六足仿生机器人图纸
FISH 六足机器人课件-童红林
2.2 六足仿生机器人工作原理介绍
慧鱼步行机器人的腿部结构是按照“四连杆机 构”设计的。“四连杆机构”的结构类型被称为 曲柄摇杆结构。在曲柄的作用下,齿轮的活动部 分可前后摆动。要调整好单个构件和脚底构件的 距离,使得曲柄旋转时,模型的脚以椭圆的轨迹 摆动。这样所产生的运动就类似于行走了一步。
如图所示,电机1的转动通过齿轮机构, 把运动传递给蜗轮蜗杆,蜗轮我干机构再 把运动传递给相应的脚。这样,电机1可以 控制三只脚的运动,同理:电机2页控制三 只脚的运动。
2.3 机构分析
1.蜗轮蜗杆机构
蜗轮蜗杆机构是吧电动机的旋转运动转 换成机器人脚的行走运动,使机器人能够 平稳的运动。
2.齿轮机构
齿轮机构的作用是将电动机的 旋转运动传递给涡轮蜗杆机构, 并且进行一定的书读改变。
3.平面四杆机构
平面四杆机构是使机器人的脚有 规律的,平稳的运动。
2.4 机械控ROBOPRO软件介绍
1.1.2 “慧鱼”模型的概念
“慧鱼”模型是一个结构件的家族。由机械 构件、电气构件、传感器、气动构件、电脑控 制器及软件所组成的创新系统。使用计算机接 口及相关软件,模型也能用最流行的编程语言 进行控制。
模型设计采用模块式设计,可无限扩充;可反复拆 装;产品系统化,种类多;可逼真地表现机械构件及 科学原理;可编程控制的实现,便于对机电一体化流 程的全面认识。
软件
用电脑控制模型时,采用ROBOPRO 软件或高级语言如C、C++、VB等 编程。 ROBOPRO软件是一种图形编程 软件,简单易用,实时控制。 用PLC控制器控制模型时,采用梯形 图编程。
第二章 “慧鱼”六足仿生机器人
2.1 “慧鱼”六足放生机器人的作用
六足仿生机器人作为一 种体积小、行动灵活的新 型智能机器人,有可能在 不久的将来广泛应用于搜 索、救援、以及科学实验 和科学考察。
六足爬虫机器人设计
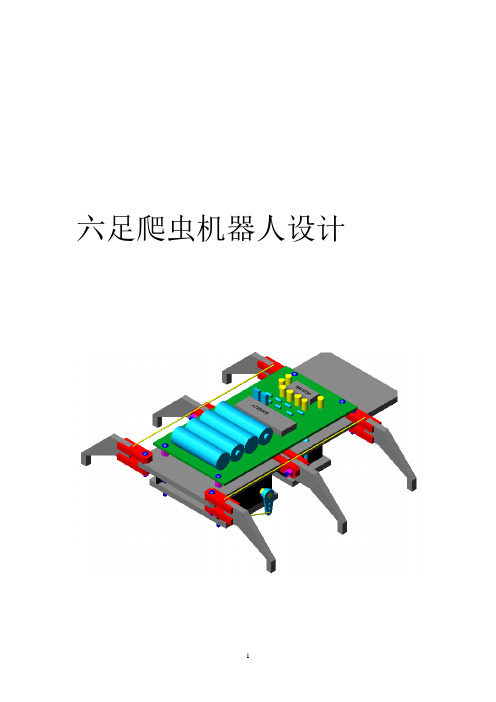
六足爬虫机器人设计设计人:李海鹰日期:2004年9月30日目录前言 (3)(一)、机器人的大脑 (3)(二)、机器人的眼睛耳朵 (4)(三)、机器人的腿——驱动器与驱动轮 (4)(四)、机器人的手臂——机械传动专制 (5)(五)、机器人的心脏——电池 (5)一、AT89S51单片机简介 (6)(一)、A T89S51主要功能列举如下: (6)(二)、A T89S51各引脚功能介绍: (6)二、控制系统电路图 (9)三、微型伺服马达原理与控制 (10)(一)、微型伺服马达内部结构 (10)(二)、微行伺服马达的工作原理 (10)(三)、伺服马达的控制 (11)(四)、选用的伺服马达 (11)四、红外遥控 (12)(一)、红外遥控系统 (12)(二)、遥控发射器及其编码 (12)(三)、红外接收模块 (13)(四)、红外解码程序设计 (14)五、控制程序 (14)六、六足爬虫机器人结构设计图 (21)前言今年年初,学校为参加中央电视台举办的第三届全国大学生机器人电视大赛,组建了机器人制作小组。
我积极参加,有幸成为了其中的一员。
因为我们以前没有参加过类似的比赛,也没有制作机器人的经验。
可以说我们什么都是从零开始,边学习边制作。
通过这半年多的制作过程,我从中学到了很多书本上学不到的东西,也得到了很好的学习与锻炼的机会。
最初,我们组建了机器人制作实验室。
到五金机电市场购买了必要的工具和一些制作材料。
然后开始制作实验机器人的身体——框架。
实验机器人的框架我们是使用轻型万能角钢制作的,这种角钢的两侧都有间隔均匀的孔槽,可以很方便的用螺栓进行连接。
用不同长度的角钢组合后,就可以得到不同大小的立方体和长方体及多边形。
机器人身体的框架就搭建好了。
在它的上面将装上:机器人的大脑——可编程控制器、机器人的眼睛耳朵——传感器、机器人的腿——驱动轮、机器人的手臂——机械传动专制、机器人的心脏——电池……之所以使用轻型万能角钢,主要是因为是在制作试验机型,而轻型万能角钢安装拆卸方便和便于修改长度,调整设计。
仿生六足机器人的结构设计及运动分析

仿生六足机器人的结构设计及运动分析一、结构设计1.机体结构:仿生六足机器人的机体结构通常采用轻型材料如碳纤维和铝合金制作,以保证机器人整体重量轻,同时具备足够的强度和刚度。
机体一般采用箱型结构,保证机器人整体稳定。
2.足部结构:仿生六足机器人的足部结构是其中最重要的部分,直接关系到机器人的运动能力和适应性。
足部结构通常由刚性材料制成,具有良好的强度和刚度。
每个足部通常由三个关节驱动,分别是髋关节、膝关节和脚踝关节。
这些关节的设计对机器人的运动能力和足部适应性有着重要影响。
3.关节驱动方式:仿生六足机器人的关节驱动方式通常采用电机驱动和传动装置。
电机驱动可以提供足部的力和扭矩,使机器人能够进行各种运动,传动装置则用来将电机的运动传递到足部关节。
可以采用齿轮传动、连杆传动、带传动等方式,根据实际需求进行合理选择。
二、运动分析1.步态规划:步态规划是确定六足机器人各个足部的步态序列,以实现机器人的稳定行走。
常用的步态有三角步态、扭摆步态和螳臂步态等。
步态规划需要考虑机器人的稳定性和适应性,结合地面情况和环境要求进行合理选择。
2.动力学模拟:动力学模拟是对仿生六足机器人的运动进行分析和仿真,以优化机器人的运动能力和稳定性。
通过建立六足机器人的运动学和动力学模型,可以预测机器人的运动轨迹、步态设计和稳定性评估等。
动力学模拟可以帮助改善机器人的设计和控制策略。
3.控制策略:仿生六足机器人的控制策略采用了分布式控制和自适应控制的方法。
分布式控制通过将机器人的控制任务分配给多个子控制器,使得机器人具备较好的容错性和适应性。
自适应控制方法则通过对机器人的运动进行实时监测和反馈调整,使机器人能够自主学习和适应不同环境和任务。
综上所述,仿生六足机器人的结构设计和运动分析是实现机器人稳定行走和适应环境的重要环节。
正确的结构设计和合理的运动分析可以有效提高机器人的运动能力和稳定性,从而使机器人在实际应用中具备良好的适应性和操作性能。
仿生六足机器人研究报告

项目研究报告北京理工大学机电学院 20081043 吴帆——小型仿生六足探测机器人一、课题背景:仿生运动模式的多足步行机器人具有优越的越障能力,它集仿生学原理、机构学理论、自动控制原理与技术、计算机软件开发技术、传感器检测技术和电机驱动技术于一体。
不论在何种地面上行走,仿生六足机器人的运动都具有灵活性与变化性,但其精确控制的难度很大,需要有良好的控制策略与精密的轨迹规划,这些都是很好的研究题材。
二、项目创新点:作为简单的关节型伺服机构,仿生六足机器人能够实现实时避障,合理规划行走路线。
简单的关节型机器人伺服系统不仅具有可批量制造的条件,作为今后机器人群系统的基本组成,也可以作为探索复杂伺服机构的研究对象。
三、研究内容:1.仿生学原理分析:仿生式六足机器人,顾名思义,六足机器人在我们理想架构中,我们借鉴了自然界昆虫的运动原理。
足是昆虫的运动器官。
昆虫有3对足,在前胸、中胸和后胸各有一对,我们相应地称为前足、中足和后足。
每个足由基节、转节、腿节、胫节、跗节和前跗节几部分组成。
基节是足最基部的一节,多粗短。
转节常与腿节紧密相连而不活动。
腿节是最长最粗的一节。
第四节叫胫节,一般比较细长,长着成排的刺。
第五节叫跗节,一般由2-5个亚节组成﹔为的是便于行走。
在最末节的端部还长着两个又硬又尖的爪,可以用它们来抓住物体。
行走是以三条腿为一组进行的,即一侧的前、后足与另一侧的中足为一组。
这样就形成了一个三角形支架结构,当这三条腿放在地面并向后蹬时,另外三条腿即抬起向前准备替换。
前足用爪固定物体后拉动虫体向前,中足用来支持并举起所属一侧的身体,后足则推动虫体前进,同时使虫体转向。
这种行走方式使昆虫可以随时随地停息下来,因为重心总是落在三角支架之内。
并不是所有成虫都用六条腿来行走,有些昆虫由于前足发生了特化,有了其他功用或退化,行走就主要靠中、后足来完成了。
大家最为熟悉的要算螳螂了,我们常可看到螳螂一对钳子般的前足高举在胸前,而由后面四条足支撑地面行走。
机器人等级考试搭建-六足步行机器人

第11章六足步行机器人仿生六足机器人又叫蜘蛛机器人,顾名思义,六足机器人架构中惜鉴了自然界中昆虫的行走方式,是多足机器人的一种。
11.1探索六足的行走方式是多样的,其中最典型的行走方式就是模仿六足纲昆虫的三角步态。
图 11.1六足步行机器人三角步态是什么样子呢?六足昆虫行走时,一般不是六足同时直线爬行,而是将三对足分成两组,每组三只足,以三角形支架结构交替前进,如图11.2所示。
分组情况是这样的:身体左侧的前后、足及右侧的屮足为一组,右侧的前足、后足和左侧的中足为另一组,分别组成两个三角形支架。
行走时接触地而的腿如绿方块所示,形成稳定的三角结构,这样模型通常会保持直立平稳的走姿而不会走路时跌跟头了。
这种六足机器人控制简单,不过动作单一,因为他的毎个关节都是通过机械连接完成,最后由一个统一的动力源控制。
另外,我们还能看到很多杂的六足机器人每一个关节都足分开控制的。
参照关节类动物的运动形式,这个六足机器人的每条腿的关节都是相对独立的,每个关节都是用180度的舵机来实现的,每条腿上三个关节,对应就是3个舵机,六条腿就是18个舵机。
不过这种用18个舵机支搾起来的机器人控制复杂,对电源的要求太高,还需要通过程序来控制,调试时间长。
我们综合以上的知识内容,制作一个六足移动机器人,即保证了机器人的控制苟单,也能实现机器人前后左心、左转右转的移动效果。
11.2制作7倍10倍这里要注意的是2倍的梁圆孔部分要朝上,和对面的正好相反10倍和12倍11.3六足运动方式六足机器人的运动方式为三角步态,上面我们简单介绍过,三角步态就是六足机器人的六只足分成了两组,组成了两个三角支架。
当一组三角形支架所有的足同时提起,另一机三角形的足原地不动,支撑身体并以中足为支点。
这一组的三脚架抬起到下落的过程中,前肢的构件向前迈进拉动身体向前,后足的构件将机器人向前推。
这一组落地,另一组的三只足抬起,重心落在这一组三角形支架的三足上,然后重复前—组的动作,之后互相轮换周而复始。
多足仿生机器人的设计和分析
江苏科技大学本科毕业论文多足仿生机器人的设计和分析The design of More than enough bionic robot and analysis摘要人类社会的发展,各种各样的机器人正渐渐的走进我们的视野,有很多的地方都用到了机器人,在机器人的领域里越来越多的人开始爱好上了机器人。
能更好的适应环境和地形是多足仿生机器人的优点,很多人的工作可以由机器人代替完成,科学价值和实际应用价值是很重要的。
复杂的多足机器人机构是不易制造的,机器人六条腿的运动也难以有效地调控,能让机器人选择最优秀的路径到达目的地是一个很让人思考的问题。
以昆虫活动时选用的三角步态行动为基础策划六足机器人,他的腿部有18个自由度,这是一个很好的行走机构,剖析他的道理,能安稳的的运转和走路,布局简单,容易设计制造,这个也是很重要的,本文还对舵机的设计进行了简易的讨论,本论文设计的六足仿生机器人,舵机类似是机器人肌肉机构,舵机角度控制精度高,机器人行走时稳定性高。
单片机和PLC是主要手段,负责逻辑的运算主要的是PLC,把输入信号然后处理再转换为脉冲发送给单片机,收到的PLC信号被单片机接受再驱动各舵机运行,使六足仿生机器人动作。
但本文不重点软件设计,主要是结构建模,步态规划分析。
关键词:六足机器人;仿生;步态规划。
AbstractDevelopment of human society , various robots are gradually into our field of vision , there are many places that are used in the robot , in the field of robotics in more and more people started loving on the robot . Better able to adapt to the environment and terrain are the advantages of multi- bionic robot , a lot of people 's work can be replaced by a robot to complete , scientific value and practical value is very important. Complex multi-legged robot mechanism is easy to manufacture , six-legged robot movement is difficult to effectively control, allowing the robot to select the best route to a destination is a very people thought. In multi-legged insect movement when using the tripod gait motion based design hexapod robot , his leg has 18 degrees of freedom , which is a good running gear, analyze his principles , can smooth running and walking , simple structure, easy to design and manufacture, this is very important, this paper also designed a simple steering the discussion , the paper design of biomimetic hexapod robot , steering muscles like a robot body , steering angle control and high accuracy high stability when walking robot . System uses a single chip plus PLC, which is primarily responsible for PLC logic operation , PLC based on the input signal after signal processing and converted to pulses sent to the microcontroller, the microcontroller is responsible for each servo drive will receive a run to complete the action to be performed . However, this article does not focus on software design , mainly structural modeling , gait analysis .Keywords : Hexapod robot; bionic; gait planning目录第一章绪论--------------------------------------------------------------------------------------------------------- 71.1多足机器人的背景与目的------------------------------------------------------------------------- 71.4六足仿生机器人的研究方面 --------------------------------------------------------------------- 10第二章六足仿生机器人的机构分析 ---------------------------------------------------------------------- 122.3六足仿生机器人主体设计------------------------------------------------------------------------ 132.4六足仿生机器人舵机的选择 -------------------------------------------------------------------- 14舵机驱动原理---------------------------------------------------------------------------------------------- 18驱动原理---------------------------------------------------------------------------------------------------- 18足------------------------------------------------------------------------------------------------------- 20机器人的足部要安装压力传感器,所以脚步结构需要突起的一部分,如三维图8所示:------------------------------------------------------------------------------------------------- 20小腿---------------------------------------------------------------------------------------------------- 21大腿---------------------------------------------------------------------------------------------------- 22支撑杆------------------------------------------------------------------------------------------------- 23舵机架------------------------------------------------------------------------------------------------- 23舵机架连接板 --------------------------------------------------------------------------------------- 25第三章六足仿生机器人的步态规划 ---------------------------------------------------------------------- 26 3.1步态分类---------------------------------------------------------------------------------------------------- 26一般来说,六足仿生机器人两组三角腿架的交替互换的一个顺序,在1899年的时候通过连续摄影的方法,研究了动物的步态行走,科学研究者做了好多的实验和研究,最近的一些年里各种成果和实验的重要结论不断地出现。
六足机器人设计参考
摘要六足机器人有强大的运动能力,采用类似生物的爬行机构进行运动,自动化程度高,可以提供给运动学、仿生学原理研究提供有力的工具。
本设计中六足机器人系统基于仿生学原理,采用六足昆虫的机械结构,通过控制18个舵机,采用三角步态和定点转弯等步态,实现六足机器人的姿态控制。
系统使用RF24L01射频模块进行遥控。
为提高响应速度和动作连贯性,六足机器人的驱动芯片采用ARM Cortex M4芯片,基于μC/OS-II操作系统,遥控器部分采用ARM9处理器S3C2440,基于Linux系统。
通过建立六足机器人的运动模型,运用正运动学和逆运动学对机器人进行分析,验证机器人步态的可靠性。
关键字:六足机器人,Linux,ARM,NRF24L01,运动学AbstractBionic hexapod walking robot has a strong ability of movement, the use of similar creatures crawling mechanism movement, high degree of automation, can be provided to the kinematics, the principle of bionics research provides powerful tool. Six feet in the design of this robot system based on bionics principle, the mechanical structure of the six-legged insect, through 18 steering gear control, use the gait, such as triangle gait and turning point to control the position ofsix-legged robot. Remote control system use RF24L01 rf modules. In order to improve the response speed and motion consistency, six-legged robot driver chip USES the ARM architecture (M4 chip, based on mu C/OS - II operation system, remote control part adopts ARM9 processorS3C2440, based on Linux system. By establishing a six-legged robot motion model, using forward kinematics and inverse kinematics analysis of robot, verify the reliability of the robot gait.KEYWORD:Bionic hexapod walking robot;Linux,ARM,NRF24L01;Kinematics目录1. 绪论2. 六足机器人的硬件搭建3. 操作系统的搭建4. 六足机器人的步态分析与实现5. 总结与展望1. 绪论1.1 多足机器人的发展状况目前,用于在人类不宜、不便或不能进入的地域进行独立探测的机器人主要分两种,一种是由轮子驱动的轮行机器人,另一种是基于仿生学的步行机器人。
六足仿生机器人
六足仿生机器人人们对机器人的幻想与追求已有3000多年的历史,人类希望制造一种像人一样的机器,以便代替人们完成各种工作。
1959年,第一台工业机器人在美国诞生,近几十年,各种用途的机器人相继问世,使人类的许多梦想变为现实。
随着机器人工作环境和工作任务的复杂化,要求机器人具备有更高的运动灵活性和特殊位置环境的适应性,机器人简单的轮子和履带的移动机构已不能适应多变复杂的环境要求。
在仿生技术、控制技术和制造技术不断发展的今天,各种各样的仿生机器人相继被研制出来,仿生机器人已经成为机器人家族重要的成员。
仿生爬行机器人是一种基于仿生学原理研制开发的新型足式机器人。
与传统的轮式或者履带机器人相比,足式机器人自由度多,可变性大、结构发杂、控制繁琐,但其在运动特性方面具有独特的优点:首先是足式机器人具有较好的机动性,对不平地面的适应能力十分突出,由于其立足点是离散的,与地面的接触面积较小,因而可以在可能达到的地面上选择最优支撑点,从而能够相对容易的通过松软地面以及跨过比较大的障碍;其次是足式机器人的运动系统可以实现主动隔振,允许机身运动轨迹与足轨迹解耦。
尽管地面高低不平,机身的运动仍可达到相对平稳。
本课题主要研究的内容是一种六足仿生机器人的机械机构部分的设计和分析,围绕六足仿生机器人的前沿技术,主要仿生对象为蚂蚁,主要实现机器人前后左右移动,具有良好的仿生特性,研究具有抗冲击性以及地形适应能力的仿生机设计技术,六足仿生机器人系统模型;研究六足机器人适应不同地形环境的能力。
研制系统设计与仿真等核心单元。
研制高速、高负载力、对典型非结构化地形具有高适应能力的六足仿生机器人,并开展系统结构、地形适应能力以及对抗控制实验验证。
本次设计的预期要达到的效果是可以实现灵活进退和转向,跨越障碍物,通过洼地和台阶并且保持平衡防止倾翻,能够实现实时避障,合理规划行走路线。
1、技术方案一、机器人功能介绍:a)可实现前进后退转弯等基本动作,加装传感器后对小障碍物越过、大障碍物绕开,具有遥控模式,可通过无线装置无线控制。