组,综合求解出机构结构参数。
2. 步行机整体结构设计设计出步行机的行走机构之后,综合考虑步行机行走时的静态、动态稳定步行,选择步行机的腿数。
步行机采用模块化设计,根据其期望功能,进行整体结构设计。
3. 借助Pro/Engineer软件进行步行机实体建模与仿真在产品设计的初级阶段,通过仿真可以大大提高设计的可靠性、缩短设计周期。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
编号:哈尔滨工业大学大一年度项目中期检查报告项目名称:仿生六足机器人项目负责人:学号联系电话:电子邮箱:院系及专业:机电工程学院指导教师:职称:联系电话:电子邮箱:院系及专业:机电工程学院哈尔滨工业大学基础学部制表填表日期:2014 年 6 月28 日一、项目团队成员(包括项目负责人、按顺序)二、指导教师意见三、项目专家组意见四、研究背景1.研究现状4.1国内研究现状随着电子技术发展,计算机性能的提高,使多足步行机器人技术进入了基于计算机控制的发展阶段。
其中有代表性的研究为1993年,美国卡内基-梅隆大学开发出有缆的八足步行机器人DANTE,图1所示,用于对南极的埃里伯斯火山进行了考察,其结构由2个独立的框架构成。
这一阶段研究的重点在于机器人的运动机构的设计、机器人的步态生成与规划及传统的控制方法在机器人行走运动控制过程的应用。
Boston Dynamics公司的Big Dog四足机器人用于为军队运输装备,其高3英尺,重165磅,可以以3.3英里的速度行进,其采用汽油动力。
图1 Adaptive Suspension Vehicle 图2 Odex1步行机器人图3 MIT腿部实验室的四足和双足机器人图4 DANTE步行机器人由于新的材料的发现、智能控制技术的发展、对步行机器人运动学、动力学高效建模方法的提出以及生物学知识的增长促使了步行机器人向模仿生物的方向发展。
4.2国外研究现状我国步行机器人的研究开始较晚,真正开始是在上世纪80年代初。
1980年,中国科学院长春光学精密机械研究所采用平行四边形和凸轮机构研制出一台八足螃蟹式步行机,主要用于海底探测作业,并做了越障、爬坡和通过沼泽地的试验。
1989年,北京航空航。
天大学孙汉旭博士进行了四足步行机的研究,试制成功一台四足步行机,并进行了步行实验;钱晋武博士对地、壁两用六足步行机器人进行了步态和运动学方面的研究。
1991年,上海交通大学马培荪等研制出JTUWM系列四足步行机器人,该机器人采用计算机模拟电路两级分布式控制系统,JTUWM-III以对角步态行走,脚底装有PVDF测力传感器,如图5,同时对多足步行机器人的运动规划与控制,以及机器人的腿、臂功能融合和模块化实现的控制体系及其设计进行了研究。
图5 JTUWM四足步行机器人2.研究趋势根据美国陆军1967年调查 ,地球上近一半的地面不能为传统的轮式车辆或履带车辆到达[1],而多足式动物却可以在这些地面上行走自如.从中得到启示:轮式车辆在平地运输中有不可替代的作用 ,履带车辆被广泛应用于沙地和泥泞 ,然而人们没能找到合适的方法用于山地和多障碍地面足式步进车辆就解决了这些问题 ,能跨越沟、坎等障碍,并且步进车辆足部落脚点的离散性和面积小的特点使其对坑洼山地的机动性和适应性更强,机器人能够在足尖点可达范围内灵活调整行走姿态并选择合理的支撑点,使得机器人具有更高的避障和越障能力[2],同时其运行足部也较轮式车辆和履带车辆更加轻便.以往各国学者对四足、六足八足步进机的研究中取得了丰硕的成果 ,但这些步进车大多局限于采用矩形框架分布六足 ,而使其自由度分布因足部干涉而受到限制 ,这不能不说是一种遗憾。
足式运输的优越性使其成为机器人学研究的一个引人注目的热点.它在航空航天(登月,火星探测)、工农业生产(西部大开发、物流自动化机械设备的探测和检修) ,军事国防等领域有广泛的应用前景。
3.研究意义它可以较易的跨过比较大的障碍,并且机器人足所具有的大量自由度可以是机器人的运动更加灵活,对凹凸不平的地形的适应能力更强。
能够代替人类完成单调重复的工作,有着更强的适应能力,在高气温、瘴气等恶劣环境下仍然能精准无误的完成任务。
五.项目研究内容及实施方案我们拟定躯干部分选用亚克力板,易于加工可设计拼接结构,不耐冲击。
躯干和足之间选用铆钉连接,连接强度较大,能够紧、密连接工件。
接触面积较大的地方选用胶接的方法,应用面广,不受基本结构限制。
主要驱动方式将选用驱动器采用微型直流角位移伺服电动机,也就是我们常说的舵机。
项目设计共使用12个舵机用于步态实现。
每条腿上有两个舵机,分别控制髋关节和膝关节的运动,舵机安装呈正交,构成垂直和水平方向的自由度。
由于腿只有水平和垂直平面的运动自由度,所以只考虑利用三角步态实现直线行走。
电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。
给舵机供电电源应能提供足够的功率。
控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20 ms(即频率为50 Hz)。
当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。
舵机内部是直流电机驱动,在带载时启停的瞬间会产生较大的峰值电流,将舵机供电电源与MCU 和IC的供电电源分开,双线供电能保证控制电路不受驱动电路产生不稳定脉冲的干扰。
为保证驱动器电源输入的稳定性,结合电路抗干扰技术,采用合适方法保证电路抗脉冲干扰、抗低频干扰、抗共模干扰的能力,使12个电机的多驱动系统能够稳定工作。
[3]电源采用,镍氢电池7.4V,1200mA,15CC。
单片机主控系统:AVR单片机A Tmega16软件设计的基本思想软件的主要功能是使机器人在向前行进的过程中能够避开障碍物,即对12 个舵机进行调度和控制。
可将软件功能分解为:要避开障碍物,首先应探测到障碍物,其次能绕开障碍物,这就要求机器人能完成前进、后退、左右转弯等动作。
动作协调完美性的实现,要求了在任一时刻能够做出12个舵机的同步动作控制。
软件设计中首先将前进、后退、左右转弯等高层动作分解,具体到完成一个动作各个舵机所要完成的动作和时序。
采用模块化的设计思想,将对所有舵机的调度做成一个独立的模块,所有的高层动作都是通过调用底层舵机控制的模块来完成。
多个舵机的控制是采用多舵机分时控制的思想来实现的。
接下来是机器人的运动方式,该机器人将采用三角步态来实现爬行。
如下图机器人开始运动时,六条腿先同时着地,然后2、4、6三条腿抬起进行向前摆动的姿态准备,另外三条腿1、3、5处于支撑状态,支撑起机器人本体以确保机器人的重心位置始终处于三条支腿所构成的三角形内,使机器人处于稳定状态而不至于摔倒,摆动腿2、4、6抬起向前跨步(如图2.1(b)所示),支撑腿1、3、5一面支撑机器人本体,一面在动力的作用下驱动机器人机体向前运动半步长s(如图2.1(c)所示)。
在机器人机体移动结束后,摆动腿2、4、6立即放下,呈支撑态,使机器人的重心位置处于2、4、6三腿支撑所构成的三角形稳定区内,同时原来的支撑腿1、3、5经短暂停留后抬起并准备向前跨步(如图2.1(d)所示),当摆动腿1、3、5向前跨步时(如图2.1(e)所示),支撑腿2、4、6此时一面支撑机器人,一面驱动机器人本体,使机器人机体向前行进半步长s(如图2-1(f)所示),如此不断循环往复,以实现机器人的向前运动,由于设计速度并不是非常精确,所以其行进轨迹并不是一条笔直的直线。
爬行机器人的腿部结构是机器人运动活动最多的部位,也是主要的执行机构,机构型式的好坏,将直接影响到整个系统的整体性能。
多足爬行机器人的腿有多种形式。
常见的有缩放式、伸缩式及关节式等,不同的腿部结构形式又具有不同的特点。
为了满足六足爬行机器人腿功能的要求。
我选择关节式腿这样的结构形式,不仅可以承受较大的负载,而且可以减小运动空间,简化了结构。
六足机器人的六条腿对称分布在机器人机身两侧,每条腿由三段组成,各段之间由关节连接,当机器人站立在水平地面时,关节1的转轴垂直于地面,关节2和关节3的转轴平行于地面。
控制系统方面将采用如下框图六、进度情况6.1初步取得的成果底部采用半圆头,适应性强,较易地跨过比较大的障碍(如沟、坎等)。
股节装配体图由舵机通过一个四杆机构A2B2C2D2,带动股节D2G上下摆动,实现抬腿运动。
胫节装配体图由舵机通过四杆机构A1B1C1D1和D1E1F1G,带动胫节GH摆动,实现左右摇摆运动。
单足组装图第一个自由度,由舵机直接带动转节前后摆动,从而使整条腿前后摆动。
第二个自由度,由舵机通过一个四杆机构A2B2C2D2,带动股节D2G上下摆动,第三个自由度,由舵机通过四杆机构A1B1C1D1和D1E1F1G,带动胫节GH摆动,实现左右摇摆运动。
机器人腿部完整的机构简图如图6所示。
三个自由度的原动件分别为轴OO1、杆A2B2和杆A1B1,它们都是由舵机直接驱动。
图6 舵机三维图由单片机控制舵机旋转,然后再由舵机控制每个自由度的运动轨迹。
图7 固定架图用于连接躯体和腿部,由于结构的复杂性,因此多处需要焊接来实现。
用于连接腿部机构,并安装单片机以实现六足行走机器人的智能化。
图八三维组装图6.2当前遇到的困难大二下学期专业课消耗时间较多,因复习备考的需要,不得不缩减科创上的时间;而有关科创上,单片机的学习、程序的学习和编程等都需要我们从零点开始,一步步客服无知而完成预定目标,这从客观上限制了我们的进度进展。
6.3下一步工作计划单片机程序编译工作,制作出和三维模型基本相符的样本进行调试与优化,并准备好结题答辩。
七、结题预期目标进行运动学仿真,查看运动合理性;进行受力分析,验证结构强度、刚度修改并敲定最后的尺寸,开始编程工作。
根据确定的方案,进行功能模块软件开发;按照所敲定的尺寸购买零件,开始组装。
导入程序并对整体进行最后的调试与修改,制作机械部件、硬件电路和调试。
软硬件整体组装、调试、优化,并制作出最终样本。
撰写结题报告并准备结题答辩。
八、小组分工闫振,赵京昊:负责六足机器人的三维建模,进行合理的力学结构分析,确定相关尺寸并查阅相关三维建模的书籍。
王志强晏理邦:负责单片机的编译,进行硬件软件的调试工作,最后进行机器人的步态和运动机构的合理调试。
穆思宇:负责零件,材料的购买,完成部件的尺寸切割和加工。
九、制作费用(单位:元)十、参考文献【1】雷静桃,高峰,崔莹.多足步行机器人的研究现状及展望[D].北京: 北京航空航天大学汽车工程系,200609.【2】曾桂英,刘少军.六足步行机器人的设计研究.中南大学机电工程学院, 长沙410083【3】王刚,孟庆鑫, 陈东良, 季宝锋, 刘德峰.一种新型多足仿生机器人步行足关节结构研究.哈尔滨工程大学机电工程学院, 哈尔滨150001【4】黄俊军,葛世荣,曹为.多足步行机器人研究状况及展望[D]. 江苏徐州:中国矿业大学可靠性与救灾机器人研究所, 221008.【5】陈学东.多足步行机器人运动规划与控制[M ].中科技大学出版社 , 2006121.11。